



2. 上海理工大学光电信息与计算机工程学院, 上海 200093
2. College of Optical-Electrical information and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China
0 引言
无线传感器网络(wireless sensor networks,WSN)[1-5]由大量低成本、具有通信与数据处理能力的传感器节点组成,实验中根据分布式协议以多跳通信方式构成的自组织网络系统,能根据环境需求智能化感知、采集其覆盖区域内的信息并完成指定任务。1999年,无线传感器网络技术被《商业周刊》列为21世纪最有影响力的21项技术之一。2006年,在我国发布的《国家中长期科学与技术发展规划纲要》中,信息技术层面确定了3个尖端方向,其中两项为智能感知和自组织网技术。无线传感器网络作为一种全新的获取和处理信息的方式,在各种领域中得到了应用[6],例如事件检测(火灾、洪水、冰雹),监控(工业、农业、医疗保健、环境),节能路线,勘探(深水、地下、外层空间)等[7]。
在许多实际应用中,例如搜索和救援、目标跟踪和检测以及协作感测等,仅在目标的位置已知的情况下才可实现。此外,在室内和室外环境中对人和物体的精确定位可以在经济和商业服务中心实现新的应用,例如位置感知车辆、仓库中的资产管理、导航等[8-12]。由于网络中的每个设备都可以更快更好地响应环境变化,因此可以提高日常生活中的安全性和效率。
在室外环境中,全球定位系统(global positioning system,GPS)是最常用的定位方案。但是在室内环境中,通常会出现障碍物的遮挡,以及金属结构的屏蔽等问题,使得室内定位经常会出现因为信号不稳定而无法定位的情况[13]。为了解决这一问题,科研人员做了大量的研究工作,提出了不同的室内定位应用方案[14]。在这些应用中,最重要的技术为无线传感器网络的定位技术,它是无线传感器网络进行采集和传输信息、目标跟踪等应用的保障和支撑。因此,对无线传感器网络的定位技术展开研究具有较高的理论意义与工程价值。
面对不同的室内场景的需求,科研人员做了大量的研究工作,分别提出了基于测距的和非测距的定位方法,并将红外、超声波、蓝牙、Wi-Fi、射频识别(radio frequency identification,RFID)、超宽频(ultra wide band,UWB)等技术应用于定位系统中。
目前,多数对基于无线传感器网络定位技术的研究的假设较为理想,但是在实际环境中,由于室内环境中信道条件复杂、障碍物遮挡、多径效应等的存在,会使得信号传播速率产生明显的偏差,从而导致无法获得精确的位置效果,这种因素通常被称为非视距(non-line-of-sight,NLOS)因素[15-20]。在不同的室内环境中,NLOS因素各不相同,如何寻找NLOS的特征也是目前亟待解决的问题。此外,由于不同定位技术与原理的机制和性能上的差异性,不同的技术可在不同的条件下发挥其性能优势。因此,基于多传感器融合的定位技术也越来越引起重视。
本文将从非测距定位和测距定位两种方式展开阐述。针对测距定位,分别从到达时间(time of arrival,TOA)、到达时间差(time difference of arrival,TDOA)、到达角(angle of arrival,AOA)和接收信号强度(receive signal strength,RSS)这4种测量方法展开了分析。其次,对红外技术、超声波技术、蓝牙技术、Wi-Fi技术、射频识别技术、ZigBee技术和超宽频技术的优缺点以及现状展开了描述。然后,重点阐述了在基于测距定位下三边定位法、扩展卡尔曼滤波定位法以及最大似然估计定位法这3种定位算法框架。接着分别分析了基于NLOS误差补偿和多传感器融合这两个热点问题的研究现状。最后,提出了无线传感器网络定位在应用方面的挑战。
本文所讨论的无线传感器网络定位框架图如图 1所示。

|
| 图 1 无线传感器网络定位框架图 Fig.1 Wireless sensor network localization framework |
基于非测距的定位方法不需要已知距离、角度或者信号强度,其优势在于硬件开销小,配置简单,系统扩展性较高等优点。该方法通常将一部分已知位置的节点作为锚节点,根据拓扑关系或者事件的先后顺序来获取其他待测节点的位置。该方法在无线传感器网络使用定位中被广泛应用。非测距定位算法的典型代表有质心算法、距离向量跳(distance vector-hop,DV-hop)算法、多维尺度最大后验概率估计(multidimensional scaling MAP,MDS-MAP)算法、近似三角形内点测量(approximate point-in-triangulation,APIT)算法和凸规划算法等。
目前已经有很多学者对非测距的定位算法展开了研究[21-24]。大多数解决方案都是基于点对点定位系统(Ad-hoc positioning system,APS)提出的方法[21],并且将APS视为无线传感器网络非测距定位算法的基准。在APS中,提出了一种分布式的算法,使用无线传感器网络中的所有传感器来获取大概的位置信息。APS简单实用,若网络中的节点分布密集且均匀,则可以得到较好的位置估计,反之;若节点分布稀疏或者不均匀,其性能和准确性将大幅度降低。基于此,Wang提出了一种新型的基于期望跳数的定位算法(localization algorithm using expected hop progress,LAEP)算法[25],该算法基于对无线传感器网络中具有随机部署的传感器和任意节点密度的Hop进程进行准确的分析,可以准确计算任何一对传感器之间的距离。Zhang提出了一种新型节能算法[26],这种算法可以在各种情况下实现高采样效率,此外,该算法使用传感器节点的估计位置提高了定位精度。Gui在DV-hop算法的基础上,提出了校验DV-hop和3锚节点选择DV-hop两种改进算法[27],提高了原有算法的定位精度,此外还提出了一种新的DV-hop定位协议,整体提升了定位的性能。Wu定义了一种新的测度[28],通过两个邻域的邻近度与其邻域划分联系起来解决定位问题,在此基础上,提出了一种新的非测距定位算法,得到了较好的定位精度。
1.2 基于测距的定位方式虽然基于非测距的定位方法能够满足一般的定位场合要求,但是该方法并不适用于精确定位系统。基于测距的方法是从无线电信号的不同特征中提取基于距离、角度等测量信息,例如TOA[29-31]、TDOA[32-35]、AOA[36-38]和RSS[39-40]。该方法能够获得目标的距离、角度、信号强度等信息,为精确定位提供了必要的条件。对于4种测量方法,目前国内外都有一定的研究。Venkatraman提出了一种新型的定位技术[41],该技术可以在存在NLOS距离的TOA测量下能够估计真实位置或LOS距离。当只能从3个基站获得测量值时,该方法使用了约束非线性方法,从布局的几何形状和测量的距离圆中提取NLOS误差的界限与真实范围的关系,从而实现精确定位。Paul提出了一种基于Sigma点卡尔曼平滑(Sigma-point Kalman smooth,SPKS)的定位与跟踪算法[42],该算法融合了人类行走的动态模型并结合一些低成本RSS传感器来跟踪目标的位置和速度。Zheng在有限的信息基础上寻找了一个近似有效的替代方法来评估AOA的估计及精度,并设计了加权定位算法,对其中每个AOA估计精度相关的因子进行加权,从而提高了定位性能[43]。
无线传感器网络的定位方式可以总结如表 1所示。
| 定位方式 | 测量方式 | 优势 | 缺点 |
| 基于非测距 | — | 硬件开销小 配置简单 扩展性高 |
定位精度低 |
| 基于测距 | RSS TOA TDOA AOA |
定位精度高 | 部署成本高 |
无线通信技术的飞速发展带动了人们对无线定位技术研究的热情,卫星定位、红外线定位、超声波定位等技术成为当今人们研究的主流定位技术。而每种技术都有自身的优缺点,因此需要根据相应的场景需求和任务来选择合适的定位技术。表 2列举了不同的无线技术,总结了这些技术在定位中的优缺点。
| 定位技术 | 优势 | 缺点 |
| 红外技术 | 能耗低,部署成本较低 | 穿透能力差,无法适用于非视距环境 |
| 超声波技术 | 能耗较低,可适用于水下环境 | 部署有较高的要求,易受其他声波的干扰 |
| 蓝牙技术 | 高通量,接受范围较广,功耗低 | 定位精度较低,易受外界干扰 |
| Wi-Fi技术 | 不需要额外的硬件,部署容易,覆盖面广 | 定位精度较低,易受外界干扰 |
| 射频识别技术 | 功耗低,可同时快速读取多个标签 | 易受外界干扰,无源标签识别距离低 |
| ZigBee技术 | 功耗低,不需要过高的网络带宽 | 需要额外的硬件,目前无法直接与手机建立连接 |
| 超宽频技术 | 精度高,抗干扰能力强 | 通信距离短,成本高,需要额外的硬件 |
1) 红外技术
红外技术目标定位的工作原理主要是通过使用红外线来标识已被调制的红外射线,通过部署的传感器接收红外线从而达到室内目标的定位。在定位过程中,节点需要结合其接收到的信号的强度、误码率或到达时间差等物理属性来处理位置信息,但是广泛应用的低成本红外发射器和接收器并不能很好地获得这些特性。为了解决这一问题,Sekercioglu开发了一种仅依赖于数据帧接收,并且能够在低误差范围内估计红外信号源角方向的定位系统,并提出了锚跳距离加权定位算法来减小定位误差[44]。在定位环境中,不可避免地会出现物体遮挡。由于红外射线对穿透障碍物的能力差,且容易受荧光灯或其他光源的影响和干扰,因此会降低测量的准确性。因此,Arbula提出了一种新型的传感器,利用短距离红外信号在视距范围内提供高精度的到达角估计,该传感器利用无线传感器网络的特性避免了非视距传播的问题[45]。
2) 超声波技术
超声波目前已经被广泛应用于定位系统的设计中,在视距传播的环境下,使用超声信号是一种十分有竞争力的方案,其优势在于较高的测距和定位精度以及其测量传感器低成本和低功耗的特性。此外,由于电磁波难以在水下传播,超声波作为另一种定位技术,在该环境下得以广泛应用。在基于超声波的测距方式中,尽管基于AOA和RSS的方法可以用于定位[46],但是由于声波的传播特性以及基于时间域的可测量性,基于TOA、TDOA和往返时间(round-trip time,RTT)的测距方法更广泛应用于实际环境中[47-48]。但是在复杂的定位环境下,超声波信号易受到其它声波信号的干扰。
为了提高定位精度,研究者通常会考虑多种测量方式混合的算法,其中,基于TOA和AOA融合估计的超声定位方法,能够在具有多径效应的条件下,达到误差低于10 cm的定位精度[46]。目前,在市面上,存在着多种无线通信的低功耗芯片,其中,部分网络采用的是时分多址(time division multiple access,TDMA),其中跳频序列通常是硬件编码的,因此,跳频随机延迟可能无法满足超声定位系统的同步精度要求。为了解决此类问题,Angelis提出了一种新型的基于TDOA测量的定位技术,这种方法通过使用基于啁啾脉冲流的超声波来估计距离和位置,能够识别由于发送节点和接收节点之间缺乏同步而引入的不确定源[47]。但是,当啁啾信号用于定位时,会存在多址干扰(multiple-access interference,MAI)问题[48],Khyam利用雷达和数据通信中目前使用的正交线性调频波形来解决多路访问问题[49],该方法的优势在于能够充分利用各个波形的全部带宽,同时还具有经典啁啾的所有优势。
除了多种测量方式混合的方法,Paredes提出了声光混合的定位系统,该系统的超声模块在二维多变化过程后,依次发射5个扩频超声码来计算水平车辆位置,然后基于深度相机提供目标高度的初步估计,最后通过递归算法进行位置的精确估计[50]。
3) 蓝牙技术
蓝牙低能耗(bluetooth low energy,BLE)技术是一种短距离低功耗的无线传输技术。与其它技术相比,BLE提供了一个完整的不依赖于外部电源的无线硬件方案[51]。基于BLE的定位系统易于实现和扩展,易于整合于智能手机、平板电脑等智能设备中[52],并且不会对当前基础设施造成重大影响,因此BLE技术是基于无线传感器网络定位需求的热门选择。
在现有的研究中,已经提出并评估了几种基于BLE定位系统的创新解决方案,包括停车区驾驶员辅助系统[53]、停车场汽车搜索和导航系统[54]、用于智能家居的多住宅活动标签解决方案[55]等。
虽然BLE可以用于不同的定位技术,例如RSSI、AOA和TOA等。但是,基于RSS的系统相对简单易用,因此大多数现有的基于BLE的定位解决方案仍依赖于RSS输入。为了提高定位精度,可采用BLE和惯导[56]或接近式传感器[57]融合的定位系统,从而抑制BLE的噪声对系统的影响。
基于RSSI指纹的技术被广泛应用于蓝牙定位系统之中,然而经典的基于RSSI指纹的定位方法也有着明显的缺陷。针对不同的蓝牙设备,需要做不同的RSSI校准,而且RSSI指纹数据必须在整个定位区域内逐点采集等。对此,Li提出了一种新的基于蓝牙RSSI指纹的三维定位方法,该方法利用RSSI差、距离比、虚拟指纹和双向测距来克服传统指纹定位方法上的缺陷[58]。此外,针对蓝牙RSSI易受到多径效应和剧烈波动的影响,需要采用多种先进的信号处理解决方法。Malekzadeh提出了一种基于高斯混合模型的新框架,以更准确地表示不同区域内RSSI值的潜在分布,分别使用卡尔曼滤波算法和加权最近邻算法进行位置估计,从而达到抑制噪声,提高精度的目的[59]。
4) Wi-Fi技术
Wi-Fi定位技术是在目标区域内部署多个锚节点,从而保证在区域内能够被所有锚节点的无线信号所覆盖,然后根据接收端接收到的无线信号的特征来估计目标的位置信息。该技术的优势在于Wi-Fi网络部署的成本低,而且目前Wi-Fi网络的覆盖面广[60],此外,通常不需要额外配备专属的接收设备,人们常用的手机即可成为一个有效的接收器,降低了定位系统的成本,也增加了定位的便捷性[61]。当前较为流行的Wi-Fi定位是无线局域网络系列标准IEEE 802.11的一种定位解决方案。该方案易于安装,布置方便。但是基于Wi-Fi的定位技术定位性能受外界环境影响较大,在存在高干扰的环境中,无法保证有效的精度。
由于RSS的简单性和硬件性能要求低等特点,现有的基于Wi-Fi的定位系统通常使用RSS方法实现,其中,可考虑使用概率方法对RSS数据进行位置估计[62]。但是这类方法有两个缺点[63],首先,由于多径效应,RSS值通常随时间具有高可变性,这种高可变性甚至对设备来说,也会引入大量定位误差,另外,RSS值是粗略信息,不会利用正交频分复用系统中的子载波来获得更多的多径信息。为了解决此类问题,可以通过Wi-Fi网卡中获得信道状态信息(channel state information,CSI),这些信息可以作为指纹信息,从而提高定位的性能。因此,Wang提出了一种新的基于深度学习的指纹系统,在离线阶段,使用深度网络对指纹数据进行训练,并采用贪婪学习算法逐层训练权值以降低复杂度,在线阶段,使用径向基函数的概率方法获得位置估计。
5) 射频识别技术
射频识别(radio frequency identification,RFID)技术也是目前广泛被使用的一种技术,它是一种比较典型的非接触性射频信息数据传输和信息识别的应用技术。这种技术作用距离较短,成本较低。对于标签式定位方法,该技术是实现粗定位的优先选择,可用于有轨AGV(automated guided vehicle)小车的定位环境中,该技术的定位性能稳定,可靠性高,通常可用于GPS的辅助定位系统,针对无GPS系统的车辆,可使用单一对等定位方案来计算其位置;当无法获取GPS定位信息的车辆遇到具有精确位置数据的车辆时,它们分别通过RFID和IEEE 802.11无线电交换位置等信息,从而实现对定位不准确估计的校正[64]。
此外,针对现有的RFID定位方案,可采用基于深度学习的三维定位方法[65]:将基于射频识别的绝对定位和相对定位相结合,分析接收信号强度和相位的变化特征,通过深度学习进一步挖掘数据特征。此外,也可以考虑基于相控阵天线和深度神经网络相结合的RFID定位方法[66],这种方法具有较好的泛化能力,能够精确估计目标在三维环境中的位置。
RFID技术与视觉技术相结合的定位方法同样是当前研究的热点问题,可将一个轻型2D单目摄像机连接到2个天线上,将RFID与计算机视觉融合在一起,在3D空间中进行静态射频识别[67]。该算法的优势在于不需要在预先指定的区域内搜索所有可能的位置,而且引入了水平精度因子(horizontal dilution of precision,HDOP)的概念来测量定位效果的置信度。
6) ZigBee技术
ZigBee协议是为无线传感器网络量身定制的通信协议,是一种短距离、低速率的无线网络技术,它具备了自己的无线电标准,在多个传感器之间进行相互协调通信可以实现定位需求,而且该技术的耗能低,可以用接力的方式直接通过各种无线电波向不同节点传输数据。这种技术通常使用RSSI测量方法来获取距离信息,从而实现目标的位置估计,是目前常用的定位技术之一,该技术在智能家居领域中具有广泛的应用[68]。
为了提高定位精度,可考虑基于ZigBee的RSSI和里程计融合的定位系统,通过改进路径损耗传播模型和使用凸搜索方法来优化加权参数,该框架相对于传统的方法具有更少的计算量,而且定位性能具有显著的提高[69]。
此外,为了解决RSSI建模的困难,Han提出了一种基于改进神经网络优化算法的ZigBee定位算法[70],其中使用QPSO(quantum particle swarm optimization)来优化广义神经网络的平滑参数,使用目标节点的预测坐标与实际坐标之间的均方根误差来构造适应度函数。
7) 超宽频技术
起初,超宽频(ultra wide band,UWB)技术是一种军用技术。在2002年2月,美国联邦通信委员会(federal communications commission,FCC)正式批准将美国UWB技术广泛民用,被业界称为UWB通信技术产业发展进程史上的重大里程碑,此举也促使了UWB通信技术和产业迅猛的发展。在此后的十几年间,UWB的相关产品研发与生产技术都取得了较大的进步。2004年IEEE发布了802.15.4a信道模型,为评估超宽带测距定位算法的综合性能和应用提供了平台。UWB技术在定位技术中占据着重要的技术地位和作用。其主要特点是定位精度高,可达到厘米级[71],并且抗干扰性能强,可靠性好,是高精度定位系统的优选技术。
由于其优越的特性,在人员、物体、车辆等场景的精确定位需求下有着广泛的应用。然而,多径效应和非视距因素依旧是UWB定位的技术难题。因此,基于惯导系统和UWB系统融合的方式依旧是解决此类问题的重要手段[72-73]。这种系统可以对惯性传感器的随机误差进行分析和预滤波,利用互补滤波器获得目标的姿态信息,并使用双态卡尔曼滤波器提高了定位精度。此外,为了解决NLOS误差问题,Wang引入了一种新的基于半监督学习方法来完成NLOS的识别和抑制,该方法的NLOS识别率提高到了94%,极大提高了定位精度[74]。
3 无线传感器网络定位测量方法 3.1 基于RSS的定位RSSI指的是接收信号强度指示。无线信号在传播的过程中,其信号强度随着传播距离的增加而减小,根据这一特点,可以计算得到接收信号强度与距离的关系:
|
(1) |
其中,P0为参考信号强度,d0为参考信号强度对应的传输距离,n为路径损耗指数,P为接收到的信号强度。路径损耗指数n通常与环境有关,如表 3所示,为在不同的环境中路径损耗指数n的典型值范围。
| 环境 | n的取值 |
| 空旷的空间 | 2 |
| 遮蔽的城市空间 | 2.7~5 |
| 视距环境 | 1.6~1.8 |
| 存在遮挡的空间 | 4~6 |
在通常情况下,参考信号强度取单位距离下的接收信号强度,即d0=1 m,此时的接收信号强度可以用来A表示,因此,简化后的信号衰减模型可以表示如下:
|
(2) |
从式(2)可以看出,如果参数A和n已知,那么就可以得到接收信号强度P与距离d之间的关系,此时若接收信号强度已知,则可以推算出距离d:

|
(3) |
然而在实际测量中通常存在噪声干扰。因此式(2)可以表示为

|
(4) |
其中,m表示测量噪声,其服从零均值的高斯分布,Δn表示非视距环境下的路径损耗指数。如果为视距传播,则Δn=0,反之,Δn>0。
因此,可以得到存在噪声的距离表达式:

|
(5) |
目前,研究者们针对基于RSS路径耗散模型的定位问题进行了大量的研究工作。在实现目标位置估计的方法中,最大似然估计的解因具有渐进最优的性能,从而成为定位方法的优选。然而,最大似然估计的目标函数可能具有多个局部最优解,即目标函数为非凸,从而使得寻找全局最优解变得困难。因此,Tomic提出了一种基于凸优化的方法来解决此类定位问题[39]。该方法提出了一种新的非凸估计,该方法能够在非协同定位和协同定位的情况下,通过使用二阶锥规划和半定规划的有效凸松弛来设计新的估计器。除了最大似然估计方法,贝叶斯估计也是解决此类问题的重要方法,Kaltiokalli证明了贝叶斯滤波器几乎能够逼近后验克拉美罗下界,并且针对无线设备定位和跟踪问题,提出了一种新的基于RSS的贝叶斯滤波器[75]。所提出的滤波器通过利用成像的方法的位置估计对贝叶斯滤波器的测量模型进行了扩展,从而使得该滤波器的测量残差受到成像方法的位置误差的影响,因此,这种滤波器同时具有成像方法的鲁棒性和贝叶斯滤波器的跟踪精度。
由于定位环境的复杂性,RSS路径耗散模型在不同的环境下,其模型参数存在较大差异,甚至在部分环境中,受非视距、多径效应等干扰下,使得该模型无法适用。因此,基于RSS指纹的方法逐渐广泛应用。在实践过程中,指纹数据库的不完整可能会导致局部甚至全局位置估计精度下降,因此,如何处理不完整的指纹数据库成为一个重要的研究问题。Talvitie考虑了一种具有真实覆盖间隙的不完整指纹数据库,并研究了几种插值和外推方法在恢复丢失指纹数据方面的性能[76]。此外,还研究了累积的RSS误差分布,揭示了误差统计量的离散性对用户定位精度的影响。
为了应对庞大网络的计算问题,部分研究将集中式网络定位问题扩展为分布式网络定位问题,Tomic解决了在分布式网络下基于距离和角度的混合定位问题[36]。Liu提出了一种基于RSS分布的定位技术,这种技术无需密集部署即可获得较高的定位精度[77]。其在离线阶段可以通过基于RSS分布式定位(RSS Distribution-based Localization,RDL) 进行位置估计,在线阶段可以精确地识别移动轨迹。
3.2 基于TOA的定位TOA指的是到达时间,即无线信号从发射端到接收端所经过的时间,在TOA模型下不考虑信号衰减因素,但是该方法对硬件的处理能力要求较高,需要能精确识别信号的传输时间差。其模型描述如下所示:
|
(6) |
其中,c为信号的传播速度,一般表示为真空下的光速,tr表示接收端接收信号时的时间戳,ts表示发送端发送信号时的时间戳。在数据传输中,传输的信号附带发送端的时间戳,接收端接收到信号后,将自身的时间与该时间戳进行比对,从而获得时间差。要实现这种目的,则要求所有的锚节点和未知节点的时钟同步。这种方法又被称为单向TOA方法。然而在工程应用中,将所有锚节点和未知节点的时钟设置同步是很困难的,因此常常采用双向TOA方法,即从发射端发送带时间戳的信号,接收端接收信号后,再将信号发送给原发送端,此时发送端只需比对接收信号和发送信号的时刻即可,该时间差为信号往返传输的距离,因此,测量距离可以表示为
|
(7) |
其中,t′s和t′r分别为发送端发送信号的时间和接收到的返回信号的时间。使用双向TOA方法的优势在于不需要节点的时钟同步,提高了系统的可靠性。
然而在测量中,也需要考虑测量噪声和NLOS噪声,因此带噪声的测量模型表示如下:
|
(8) |
其中,dr为真实的距离大小,m为服从零均值高斯分布的测量噪声,η为TOA测量中的非视距噪声,通常满足η≥0。
在TOA定位方法中,NLOS亦是影响定位精度的重要因素。Xiong为了处理由NLOS误差引入的多维相似性(multi-dimensional similarity,MDS)矩阵中的行列结构异常值,提出了一种新的鲁棒矩阵逼近方案[78]。Katwe等研究了在NLOS环境中通过TOA和RSS测量混合的精确定位问题,利用平均NLOS效应,提出了一个非线性加权最小二乘问题[79]。然后用半定松弛技术解决了非线性最小二乘问题。上述所提出的两种方法均不需要任何NLOS信息的先验知识,并且具有相对较低的复杂度。
为了节约硬件资源,对于多目标的定位,通常可采用协同定位的方式,然而在NLOS环境中,协同定位的精度会严重下降。因此,Zhang通过研究节点之间的拓扑关系,提出了一种基于拓扑单元NLOS抑制的协同定位算法[80]。这种算法是在经典的多维标度框架下实现的。利用视距矩阵成功地识别了NLOS测量的相邻拓扑单元,并利用拓扑单元重新估计了NLOS测量。针对三维协同无线传感器网络中的多目标定位问题,Xiong提出了一种新的混合接收信号强度和到达时间定位方案[81]。该方案在引入路径损耗差异变量的同时,结合了到达时间和接收信号强度技术,并基于加权最小二乘准则,推导出多目标位置的粗解。最后,通过目标与另一个目标之间的协作无线通信来优化所获得的目标的位置。
3.3 基于TDOA的定位TDOA指的是到达时间差。在网络中,每个锚节点距离未知节点的距离通常不相同。当锚节点向未知节点发送信号时,由于距离的差异,未知节点接收到的信号时间往往不同,因此产生了一个时间差,根据该时间差,即可计算出未知节点与不同锚节点的距离差值,该模型可以描述为
|
(9) |
其中,tr1表示未知节点接收到第一个锚节点的信号的时间,tr2表示未知节点接收到的第二个锚节点的信号的时间。由此可以看出未知节点与锚节点之间不需要实现时钟同步。使用TDOA方法在实现定位的过程中也起着非常重要的作用。
当两个锚节点位置固定且其与未知节点距离差固定时,其轨迹为双曲线的其中一条。如果A、B和C均为锚节点,M点为未知节点,已知MB与MA的距离差,以及MB与MC的距离差,则这两个距离差的轨迹如图 2所示,两条单曲线的交点M即为未知节点的位置。

|
| 图 2 TDOA测量模型示意图 Fig.2 Schematic diagram of TDOA measurement model |
在大规模无线传感器网络中,由于传感器节点的通信范围和电池功率有限,通常不可能使用所有的传感器来完成定位,因此,在TDOA定位的过程中,存在着最优传感器的选择问题。Dai提出了两种近似最优的传感器选择方法:一种是基于原始的TDOA模型,另一种是基于变换的TOA模型,这两种方法的目的都是在选定传感器的情况下,使克拉美罗下界的迹最小化[82]。针对此类问题,Li提出了一个多目标优化框架来最小化两个相互冲突的目标,即跟踪精度和数量估计,引入了2个布尔向量来分别表示公共参考传感器和普通传感器。然后将传感器选择问题表示为多目标优化问题,再利用线性加权和方法将其转化为单目标优化问题[83]。
此外,在存在传感器位置误差的情况下,Zou使用信号TDOA测量来估计联合源位置和传播速度[84]。由于该问题的最大似然估计需要合适的初值或需要穷举网格搜索才能获得全局最优解,因此提出了一种基于半定规划的定位算法来有效地解决此类问题。除了传感器位置偏差的情况,时钟同步问题亦是影响精度的重要因素。Zou在之前的工作基础上,对算法框架进行了推广,利用多个定标发射器同时减小传感器位置误差和时钟同步偏差[85]。
3.4 基于AOA的定位AOA指的是到达角,即根据信号的传播路径和预设的参考线所构成的相关角度进行定位。其几何关系如图 3所示。

|
| 图 3 AOA方法原理图 Fig.3 AOA method schematic diagram |
图 3中,M点为未知节点,其坐标设为(x,y),A、B和C分别为锚节点的位置,位置信息已知且分别设置为(x1,y2),(x2,y2),(x3,y3)。3个圆两两相交于A、M、C,A、M、B以及B、M、C,且分别位于圆O1、O2和O3上,设3个圆心的坐标分别为(xO1,yO1)、(xO2,yO2)和(xO3,yO3),并设这3个圆的半径分别为R1、R2和R3。根据圆的性质,有∠AO1C=2π-2∠AMC。其中∠AMC可通过AOA方法直接获得。因此,根据距离公式和余弦定理,可以得到:
|
(10) |
求解式(10)的方程组,即可得到3个圆心和半径,然后通过三边定位方法即可得到未知节点的位置。
同理,也可以根据△ABC的性质,通过余弦定理求解方程组也可得到MA、MB和MC的大小,即未知节点与锚节点之间的距离信息。
在实践中,基于AOA的方法需要增加阵列天线以及设置多重的接收器等,因此对节点设备的性能和功耗要求更高,但是,与TOA和TDOA方法相比,AOA定位并不需要与信号源同步,甚至不需要在分布式接收器之间同步[86]。
目前,在AOA定位研究中,研究者们通常会忽略空间宽带效应。但是,在毫米波/太赫兹宽带大规模多输入多输出中,空间宽带效应是不可以忽略的。为了解决此类问题,Wu基于空间宽带效应提出了新的空间频率变换模式,并在这些模式与包含AOA的离散傅里叶变换波束之间建立了一对一的映射关系[87]。此外,由于AOA估计系统的较高部署成本和复杂性,针对基于AOA的低功耗广域网技术只能通过降低成本和简化系统复杂性来实现,因此,BniLam开发了一种适用于长距离通信网络的AOA定位系统[88]。该系统在LOS和NLOS条件下都能提供稳定、准确的AOA估计。
除了单一的AOA定位系统,在应用中也通常采用多种方式组合的方法实现精确定位。例如,Qi提出了一种基于SDP松弛方法的RSS和AOA混合定位系统,该系统引入了基于距离的平方半定规划和基于平方距离的平方半定规划算法,在考虑发射频率已知或者未知的情况下进行目标位置估计[89]。此外,由于RSS和AOA混合定位系统的计算复杂性,Costa提出了一种单次迭代方法降低了运算复杂度,首先将定位问题转化成一种非凸最小二乘问题,然后采用二阶锥规划将该问题转化为凸优化问题[90]。该方法不仅具有更低的复杂度,而且能够达到理想的性能。
如表 4所示,总结了不同的测量方法下的优缺点。
| 测量方法 | 优势 | 缺点 |
| RSS | 无需进行时间同步和角度测量,易于实现 | 易受噪声、多径效应和非视距等因素的干扰,在复杂环境下可能要构建指纹库 |
| TOA | 不需要任何指纹数据库,可以达到较高定位精度 | 需要时间同步,受多径效应和加性噪声等影响,在窄带中难以实现 |
| TDOA | 不需要任何指纹数据库,不需要被测节点和锚节点之间的时间同步 | 在窄带中难以实现,锚节点之间需要时间同步,受多径效应和加性噪声等影响 |
| AOA | 测量节点之间不需要时间同步,能够达到较高精度 | 部署成本高,需要部署天线阵列,受多径效应和加性噪声等影响 |
三边定位法是在二维环境中最为常用的一种定位算法,其原理图如图 4所示。其中,A、B、C三个点分别是锚节点的位置,坐标信息分别设置为(x1,y1)、(x2,y2)和(x3,y3),M为待求的节点(x,y)。根据距离公式,可得
|
(11) |

|
| 图 4 三边测量法 Fig.4 Trilateral measurement |
通过解方程组,可以得到最终目标的位置解(x,y)。
在实际工程中,由于噪声的存在,图 3中的3个圆通常无法交于一点,从而会导致方程组无解。为了解决这个问题,通常使用最小二乘定位方法来寻找近似解,从而使得方程组的残差最小。
将式(11)的前两项分别减去第三项,可得

|
(12) |
式(12)可进一步转化成如下的矩阵形式:

|
(13) |
其中,
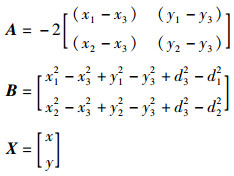
|
为了获得最优近似解,引入残差平方和函数S,得到
|
(14) |
当

|
(15) |
对式(14)求导,并令其等于0,可得

|
(16) |
如果ATA是非奇异矩阵,则有

|
(17) |
因此,通过式(17)即可获得最优近似解。值得注意的是,在式中要求ATA是非奇异矩阵。A矩阵是由锚节点的位置决定的,因此锚节点的放置只需满足ATA非奇异即可。
近几年,有不少研究者针对三边定位方法进行了改进,甚至在三边定位算法的基础上提出了可以达到更高精度标准的定位系统。其中,Wang提出了一种基于三边测量定位的二次加权质心算法来提高未知定位节点的定位精度[91]。这种算法与传统的算法相比,拥有更好的性能。此外,Wang提出了一种基于相对位置图的多无线传感器网络鲁棒定位算法[92],首先,提出了一种3最远邻域三边定位算法来确定初始位置,然后提出了一种抗攻击的距离残差方法来抵消测量不一致导致的误差。为了提高无线传感器网络内部定位精度,优化节点资源配置,从提高测量精度和优化信标节点布局的角度,可考虑基于RSSI的等弧三边定位算法,该算法模型能够保证未知节点的运动轨迹始终位于最佳通信距离内,以提高测量精度[93]。
4.2 扩展卡尔曼滤波定位法卡尔曼滤波器(Kalman filter,KF)被广泛认为是一种在线性系统中抑制高斯白噪声的最优估计方法,扩展卡尔曼滤波器(extended Kalman filter,EKF)是卡尔曼滤波器在非线性系统上的推广。在定位系统中,测量向量虽然是非线性的,但是其噪声服从高斯分布,符合EKF的使用条件,因此使用EKF的方法来实现定位也能达到理想的性能[94]。
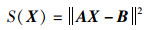
在预测阶段需要预测目标的运动模型,该算法通常采用位置—速度模型(PV模型)来描述。在二维空间中,被测目标的状态向量可以表示为

|
(18) |
其中,x和y表示目标在坐标系x轴和y轴上的坐标,vx和vy分别表示目标在x轴和y轴上的速度大小,因此目标的运动模型可以描述为
|
(19) |
其中,xk、yk、vx,k和分别表示在k时刻的位置和速度,xk-1、yk-1、vx,k-1和vy,k分别表示在k-1时刻的位置和速度,Δt为采样时间。注意,在预测阶段认为上一时刻的速度和当前时刻相同,如果在定位系统中使用了其他辅助测量传感器,例如惯性传感器,可对速度向量做更精准的预测。
距离测量可以表示为

|
(20) |
根据式(20),可得测量向量

|
(21) |
其中,N为锚节点的个数。
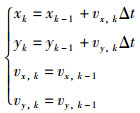
由于测量向量是非线性的,因此需要获得测量矩阵的雅可比矩阵,如式(22)所示。
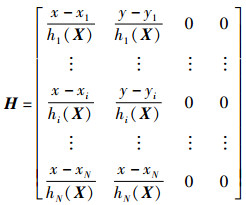
|
(22) |
在EKF的过程中存在两个协方差矩阵需要预先配置。对于测量误差协方差矩阵R,由于锚节点和未知节点的测量之间相互独立,因此可以设置为对角矩阵,其对角线上的元素即目标的方差大小,可以通过多次测量获取其统计特性。过程误差协方差矩阵Q通常与运动轨迹特征有关,可在多次实验中调整为理想取值。
据此,EKF过程可以描述如下:
1) 预测阶段:
|
(23) |
其中,
|
Xk-表示预测的状态向量,Pk-1表示k-1时刻的状态误差协方差矩阵,Pk-表示预测状态误差协方差矩阵。
2) 更新阶段:
|
(24) |
其中,Kk为卡尔曼增益,Hk为在k时刻h(Xk-)向量的雅可比矩阵,dk表示在k时刻的测量向量。Xk即为在k时刻的EKF的最优估计。
在无线传感器网络定位中,通常使用等速运动(constant velocity,CV)模型来表示目标物体的运动,在CV运动模型中,过程噪声协方差Q起着关键作用,但它是一个高度不确定的参数,传统的EKF算法采用经验法确定恒定的Q值,然而不适当的Q值会导致精度的下降。因此,Pak提出了一种切换扩展卡尔曼滤波算法,该算法构造了由多个EKF组成的滤波器组,并使用马氏距离评估最优的滤波器[95]。该方法对Q值进行精确选择,即可实现精确定位。
同样地,Ullah提出了另一种改进方法,即提出了一种边缘计算的EKF定位算法[96],在该方法中,作者明确地推导出了EKF定位的解析表达式,该表达式可用于分析不同条件下的定位估计。此外,协方差矩阵和雅可比矩阵都同时应用于运动模型和观测模型,增加了所提出算法对环境的适应性,实验结果表明,所提出的定位算法在不同方面都表现出良好的准确性。
4.3 最大似然估计定位方法最大似然估计方法是在定位中基于统计理论的常用方法,由于测量噪声符合零均值的高斯分布,因此可以将最大似然估计方法应用于定位中。
测量噪声的概率密度函数描述如下:
|
(25) |
其中,σ0表示测量噪声的标准差,z为测量距离的大小。根据式(25),可以得到基于目标位置参数的似然函数:
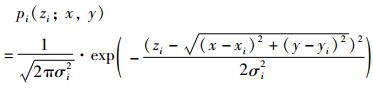
|
(26) |
其中,x和y分别表示未知节点的真实横坐标和纵坐标,xi和yi分别表示第个锚节点的横坐标和纵坐标,zi表示第i个锚节点与未知节点之间的距离测量值,σi表示第i个锚节点与未知节点之间测量噪声的标准差。由于每个锚节点与未知节点之间的测量值是相互独立的,因此可以构建联合似然函数:
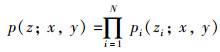
|
(27) |
只需求解使得式(27)最大的x=(x,y),即

|
(28) |
同理,如果测量处于NLOS环境中,根据NLOS误差的不同分布,可分别得到在不同分布下的似然函数。
当NLOS误差服从指数分布时:
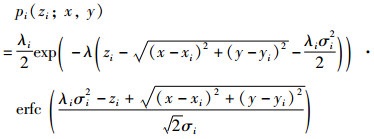
|
(29) |
其中,λi为指数分布的参数,erfc为互补误差函数。
当NLOS服从均匀分布时:

|
(30) |
其中,ai和bi为均匀分布的参数。
当NLOS为常数时:
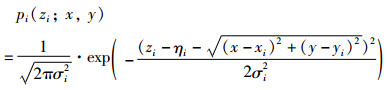
|
(31) |
其中,ηi为一个常数。
目前所提出的定位算法通常将最大似然估计和各种方法组合在一起以提升定位精度和速度。其中,基于双向交换时间戳的无线传感器网络联合同步定位方法,引入了极大似然估计器,然后通过半定规划的方法,将非凸问题转化为凸优化问题[97]。为了解决定位中NLOS因素降低定位精度的问题,Cheng还提出了一种新的算法,即将锚节点分成若干组,通过最大似然估计获得每组目标节点的位置信息,然后通过NLOS识别算法,将包含NLOS误差的测量丢弃,然后结合概率和位置估计来获得目标位置。
此外,针对锚节点相对固定,但是位置未知的异步无线传感器网络,Wang提出了一种基于TDOA的联合同步定位算法,该算法分三步估计内部时钟参数和锚的位置,分别是基于TDOA的相对时钟偏斜的最小二乘估计、基于偏飞行时间的最大似然估计和相对时钟偏移的最小二乘估计,并通过克拉美罗下界验证了算法的卓越性能[98]。
5 无线传感器网络的热点问题在本节中,列举了两大热点问题,分别是基于NLOS误差补偿的定位问题和基于多传感器融合的定位问题。
5.1 基于NLOS误差补偿的定位问题在无线传感器网络定位中,在不同的定位技术以及测量方式下,均难以避免NLOS误差问题。到目前为止,人们对NLOS误差的抑制进行了广泛的研究,并提出了不同的方法,其中NLOS误差模型的构建在误差补偿中起着重要的作用。在不同的环境下,其特征往往各不相同。NLOS误差模型主要从数值特征与统计特征两个方面来构建。
5.1.1 基于数值特征的NLOS误差补偿非视距误差通常是由障碍物或者多径效应等因素产生,会导致行程增加,从而导致测量值出现明显的偏移。对于RSSI模型而言,在NLOS环境下,会加快信号的衰减,通过式(3)计算则会导致所得的距离值大于真实距离值。对于TOA模型而言,无线信号在穿越障碍物时的速度会小于在真空中的速度,从而会导致信号到达时间增加,通过式(8)计算同样会导致所得的距离值大于真实值。因此,NLOS误差通常为正值。
对于处理NLOS误差的一种较为简便的方法即为识别NLOS状态并丢弃含有NLOS误差的测量值。其中,田昕等提出了基于TOA测距下的改进EKF算法[99]。这种算法采用预测与测量比较阈值以及误差分析结合的方法完成了NLOS状态的辨识,然后将包含NLOS误差的测量抛弃,使用剩下的测量值实现目标的定位。这种方法在存在NLOS误差的测量值较少的情况下,定位效果较好,但是在部分定位环境中,绝大多数测量都存在NLOS误差,此时会导致可用测量值有限,从而无法保证定位精度。
除了识别并丢弃NLOS测量的方法外,对NLOS的识别和估计是另一种更为常见并有效的方法。例如,Wang提出了两种凸松弛方法,分别是半定松弛和二阶锥松弛方法[100],其中,对NLOS状态信息是已知和未知两种情况,分别进行了讨论。Chen提出了一种非凸的鲁棒加权最小二乘方法来实现多个目标节点的定位问题,并且将该问题转化成了混合半定和二阶锥规划问题[101]。除了在TOA方法下的NLOS误差的估计问题,在RSS方法下同样有一定的研究。例如,Tian提出了基于半定松弛和扩展卡尔曼滤波融合的定位算法,并在TOA和RSS方法下分别进行了讨论。这些方法并不要求已知NLOS误差的统计特征,因此其具有更为宽松的约束[102]。
5.1.2 基于统计特征的NLOS误差补偿基于统计特征的NLOS误差补偿方法是另一种常用的处理方法。这种方法通常假设NLOS误差服从某一种确定性分布,并根据该分布的特征对NLOS误差进行估计,从而对该误差实施相应的补偿。根据NLOS误差的特征,通常其均值大于0,其方差的大小通常根据实际环境给定或者通过算法估计获得。
一般来说,NLOS误差是否存在与定位环境有着必然的联系,其中,被测目标与锚节点之间的距离大小与是否存在NLOS误差有着较大的相关性。经过多次研究和实验验证表明,当被测目标与锚节点之间的距离很小时,NLOS误差出现的可能性较小。当被测目标与锚节点之间的距离增大时,其NLOS误差出现的概率会逐渐增大。Shi根据这一特征,提出了一种考虑NLOS发生概率的极大似然估计定位算法[103]。这种算法考虑了NLOS误差的4种分布情况。在此基础上,Tian额外考虑了角度与NLOS发生概率的关系,提出了一种基于距离和角度概率模型的非视距环境优化算法[104]。此外,Cheng提出了一种改进的联合概率数据关联定位算法,这种算法通过对测量值分组来获得一系列的虚拟点,并根据虚拟点的分类分别使用扩展卡尔曼滤波和改进的联合概率数据关联算法进行定位[105]。这些算法对NLOS状态出现的概率以及其误差值分布概率进行了假设,根据其假设的不同,所提出的算法适用于不同的实际环境。
5.2 多传感器融合的定位问题为了提高无线传感器网络下目标的定位精度,部分研究者展开了多传感器融合定位的相关研究[106]。在早期的研究中,Evennou利用路由器构成无线传感器网络,通过各个路由器的Wi-Fi信号强度和固定于目标处的加速度传感器、陀螺仪、大气压传感器等数据进行融合定位,其中,气压传感器用于对目标进行楼层检测,加速度传感器与陀螺仪用于对目标的步长和运动方向进行估计[9]。首先,使用Wi-Fi信号强度计算初始位置估计,而后使用粒子滤波对多传感器数据进行融合。
基于多传感器数据融合的无线网络定位系统,通常考虑两种因素:
第一种是由于室内的人或物体的移动等环境变化,以及无线传感器自身信号波动或相互干扰等因素,会造成路径损耗因子的变化,而且受到多径效应的影响,使无线传感器网络的定位精度降低。可借助不受上述干扰影响的传感器,例如方向传感器、磁场传感器、加速度传感器、陀螺仪和气压计等。这种多传感器融合的方法在超声波[107]、UWB[108]和Wi-Fi[109]等网络均有应用。
另一种是姿态状态估计的因素。使用无线传感器网络定位,通常无法获取被定位目标的姿态变化,例如转向、迈步等。因此通常考虑多传感器融合来分析被定位目标的运动状态。在利用多传感器对于行人的定位的相关研究中,通常要求被定位目标佩戴额外的传感器,例如固定于皮带中,捆绑于腿上或者直接手持等[110]。近年来,由于智能手机功能的多元化,其已经拥有了Wi-Fi、加速度计、陀螺仪、气压计、电力罗盘等硬件集成。基于手机的便捷性,可以将其内置的传感器应用于传感器网络的信息融合[111]。
随着传感器技术的发展,将会有更多的传感器和信息融合技术被应用于定位系统中以提升系统精度。
6 应用面临的挑战随着现代信息科学和技术的发展,无线传感器网络的应用软件、系统硬件、协议固件、芯片性能等不断更新迭代。对基于无线传感器网络的高精度定位需求提供了有益的依据。从需求上来看,无论是在消费级市场,还是在企业级市场,都对基于高精度位置服务有着迫切的需求。从技术角度来看,目前基于无线传感器网络的定位技术可选方案较多,不同的技术方案适用于不同的场景需求,但是在实践中,多种方案仍然存在着较多不完善的机制,从而可能导致在定位过程中出现较大偏差、甚至发散等不稳定情况。因此基于无线传感器网络的定位系统的环境适应性、具有普适性的技术架构等方面还存在着诸多的挑战。
6.1 多径效应和测量噪声多径效应和噪声是影响定位精度最重要的因素之一。由于信号的固有性质,它们可能会受墙壁、金属甚至行人的干扰,这会对信号的测量造成较大的影响。例如RSS、TOA、TDOA、AOA这些测量方法都是依赖于锚节点和被测节点之间的通信信息来估计目标位置的。在多径效应和噪声的干扰下,接收机针对同一段发射信息,可能会接收到不同的相位延迟以及不同功率衰减的信号,这使得无线信号发射机与接收机之间的实际距离的准确估计具有极大的挑战性,从而对定位精度产生较大影响。为了获得精确的位置估计,需要复杂的信号处理技术对存在NLOS效应的信号进行辨识和抑制。虽然近几年已经提出了一些新型的抑制多径效应和噪声的算法,但是这些算法往往都是在一些特定环境下适用的,其难以在大规模的环境下稳定运行。对于运算复杂度高的算法,需要具有更高处理能力的运算系统提供支持,这无疑会增加系统的部署成本。因此,如何针对当前的算法进行优化,使得其既具有理想的定位精度,又有较小的运算复杂度,是我们当前所需要考虑的重要问题。为了应对此问题,采用分布式网络运算可能是未来有效的攻克方向。
6.2 能源利用效率基于无线传感器网络定位的能源利用效率是另一个需要考量的重要因素。截至目前,大多数的定位系统通常为了追求更高的定位精度而忽略了能耗问题,此类系统经常会以更高的能耗作为代价。在一些特定的环境下,无线传感器通常难以更换电池设备,因此在有限的电源供给下,要求既能够保证高精度和高实时性的定位性能,又要保证其足够的工作时间是非常具有挑战性的。目前,很多系统为了保证定位精度,需要节点时刻发送和监听特定的信号,这会加速电池能源的损耗。因此,在未来的研究过程中,仍需考虑对能耗的优化,例如,可将信号传输至云端进行复杂算法的处理,此外,也应该从硬件构造以及电池构造等方面考虑,最大程度上提升设备的运行时间,提高运行效率。所以,采用更为高效且复杂度更低的噪声抑制和定位算法仍然是未来的研究热点,如何合理利用可再生能源从而提升定位系统运行时间的工作也成为了提升能源利用效率的重要支柱。
6.3 隐私和安全此外,定位服务的隐私和安全性也是不容忽略的一点。位置信息属于用户的敏感信息,对于位置信息的泄露,尤其是涉密人员位置信息的泄露,可能会导致不可估量的后果[112]。随着连接设备数量的增长,定位系统的安全风险也相应增加。该系统的漏洞可能存在于不同的部分,包括Web界面、网络服务、后端系统、软件,甚至硬件等。定位系统在未来会覆盖许多异构实体、服务和网络,这使得直接应用现有的安全架构或标准十分困难。因此,这些具有敏感数据的连接设备需要在系统内采取安全措施。从用户的角度来看,由于许多应用程序包含用户的个人数据,不安全的系统不仅会引起用户的担忧,从而会降低他们使用该系统的意愿,而且,在一些情况下可能会导致严重的问题。例如,在非工作场合,对员工的位置跟踪是一件严重侵犯用户隐私的行为,由此可能会造成很多的隐患。关于隐私和安全问题,研究人员提出了一些潜在的解决方案,例如在硬件级别增加计算机辅助设计;将嵌入式设备分组至VPN(virtual private network)网络中进行碎片管理,仅将必要信息传输至对应的服务端;设计专用加密协议,确保数据传输的过程中不被窃听。然而,这些解决方案仍未达到理想的效果。总体而言,对系统权限加以限制,仅允许服务方访问其专属服务范围的必要数据是未来的发展趋势。这需要在各个方向上继续深入研究,包括但不限于密码算法、通信保护以及硬件更新设计等。
目前的挑战和可能的解决途径的总结如表 5所示。
| 挑战 | 描述 | 可能的解决途径 |
| 多径效应和测量噪声 | 复杂的环境和障碍物会对信号造成严重干扰,从而会影响定位系统的性能 | 提出全新的算法或对现有算法进行改进,以保证普遍场合下定位的准确性,同时最大程度减小运算复杂度,例如考虑分布式网络运算 |
| 能源利用效率 | 高精度定位系统为了保证其准确性与实时性,通常会以高频率完成信号的发射与监听,会消耗大量的能源 | 考虑运算复杂度低且节能的算法,或将复杂的运算迁移至云平台来实现,同时可优化硬件设计以减小能源的消耗 |
| 隐私和安全 | 目前定位系统的隐私和安全保护机制尚不完善,在实现定位的同时,难以保护用户的隐私以及数据安全性 | 定位系统应该建立隐私和安全保护机制,应用加密等技术手段保证用户定位信息安全,并严控授权的权限,保证位置服务商在其功能范围内获得有限的授权 |
| [1] | Akyildiz I F, Su W, Sankarasubramaniam Y, et al. Wireless sensor networks: A survey[J]. Computer Networks, 2002, 38(4): 393–422. DOI:10.1016/S1389-1286(01)00302-4 |
| [2] | Atzori L, Iera A, Morabito G. The internet of things: A survey[J]. Computer Networks, 2010, 54(15): 2787–2805. DOI:10.1016/j.comnet.2010.05.010 |
| [3] | Yick J, Mukherjee B, Ghosal D. Wireless sensor network survey[J]. Computer Networks, 2008, 52(12): 2292–2330. DOI:10.1016/j.comnet.2008.04.002 |
| [4] | Younis O, Fahmy S. Heed: A hybrid, energy-efficient, distributed clustering approach for ad hoc sensor networks[J]. IEEE Transactions on Mobile Computing, 2004, 3(4): 366–379. DOI:10.1109/TMC.2004.41 |
| [5] | Yucek T, Arslan H. A survey of spectrum sensing algorithms for cognitive radio applications[J]. IEEE Communications Surveys & Tutorials, 2009, 11(1): 116–130. |
| [6] |
卢先领, 夏文瑞.
基于最大似然估计的加权质心定位算法[J]. 信息与控制, 2016, 45(5): 582–587.
Lu X L, Xia W R. Weighted centroid localization algorithm based on maximum likelihood estimation[J]. Information and Control, 2016, 45(5): 582–587. |
| [7] |
董云玲. 无线传感器网络节点定位优化算法研究[D]. 石家庄: 河北师范大学, 2021. Dong Y L. Research on node localization optimization algorithm in wireless sensor networks[D]. Shijiazhuang: Hebei Normal University, 2021. |
| [8] | Win M Z, Conti A, Mazuelas S, et al. Network localization and navigation via cooperation[J]. IEEE Communications Magazine, 2011, 49(5): 56–62. DOI:10.1109/MCOM.2011.5762798 |
| [9] | Evennou F, Marx F. Advanced integration of WiFi and inertial navigation systems for indoor mobile positioning[J]. EURASIP Journal on Advances in Signal Processing, 2006. DOI:10.1155/asp/2006/86706 |
| [10] | Dardari D, Closas P, Djuri P M. Indoor tracking: Theory, methods, and technologies[J]. IEEE Transactions on Vehicular Technology, 2015, 64(4): 1263–1278. DOI:10.1109/TVT.2015.2403868 |
| [11] | Bahr A, Leonard J J, Fallon M F. Cooperative localization for autonomous underwater vehicles[J]. The International Journal of Robotics Research, 2009, 28(6): 714–728. DOI:10.1177/0278364908100561 |
| [12] | Yassin A, Nasser Y, Awad M, et al. Recent advances in indoor localization: A survey on theoretical approaches and applications[J]. IEEE Communications Surveys & Tutorials, 2016, 19(2): 1327–1346. |
| [13] |
薛伟莲, 赵娣, 张颖超.
室内定位研究综述[J]. 计算机与现代化, 2020(5): 80–88.
Xue W L, Zhao D, Zhang Y C. Review of research on indoor positioning[J]. Computer and Modernization, 2020(5): 80–88. DOI:10.3969/j.issn.1006-2475.2020.05.014 |
| [14] |
孙大洋, 章荣炜, 李赞.
室内定位技术综述[J]. 无人系统技术, 2020, 3(3): 32–46.
Sun D Y, Zhang R Z, Li Z. Survey of indoor localization[J]. Unmanned Systems Technology, 2020, 3(3): 32–46. |
| [15] | Wu Z H, Han Y, Chen Y, et al. A time-reversal paradigm for indoor positioning system[J]. IEEE Transactions on Vehicular Technology, 2015, 64(4): 1331–1339. DOI:10.1109/TVT.2015.2397437 |
| [16] | Yang C, Nguyen T, Blasch E. Mobile positioning via fusion of mixed signals of opportunity[J]. IEEE Aerospace and Electronic Systems Magazine, 2014, 29(4): 34–46. DOI:10.1109/MAES.2013.130105 |
| [17] | Abumansoor O, Boukerche A. A secure cooperative approach for non-line-of-sight location verification in vanet[J]. IEEE Transactions on Vehicular Technology, 2011, 61(1): 275–285. |
| [18] | Rahman M S, Park Y, Kim K D. RSS-based indoor localization algorithm for wireless sensor network using generalized regression neural network[J]. Arabian Journal for Science and Engineering, 2012, 37(4): 1043–1053. DOI:10.1007/s13369-012-0218-1 |
| [19] | Yuan W, Wu N, Etzlinger B, et al. Cooperative joint localization and clock synchronization based on gaussian message passing in asynchronous wireless networks[J]. IEEE Transactions on Vehicular Technology, 2016, 65(9): 7258–7273. DOI:10.1109/TVT.2016.2518185 |
| [20] | Li W, Jia Y, Du J, et al. Distributed multiple-model estimation for simultaneous localization and tracking with NLOS mitigation[J]. IEEE Transactions on Vehicular Technology, 2013, 62(6): 2824–2830. DOI:10.1109/TVT.2013.2247073 |
| [21] | Niculescu D, Nath B. Ad hoc positioning system(aps)[C]//IEEE Global Telecommunications Conference. Piscataway, USA: IEEE, 2001: 2926-2931. |
| [22] | Patwari N, Hero A O, Perkins M, et al. Relative location estimation in wireless sensor networks[J]. IEEE Transactions on Signal Processing, 2003, 51(8): 2137–2148. DOI:10.1109/TSP.2003.814469 |
| [23] | Vossiek M, Wiebking L, Gulden P, et al. Wireless local positioning[J]. IEEE Microwave Magazine, 2003, 4(4): 77–86. DOI:10.1109/MMW.2003.1266069 |
| [24] | Wong S Y, Lim J G, Rao S, et al. Density-aware hop-count localization (DHL) in wireless sensor networks with variable density[C]//IEEE Wireless Communications and Networking Conference. Piscataway, USA: IEEE, 2005: 1848-1853. |
| [25] | Wang Y, Wang X, Wang D, et al. Range-free localization using expected hop progress in wireless sensor networks[J]. IEEE Transactions on Parallel and Distributed Systems, 2008, 20(10): 1540–1552. |
| [26] | Zhang S, Cao J, Li J C, et al. Accurate and energy-efficient range-free localization for mobile sensor networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(6): 897–910. DOI:10.1109/TMC.2010.39 |
| [27] | Gui L, Val T, Wei A, et al. Improvement of range-free localization technology by a novel DV-hop protocol in wireless sensor networks[J]. Ad Hoc Networks, 2015, 24: 55–73. DOI:10.1016/j.adhoc.2014.07.025 |
| [28] | Wu G, Wang S, Wang B, et al. A novel range-free localization based on regulated neighborhood distance for wireless ad hoc and sensor networks[J]. Computer Networks, 2012, 56(16): 3581–3593. DOI:10.1016/j.comnet.2012.07.007 |
| [29] | Pak J M, Ahn C K, Shi P, et al. Distributed hybrid particle/FIR filtering for mitigating NLOS effects in TOA-based localization using wireless sensor networks[J]. IEEE Transactions on Industrial Electronics, 2016, 64(6): 5182–5191. |
| [30] | Chen H, Liu B, Huang P, et al. Mobility-assisted node localization based on toa measurements without time synchronization in wireless sensor networks[J]. Mobile Networks and Applications, 2012, 17(1): 90–99. DOI:10.1007/s11036-010-0281-3 |
| [31] | Yu K, Guo Y J, Hedley M. Toa-based distributed localisation with unknown internal delays and clock frequency offsets in wireless sensor networks[J]. IET Signal Processing, 2009, 3(2): 106–118. DOI:10.1049/iet-spr:20080029 |
| [32] | Xu B, Sun G, Yu R, et al. High-accuracy TDOA-based localization without time synchronization[J]. IEEE Transactions on Parallel and Distributed Systems, 2012, 24(8): 1567–1576. |
| [33] | Gholami M R, Gezici S, Strom E G. TDOA based positioning in the presence of unknown clock skew[J]. IEEE Transactions on Communications, 2013, 61(6): 2522–2534. DOI:10.1109/TCOMM.2013.032013.120381 |
| [34] | Zhang R, Höflinger F, Reindl L. TDOA-based localization using interacting multiple model estimator and ultrasonic transmitter/receiver[J]. IEEE Transactions on Instrumentation and Measurement, 2013, 62(8): 2205–2214. DOI:10.1109/TIM.2013.2256713 |
| [35] | Weng Y, Xiao W, Xie L. Total least squares method for robust source localization in sensor networks using TDOA measurements[J]. International Journal of Distributed Sensor Networks, 2011. DOI:10.1155/2011/172902 |
| [36] | Tomic S, Beko M, Dinis R. Distributed RSS-AoA based localization with unknown transmit powers[J]. IEEE Wireless Communications Letters, 2016, 5(4): 392–395. DOI:10.1109/LWC.2016.2567394 |
| [37] | Boushaba M, Hafid A, Benslimane A. High accuracy localization method using AoA in sensor networks[J]. Computer Networks, 2009, 53(18): 3076–3088. DOI:10.1016/j.comnet.2009.07.015 |
| [38] | Fascista A, Ciccarese G, Coluccia A, et al. A localization algorithm based on V2I communications and AOA estimation[J]. IEEE Signal Processing Letters, 2016, 24(1): 126–130. |
| [39] | Tomic S, Beko M, Dinis R. RSS-based localization in wireless sensor networks using convex relaxation: Noncooperative and cooperative schemes[J]. IEEE Transactions on Vehicular Technology, 2014, 64(5): 2037–2050. |
| [40] | Gholami M R, Vaghefi R M, Ström E G. RSS-based sensor localization in the presence of unknown channel parameters[J]. IEEE Transactions on Signal Processing, 2013, 61(15): 3752–3759. DOI:10.1109/TSP.2013.2260330 |
| [41] | Venkatraman S, Caffery J, You H R. A novel ToA location algorithm using LoS range estimation for NLoS environments[J]. IEEE Transactions on Vehicular Technology, 2004, 53(5): 1515–1524. DOI:10.1109/TVT.2004.832384 |
| [42] | Zhang S, Jiang H, Yang K. Detection and localization for an unknown emitter using TDOA measurements and sparsity of received signals in a synchronized wireless sensor network[C]//IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway, USA: IEEE, 2013: 5146-5149. |
| [43] | Zheng Y, Sheng M, Liu J, et al. Exploiting AoA estimation accuracy for indoor localization: A weighted AoA-based approach[J]. IEEE Wireless Communications Letters, 2018, 8(1): 65–68. |
| [44] | Şekerciogǧlu Y A, Violi J, Priestnall L, et al. Accurate node localization with directional pulsed infrared light for indoor ad hoc network applications[C]//22nd International Conference on Telecommunications. Piscataway, USA: IEEE, 2015: 384-390. |
| [45] | Arbula D, Ljubic S. Indoor localization based on infrared angle of arrival sensor network[J]. Sensors, 2020, 20(21): 6278. DOI:10.3390/s20216278 |
| [46] | Flores S, Geis J, Vossiek M. An ultrasonic sensor network for high-quality range-bearing-based indoor positioning[C]//2016 IEEE/ION Position, Location and Navigation Symposium. Piscataway, USA: IEEE, 2016: 572-576. |
| [47] | De Angelis A, Moschitta A, Comuniello A. TDoA based positioning using ultrasound signals and wireless nodes[C]//2017 IEEE International Instrumentation and Measurement Technology Conference. Piscataway, USA: IEEE, 2017: 1-6. |
| [48] | De Angelis A, Moschitta A, Carbone P, et al. Design and characterization of a portable ultrasonic indoor 3-D positioning system[J]. IEEE Transactions on Instrumentation and Measurement, 2015, 64(10): 2616–2625. DOI:10.1109/TIM.2015.2427892 |
| [49] | Khyam M O, Xinde L, Ge S S, et al. Multiple access chirp-based ultrasonic positioning[J]. IEEE Transactions on Instrumentation and Measurement, 2017, 66(12): 3126–3137. DOI:10.1109/TIM.2017.2737898 |
| [50] | Paredes J A, álvarez F J, Aguilera T, et al. 3D indoor positioning of UAVs with spread spectrum ultrasound and time-of-flight cameras[J]. Sensors, 2018, 18(1): 89. |
| [51] | Mackey A, Spachos P. Performance evaluation of beacons for indoor localization in smart buildings[C]//2017 IEEE Global Conference on Signal and Information Processing. Piscataway, USA: IEEE, 2017: 823-827. |
| [52] | Jia M, Komeily A, Wang Y, et al. Adopting internet of things for the development of smart buildings: A review of enabling technologies and applications[J]. Automation in Construction, 2019, 101: 111–126. DOI:10.1016/j.autcon.2019.01.023 |
| [53] | Ni Y, Liu J, Liu S, et al. An indoor pedestrian positioning method using HMM with a fuzzy pattern recognition algorithm in a WLAN fingerprint system[J]. Sensors, 2016, 16(9): 1447. DOI:10.3390/s16091447 |
| [54] | Wang S S. A BLE-based pedestrian navigation system for car searching in indoor parking garages[J]. Sensors, 2018, 18(5): 1442. DOI:10.3390/s18051442 |
| [55] | Mokhtari G, Anvari-Moghaddam A, Zhang Q, et al. Multi-residential activity labelling in smart homes with wearable tags using BLE technology[J]. Sensors, 2018, 18(3): 908. DOI:10.3390/s18030908 |
| [56] | Lee K, Nam Y, Min S D. An indoor localization solution using Bluetooth RSSI and multiple sensors on a smartphone[J]. Multimedia Tools and Applications, 2018, 77(10): 12635–12654. DOI:10.1007/s11042-017-4908-2 |
| [57] | Kolakowski M. Improving accuracy and reliability of bluetooth low-energy-based localization systems using proximity sensors[J]. Applied Sciences, 2019, 9(19): 4081. DOI:10.3390/app9194081 |
| [58] | Li H, Trocan M, Galayko D. Virtual fingerprint and two-way ranging-based Bluetooth 3D indoor positioning with RSSI difference and distance ratio[J]. Journal of Electromagnetic Waves and Applications, 2019, 33(16): 2155–2174. DOI:10.1080/09205071.2019.1667268 |
| [59] | Malekzadeh P, Salimibeni M, Atashi M, et al. Gaussian mixture-based indoor localization via bluetooth low energy sensors[C]//2019 IEEE SENSORS. Piscataway, USA: IEEE, 2019: 1-4. |
| [60] |
曹子腾, 郭阳, 赵正旭.
室内定位技术研究综述[J]. 计算机技术与发展, 2020, 30(6): 202–206.
Cao Z T, Guo Y, Zhao Z X. Survey of indoor positioning[J]. Computer Technology and Development, 2020, 30(6): 202–206. DOI:10.3969/j.issn.1673-629X.2020.06.039 |
| [61] |
李兵兵. 基于WIFI位置指纹的室内定位算法研究[D]. 石家庄: 河北大学, 2020. Li B B. Research on indoor positioning algorithm based on WiFi position fingerprint[D]. Shijiazhuang: Hebei University, 2020. |
| [62] | Youssef M, Agrawala A. The Horus WLAN location determination system[C]//3rd International Conference on Mobile Systems, Applications, and Services. Piscataway, USA: IEEE, 2005: 205-218. |
| [63] | Wang X, Gao L, Mao S, et al. CSI-based fingerprinting for indoor localization: A deep learning approach[J]. IEEE Transactions on Vehicular Technology, 2016, 66(1): 763–776. |
| [64] | Lee E K, Oh S Y, Gerla M. RFID assisted vehicle positioning in VANETs[J]. Pervasive and Mobile Computing, 2012, 8(2): 167–179. DOI:10.1016/j.pmcj.2011.06.001 |
| [65] | Cheng S, Wang S, Guan W, et al. 3DLRA: An RFID 3D indoor localization method based on deep learning[J]. Sensors, 2020, 20(9): 2731. DOI:10.3390/s20092731 |
| [66] | Higaki M, Tsutsumi Y. 3D indoor localization of RFID tags with phased array and deep neural network[C]//2020 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting. Piscataway, USA: IEEE, 2020: 1005-1006. |
| [67] | Wang Z, Xu M, Ye N, et al. Computer vision-assisted 3d object localization via COTS RFID devices and a monocular camera[J]. IEEE Transactions on Mobile Computing, 2021. DOI:10.1109/TMC.2019.2954830 |
| [68] | Bianchi V, Ciampolini P, De Munari I. RSSI-based indoor localization and identification for ZigBee wireless sensor networks in smart homes[J]. IEEE Transactions on Instrumentation and Measurement, 2018, 68(2): 566–575. |
| [69] | Loganathan A, Ahmad N S, Goh P. Self-adaptive filtering approach for improved indoor localization of a mobile node with ZigBee-based RSSI and odometry[J]. Sensors, 2019, 19(21): 4748. DOI:10.3390/s19214748 |
| [70] | Han Z, Mingxia C, Shunyan L. Research on node location algorithm of ZigBee based on optimized neural network[C]//2020 International Conference on Computer Engineering and Application. Piscataway, USA: IEEE, 2020: 693-698. |
| [71] |
万瑜, 邱迎龙, 何小鹏.
基于UWB的物体定位模块的研究与设计[J]. 物联网技术, 2021, 11(5): 21–22.
Wan Y, Qiu Y L, He X P. Research and design of object positioning module based on UWB[J]. Internet of Things Technologies, 2021, 11(5): 21–22. |
| [72] | Fan Q, Sun B, Sun Y, et al. Performance enhancement of MEMS-based INS/UWB integration for indoor navigation applications[J]. IEEE Sensors Journal, 2017, 17(10): 3116–3130. DOI:10.1109/JSEN.2017.2689802 |
| [73] |
周军, 魏国亮, 田昕, 等.
融合UWB和IMU数据的新型室内定位算法[J]. 小型微型计算机系统, 2021, 42(8): 1741–1746.
Zhou J, Wei G L, Tian X, et al. Novel indoor positioning algorithm by fusing data of UWB and IMU[J]. Journal of Chinese Computer Systems, 2021, 42(8): 1741–1746. DOI:10.3969/j.issn.1000-1220.2021.08.027 |
| [74] | Wang T, Hu K, Li Z, et al. A semi-supervised learning approach for UWB ranging error mitigation[J]. IEEE Wireless Communications Letters, 2020. DOI:10.1109/LWC.2020.3046531 |
| [75] | Kaltiokallio O J, Hostettler R, Patwari N. A novel Bayesian filter for RSS-based device-free localization and tracking[J]. IEEE Transactions on Mobile Computing, 2019. DOI:10.1109/TMC.2019.2953474 |
| [76] | Talvitie J, Renfors M, Lohan E S. Distance-based interpolation and extrapolation methods for RSS-based localization with indoor wireless signals[J]. IEEE Transactions on Vehicular Technology, 2015, 64(4): 1340–1353. DOI:10.1109/TVT.2015.2397598 |
| [77] | Liu C, Fang D, Yang Z, et al. RSS distribution-based passive localization and its application in sensor networks[J]. IEEE Transactions on Wireless Communications, 2015, 15(4): 2883–2895. |
| [78] | Xiong W, So H C. TOA-based localization with NLOS mitigation via robust multidimensional similarity analysis[J]. IEEE Signal Processing Letters, 2019, 26(9): 1334–1338. DOI:10.1109/LSP.2019.2929860 |
| [79] | Katwe M, Ghare P, Sharma P K, et al. NLOS error mitigation in hybrid RSS-TOA-based localization through semi-definite relaxation[J]. IEEE Communications Letters, 2020, 24(12): 2761–2765. DOI:10.1109/LCOMM.2020.3020948 |
| [80] | Zhang H, Qi X, Wei Q, et al. TOA NLOS mitigation cooperative localisation algorithm based on topological unit[J]. IET Signal Processing, 2021, 14(10): 765–773. |
| [81] | Xiong H, Peng M, Gong S, et al. A novel hybrid RSS and TOA positioning algorithm for multi-objective cooperative wireless sensor networks[J]. IEEE Sensors Journal, 2018, 18(22): 9343–9351. DOI:10.1109/JSEN.2018.2869762 |
| [82] | Dai Z, Wang G, Jin X, et al. Nearly optimal sensor selection for TDOA-based source localization in wireless sensor networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 12031–12042. DOI:10.1109/TVT.2020.3011118 |
| [83] | Li Z, Zhao Y, Cheng N, et al. Multiobjective optimization based sensor selection for TDOA tracking in wireless sensor network[J]. IEEE Transactions on Vehicular Technology, 2019, 68(12): 12360–12374. DOI:10.1109/TVT.2019.2949235 |
| [84] | Zou Y, Liu H. TDOA localization with unknown signal propagation speed and sensor position errors[J]. IEEE Communications Letters, 2020, 24(5): 1024–1027. DOI:10.1109/LCOMM.2020.2968434 |
| [85] | Zou Y, Liu H. Semidefinite programming methods for alleviating clock synchronization bias and sensor position errors in TDOA localization[J]. IEEE Signal Processing Letters, 2020, 27: 241–245. DOI:10.1109/LSP.2020.2965822 |
| [86] | Hamdollahzadeh M, Amiri R, Behnia F. Optimal sensor placement for multi-source AOA localisation with distance-dependent noise model[J]. IET Radar, Sonar & Navigation, 2019, 13(6): 881–891. |
| [87] | Wu K, Ni W, Su T, et al. Exploiting spatial-wideband effect for fast AoA estimation at lens antenna array[J]. IEEE Journal of Selected Topics in Signal Processing, 2019, 13(5): 902–917. DOI:10.1109/JSTSP.2019.2937691 |
| [88] | BniLam N, Joosens D, Aernouts M, et al. LoRay: AoA estimation system for long range communication networks[J]. IEEE Transactions on Wireless Communications, 2020, 20(3): 2005–2018. |
| [89] | Qi H, Mo L, Wu X. SDP relaxation methods for RSS/AOA-based localization in sensor networks[J]. IEEE Access, 2020, 8: 55113–55124. DOI:10.1109/ACCESS.2020.2981639 |
| [90] | Costa M S, Tomic S, Beko M. An SOCP estimator for hybrid RSS and AOA target localization in sensor networks[J]. Sensors, 2021, 21(5): 1731. DOI:10.3390/s21051731 |
| [91] | Wang H, Liang L, Xu J, et al. A quadratic weighted centroid algorithm for tunnel personnel positioning[J]. International Journal of Distributed Sensor Networks, 2020. DOI:10.1177/1550147720917021 |
| [92] | Wang H, Wen Y, Zhao D. Robust positioning algorithm based on relative location map for mobile wireless sensor networks[J]. Journal of Intelligent & Fuzzy Systems, 2017, 32(5): 3695–3710. |
| [93] | Wang W, Liu X, Li M, et al. Optimizing node localization in wireless sensor networks based on received signal strength indicator[J]. IEEE Access, 2019, 7: 73880–73889. DOI:10.1109/ACCESS.2019.2920279 |
| [94] |
张彬, 王永雄, 邵翔, 等.
融合异质传感器信息的机器人精准室内定位[J]. 控制工程, 2018, 25(7): 1335–1343.
Zhang B, Wang Y X, Shao X, et al. Precise robot indoor localization based on information fusion of heterogeneous sensors[J]. Control Engineering of China, 2018, 25(7): 1335–1343. |
| [95] | Pak J M. Switching extended Kalman filter bank for indoor localization using wireless sensor networks[J]. Electronics, 2021, 10(6): 718. DOI:10.3390/electronics10060718 |
| [96] | Ullah I, Qian S, Deng Z, et al. Extended Kalman filter-based localization algorithm by edge computing in wireless sensor networks[J]. Digital Communications and Networks, 2021, 7(2): 187–195. DOI:10.1016/j.dcan.2020.08.002 |
| [97] | Cheng L, Wang Y, Xue M, et al. An indoor robust localization algorithm based on data association technique[J]. Sensors, 2020, 20(22): 6598. DOI:10.3390/s20226598 |
| [98] | Wang T, Xiong H, Ding H, et al. TDOA-based joint synchronization and localization algorithm for asynchronous wireless sensor networks[J]. IEEE Transactions on Communications, 2020, 68(5): 3107–3124. DOI:10.1109/TCOMM.2020.2973961 |
| [99] |
田昕, 魏国亮, 王建华, 等.
NLOS环境下的改进EKF定位算法研究[J]. 控制工程, 2020, 27(5): 909–913.
Tian X, Wei G L, Wang J H, et al. Research on improved EKF localization algorithm in NLOS environment[J]. Control Engineering of China, 2020, 27(5): 909–913. |
| [100] | Wang G, Chen H, Li Y, et al. NLOS error mitigation for TOA-based localization via convex relaxation[J]. IEEE Transactions on Wireless Communications, 2014, 13(8): 4119–4131. DOI:10.1109/TWC.2014.2314640 |
| [101] | Chen H, Wang G, Wu X. Cooperative multiple target nodes localization using TOA in mixed LOS/NLOS environments[J]. IEEE Sensors Journal, 2019, 20(3): 1473–1484. |
| [102] | Tian X, Wei G, Wang L, et al. Wireless-sensor-network-based target localization: A semidefinite relaxation approach with adaptive threshold correction[J]. Neurocomputing, 2020, 405: 229–238. DOI:10.1016/j.neucom.2020.04.046 |
| [103] | Shi X, Mao G, Yang Z, et al. MLE-based localization and performance analysis in probabilistic LOS/NLOS environment[J]. Neurocomputing, 2017, 270: 101–109. DOI:10.1016/j.neucom.2016.11.092 |
| [104] | Tian X, Wei G, Wang J, et al. A localization and tracking approach in NLOS environment based on distance and angle probability model[J]. Sensors, 2019, 19(20): 4438. DOI:10.3390/s19204438 |
| [105] | Cheng L, Li Y, Xue M, et al. An indoor localization algorithm based on modified joint probabilistic data association for wireless sensor network[J]. IEEE Transactions on Industrial Informatics, 2020, 17(1): 63–72. |
| [106] |
赵建国, 王杰贵.
基于PDR反馈的Wi-Fi室内定位算法研究[J]. 计算机应用研究, 2019, 36(1): 215–219.
Zhao J Q, Wang J G. Reseach on Wi-Fi indoor positioning algorithm based on PDR feedback[J]. Application Research of Computers, 2019, 36(1): 215–219. |
| [107] | Dobrev Y, Gulden P, Vossiek M. An indoor positioning system based on wireless range and angle measurements assisted by multi-modal sensor fusion for service robot applications[J]. IEEE Access, 2018, 6: 69036–69052. DOI:10.1109/ACCESS.2018.2879029 |
| [108] | Liu F, Wang J, Zhang J, et al. An indoor localization method for pedestrians base on combined UWB/PDR/Floor map[J]. Sensors, 2019, 19(11): 2578. DOI:10.3390/s19112578 |
| [109] | Song S, Yu H. An indoor multi-source fusion positioning approach based on PDR/MM/WiFi[J]. AEU-International Journal of Electronics and Communications, 2021. DOI:10.1016/j.aeue.2021.153733 |
| [110] |
张殿臣, 魏国亮, 田昕, 等.
NLOS环境下基于粒子滤波的动态更新信道模型定位系统[J]. 小型微型计算机系统, 2019, 40(12): 2608–2613.
Zhang D C, Wei G L, Tian X, et al. Dynamic update channel model location system based on particle filter in NLOS environment[J]. Journal of Chinese Computer Systems, 2019, 40(12): 2608–2613. DOI:10.3969/j.issn.1000-1220.2019.12.025 |
| [111] | Kaji K, Kawaguchi N. Design and implementation of WiFi indoor localization based on Gaussian mixture model and particle filter[C]//International Conference on Indoor Positioning and Indoor Navigation. Piscataway, USA: IEEE, 2012: 1-9. |
| [112] |
王慧强, 高凯旋, 吕宏武.
高精度室内定位研究评述及未来演进展望[J]. 通信学报, 2021, 42(7): 198–210.
Wang H Q, Gao K X, Lü H W. Survey of high-precision localization and the prospect of future evolution[J]. Journal on Communications, 2021, 42(7): 198–210. |