



0 引言
随着传感器、电子、人工智能以及控制等技术的快速发展,机器人行业开始了新的发展。多移动机器人编队在协同运输、救援以及安防等方面[1-4]有着广阔的应用前景,已成为机器人研究的一个重要课题。目前常用的编队控制方法有领航跟随法、基于行为法和虚拟结构法等,其中领航跟随法具有控制简单、鲁棒性强等优点被广泛应用。
很多学者利用反步法[5-7]、滑模控制[8-11]、神经网络[12-13]等方法设计领航跟随编队控制器,与上述控制方法相比,模型预测控制(MPC)[14-16]可以避免选择复杂的李雅普诺夫函数,在处理多约束方面具有很大优势,且具有良好的控制性能,因而被广泛应用于编队研究中。文[14]基于分布式模型预测和一致性理论设计控制器,以实现具有避碰功能的领航跟随编队控制。文[15]提出一种基于神经网络优化的非线性模型预测控制(NMPC)方法,通过该方法控制领航跟随机器人的编队相对位置。文[16]通过引入自身和邻居的状态估计设计代价函数,以无人机为对象设计模型预测控制器实现编队控制。然而上述文献研究均未考虑扰动对编队控制的影响,当系统模型不匹配或受到干扰影响时,会出现输出误差问题。
在实际的应用中,移动机器人具有非线性、强耦合等特征,并且被应用于复杂的工作环境中,因此,移动机器人不可避免会受到风向、路面平整、车轮打滑等外部环境扰动和参数变化、建模理论限制无法得到精确的数学模型而引起的内部扰动的影响,这些扰动会使得编队控制过程中出现移动机器人无法保持编队队形的问题。现有文献对于扰动作用下的多移动机器人控制问题展开了研究[17-22]。文[17]设计了一种分布式控制算法,解决了多机器人控制输入存在干扰情况下的有限时间一致性问题。文[18]利用神经网络对多智能体系统模型的不确定性和外部扰动进行逼近,实现了一致性控制。文[19]提出一种固定时间终端滑模控制策略,针对系统不确定性和外部干扰,设计固定时间观测器对干扰进行观测估计,但该方法无法保证系统的连续性,易存在抖振现象。文[20]对系统存在的不确定性,通过模糊逻辑系统进行补偿,有效降低了系统的抖振。
但是,在领航跟随编队控制方面对扰动的研究问题仍有一些不足。如上述文献仅考虑跟随机器人的干扰,假设领航机器人不受干扰,与实际编队情况存在差别。实际的编队应用中,领航机器人和跟随机器人可能处于相同的干扰环境中,因此,考虑跟随机器人自身扰动,以及领航机器人所受扰动对跟随机器人产生的影响是很有必要的。
为解决以上问题,本文针对多移动机器人编队中的领航者和跟随者同时受扰动问题,设计基于扩张状态观测器(ESO)的模型预测(MPC)编队控制器。建立带有扰动项的领航跟随编队模型,将该模型作为预测模型设计MPC控制器,并设计ESO对移动机器人在运行过程中受到的扰动进行估计,从而提高多移动机器人编队系统整体鲁棒性。
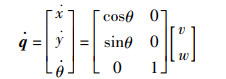
1 系统模型 1.1 带扰动的移动机器人模型移动机器人的结构模型如图 1所示。假设车轮在纯滚动无滑动的情况下进行相对运动时,移动机器人满足非完整约束条件,其运动学模型为
|
(1) |

|
| 图 1 移动机器人模型 Fig.1 Mobile robot model |
其中,q=[x y θ]T表示移动机器人的位姿向量,θ为运动方向角,u=[v w]T表示移动机器人的速度向量,v和w分别代表线速度和角速度。
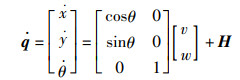
由于移动机器人是非线性系统,在实际编队运动过程中易受参数变化、传感器引起的测量误差、风向、车轮打滑以及路面平整度等内外扰动因素的影响,将这些内外扰动视为综合扰动项H,并假设H(t)是一阶连续可微且有界。||H||≤δ,δ为正常数;
|
(2) |
其中,H=[h1 h2 h3]T。
1.2 带扰动的多移动机器人编队模型基于距离角度的领航跟随编队模型如图 2所示,它包含具有相对关系的两个非完整约束机器人。其中,领航机器人(leader)负责跟踪期望轨迹,跟随机器人(follower)根据预先设定的期望相对距离和期望相对方向角与领航机器人形成特定的队形。用P=[L ψ β]T表示编队状态量,L表示跟随者与领航者之间的相对距离;ψ表示领航者航向角与两机器人之间距离连线的夹角,称为相对方向角;β表示两者航向角之差。用ql=[xl yl θl]T表示领航机器人的位姿,qf=[xf yf θf]T表示跟随机器人的位姿。本文主要研究在编队运动过程中领航者和跟随者同时受到综合扰动的情况并作出如下假设:

|
| 图 2 领航跟随机器人编队结构示意图 Fig.2 Structure diagram of leader and follower robot formation |
假设1 在编队系统中,移动机器人的结构相同。
假设2 领航机器人跟踪一条预设的时变轨迹。
假设3 领航机器人的速度可以通过通讯传递给跟随机器人。
从图 2中可知,当确定领航机器人的位姿ql时,跟随机器人qf位姿可表示为

|
(3) |
L和ψ满足如下关系:

|
(4) |

|
(5) |
编队控制目标是控制距离L、角度ψ和方向角差分别收敛到期望的距离Ld、期望的角度ψd和βd,即


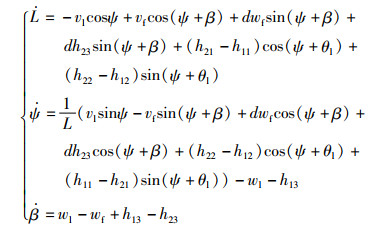
对式(4)、式(5)求导,并将式(2)代入化简可得到带干扰的编队模型:
|
(6) |
其中,H1=[h11 h12 h13]T、H2=[h21 h22 h23]T分别表示领航机器人和跟随机器人各自所受到的综合扰动。
2 基于扩张状态观测器的模型预测编队控制器整体控制框架如图 3所示,编队控制器采用MPC算法,ESO1用来对领航机器人受到的综合扰动H1进行实时估计,ESO2用来对跟随机器人受到的综合扰动H2进行实时估计。ESO1、ESO2和MPC控制器相结合作为系统的整体控制器,为跟随机器人提供控制输入量。

|
| 图 3 编队控制器整体框图 Fig.3 Overall block diagram of the formation controller |
图 3中,q和qd分别为领航机器人的实际位姿和期望位姿;e为领航机器人位姿误差,e=q-qd;ul为领航机器人的控制输入量;

将领航机器人和跟随机器人的各状态方程统一表示成如下形式:

|
(7) |
其中,q11,q12,q13分别表示领航机器人在x,y,θ方向的变量;q21,q22,q23分别表示跟随机器人在x,y,θ方向的变量;u11=u12,u13表示领航机器人的输入量;u21=u22,u23表示跟随机器人的输入量;b11,b12,b13分别表示领航机器人在x,y,θ方向的输入增益;b21,b22,b23分别表示跟随机器人在x,y,θ方向的输入增益;h11,h12,h13分别表示领航机器人所受的综合扰动;h21,h22,h23分别表示跟随机器人所受的综合扰动。
为了实现对系统的综合扰动的估计,定义xij, 1=qij,xij, 2=hij,

|
(8) |
为了保证观测器的收敛性,由对综合扰动H的假设可知扰动hij和其1阶导数都是有界的,则可以得到γ是有界的。系统(8)设计的ESO如下:

|
(9) |
其中,zij, 1为状态xij, 1的观测值;zij, 2为系统扰动hij的估计值;βij, 1和βij, 2为ESO的增益值,是两个均为正数的可调参数;eij为系统的状态估计误差,eij, 1=zij, 1-xij, 1,eij, 2=zij, 2-xij, 2。
系统(8)的扩展状态观测误差方程为

|
(10) |
通过选取合适的βij, 1和βij, 2的值,使观测误差矩阵
为了提高MPC控制计算速度,需对式(6)进行线性化和离散化处理。
将编队模型式(6)可以简化为如下形式:

|
(11) |
其中,P=[L ψ β]T,u=[vf wf]T,H=[h11 h12 h13 h21 h22 h23]T。
定义参考轨迹上的任意点均满足式(12):

|
(12) |
其中,Pr为编队参考状态量;ur为系统的参考输入;Hr为参考干扰量。
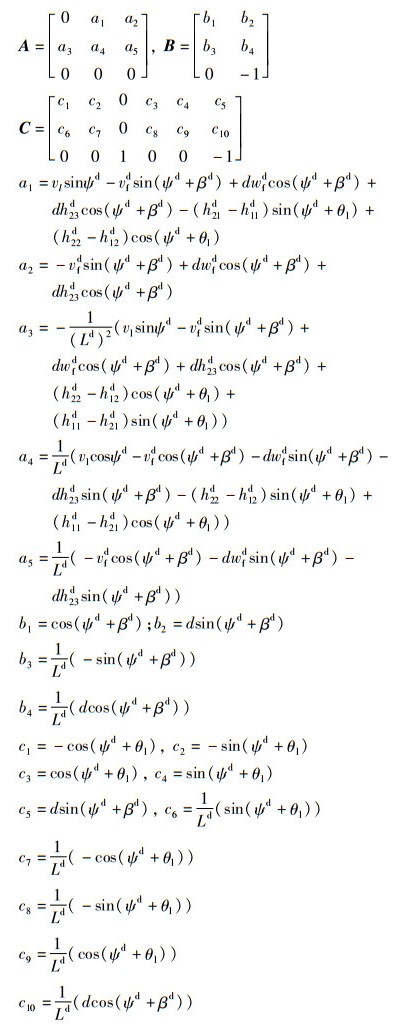
利用泰勒公式将式(11)在参考轨迹点处(Pr,ur,Hr)展开,忽略高阶项可得:

|
(13) |
其中,JP为f相对于P的雅可比矩阵,Ju为f相对于u的雅可比矩阵,HH为f相对于H的雅可比矩阵。
通过对式(12)和式(13)进行相减,可以得到线性化的编队模型的系统状态方程式为

|
(14) |
其中,

|
对式(14)进行离散化处理,可得离散化的线性状态表达式为

|
(15) |
其中,Ak=I+TA,Bk=BT,Ck=CT,T为采样时间间隔。
预测模型
在建立编队系统预测模型时,为了增强系统的可控性,在预测模型的状态变量中加上k-1时刻的控制量,则预测模型的状态变量如下:
|
状态量扩增后的系统方程为

|
(16) |
其中,

|
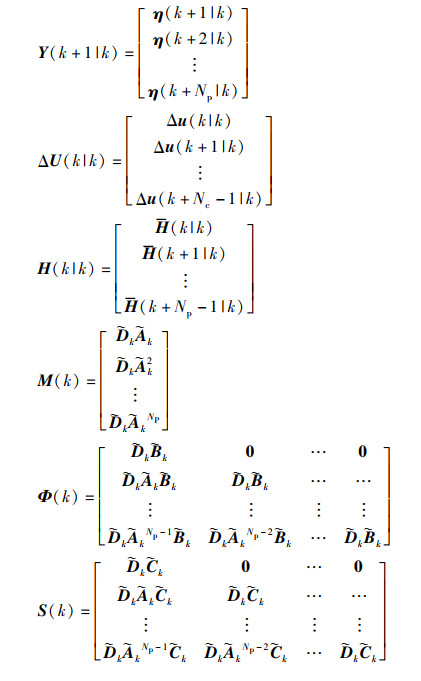
定义预测时域为Np,控制时域为Nc,在k时刻,根据式(16)可推导出预测时域内系统的预测输出为

|
(17) |
式中,
|
优化求解
目标函数要保证跟随机器人快速且平稳地实现对参考轨迹的无差跟踪,因此,目标函数包括系统状态量的偏差和控制量的优化两部分,第一部分保证系统状态跟踪上期望路径,第二部分保证控制动作的平稳性。为了避免被控系统控制量发生突变的情况,采用控制增量代替控制量并加入松弛因子,防止求解过程中得不到可行解的情况。目标函数设为如下形式:
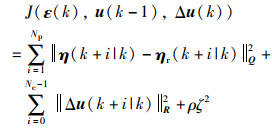
|
(18) |
式中,ηr表示系统期望状态量;Q为预测时域权重矩阵,R为控制时域权重矩阵;ρ为权重系数,ζ为松弛因子。
在编队控制中,需要考虑对控制量、控制增量以及状态量的限制,因此结合约束条件,将式(18)转化为二次规划问题:

|
(19) |
其中,ΔUmax,ΔUmin分别为系统控制增量的最大值和最小值,Umax,Umin分别为系统控制量的最大值和最小值,ηmax,ηmin分别为系统输出量的最大值和最小值;
|
反馈校正
通过对式(19)进行求解,可以得到最优的控制序列




在对本文所提MPC方法进行仿真验证之前,先验证所设计的ESO的有效性,扩张状态观测器参数设置为βs1=diag([20 20 20 20 20 20]),βs2=diag([100 100 100 100 100 100])。选取如下两组扰动信号进行观测:
扰动信号1:0.01cos(0.1t)+0.05
扰动信号2:0.2sin(0.1t)+0.3cos(0.03t)
ESO对两组扰动信号的观测结果如图 4、图 5所示,观测误差如图 6、图 7所示,从扰动估计图中可以看出,本文所设计的ESO得到的扰动的估计值能够很快收敛于扰动实际值;由于干扰为时变扰动,从扰动估计误差图中可以看出,扰动误差在稳定后均有小范围的波动,扰动信号1的误差波动范围在0的±0.02%,扰动信号2的误差波动范围在0的±0.05%,说明本文所设计的ESO能够较好地实现对系统所受实际扰动的估计。

|
| 图 4 扰动信号1估计曲线 Fig.4 Disturbance signal 1 estimation curve |

|
| 图 5 扰动信号2估计曲线 Fig.5 Disturbance signal 2 estimation curve |

|
| 图 6 扰动信号1估计误差曲线 Fig.6 Disturbance signal 1 estimation error curve |

|
| 图 7 扰动信号2估计误差曲线 Fig.7 Disturbance signal 2 estimation error curve |
下面验证本文所提出的基于ESO的MPC编队控制方法的有效性,设计如下对比仿真实验:
A:采用标准MPC控制方法,对领航机器人扰动和跟随机器人扰动均不做处理。
B:采用基于ESO的MPC编队控制方法,跟随机器人仅针对自身所受扰动用设计的ESO2对扰动进行估计补偿,领航机器人扰动不做处理。
C:采用基于ESO的MPC编队控制方法,跟随机器人同时对领航机器人和自身所受的扰动通过ESO1和ESO2进行估计补偿。
分别用圆形曲线和直线编队跟踪进行验证,给出具体的参数如下:
圆形曲线编队跟踪:编队的主轨迹由领航机器人产生,参考轨迹为一个半径为10 m的圆,初始位姿为ql=[10 0 0]T,期望速度为vld=2 m/s,wld=0.2 rad/s,参考轨迹具体描述为
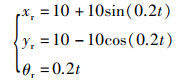
|
对于编队系统,设置跟随机器人的期望编队状态为[ld ψd βd]T=[1.5 π/2 0]T,初始编队状态为[L ψ β]T=[1 5π/6 0]T,期望速度为vfd=1.8 m/s,wfd=0.2 rad/s,机器人结构参数d=0.2 m。
MPC控制器参数为:预测时域Np=4,控制时域Nc=3,采样周期T=0.1 s,松弛因子ρ=10,权重矩阵分别为Q=diag([1 1 1]),R=diag([1 1]),设置整个仿真时长为60 s。为了保证移动机器人达到良好的编队效果,同时提升系统的抗干扰能力,在仿真中给移动机器人施加的扰动参数为:领航机器人的干扰为h11=0.2sint,单位m/s;h12=0.2cost,单位m/s;h13=0.1cost,单位rad/s;跟随机器人干扰h21=0.2sint,单位m/s;h22=0.2cost,单位m/s;h23=0.1cost,单位rad/s。
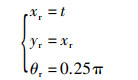
直线编队跟踪:领航机器人的主轨迹选取直线为参考路径,初始位姿为ql=[-0.3 0.1 0.2π]T,期望速度为vld= 
|
对于编队系统,设置跟随机器人的期望编队状态为[ld φd βd]T=[5 5π/6 0]T,初始编队状态为[L φ β]T=[4.5 5π/6 0]T,期望速度为vfd=
从图 8和图 12仿真结果可以看出,情况A的仿真曲线:跟随机器人同时受到领航机器人和自身所受的扰动,但是控制器没有考虑扰动对系统的影响,由局部图 1和局部图 3可以看出跟随机器人与领航机器人无法形成期望编队队形。

|
| 图 8 情况ABC圆形轨迹对比曲线图 Fig.8 Situation ABC circular trajectory comparison graph |

|
| 图 9 编队相对距离曲线 Fig.9 Relative distance curve of formation |

|
| 图 10 编队相对方向曲线 Fig.10 The relative direction of the formation curve |

|
| 图 11 编队相对方向角差曲线 Fig.11 The relative direction angle difference curve of the formation |

|
| 图 12 情况ABC直线轨迹对比曲线图 Fig.12 Situation ABC straight line trajectory comparison graph |
情况B的仿真曲线:由于跟随机器人没有对领航机器人所受扰动估计补偿,由局部图 2可以看出领航机器人的扰动滞后会影响到跟随机器人的编队跟踪精度,导致跟随机器人在一定程度上会偏离期望的编队路径。
情况C的仿真曲线:跟随机器人同时对领航机器人和自身所受的扰动通过ESO1和ESO2进行估计补偿,由3个局部图可以看出情况C的编队跟踪效果优于情况A和情况B,在二者同时受到扰动时,跟随机器人仍可以以设定的期望编队状态跟踪领航机器人。通过编队轨迹曲线对比图,说明了在为跟随机器人设计编队控制器时,对领航机器人和跟随机器人受到的扰动同时估计补偿的必要性。
图 9~图 11和图 13~图 15分别为ABC三种情况以及系统不考虑扰动时采用标准MPC设计的理想编队控制器的轨迹为圆形和直线的编队状态量曲线对比图,三种情况的控制效果使编队状态量L,ψ,β分别收敛到期望值的误差范围对比分析如表 1。

|
| 图 13 编队相对距离曲线 Fig.13 Relative distance curve of formation |

|
| 图 14 编队相对方向ψ曲线 Fig.14 The relative direction ψ of the formation curve |

|
| 图 15 编队相对方向角差β曲线 Fig.15 The relative direction angle difference β curve of the formation |
| 单位: % | |||||||||||||||||||||||||||||
| 情况 | 圆形编队跟踪 | 直线编队跟踪 | |||||||||||||||||||||||||||
| L | Ψ | β | L | Ψ | β | ||||||||||||||||||||||||
| A | 47.7 | 29.9 | 30 | 6 | 8.5 | 8.7 | |||||||||||||||||||||||
| B | 20 | 20.4 | 15 | 4 | 8.5 | 6 | |||||||||||||||||||||||
| C | 6.7 | 8.9 | 5 | 1.6 | 5.4 | 3.5 | |||||||||||||||||||||||
通过表 1对比分析可以看出,情况C的编队状态误差均小于其他两种情况,因此在扰动作用下,同时对领航和跟随机器人扰动估计补偿的编队控制方法能够有效地抑制扰动对编队系统的跟踪。
4 实验分析如图 16所示,两个移动机器人完成从任意初始状态到构成编队队形,并在外界干扰存在下沿直线轨迹保持编队运行。领航机器人初始位姿为ql=[0.13 0.12 0.2π]T,vl=0.05 m/s,ωl=0 rad/s。跟随机器人初始位姿为qf=[0.5 0.07 0.2π]T,两个机器人完成相对距离为0.3 m、角度为5π/6的队形运行。实验使用里程计结合IMU获取领航和跟随机器人的定位信息,上位机处理定位数据以及基于ESO的MPC编队算法的运行。跟随机器人通过zigbeeCC2530模块接收控制命令,实现与领航机器人完成编队。

|
| 图 16 领航跟随机器人编队运行过程 Fig.16 Leader and follower formation in operation |
在T=24 s时,由于两个机器人同时受到外界干扰的影响,实际轨迹均偏离期望轨迹。在T=30 s时,跟随机器人在所提控制方法的作用下与领航机器人减小误差,从图 17的实验轨迹图可以看出跟随机器人仍能够与领航机器人保持基本的编队队形。由于zigbee通信在收发数据时出现数据延时情况,导致机器人运动轨迹不平滑。

|
| 图 17 编队实验运动轨迹 Fig.17 Formation experiment trajectory |
图 18为编队误差曲线图,由于给定的起始位姿与期望编队位姿不一致,导致较大的初始位姿偏差,在24 s~40 s时间段内,由于人为的外界干扰影响,编队状态量均发生改变,造成较大的偏差存在,编队距离的偏差范围是-0.08 m~0 m;编队角度ψ的偏差范围是0~0.11 rad;编队航向角β的偏差范围是0~0.1 rad。40 s之后,编队系统克服干扰的影响,基本恢复编队队形,且编队状态误差趋于0。上述结果说明了本文所设计的基于ESO的MPC编队控制方法可以较好的克服扰动所带来的影响。

|
| 图 18 编队状态误差 Fig.18 Formation status error |
本文针对领航机器人和跟随机器人同时存在扰动影响的编队控制问题,建立带有干扰项的领航跟随编队模型,使其更符合编队运动控制的实际情况,增强系统的实用性。为了补偿干扰对系统的影响,将ESO和MPC进行有效结合,提出一种扰动下的领航跟随多移动机器人编队控制策略。经过仿真及实物实验,结果说明了提出的基于ESO的MPC编队控制方法可以使跟随机器人轨迹以期望的距离角度跟踪领航机器人的实际轨迹,形成编队队形。以及对领航机器人和跟随机器人受到的扰动同时估计补偿的重要性。多移动机器人编队运动也会处在障碍环境中,因此在本文的研究基础上,后续将会对编队避障运动问题进行研究。
| [1] |
原魁, 李园, 房立新. 多移动机器人系统研究发展近况[J]. 自动化学报, 2007, 33(8): 785-794. YUAN K, LI Y, FANG L X. Recent development of multi-mobile robot system research[J]. Acta Automatica Sinica, 2007, 33(8): 785-794. |
| [2] |
王帅, 周乐来, 李贻斌, 等. 多移动机器人编队领航跟随方法研究进展[J]. 无人系统技术, 2019, 2(5): 1-8. WANG S, ZHOU L L, LI F Y, et al. Research progress of multi-mobile robot formation lead-following method[J]. Unmanned Systems Technology, 2019, 2(5): 1-8. |
| [3] |
GHOSH A, GHOSH A, KONAR A, et al. Multi-robot cooperative box-pushing problem using multi-objective particle swarm optimization technique[C]//2012 World Congress on Information and Communication Technologies. Piscataway, USA: IEEE, 2012: 272-277.
|
| [4] |
OH K K, PARK M C, AHN H S. A survey of multi-agent formation control[J]. Automatica, 2015, 53(1): 424-440. |
| [5] |
王保防, 张瑞雷, 李胜. 基于轨迹跟踪车式移动机器人编队控[J]. 控制与决策, 2015, 30(1): 176-180. WANG B F, ZHANG R L, LI S. Formation control of vehicle-type mobile robots based on trajectory tracking[J]. Control and Decision, 2015, 30(1): 176-180. |
| [6] |
HAO Y, WANG J, CHENPINSKIY S A, et al. Backstepping based trajectory tracking control for a four-wheel mobile robot with differential-drive steering[C]//36th Chinese Control Conference. Piscataway, USA: IEEE, 2017: 4918-4923.
|
| [7] |
张瑞雷, 李胜, 陈庆伟. 车式移动机器人动态编队控制方法[J]. 机器人, 2013, 35(6): 651-656. ZHANG R L, LI S, CHEN Q W. Dynamic formation control method for vehicular mobile robot[J]. Robot, 2013, 35(6): 651-656. |
| [8] |
江浩斌, 曹福贵, 朱畏畏. 基于滑模控制的智能车辆集群运动控制方法[J]. 江南大学学报(自然科学版), 2018, 39(4): 385-390. JIANG H B, CAO F G, ZHU W W. Motion control method of intelligent vehicle cluster based on sliding mode control[J]. Journal of Jiangnan University (Natural Science Edition), 2018, 39(4): 385-390. |
| [9] |
李天龙, 柏建军. 基于双幂次滑模的多机器人编队控制[J]. 南京信息工程大学学报(自然科学版), 2021, 13(1): 111-115. LI T L, BAI J J. Multi-robot formation control based on double-power sliding mode[J]. Journal of Nanjing University of Information Science & Technology (Natural Science Edition), 2021, 13(1): 111-115. |
| [10] |
周映江, 蒋国平, 周帆, 等. 基于滑模方法的分布式多无人机编队控制[J]. 信息与控制, 2018, 47(3): 306-313. ZHOU Y J, JIANG G P, ZHOU F, et al. Distributed multi-UAV formation control based on sliding mode method[J]. Information and Control, 2018, 47(3): 306-313. |
| [11] |
马亚丽, 宗群, 董琦, 等. 执行器饱和情况下四旋翼无人机的快速终端滑模控制[J]. 信息与控制, 2017, 46(2): 204-210. MA Y L, ZONG Q, DONG Q, et al. Fast terminal sliding mode control for quadrotor unmanned aerial vehicle with actuator saturation[J]. Information and Control, 2017, 46(2): 204-210. |
| [12] |
彭滔, 刘成军. 含未知信息的轮式移动机器人编队确定学习控制[J]. 控制理论与应用, 2018, 35(2): 239-247. PENG T, LIU C J. Formation determination learning control of wheeled mobile robots with unknown information[J]. Control Theory & Applications, 2018, 35(2): 239-247. |
| [13] |
李艳东, 朱玲, 郭媛, 等. 基于径向基函数神经网络的移动机器人多变量固定时间编队控制[J]. 信息与控制, 2019, 48(6): 649-657. LI Y D, ZHU L, GUO Y, et al. Multi-variable fixed-time formation control of mobile robots based on radial basis function neural network[J]. Information and Control, 2019, 48(6): 649-657. |
| [14] |
KURIKI Y, NAMERIKAWA T. Formation control with collision avoidance for a multi-UAV system using decentralized MPC and consensus-based control[J]. SICE Journal of Control, Measurement, and System Integration, 2015, 8(4): 285-294. |
| [15] |
XIAO H, CHEN C L P. Leader-follower consensus multi-robot formation control using neurodynamic-optimization-based nonlinear model predictive control[J]. IEEE Access, 2019, 7: 43581-43590. |
| [16] |
赵超轮, 戴邵武, 赵国荣, 等. 基于分布式模型预测控制的无人机编队控制[J]. 控制与决策, 2022, 37(7): 1763-1771. ZHAO C L, DAI S W, ZHAO G R, et al. UAV formation control based on distributed model predictive control[J]. Control and Decision, 2022, 37(7): 1763-1771. |
| [17] |
姜玉涛, 刘忠信, 陈增强. 带扰动的多非完整移动机器人分布式有限时间一致性控制[J]. 控制理论与应用, 2019, 36(5): 737-745. JIANG Y T, LIU Z X, CHEN Z Q. Distributed finite-time consistent control of multi-nonholonomic mobile robots with disturbances[J]. Control Theory & Applications, 2019, 36(5): 737-745. |
| [18] |
OU Z G, CHENG L, TAN M. Decentralized robust adaptive control for the multiagent system consensus problem using neural networks[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2009, 39(3): 636-647. |
| [19] |
余明裕, 李仲昆, 王泊桦. 基于固定时间扰动观测器的水面无人艇精确编队控制[J]. 控制与决策, 2023, 38(2): 379-387. YU M Y, LI Z K, WANG B Y. Precise formation control of surface unmanned vehicles based on fixed time disturbance observer[J]. Control and Decision, 2023, 38(2): 379-387. |
| [20] |
NAIR R R, KARKI H, SHUKLA A, et al. Fault-tolerant formation control of nonholonomic robots using fast adaptive gain nonsingular terminal sliding mode control[J]. IEEE Systems Journal, 2018, 13(1): 1006-1017. |
| [21] |
ZUO Z, DEFOORT M, TIAN B, et al. Fixed-time stabilization of second-order uncertain multivariable nonlinear systems[C]//35th Chinese Control Conference. Piscataway, USA: IEEE, 2016: 907-912.
|
| [22] |
LI Y, ZHU L, GUO Y. Observer-based multivariable fixed-time formation control of mobile robots[J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 403-414. |