



2. 北京蓝天前沿科技创新中心, 北京 100160;
3. 北京理工大学自动化学院, 北京 100081
2. Beijing Blue Sky Innovation Center for Frontier Science, Beijing 100160, China;
3. School of Automation, Beijing Institute of Technology, Beijing 100081, China
0 引言
近年来,无人机在飞行过程中的稳定控制成为无人机研究领域的热点与难点[1]。高精度、高集成的传感器和驱动器的出现,使大量的算法和理论得以在工程中进行实践,推动了无人机在多个领域的发展和应用,军事领域包括防空压制、区域监视、目标搜索、灾后救援、边境巡逻、毁伤评估等[2];民用方面包括航空摄影、地质勘查、科学研究、交通监测等[3]。目前由于无人机的避障能力以及飞行稳定性等因素的限制,无人机的可靠性还需要接受进一步的考验[4]。随着各行各业对无人机的应用需求日益增长[5],为了提升无人机的控制性能,有必要对无人机的避障能力和稳定飞行能力进行研究。
共轴双旋翼无人机(coaxial rotor unmanned aerial vehicle,CR-UAV)具有结构紧凑、可垂直起降、悬停效率高、易弹药化、易集群使用等优点。目前对于CR-UAV的应用,主要面临两个问题:一是执行任务的无人机,要面对山石丛林、建筑楼宇等静态障碍及空域内的其他无人机,避免碰撞损毁[6];二是无人机避障飞行途中,若不能维持机体稳定的姿态,任务载荷就难以正常工作[7]。为解决上述问题,必须提高CR-UAV飞行过程中的避障能力,同时还需保证无人机在执行任务过程中,机体飞行姿态的稳定性[8]。
针对无人机避障的问题,研究人员利用神经网络[9]、模糊控制[10]、模型预测控制[11]、改进TD3(Twin Delayed deterministic policy gradient)算法[12]、改进A*算法[13]等技术来实现无人机避障控制,但是这些方法构建的控制模型复杂、不易实现。从动物界的躲避障碍物的行为中受到启发,1985年KHATIB[14]提出了一种便捷高效且工程实践性强的避障方法——人工势场法,通过设立由目标引力和障碍物斥力所组成的人工势场,沿着负梯度的方向行进。然而传统人工势场法面临的问题在于势场中存在一定概率遇到局部极小点[15]。为解决这一问题,2010年PANYAKEOW等[16]使用旋转避障的思想,将无人机建模为独轮车,考虑了无人机运动中的约束条件,引入的旋转势场与逼近无人机的姿态和相对位置相适应,避免无人机减速和停留在局部极小点,但该方法未考虑无人机俯仰、滚转、偏航三个方向的加速运动,难以应用于3维环境;2018年张佳龙等[17]提出了一种复合矢量人工势场的无人机编队避障方法,但是该方法在无人机速度过大或者过小、障碍物周围的人工势场强度较弱的情况会产生较大误差,还需要改进;2020年顾育津等[18]通过建立拉普拉斯人工势场,避免了陷入局部极小点的问题,但是该方法计算量大,并未考虑无人机的飞行姿态,难以应用于工程实践。综上可知,大量科研工作者对无人机避障的问题进行了研究,但是所研究的无人机模型过于简单和理想化,且没有考虑避障控制与制导控制的相互影响,存在实际应用性不强的问题。
本研究基于CR-UAV的飞行态势图,提出了一种基于改进人工势场法和自适应神经网络的避障飞行控制新技术。与文[16]相比,本文改进算法的优势在于可应用于3维环境;与文[17]相比,本文算法不会出现在无人机速度过快或者过慢、障碍物周围的人工势场强度较弱等情况下产生较大误差的问题;与文[18]相比,本文算法相对简洁,无人机在避障过程中的姿态变化能够实时反馈和控制,工程实用性强。本文算法所建立的人工势场由围绕障碍物旋转的矢量组成,在避障过程中,矢量旋转的方向和矢量旋转轴线的角度会根据无人机的姿态和与障碍物的相对位置而变化,避免无人机停留在局部极小点。在避障过程中考虑了CR-UAV的制导和控制,所提出的避障方法能够较好地保持无人机在整个避障飞行过程中的姿态稳定。
1 无人机及其数学模型CR-UAV的运动模型如图 1所示,该无人机的上下两个旋翼的转速通过两个无刷电机分别进行控制[19]。在舵机输入信号的控制下,倾斜盘的角度发生改变,使下旋翼在转动过程中出现周期变距,产生在旋翼平面不对称的拉力,在拉力矢量作用下,CR-UAV便可向指定方向飞行[20-21]。

|
| 图 1 共轴双旋翼无人机运动模型 Fig.1 Motion model of CR-UAV |
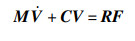
定义V=[p,q,r,u,v,w]T为飞行器在机体坐标系中的速度矢量;其中p,q,r为机体相对于x,y,z轴的角速度,u,v,w为飞行器质心相对于x,y,z轴的线速度,F1,F2分别为上、下旋翼的拉力。使用Euler-Poincare理论得到CR-UAV的动力学关系为
|
(1) |
其中,
|
s(·)表示sin(·),c(·)表示cos(·),Ix、Iy、Iz为无人机沿x、y、z方向上的转动惯量。
无人机的推力为

|
(2) |
其中,U1 =F1 +F2z,U2 =F2y,U3 =F2x,U4 =ξ(F1 -F2),U1为垂直高度控制量,U2为滚转输入控制量,U3为俯仰控制输入量,U4为偏航控制量;ξ为旋转力矩系数,与旋翼受到的阻力和电机轴摩擦系数有关;D为下旋翼升力平面与机体坐标系原点的距离。
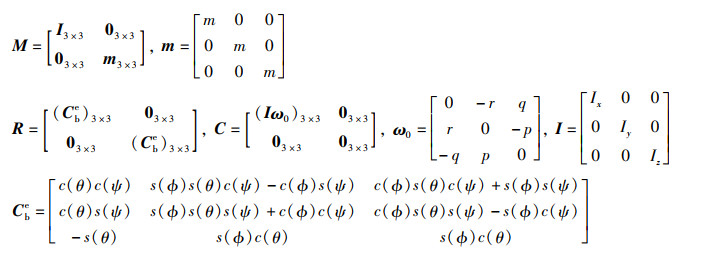
根据叶素理论,假设桨叶攻角为一个固定值,旋翼的推力为
|
(3) |
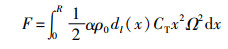
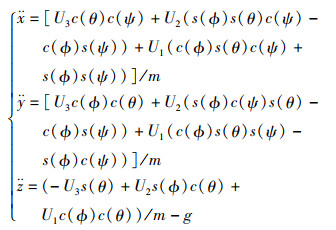
其中,α是桨叶的安装攻角,ρ0是空气密度,dl(x)是桨叶在不同叶素截面的弦长,CT是升力系数,Ω是旋翼的转动速度,根据式(1),可将动力学模型建立为
|
(4) |
|
(5) |
上述CR-UAV参数分别为:ϕ、θ、ψ为机体坐标系下横滚、俯仰和方位角;p、q、r为机体坐标系下3个旋转方向上的角速率;x、y、z表示位置;m表示质量;g为重力加速度;Fx、Fy、Fz表示无人机的拉力;Ix、Iy、Iz为轴向转动惯量。
2 飞行态势图模型无人机的飞行态势图将无人机的感知模块(图像、气压计、IMU、GPS、激光测距等)测得的机体信息和环境参数信息通过对数极坐标系进行整合,在此种表达方式下,飞行态势图的栅格密度可根据需求进行调整,无人机近处密度高,远处密度低,且以球面往外衍生的各个方向具有相同性质,如图 2所示。

|
| 图 2 无人机避障飞行态势图 Fig.2 Obstacle avoidance flight situation diagram of UAV |
对无人机所处3维空间的飞行态势进行栅格化,将环境中的相关信息和无人机自身的飞行数据映射到对数极坐标网格中,无人机的飞行态势图具备了无人机进行避障、飞行以及做各种决策所需的信息依据,且这些信息会随着无人机的飞行实时更新,便于无人机实时调整飞行决策[22]。
飞行态势图参考的对数极坐标系以无人机中心,无人机正前方为偏航方向0°,绕各轴转动的正方向符合右手定则,偏航角度取值范围为[0°,360°],俯仰方向和滚转方向保持为0°,如图 3所示。

|
| 图 3 飞行态势图经纬方向的角度 Fig.3 Longitude and latitude angle of flight situation map |
将球面按照经纬方向进行等分,经线圈分为M等份,每一份在经度方向上均为360°/M;纬线圈分为N等份,每一份在纬度方向上均为180°/N;径向将飞行态势图的最大半径rm分成Q份,划分径向长度:

|
(6) |
其中,λ表示最小栅格径向长度且rm=λaM-1。
将飞行态势图上某一个球面扇形区域用3维数组(i,j,k)表示,其中0≤i≤Q-1,0≤j≤M-1,0≤k≤N-1,i表示径向坐标,j表示经线方向坐标,k表示纬线方向坐标,(i,j,k)与极坐标(r,φ,θ)存在映射关系

结合式(6),得到极坐标系下坐标(r,φ,θ)与飞行态势图 3维数组下标有序数列(i,j,k)映射关系为

|
(7) |
|
(8) |
栅格化的对数极坐标如图 4所示。飞行态势图的每一个栅格的方位角度、俯仰角度、最大层数、径向长度、最大栅格和最小栅格径向长度都可以根据实际需求进行调整。

|
| 图 4 飞行态势图栅格化 Fig.4 Rasterization of flight situation map |
栅格化的飞行态势图由Q×M×N个扇形区域Sijk(x,y,z)组成,扇区在笛卡儿坐标系下可表示为
|
(9) |
将感知到的障碍物的位置、尺寸等信息映射到飞行态势图中,如图 5所示。当飞行态势图中的栅格存在障碍物时,将其作为障碍物区域,在图 5中,离无人机A1最近的栅格Sij1和Sij2对应表示障碍物Obs1;Sij3和Sij4对应表示障碍物Obs2。

|
| 图 5 飞行态势图中的障碍物模型 Fig.5 Obstacle model in flight situation map |
以障碍物Obs2为例,球面AB是能够包含栅格Sij1、Sij2和Sij3且离无人机当前位置O最近的球面,球面半径为rAB=kai。从O引一条直线使OO1⊥AB,有且仅有一个球面O1(x1,y1,zz)满足OO1⊥AB和r1=rAB=kai,可以将球面O1(x1,y1,zz)看作不规则障碍物Obs1的模型。同理,可以获得不规则障碍Obs2的飞行态势图中的障碍模型。根据飞行态势图,无人机周围的所有障碍都可以处理为球形障碍物,便于避障处理。
3 无人机避障飞行控制器设计 3.1 无人机控制器设计对于CR-UAV的飞行控制系统,建立姿态控制回路为控制内环,建立位置控制回路为控制外环。姿态控制回路的作用是使无人机保持稳定的飞行姿态;位置控制回路可以使无人机能够悬停在指定位置或者按照设定好的轨迹飞行[23]。
将欧拉角和角速率作为控制内环,位置量与速度量作为控制外环,则无人机各状态变量分别属于这两个控制环。具体到控制器设计上,采用分层控制的思想来设计飞行控制系统的控制器,结构如图 6所示。

|
| 图 6 基于飞行态势图的改进人工势场控制器框图 Fig.6 Block map of improved artificial potential field controller based on flight situation map |
为了保证避障控制器的设计,兼顾位置控制的准确性和姿态控制的快速稳定性[24-25],在本研究的避障飞行控制中,路径控制采用基于飞行态势图的改进人工势场法、位置控制采用PID控制、姿态控制采用自适应径向基神经网络(RBFNN)控制。
3.2 基于改进人工势场的无人机路径控制传统人工势场算法中,若目标点被障碍物阻隔,斥力与引力的方向正好相反,在无人机行进途中,斥力会增大直至与引力相等,无人机会在一个平衡点处来回振荡,无法到达目标点[26-27],该平衡点就是局部极小点,如图 7所示。

|
| 图 7 局部极小点的情况 Fig.7 The situation of local minimum point |
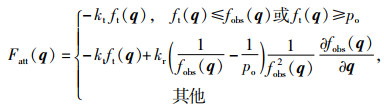
对于局部极小的问题,本研究对人工势场进行改进,当无人机抵达局部极小处,在新的势场作用下,摆脱局部极小点的束缚,解决目标点不可达的问题。引力势场重新设计为
|
(10) |
其中,fobs(q)=||q-qobs||表示无人机与障碍物之间的距离,满足fobs(q) < ft(q) < po;ft(q)=||q-qt||表示无人机与目标点的距离;qobs=[xobs,yobs,zobs]T是障碍物的位置坐标;po是表示障碍物产生的斥力的最大影响范围;kt和kr分别为表示引力、斥力的系数。该势场的引力为
|
(11) |
引入了垂直于斥力势场的旋转势场Uesc,若障碍物被感知到出现在无人机周围的3维空间里,可以通过Uesc产生的旋转力作为牵引,使无人机避免困在局部极小点附近。如图 8所示,Uesc2的作用方向与Urep垂直,Uesc2势场的中心位置处于Obs2的斥力场的中心位置,旋转方向如图所示。

|
| 图 8 基于飞行态势图的改进人工势场法 Fig.8 Improved artificial potential field method based on flight situation diagram |
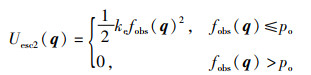
将上述Uesc2定义为
|
(12) |

|
(13) |
其中,ke为旋转势场系数。
使用改进人工势场法进行避障仿真,设置(0 m,0 m,0 m)作为运动的起始点,目标点设置为(15 m,0 m,0 m),在起始点和目标点的连线上设置球形障碍物,在质点的运动路径上会产生局部极小点,如图 9所示,对图中的避障轨迹进行分析,发现采用传统人工势场法进行避障会在(2.7 m,0 m,0 m) 附近出现局部极小点;在采用改进人工势场法的情况下,遇到局部极小点之前,轨迹与传统人工势场法一致,遇到局部极小点之后,运动质点向右侧逃逸出局部极小点,解决了目标不可达问题。

|
| 图 9 局部极小点避障的3维轨迹 Fig.9 3D trajectory of local minimum obstacle avoidance |
图 10中给出了在传统人工势场法和改进人工势场法两种情况下,运动质点与目标点的距离随仿真时间的变化关系曲线,可知两者的起始段路径是一致的,在遇到局部极小点之后,传统人工势场法便陷入了在局部极小点附近的抖动中,由于还未到达目标点,这种抖动便不会停止,其幅度随着仿真步长而改变。反观改进人工势场法,在遇到局部极小点之后,逐步开始逃逸,在第80 s完全逃离了局部极小点。

|
| 图 10 运动质点与目标的距离 Fig.10 Distance between the particle and the target |
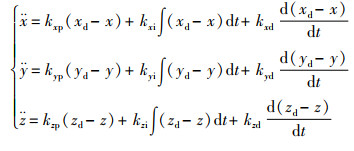
本研究主要目的是保证CR-UAV在避障过程中的姿态稳定性,对于位置外环控制,采用较易实现的PID控制[28],控制算法为
|
(14) |
其中,kxp、kyp、kzp分别为3个位置控制通道的比例系数,kxi、kyi、kzi分别为3个位置控制通道的积分系数,kxd、kyd、kzd分别为3个位置控制通道的微分系数。
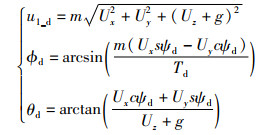
3.4 基于自适应RBFNN的无人机姿态控制 3.4.1 无人机姿态控制系统描述对于姿态控制,以位置控制为基础,为了便于分析,将期望的偏航角设置为ψd=0。对于无人机位置系统中的3个虚拟控制输入Ux、Uy、Uz,为了首先保证无人机的位置,即位置方程(4),将x通道和y通道控制信号Ux、Uy进行反解算,得到姿态控制器的期望输入值ϕd、θd:
|
(15) |
其中,u1_d是期望的总升力,ϕd、θd、ψd为期望的姿态角。为了便于分析,将期望的偏航角设置为ψd=0,则方程(15)简化为
|
(16) |
对位置控制方程进行改写,以期望姿态角为输出量,考虑到CR-UAV的机体特性,对滚转角ϕd和俯仰角θd给出约束条件为
|
(17) |
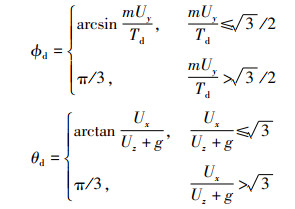
可知位置控制器输出的滚转角ϕd和俯仰角θd指令信号为
|
(18) |
考虑CR-UAV的旋转运动模型以及参数不确定性和外界干扰等,其姿态模型(5)可表示为

|
(19) |
其中,

将非线性未知干扰项以

|
(20) |
根据上述CR-UAV的姿态角跟踪问题,设计自适应RBFNN,完成CR-UAV的自主姿态跟踪控制。
定义姿态系统的跟踪误差为
|
(21) |
其中,ηd为期望姿态角。
定义辅助的状态误差向量E为
|
(22) |
下面设计自适应RBFNN逼近函数fη,使跟踪误差能够逐步收敛到足可接受的范围,控制结构原理图如图 11所示[29]。

|
| 图 11 基于RBFNN的姿态控制结构 Fig.11 Attitude control structure based on RBFNN |
图 11的姿态控制结构中输入的是期望姿态角ηd及1阶、2阶微分和飞行器的姿态状态量η及其1阶微分。RBFNN的多变量输出为
|
(23) |
其中,



|
(24) |
其中,i为网络的输入个数,j为网络隐含层第j个节点,ci是第i个神经元的中心位置;σi是第i个神经元的宽度,表示该神经元的作用域;H(ηin)=[h1,h2,…,hn]T为高斯函数的输出。存在最优权重值,使得神经网络的逼近结果满足:

|
(25) |
其中,ε为神经网络逼近误差。
3.4.3 控制律和自适应律设计考虑CR-UAV的水平运动模型及RBFNN的结构,设计控制律:

|
(26) |
为了提高飞行控制的实时性,引入自适应算法进行权值的在线调整,控制表达式为
|
(27) |
其中,Kη表示的是一个由正常数所构成的矩阵;P是正定的对称矩阵,其元素为自适应调节参数;γ为正常数。依据此控制律,即使存在不确定系统参数或者外界扰动,CR-UAV的姿态角和角速度跟踪可被保证[30]。
3.4.4 稳定性分析由于3个姿态控制通道采用的是同样的姿态稳定控制算法,对其中任一通道进行稳定性分析,取η∈{ϕ,θ,ψ}为3轴姿态角中任一姿态角,将控制律(26)代入系统(19),可得闭环系统为

|
(28) |
其中,

|
(29) |
最优权重值为

|
(30) |
定义逼近误差为

|
(31) |
将式(25)代入式(29)可得

|
(32) |
对于CR-UAV设计李雅普诺夫函数:

|
(33) |
其中,矩阵P满足李雅普诺夫方程
|
(34) |
令

|
(35) |
将
|
将上述

|
取自适应律如式(27),则上式为
|
(36) |
由于

使用Matlab进行CR-UAV飞行避障仿真测试,仿真实验中CR-UAV的相关参数在表 1中给出。
| 参数 | 值 |
| 无人机质量m | 1.636 kg |
| 旋翼至重心距离D | 0.15 m |
| 重力加速度g | 9.8 m/s2 |
| 桨叶实度σ | 0.065 |
| 上旋翼与机体重心的距离d | 0.2 m |
| 桨叶截面升力曲线斜率a0 | 0.12 |
| 诱导速度v0,i,v0,j | 7.98 m/s,16.57 m/s |
| 旋翼半径R | 0.125 m |
| 空气密度ρ0 | 1.29 kg/m3 |
| 惯性矩Ix,Iy,Iz | 36 g·m2,36 g·m2,9 g·m2 |
| 旋翼升力系数CTu,CTl | 9.42×10-3,6.77×10-3 |
| 旋翼扭矩系数CQu,CQl | 6.1×10-4,6.0×10-3 |
进行仿真环境搭建时,将CR-UAV的起飞点设置为(0 m,0 m,0 m),垂直起飞至避障起始点(0 m,0 m,4 m),从避障起始点飞往目标点(20 m,0 m,10 m),设置4个长方体障碍物,仿真环境中的障碍物信息设置情况如表 2所示。
| 单位: m | |||||||||||||||||||||||||||||
| 障碍物编号 | 基准原点(行向量) | 长宽高(行向量) | |||||||||||||||||||||||||||
| 1 | (3,2,3) | (2,2,8) | |||||||||||||||||||||||||||
| 2 | (10,0,1) | (2,2,8) | |||||||||||||||||||||||||||
| 3 | (15,-1,5.5) | (1.5,1.5,7) | |||||||||||||||||||||||||||
| 4 | (4.5,-1,4) | (2,8,10) | |||||||||||||||||||||||||||
为了验证本文控制方法的性能,整个控制方法包括飞行态势图、改进人工势场法、PID位置控制和姿态控制,其中姿态控制部分将基于自适应RBFNN的姿态控制算法与基于PID的姿态算法进行对比,设计两种控制器,其中自适应RBFNN的控制器主要参数设置如表 3所示。
| 控制方法 | 参数 | 数值 |
| 改进人工势场 | kt | 5 |
| kr | 30 | |
| ke | 2 | |
| ke | 3 | |
| PID位置控制 | kxp,kyp,kzp | 2,2,2 |
| kxi,kyi,kzi | 0.03,0.03,0.03 | |
| kxd,kyd,kzd | 6,6,6 | |
| 自适应RBFNN姿态控制 | [cij] |  |
| [σj] | 0.015×[1 1 1 1 1]T | |
| K | (30 50)T | |
| Λη |  |
|
| W初始权值 | 0 | |
| γ | 1 200 | |
| Q |  |
避障飞行仿真结果如图 12所示。图中的蓝色虚线为使用本研究所提出的避障方法计算得到的期望避障轨迹;红色曲线是将本研究所提出的控制器的作用下,模拟出来的CR-UAV的避障飞行轨迹;黑色曲线为在PID姿态控制的情况下得到的避障飞行轨迹。

|
| 图 12 避障仿真3维图 Fig.12 3D view of obstacle avoidance simulation |
在无人机与目标之间设置的4个障碍物,尺寸和位置各不相同,刚开始无人机会遇到障碍物1,障碍物1挡在前进路线上,无人机从飞行态势图获得障碍物的信息,经过判断,得知障碍物4尺寸大,左侧的前进道路被堵,无人机判断出较优的避障方向为右下方。避开障碍物1之后,获取到障碍物2的信息,但是障碍物2不影响飞行轨迹。之后无人机检测到处于飞行路径上的障碍物3,根据飞行态势图判断较优的避障方向为右侧,避障成功后无人机抵达目标点,整个避障过程合理高效。但是在两种姿态控制器的作用下,避障轨迹曲线稍有差异,具体如图 13所示。

|
| 图 13 无人机位置图 Fig.13 Position of UAV |
在图 13中,在x方向与z方向上,两种控制方式得到的模拟位置一致,且都能跟踪上期望位置;y方向上,期望位置与模拟位置的差异主要体现在遇到障碍物后,无人机调整运动方向,从而导致模拟位置稍落后于期望轨迹,由于PID控制模型对于位置和姿态的耦合变化处理能力差,在出现需要机动避障的时候,反应较迟钝,与期望位置的偏差较大。
对上述现象进行分析,两种控制模型中都是采用的PID位置控制,因而两种控制模型得到的位置曲线较为相似。由于本文所设计的避障主要是在y方向进行左右避障,这就造成了x方向和z方向的运动能够很好地跟踪上期望位置,但是y方向会稍落后于期望位置。
由于CR-UAV的位置与姿态的耦合严重,即位置变化必然伴随着姿态变化,反之亦然。虽然两种控制模型只是姿态控制部分存在差异,但是不同的控制模型所带来的姿态与位置的耦合程度不一样,对于姿态的控制会影响位置控制,这就导致了在自适应RBFNN姿态控制的情况下,模拟位置更加贴近期望位置,说明此种情况下模型的耦合程度较低,控制性能更加优越。
为了进一步说明本研究中控制算法的优劣程度,着重对CR-UAV在避障过程中的姿态变化情况进行分析。虽然CR-UAV悬停时可以上下旋翼扭矩平衡,实现稳定的悬停,但是在机动过程中姿态变化大,对于CR-UAV在机动过程中的姿态稳定控制是整个控制算法的核心,同时也是本文的主要关注点。CR-UAV在避障飞行仿真过程中俯仰、偏航、滚转三个方向的姿态变化数据如图 14所示。

|
| 图 14 无人机姿态图 Fig.14 Attitude of UAV |
对图 14进行分析,无人机获取到障碍物位置信息,调整飞行方向时,滚转角和俯仰角出现较大变化,具体出现在7.5 s和33.5 s,分别对应避开障碍物1和障碍物3。两种控制方法下的3个姿态角都存在高频抖动,自适应RBFNN姿态控制下滚转角的最大改变量为1.5°,俯仰角的最大改变量为2.5°,偏航角的变化幅度控制在0.05°;PID姿态控制下滚转角的最大改变量为3.5°,俯仰角的最大改变量为4.2°,偏航角的最大改变量为1.5°。可见与PID姿态控制相比,无人机在自适应RBFNN姿态控制下姿态角的变化量和抖动频率更小,飞行更加稳定且拥有较强的避障能力。
5 结论本研究针对CR-UAV的避障与姿态稳定控制问题,提出了基于改进人工势场法和自适应神经网络的避障飞行控制方法,并进行了仿真验证,主要结论如下:
1) 将无人机周围的重要信息整合到飞行态势图,由于飞行态势图随着无人机的运动实时获取重构,能够确保无人机实时做出最佳决策。
2) 对传统人工势场法中遇到局部极小点便无法抵达目标点的问题进行了针对性的解决,改进了基本势场函数,结合CR-UAV的飞行位姿信息和获取到的障碍物信息,实时调整势场力,使CR-UAV能够顺利完成避障飞行。
3) 在CR-UAV避障飞行的过程中着重考虑了其姿态稳定性,以自适应神经网络为基础,实现了稳定的姿态控制,设计了一种新的避障飞行控制方法。
4) 进行了仿真对比实验,验证了基于飞行态势图的改进的人工势场法能够实现高效地避障,无人机能够以稳定的姿态到达目标点。
| [1] |
秦博, 王蕾. 无人机发展综述[J]. 飞航导弹, 2002, 7(8): 4-10. QIN B, WANG L. Review of the development of UAV[J]. Flying Missiles, 2002, 7(8): 4-10. DOI:10.3969/j.issn.1009-1319.2002.08.003 |
| [2] |
陈黎. 军用无人机技术的发展现状及未来趋势[J]. 航空科学技术, 2013, 4(2): 11-14. CHEN L. Development status and future trend of military UAV technology[J]. Aeronautical Science and Technology, 2013, 4(2): 11-14. DOI:10.3969/j.issn.1007-5453.2013.02.005 |
| [3] |
宋晨晖. 民用无人机应用进展[J]. 机电工程技术, 2018, 47(11): 149-152. SONG C H. Application progress of civil UAV[J]. Mechanical and Electrical Engineering Technology, 2018, 47(11): 149-152. DOI:10.3969/j.issn.1009-9492.2018.11.043 |
| [4] |
PRATS X, DELGADO L, RAMIREZ J, et al. Requirements, issues, and challenges for sense and avoid in unmanned aircraft systems[J]. Journal of Aircraft, 2012, 49(3): 677-687. DOI:10.2514/1.C031606 |
| [5] |
SPRIESTERBACH T, BRUNS K, LI B, et al. Unmanned aircraft system airspace integration in the national airspace using a ground-based sense and avoid system[J]. Johns Hopkins APL Technical Digest, 2013, 32(3): 572-583. |
| [6] |
MANDUCHI R, CASTANO A, TALUKDER A, et al. Obstacle detection and terrain classification for autonomous off-road navigation[J]. Autonomous Robots, 2005, 18(1): 81-102. DOI:10.1023/B:AURO.0000047286.62481.1d |
| [7] |
GONÇALO C, PEDRO E. Obstacle avoidance for unmanned aerial vehicles[J]. Journal of Intelligent & Robotic Systems, 2012, 65(1/2/3/4): 203-217. |
| [8] |
施诗, 陈凯婷. 多旋翼无人机避障技术研究与展望[J]. 科技视界, 2020, 295(1): 163-164. SHI S, CHEN K T. Research and prospect on obstacle avoidance technology of multi-rotor UAV[J]. Science and Technology Vision, 2020, 295(1): 163-164. |
| [9] |
李波, 杨志鹏, 马浩. 一种无监督学习型神经网络的无人机全区域侦察路径规划[J]. 西北工业大学学报, 2021, 39(1): 77-84. LI B, YANG Z P, MA H. An unsupervised learning neural network for unmanned aerial vehicle's whole area reconnaissance path planning[J]. Journal of Northwestern Polytechnical University, 2021, 39(1): 77-84. DOI:10.3969/j.issn.1000-2758.2021.01.010 |
| [10] |
DONG Z N, ZHANG R L, et al. Study on UAV path planning approach based on fuzzy virtual force[J]. Chinese Journal of Aeronautics, 2010, 23(43): 341-350. |
| [11] |
LUIS M, LUIS A I, et al. Constrained generalized predictive control for obstacle avoidance in a quadcopter[J]. Robotica, 2018, 36(9): 1-23. |
| [12] |
唐蕾, 刘广钟. 改进TD3算法在四旋翼无人机避障中的应用[J]. 计算机工程与应用, 2021, 57(11): 254-259. TANG L, LIU G Z. Application of improved TD3 algorithm in obstacle-avoidance of quadrotor UAV[J]. Computer Engineering and Applications, 2021, 57(11): 254-259. DOI:10.3778/j.issn.1002-8331.2003-0163 |
| [13] |
张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12): 2530-2539. ZHANG Z, WU J, DAI J Y, et al. Cooperative tactical planning for multi-UAVs based on improved A* algorithm[J]. Acta Armamentarii, 2020, 41(12): 2530-2539. DOI:10.3969/j.issn.1000-1093.2020.12.019 |
| [14] |
KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[M]//Autonomous Robot Vehicles. Berlin, Germany: Springer: 500-505.
|
| [15] |
张建英, 赵志萍, 刘暾. 基于人工势场法的机器人路径规划[J]. 哈尔滨工业大学学报, 2006, 38(8): 1306-1309. ZHANG J Y, ZHAO Z P, LIU T. Robot path planning based on artificial potential field method[J]. Journal of Harbin Institute of Technology, 2006, 38(8): 1306-1309. DOI:10.3321/j.issn:0367-6234.2006.08.026 |
| [16] |
PANYAKEOW P, MESBAHI M. Decentralized deconfliction algorithms for unicycle UAVs[C]//2010 American Control Conference. Piscataway, USA: IEEE, 2010: 794-799.
|
| [17] |
张佳龙, 闫建国, 张普, 等. 基于改进人工势场的无人机编队避障控制研究[J]. 西安交通大学学报, 2018, 52(11): 112-119. ZHANG J L, YAN J G, ZHANG P, et al. Research on obstacle-avoidance control of UAV formation based on improved artificial potential field[J]. Journal of Xi'an Jiaotong University, 2018, 52(11): 112-119. |
| [18] |
顾育津, 宋孝成, 刘晓培, 等. 基于拉普拉斯人工势场的无人机避障控制[J]. 中国科学院大学学报, 2020, 37(5): 681-687. GU Y J, SONG X C, LIU X P, et al. Control of UAV obstacle avoidance based on Laplacian artificial potential field[J]. Journal of University of Chinese Academy of Sciences, 2020, 37(5): 681-687. |
| [19] |
董志岩. 共轴双旋翼无人直升机建模与控制算法研究[D]. 长春: 吉林大学, 2016. DONG Z Y. Research on modeling and control algorithm for unmanned coaxial dual rotor helicopter[D]. Changchun: Jilin University, 2016. |
| [20] |
袁夏明, 朱纪洪, 毛漫. 共轴式无人直升机建模与鲁棒跟踪控制[J]. 控制理论与应用, 2014, 31(10): 1285-1294. YUAN X M, ZHU J H, MAO M. Modeling and robust tracking control of coaxial unmanned helicopter[J]. Control Theory & Applications, 2014, 31(10): 1285-1294. DOI:10.7641/CTA.2014.31317 |
| [21] |
WEI Y R, DENG H B, PAN Z H, et al. Research on a combinatorial control method for coaxial rotor aircraft based on sliding mode[J]. Defence Technology, 2022, 18(2): 280-292. DOI:10.1016/j.dt.2020.12.003 |
| [22] |
PAN Z H, LI D F, YANG K, et al. Multi-robot obstacle avoidance based on the improved artificial potential field and PID adaptive tracking control algorithm[J]. Robotica, 2019, 37(11): 1883-1903. DOI:10.1017/S026357471900033X |
| [23] |
管军, 易文俊, 常思江, 等. 某型无人机三维空间航迹跟踪控制方法研究[J]. 兵工学报, 2016, 37(1): 64-70. GUAN J, YI W J, CHANG S J, et al. Study of flight path tracking and control of an UAV in 3D space[J]. Acta Armamentarii, 2016, 37(1): 64-70. DOI:10.3969/j.issn.1000-1093.2016.01.010 |
| [24] |
ZHANG N, GAI W D, ZHANG G L. An active disturbance rejection control guidance law-based collision avoidance for unmanned aerial vehicles[J]. Aerospace Science & Technology, 2017, 77(6): 658-669. |
| [25] |
PENNEY R W. Collision avoidance within flight dynamics constraints for UAV applications[J]. Aeronautical Journal, 2005, 109(1094): 193-199. |
| [26] |
OMER C, IBRAHIM Z, GURAY Y. Establishing obstacle and collision free communication relay for UAVs with artificial potential fields[J]. Journal of Intelligent & Robotic Systems, 2013, 69(1/2/3/4): 361-372. |
| [27] |
胡海兵, 汪国庆, 赖重远, 等. 四旋翼无人机自主避障系统的设计与实现[J]. 现代电子技术, 2018, 41(22): 133-137. HU H B, WANG G, LAI Z Y, et al. Design and implementation of autonomous obstacle avoidance system for quadrotor UAV[J]. Modern Electronics Technique, 2018, 41(22): 133-137. |
| [28] |
杨旭, 曹立佳, 刘洋. 基于自耦PID控制的四旋翼无人机姿态控制[J]. 兵器装备工程学报, 2021, 42(10): 170-175. YANG X, CAO L J, LIU Y. Attitude control of quadrotor based on SC-PID control[J]. Journal of Ordnance Equipment Engineering, 2021, 42(10): 170-175. |
| [29] |
刘金琨. RBF神经网络自适应控制机及MATLAB仿真[M]. 第2版. 北京: 清华大学出版社, 2014: 57-66. LIU J K. RBF neural network control for mechanical systems: Design, analysis, and MATLAB simulation[M]. 2nd ed. Beijing: Tsinghua University Press, 2014: 57-66. |
| [30] |
李希, 谭建豪. 基于自适应RBFNN噪声估计的自抗扰控制在姿态控制中的应用[J]. 机器人, 2019, 41(1): 9-18. LI X, TAN J H. Application of the active disturbance rejection control based on adaptive RBFNN noise estimating to attitude control[J]. Robot, 2019, 41(1): 9-18. |