



0 引言
移动机器人已广泛应用于国防科技、生活服务、生产建设等重要领域,如协助完成货物搬运、快递分类等任务,合理的路径规划技术既能提高机器人工作效率又延长使用寿命[1-2]。智能工厂中从仓库向各加工工位配送货物、快递公司从营业点向居民小区不同楼宇派送物件等典型应用场景中应用多个机器人协同作业,极大地提升了任务完成效率。
多移动机器人路径规划问题的核心是规划从起始到完成目标全过程中的无碰撞路径[3],现可分为集中式规划和解耦式规划两大类。其中,集中式规划是将多移动机器人视为一个整体,将各机器人的所有自由度整合成一个多自由度空间,对其进行搜索和规划[4]。文[5]提出一种基于数字孪生的AGV(automated guided vehicle)集中式调度方法,通过物理系统和虚拟系统的数据交互,预测未来的情况,实现动态拣货单情形下的实时调度;文[6]引入合作型协同算法框架,通过带精英策略的非支配排序遗传算法进行多目标优化求解。但采用集中式规划多机器人路径时,需要共享空间,将多机器人的信息传递给一个控制系统,存在配置空间维度高和计算复杂等问题,属于最优路径求解NP难题[7]。解耦式规划是先分别对每个移动机器人规划出一条无碰撞的路径,在执行的过程中,通过调整机器人的速度或者以停车等待的方式来避免各机器人间的碰撞[8],常用路径规划方法有A*算法[9]、粒子群算法[10]、RRT(rapidly-exploring random tree)[11]等。文[12]针对立体仓库中多机器人协同路径规划问题,建立了一个具有最优作业时间和能耗的多目标路径规划模型,在改进的蚁群算法规划初始路径基础上,基于动态优先级冲突消解策略(DPS)方法解决多机器人冲突问题;文[13]在提出改进的免疫协同进化算法基础上,实现基于优先级机制的动态窗口法在相应碰撞位置附近实现路径的局部协调;文[14]使用改进的蚁群算法规划路径,实现根据AGV剩余电量分配优先级来协调避撞;文[15]利用Dijkstra算法规划AGV路径并通过统计路径使用程度对路径进行加权计算,并实现对优先级较低的AGV重新进行路径规划;文[16]在作业避碰层,针对不同的碰撞形式,根据可选节点的数量提出对应的避障规则,提高避障能力;文[17]提出了一种由全局路径规划和基于混合人工鱼群算法的局部路径规划以及扩展逻辑策略组成的方法,同时开发了一种评价函数,提高了路径规划算法的决策能力。但解耦式规划易导致机器人间的相互干涉,分配结果易出现局部最优、分配优先权出现死锁、延长任务完成时间等问题。
针对集中式规划和解耦式规划存在计算复杂度的问题,以及解耦式规划未考虑到局部冲突消解是否会在全局上导致后续产生新冲突的问题,本文面向能耗优化约束,提出能耗优化下基于滚动时间窗和二叉树先序遍历的多移动机器人动态避撞(TW & BT)融合算法,在构建移动机器人作业栅格地图中,根据所建立能耗目标模型基于改进A*算法求得各个机器人在独立作业的初始路径;针对初始规划路径,以停车避撞时产生能耗最小为优化目标,基于滚动时间窗和二叉树协同机制,求得无机器人碰撞且能耗最优的作业规划方案。
1 能耗约束下多机器人路径规划综合移动机器人在作业过程中的总能耗受约于电机效率损失的能量、地面高度差的势能、滚动摩擦阻力消耗的能量、速度变化和转弯消耗的能量等方面因素,构建单个移动机器人能耗模型,基于改进A*算法求得每个移动机器人在独立作业下初始路径。
1.1 构建移动机器人在作业过程中的能耗模型移动机器人在作业过程中从第i-1个节点到第i个节点的能耗实际代价值模型G(i)为

|
(1) |
式中,Ep(i)为移动机器人从第i-1个节点到第i个节点电机恒功率或恒转矩运行消耗的能量;Ev(i)为移动机器人从第i-1个节点到第i个节点行驶高度差造成的能耗;Ef(i)为移动机器人从第i-1个节点到第i个节点摩擦阻力造成的能耗;Ek1(i)为移动机器人从第i-1个节点到第i个节点速度变化造成的能耗;Ek2(i)为移动机器人从第i-1个节点到第i个节点转弯造成的能耗。
Ep(i)的计算公式为
|
(2) |
式中,p为电机功率,S(i)为从第i-1个节点到第i个节点移动的距离,v(i)为移动机器人在第i个节点的速度。
Ev(i)的计算公式为
|
(3) |
式中,m为移动机器人质量,g为重力加速度,Δh(i)为第i-1个节点与第i个节点之间的高度差。
Ef(i)的计算公式为

|
(4) |
式中,μ为地形中地面摩擦系数,θ为凹凸坡度角,其计算公式为
|
(5) |
Ek1(i)计算公式为

|
(6) |
Ek2(i)计算公式为

|
(7) |
式中,I为转动惯量,ω(i)为移动机器人在第i个节点的角速度。
1.2 基于A*算法的多机器人路径规划A*是一种静态路网中求解最短路径最有效的直接搜索方法[18]。其采用启发式函数来寻找距离起点具有最小代价的终点,对于移动机器人在作业过程中的节点n的估计函数的一般形式f(n)为

|
(8) |
式中,g(n)为起始节点到当前节点n的实际代价,h(n)为当前节点n到目标节点的预估代价。
根据式(1),到达当前节点n的能耗实际代价g(n)为
|
(9) |
移动机器人作业中,计算h(n)常用有欧几里得距离、曼哈顿距离、对角线距离等方法[19]。本文利用对角线距离计算当前节点n与目标节点的预估距离D(n),计算公式为

|
(10) |
式中,xn和yn为移动机器人当前节点n横纵坐标,xe和ye为移动机器人目标节点横纵坐标,max为取最大值。
根据式(10),当前节点n到目标节点的预估代价模型h(n)为

|
(11) |
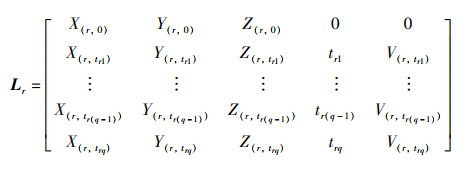
移动机器人的运动轨迹由一系列3维空间栅格节点集合构成,每个栅格节点包含了空间位置、时间和运动速度等信息,反映了移动机器人的运动轨迹中当前的运动行为状态。应用改进A*算法,求解得能耗最低的多移动机器人的初始路径,其中移动机器人r的运动行为的信息矩阵为
|
(12) |
式中,r=1,2,…,代表移动机器人序号;移动机器人的作业时间轴划分为q个时间单元,每个时间单元以tr1为时间单位;X(r,trq)、Y(r,trq)、Z(r,trq)分别表示移动机器人r在作业轴trq时刻的空间坐标位置信息;V(r,trq)表示移动机器人r在作业轴trq时刻的运动速度信息。移动机器人r的起点信息矩阵为[X(r,0),Y(r,0),Z(r,0),0,0]。移动机器人r在作业时间轴上的第1个时间单元的信息矩阵为[X(r,tr1),Y(r,tr1),Z(r,tr1),tr1,V(r,tr1)]。以此类推,移动机器人r在作业时间轴上的第q个时间单元的信息矩阵为[X(r,trq),Y(r,trq),Z(r,trq),trq,V(r,trq)],故移动机器人r的运动行为是(q+1,5)信息矩阵。综合所有移动机器人的运动行为信息矩阵,即得基于A*算法求解所有移动机器人初始规划路径空间矩阵[L1,L2,L3,…]。
2 TW & BT融合算法为了解决多移动机器人系统中碰撞问题,提出能耗优化下基于滚动时间窗和二叉树先序遍历的多移动机器人动态避撞(TW & BT)融合算法,其以避撞停车等待能耗最小为优化目标。
2.1 滚动时间窗(TW)机理时间窗的基本原理是基于时间序列的和基于事件的混合分解策略。多机器人系统中某两个机器人在某一时刻发生碰撞被称为一个触发事件[20]。如图 1所示,先建立事件列表,即满足条件时,对应的事件被触发;然后建立决策列表,与事件列表对应,即满足对应事件时,执行对应的避撞决策。随着时间轴的推移,策略检测每个时间点上是否存在事件列表上的触发事件,若存在,将对应的避撞决策列表拉出执行。规定:每相邻两个触发事件之间的间隔为一个时间窗,其长度等于该相邻两个触发事件所对应的时间点之间的间隔;时间轴起点到第一个触发事件,以及最后一个触发事件到时间轴终点均是一个时间窗。如图 1中所示,第i-1个触发事件和第i个触发事件的间隔表示“时间窗i”。每个时间窗记录该时间段内所有机器人投影到2维平面的路径。

|
| 图 1 滚动时间窗(TW)机理 Fig.1 The theory of rolling time window (TW) |
多移动机器人作业中避撞的停车等待问题属于树形结构的派工问题,其二叉树先序遍历方法的流程图如图 2所示,具体步骤为

|
| 图 2 二叉树先序遍历方法流程图 Fig.2 The flow chart of binary tree traversal |
步骤1 判断时间窗中的当前时间节点是否有某两个移动机器人会在发生碰撞,如果两个移动机器人产生碰撞,执行步骤2;如果两个移动机器人没有产生碰撞,C=C+τ(C为当前节点的时间变量,τ为最小时间单位),进入总流程步骤6(见2.3节)。
步骤2 令二叉树的左子树表示多移动机器人序号靠前的移动机器人在时间窗中的时间变量C-τ(几个最小时间单位根据需求设定)停车完成动态避撞,二叉树的右子树表示多移动机器人序号靠后的移动机器人在时间窗中的时间变量C-τ停车完成动态避撞;应用二叉树先序遍历机理,当前节点指向左子树,更新Z1、N1(Z1、N1为数据存储空矩阵,Z1数据存储矩阵表示储存遍历时的避撞决策情况,N1数据存储矩阵表示储存遍历时避撞决策对应的能耗),C=C+τ,左子树遍历完后进入总流程步骤6(见2.3节)。
步骤3 当前节点指向右子树,更新Z1、N1,C=C+τ,右子树遍历完后进入总流程步骤6(见2.3节)。
2.3 多移动机器人的TW & BT融合算法由图 1可知,在处理触发事件时,如第i-1个时间窗内有两种不同分支情况,而这两种分支情况在后续的滚动时间窗更新中,可能会出现更多的分支情况。为求得最佳避撞决策,提出滚动时间窗(TW)机制与二叉树(BT)先序遍历方法融合协同执行,即TW & BT融合算法,每当遇到触发事件时,相当于只遍历到一个二叉树节点,而每个触发事件的两种决策相当于该节点的左右子树,每个子树的长度等于该避碰决策下此次触发事件到下次触发事件之间的时间窗长度。在遍历完所有的叶子节点后,总能耗最低的那个子树即最优决策。TW & BT融合算法流程图如图 3所示,具体流程为:

|
| 图 3 TW & BT融合算法流程图 Fig.3 The flow chart of TW & BT fusion algorithm |
步骤1 通过改进A*算法规划初始路径矩阵。
步骤2 设立4个数据存储空矩阵,分别记为Z1、N1、Z2、N2,其中Z2数据存储矩阵表示储存遍历完成后的最优避撞决策,N2数据存储矩阵表示储存最优避撞决策对应的能耗。
步骤3 初始化遍历时避撞决策对应的总能耗和时间变量,令遍历时决策对应的总能耗e=+∞,即无穷大,时间变量C=0。
步骤4 以时间变量C的值为根节点开始遍历。
步骤5 二叉树(BT)先序遍历方法为TW & BT融合算法的子模块,调用该子模块。
步骤6 判断该节点是否为二叉树的叶子节点,如果是二叉树的叶子节点,则继续往下执行,否则跳转执行步骤4。
步骤7 累加遍历时各个避撞决策对应的能耗,记为sum(N1)。
步骤8 对比sum(N1)与e,如果小于e,则继续往下执行;否则跳转至步骤10。
步骤9 令e=sum(N1),Z2=Z1,N2=N1。
步骤10 基于滚动时间窗(TW)机制,判断所有时间窗中的时间变量节点是否遍历完成。若遍历完成,则继续往下执行;若遍历未完成,则以未完成的时间窗中的时间变量C为当前节点,跳转至步骤4。
步骤11 获得多移动机器人动态避撞最优路径,TW & BT融合算法结束。
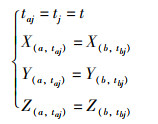
2.4 停车等待时产生能耗目标模型当机器人a与机器人b在t时刻时符合式(13)的条件时会发生碰撞。
|
(13) |
当移动机器人a和b在点(X(a,taj),Y(a,taj),Z(a,taj))或(X(a,tbj),Y((b,tbj),Z((b,tbj))会发生碰撞时,选择机器人a在碰撞前一点(X(a,ta(j-1)),Y(a,ta(j-1)),Z(a,ta(j-1)))或机器人b在碰撞前一点(X(b,tb(j-1)),Y((b,tb(j-1)),Z((b,tb(j-1)))选择停车等待。等待时间按机器人长度决定为1~3个最小时间单位。
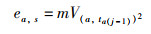
等待所消耗的能量与停车点的速度有关,即停车以及再启动消耗的能量和。若选择移动机器人a停车等待,则消耗的能量ea,s为
|
(14) |
式中,s表示第s次碰撞,m为机器人质量。
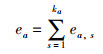
因为移动机器人a在多移动机器人系统中可能会遇到多次碰撞,所以移动机器人a因为停车等待所消耗的能量ea为
|
(15) |
式中,ka为移动机器人a总停车次数。则多移动机器人系统因为停车等待所消耗的能量e总为

|
(16) |
式中,rmax为移动机器人系统中移动机器人的数量。
当以停车等待来解决碰撞时会产生能耗,为获得最低能耗的决策方案,建立式(17)所示的目标模型,其目标函数为最小停车总能耗:

|
(17) |
若选择机器人a选择在点(X(a,ta(j-1)),Y(a,ta(j-1)),Z(a,ta(j-1)))停车等待1个最小时间单位后,机器人a的运动行为信息矩阵La更新为L′a:
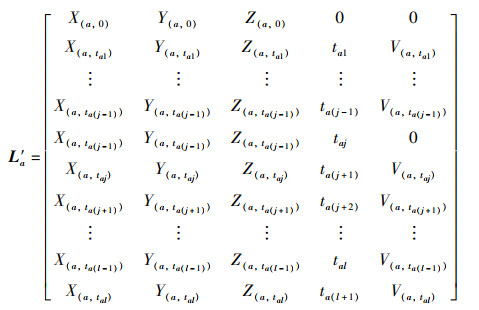
|
(18) |
最后所得的[L′1,L′2,L′3,…]为多机器人系统TW & BT融合算法下最终路径。
3 实验验证为了评价TW & BT融合算法的有效性,构建了大小不同的3维地图和数量不等的移动机器人作业编队进行组合,开展仿真实验验证,并与文[12]所采用的基于动态优先级的冲突消解策略(DPS)方法开展对比实验。文[12]中根据发生冲突时移动机器人与目标点距离设定优先级,与能耗无关,为更有效地对比,本文以冲突时移动机器人停车等待能耗大小设定优先级。对比TW & BT融合算法和DPS方法时,设计3个评价指标:CPU运行时间、目标函数值(e=min e总)及其偏差率。其中,目标函数值的偏差率为
|
(19) |
式中,eTW & BT融合算法表示TW & BT融合算法停车等待消耗的总能量,eDPS方法表示DPS方法停车等待消耗的总能量。
3.1 构建实验3维地图开展算法实验验证,首先需要构建能抽象表达多移动机器人实际作业地图信息的3维虚拟仿真实验环境。本文以栅格法对3维空间进行划分,基于3维地形构造空间笛卡尔直角坐标系O-XYZ。沿OX(横坐标轴)方向对构造空间进行u等分,沿OY(纵坐标轴)方向对构造空间进行d等分,得到u×d个栅格的移动机器人作业平面,OZ(竖坐标轴)方向的值为栅格点的竖坐标,表示为实际地图不同海拔高度值。
完成3维虚拟仿真实验环境构建后,得到栅格点集合P(x,y,z){x=0,1,2,…,u;y=0,1,2,…,d;z=0,0.5,1,1.5,…,l},各个具体数值表示对应实际地图中凹凸地形中最高海拔高度映射到3维虚拟仿真实验环境里的值。其中x、y、z为栅格点对应的序号。本实验构建两类不同大小的3维虚拟仿真实验环境,分别记为环境a和环境b。其中,环境a构建的移动机器人作业平面为64 m×64 m,如图 4(a);环境b构建的移动机器人作业平面为128 m×128 m,如图 4(b)。图 4中,x轴、y轴节点间距为1 m,z轴节点间距为0.5 m,用不同颜色表示地形中的凹凸不平整特性,红色方框表示不可越过障碍的区域。

|
| 图 4 多移动机器人作业的3维虚拟仿真实验环境 Fig.4 The 3D virtual simulation experimental environment for multi-mobile robot |
本验证实验运行平台利用Matlab 2019b进行虚拟仿真,实验运行环境为Win10系统,IntelⓇ CoreTM i5-9300H处理器,8 GB运行内存。
实验中移动机器人相关参数设置如表 1所示。取移动机器人平地移动速度为1 m/s,爬坡速度为0.5 m/s,地表摩擦系数为0.65,重力加速度9.8 m/s2,作业时间单位设置为1 s,停车等待时间为1个最小单位时间。
| 相关参数 | 数值 |
| 移动机器人左右轮距B /cm | 30 |
| 移动机器人前后轴距L /cm | 40 |
| 移动机器人质量m /kg | 9 |
| 移动机器人驱动轮轮胎半径r /cm | 10.75 |
| 电动机效率η | 0.78 |
| 移动机器人电机功率P /W | 200 |
为了有效评价TW & BT融合算法,部分假设条件如下:
1) 不考虑移动机器人停车等待后加速度的时间和位移。
2) 所有移动机器人在构建地图中从左侧至右侧同向行驶,不考虑移动机器人正面碰撞的情况。
3) 所有移动机器人同时出发。
3.3 实验结果分析本验证实验的移动机器人数量设为两种,分别为10(记为编队a)和20(记为编队b)。两类地图和两种编队形成的4中组合情形中,即环境a与编队a组合情形(记为案例1)、环境a与编队b组合情形(记为案例2)、环境b与编队b组合情形(记为案例3)和环境b与编队a组合。其中,因在环境b与编队a组合中移动机器人作业中发生互撞的几率极小,验证实验不考虑该组合情形。
案例1的仿真实验结果分别如图 5所示。

|
| 图 5 案例1仿真实验路径图 Fig.5 The path diagram of simulation experiment in Case 1 |
根据图 5的仿真结果,基于滚动时间窗(TW)机制,构建其滚动时间窗示意图,竖线表示此位置产生碰撞触发事件,根据图 1所示的滚动时间窗(TW)机制,图 6为环境a与编队a组合情形的仿真实验的滚动时间窗示意图,其分解为4个时间窗。其中,时间窗1为在第3 s移动机器人2与移动机器人3发生碰撞,选择移动机器人2停车等待;时间窗2为在第30 s移动机器人5与移动机器人10发生碰,选择移动机器人10停车等待;时间窗3为在第59 s移动机器人4与移动机器人8发生碰撞,选择移动机器人4停车等待;时间窗4为所有移动机器人都到达各自目标点。

|
| 图 6 案例1仿真实验的滚动时间窗示意图 Fig.6 The schematic diagram of rolling time window of simulation experiment in Case 1 |

|
| 图 7 案例2仿真实验路径图 Fig.7 The path diagram of simulation experiment in Case 2 |

|
| 图 8 案例3仿真实验路径图 Fig.8 The path diagram of simulation experiment in Case 3 |
依据图 5、图 7和图 8的仿真实验路径图,TW & BT融合算法和DPS方法的对比实验结果如表 2所示。
| 案例 | CPU运行时间/s | 目标函数值/J | 目标函数值偏差率/% | |||
| DPS方法 | TW & BT融合算法 | DPS方法 | TW & BT融合算法 | |||
| 案例1 | 3.96 | 4.12 | 29.250 0 | 27.000 0 | -7.7 | |
| 案例2 | 17.38 | 17.96 | 32.062 5 | 23.062 5 | -28.1 | |
| 案例3 | 30.23 | 31.37 | 47.063 9 | 31.500 0 | -33.1 | |
根据表 2的对比实验的结果,分析可得出,在案例1、2、3中,两种方法具有相近的计算时间(CPU运行时间);但相对于DPS方法,TW & BT融合算法实现避撞时产生能耗降分别低达7.7%、28.1% 和33.1%。可见,TW & BT融合算法具有较高的鲁棒性及优越性。
4 结语多移动机器人编队的实际作业中,既要考虑能耗优化策略,又要保障有效避撞。本文根据滚动时间窗(TW)机制和二叉树(BT)先序遍历方法的协同策略,提出了TW & BT融合算法。在虚拟仿真实验中,跟踪每个移动机器人的运动行为信息矩阵,并对比已采用的DPS方法,充分验证了TW & BT融合算法鲁棒性及优越性。但应用局限于仿真实验,实物实验中可能存在滚动时间窗(TW)难以精准分割等问题,需要后续进一步深入研究。
| [1] |
王洪斌, 尹鹏衡, 郑维, 等. 基于改进的A*算法与动态窗口法的移动机器人路径规划[J]. 机器人, 2020, 42(3): 346-353. Wang H B, Yin P H, Zheng W, et al. Mobile robot path planning based on improved A* algorithm and dynamic window method[J]. Robot, 2020, 42(3): 346-353. |
| [2] |
岳迪, 范俊岩, 刘强, 等. 基于椭圆动态限制和免疫机理的路径规划算法[J]. 信息与控制, 2022, 51(3): 339-348, 376. Yue D, Fan J Y, Liu Q, et al. Path planning algorithm based on the dynamic restriction of ellipse and immune mechanism[J]. Information and Control, 2022, 51(3): 339-348, 376. |
| [3] |
包翔宇, 曹学鹏, 张弓, 等. 多机器人协同系统的研究综述及发展趋势[J]. 制造技术与机床, 2019(11): 26-30. Bao X Y, Cao X P, Zhang G, et al. Research review and development trend of multi-robot cooperative system[J]. Manufacturing Technology & Machine Tool, 2019(11): 26-30. |
| [4] |
张辰, 周乐来, 李贻斌. 多机器人协同导航技术综述[J]. 无人系统技术, 2020, 3(2): 1-8. Zhang C, Zhou L L, Li Y B. Overview of Multi-robot Collaborative Navigation Technology[J]. Unmanned Systems Technology, 2020, 3(2): 1-8. |
| [5] |
孙阳君, 赵宁. 基于数字孪生的多自动导引小车系统集中式调度[J]. 计算机集成制造系统, 2021, 27(2): 569-584. Sun Y J, Zhao N. Centralized scheduling approach for multi-AGV system based on digital twin[J]. Computer Integrated Manufacturing Systems, 2021, 27(2): 569-584. |
| [6] |
万逸飞, 彭力. 基于协同多目标算法的多机器人路径规划[J]. 信息与控制, 2020, 49(2): 139-146. Wan Y F, Peng L. Multi-robot path planning based on cooperative multi-objective algorithm[J]. Information and Control, 2020, 49(2): 139-146. |
| [7] |
晁永生, 孙文磊. 动态修改路径的多机器人路径规划[J]. 机械科学与技术, 2018, 37(10): 1483-1488. Chao Y S, Sun W L. Dynamic path modification for multi-robot path planning[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(10): 1483-1488. |
| [8] |
曹其新, 黄先群, 朱笑笑, 等. 基于保留区域的分布式多机器人路径规划[J]. 华中科技大学学报(自然科学版), 2018, 46(12): 71-76. Cao Q X, Huang X Q, Zhu X X, et al. Distributed multi-robot path planning based on reserved area[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2018, 46(12): 71-76. |
| [9] |
詹京吴, 黄宜庆. 融合安全A*算法与DWA法的机器人动态避障研究[J/OL]. 计算机工程[2021-12-29].https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=JSJC20211103004&uniplatform=NZKPT&v=g9BjGJf5ZLUKRACC91AL1G0lWG0h4NXNA1-Jfg_y5seoofP_SRXufLzW84ecIcA1. Zhan J W, Huang Y Q. Research on dynamic obstacle avoidance of robot by combing safety A* algorithm and dynamic window approach[J/OL]. Computer Engineering[2021-12-29]. https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=JSJC20211103004&uniplatform=NZKPT&v=g9BjGJf5ZLUKRACC91AL1-G0lWG0h4NXNA1-Jfg_y5seoofP_SRXufLzW84ecIcA1. |
| [10] |
康玉祥, 姜春英, 秦运海, 等. 基于改进PSO算法的机器人路径规划及实验[J]. 机器人, 2020, 42(1): 71-78. Kang Y X, Jiang C Y, Qin Y H, et al. Robot path planning and experiment with an improved PSO algorithm[J]. Robot, 2020, 42(1): 71-78. |
| [11] |
刘亚秋, 赵汉琛, 刘勋, 等. 一种基于改进的快速扩展随机树的工业机器人路径避障规划算法[J]. 信息与控制, 2021, 50(2): 235-246, 256. Liu Y Q, Zhao H C, Liu X, et al. An Improved RRT based obstacle avoidance path planning algorithm for industrial robot[J]. Information and Control, 2021, 50(2): 235-246, 256. |
| [12] |
夏绪辉, 端木艳霞, 郭钰瑶, 等. 立体仓库多机器人协同路径规划与冲突消解[J]. 现代制造工程, 2021(11): 49-57, 16. Xia X H, DuanMu Y X, Guo Y Y, et al. Multi-robot collaborative path planning and conflict resolution in three-dimensional warehouse[J]. Modern Manufacturing Engineering, 2021(11): 49-57, 16. |
| [13] |
钟佩思, 徐东方, 李东民, 等. 基于双层协调体系的多移动机器人路径规划方法[J]. 科学技术与工程, 2020, 20(29): 12000-12006. Zhong P S, Xu D F, Li D M, et al. Path planning for multi-mobile robots in bilevel coordination system[J]. Science Technology and Engineering, 2020, 20(29): 12000-12006. |
| [14] |
Zhang Y, Wang F, Fu F, et al. Multi-AGV path planning for indoor factory by using prioritized planning and improved ant algorithm[J]. Journal of Engineering and Technological Sciences, 2018, 50(4): 534-547. |
| [15] |
姜辰凯, 李智, 盘书宝, 等. 基于改进Dijkstra算法的AGVs无碰撞路径规划[J]. 计算机科学, 2020, 47(8): 272-277. Jiang C K, Li Z, Pan S B, et al. Collision-free path planning of AGVs based on improved Dijkstra algorithm[J]. Computer Science, 2020, 47(8): 272-277. |
| [16] |
夏清松, 唐秋华, 张利平. 多仓储机器人协同路径规划与作业避碰[J]. 信息与控制, 2019, 48(1): 22-28, 34. Xia Q S, Tang Q H, Zhang L P. Cooperative path planning and operation collision avoidance for multiple storage robots[J]. Information and Control, 2019, 48(01): 22-28, 34. |
| [17] |
Huang Y Q, Li Z K, Jiang Y, et al. Cooperative path planning for multiple mobile robots via HAFSA and an expansion logic strategy[J]. Applied Sciences, 2019, 9: 672-682. |
| [18] |
王云峰, 曹小华, 郭兴. 基于改进A*算法和系统短期状态预测的仓储AGV路径规划方法[J/OL]. 计算机集成制造系统[2021-12-30].https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=JSJJ-20210806007&uniplatform=NZKPT&v=EfDktvpY4SAWbZlN7IQSmuTLjL2Kedu0fyCsCmNrQQFMc5EmLCh-BKfjwKTKbc3px. Wang Y F, Cao X H, Guo X. Warehouse AGV path planning method based on improved A* algorithm and system short-term state prediction[J/OL]. Computer Integrated Manufacturing Systems[2021-12-30]. https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=JSJJ20210806007&uniplatform=NZKPT&v=EfDktvpY4SAWbZlN7IQ-SmuTLjL2Kedu0fyCsCmNrQQFMc5EmLChBKfjwKTKbc3px. |
| [19] |
Zhang H M, Li M L, Yang L. Safe path planning of mobile robot based on improved A* algorithm in complex terrains[J]. Algorithms, 2018, 11(4): 44-50. |
| [20] |
贾文友, 江志斌, 李友. 面向产品族优化时间窗下可重入批处理机调度[J]. 机械工程学报, 2015, 51(12): 192-201. Jia W Y, Jiang Z B, Li Y. Family-oriented to optimize scheduling problem of re-entrant batch processing machine with due window[J]. Journal of Mechanical Engineering, 2015, 51(12): 192-201. |