



0 引言
复杂工业过程往往具有很强的非线性并难以建立精确的数学模型,同时具有不同程度的不确定性,还有各种各样的随机干扰,从而导致单一使用常规控制器难以有效控制。切换控制是解决一类难以建立精确数学模型的非线性系统的主要控制方法之一,CHEN等[1]最早研究了一类非线性系统的切换控制方法,取得了较好的控制效果。文[2]将非线性广义预测自适应控制器和文[1]的切换控制算法相结合提出一种切换控制方法。文[3-4]采用ANFIS(adaptive-network-based fuzzy inference systems) 对未建模动态项进行智能建模并设计前馈补偿器,提出了一种非线性自适应切换控制方法;文[5]充分利用被控对象的历史可测数据提出了一种虚拟未建模动态补偿的非线性PID(proportional-integral- derirative)控制算法,改善了控制效果。文[6]在文[5]的基础上,提出了一种数据驱动的非线性自适应切换控制方法,有效避免了有用数据的丢失。文[7]提出一种基于LMI(linear matrix inequality)的预测模型,与文[4-7]的方法不同,文[7]将系统的非线性部分转化为二次平方和优化问题,取得了不错的控制效果,但算法相对复杂。
另外,文[8]研究了一种带有混合动态逻辑的广义预测控制。文[9]提出了一种多模型监督自适应控制方法,但上述方法通常忽略掉输入约束条件,可能会导致控制性能下降。文[10]提出一种以最小二乘法和随机配置网络交替辨识的智能建模方法,该方法有效地提高了非线性系统的辨识精度。文[11-14]提出一种带死区的切换控制方法,而且文[14]考虑了系统的约束条件;文[15]研究了具有模式相关驻留时间预测控制方法,但所提的算法应用于非线性系统时复杂度较高。
深度学习技术可有效避免传统神经网络存在梯度消失和局部最优解等不足,进而得到了广泛应用,如文[16]提出一种解决序贯数据问题的LSTM并应用于智能电网负荷预测。文[17]提出基于双向LSTM的水量预测方法,在预测效果方面取得了不错的成效。文[18]提出基于LSTM焦炉火道温度预测方法,也取得了较好的结果。文[19]针对硅单晶直径的控制问题提出一种混合模型的控制方法,该方法不仅可以精确地控制硅晶体的直径,还可以有效抑制外界扰动与时滞变化带来的影响。文[20]提出一种基于LSTM的滚动预测方法对电缆的缆芯温度进行短期温度预测,并且取得了很好的效果。目前基于深度学习的LSTM已经成功应用到多个工程领域。
本文基于上述研究工作,将广义预测控制方法、数据驱动控制以及深度学习相结合,提出了一种非线性广义预测切换控制方法。针对未建模动态的未知增量,采用LSTM进行智能估计,从而设计了基于LSTM估计的非线性广义预测控制器;在此基础上,对所提的新的控制算法进行了稳定性和收敛性分析。最后利用实验结果说明了所提方法的有效性。
1 控制问题描述一类工业过程的动态系统模型可描述为

|
(1) |
其中,k为采样时间,φ(k)是维数为nA+nB+1的数据向量,定义为
|
f(·)∈ 
由于系统一般都在工作点附近运行,假设原点为其工作点,故将式(1)在原点附近展开为等价模型:

|
(2) |
其中,A(z-1)和B(z-1)分别可以表示为

|
(3) |

|
(4) |

|
(5) |

|
(6) |
类似于文[5],v(φ(k))可等价表示为

|
(7) |
其中,Δ=1-z-1,z-1为延迟算子,Δv(φ(k))是未知增量。
由式(2)和式(7),可将系统(2)进一步表示为

|
(8) |
假设1 对于任意时刻的k,Δv(φ(k))满足线性增长条件,即:

|
控制目标为设计广义预测控制器使闭环系统的输入与输出信号有界,并使系统的输出渐近跟踪预先给定的有界参考信号。
2 非线性广义预测控制算法 2.1 广义预测控制器本文主要依托广义预测控制和基于深度学习技术的未建模动态增量估计算法对控制器进行设计。为了获得j步的超前预报,引入2个Diophantine方程:

|
(9) |

|
(10) |
其中,Ej(z-1)、Fj(z-1)和Gj(z-1)、Hj(z-1)都是由j、A(z-1)和B(z-1)所确定的多项式,且:
|
引入性能指标:
|
(11) |
其中,N1、N2分别为预测时域长度和控制时域长度,λj为控制加权系数,rj为加权常数,w(k)为参考输入信号。
广义预测控制算法通常采用滚动优化的方式设计控制器。在每一个时刻,只保留该控制序列的第一项u(k)作用于被控对象,u(k+1),…,u(k+N2-1)完全忽略,在第k+1时刻,可以获得k+1时刻到未来长度为N2的控制序列u(k+1),…,u(k+N2),同理,在k+1时刻,只保留该控制序列的第一项u(k+1)作为控制输入作用到被控对象,并重复上述过程以实现滚动优化和反馈矫正的目的。
类似于文[2]的方法容易得到广义预测控制器方程为
|
(12) |
其中,

|
化简式(12)可将非线性控制器u(k)表示为
|
(13) |
其中,
|
将式(13)代入到式(8)可得闭环系统方程:
|
(14) |
由闭环系统方程(14)可知,首先须保证闭环系统稳定,即:

|
同时为了尽可能地减小y(k+1)与w(k+1)之间的误差,可通过设计H(z-1)和E(z-1)来减小未建模动态对系统输出的影响,令:

|
当未建模动态变化较小时,可设计出线性控制器:
|
(15) |
考虑在系统的阶次nA和nB已知但组成多项式A(z-1)和B(z-1)的系数未知时的自适应控制算法。首先利用后移算子z-1可将式(8)改写为
|
(16) |
并定义数据向量φ(k)与参数向量θ为
|
(17) |
通过式(16)和式(17)可得系统的参数辨识方程:

|
(18) |
其中,

|
(19) |
表示在k时刻对参数θ的估计;下标1表示采用式(20)~式(22)的辨识算法,本文采用改进的投影算法[17-18]进行辨识:

|
(20) |
|
(21) |
辨识误差为
|
(22) |
线性广义预测自适应控制器为

|
(23) |
控制器中的






|
(24) |
与
|
(25) |
在线计算得到,其中
LSTM神经网络是由HOCHREITER和SCHMIDHUBER在1997年以循环神经网络(RNN)为基础提出的一种可以更有效解决时间序列预测任务的神经网络[21]。虽然RNN已经证明在时间序列预测任务是有效的,但是随着数据序列的增长和神经网络层数的增加,导致其在梯度传播时,引起梯度爆炸或梯度消失等一系列问题。而LSTM神经网络作为改进的循环神经网络,通过引入细胞状态门对过去的状态进行过滤,通过选择保留对当前状态影响更大的并遗忘作用较小的数据,避免了RNN中存在的长期依赖问题(系统当前状态可能受很长时间之前的系统状态影响)和梯度爆炸或消失问题。
如图 1所示,LSTM神经网络是在RNN神经网络的基础上增添了细胞状态(cell state),并依靠其特有的门控单元来解决长期依赖问题,即输入门(input gate)、遗忘门(forget gate)、输出门(output gate)在预估未建模动态增量时,传统的BP神经网络只考虑到当前时刻的输入输出进行预测,传统的递归神经则是全部的输入输出,而LSTM神经网络在估计未建模动态增量时会抓取数据序列中的时间特征,不仅需要考虑到当前时刻的信息,也判断历史信息是否会对该时刻的输出产生影响,因此LSTM在时间序列建模方面优势明显。

|
| 图 1 LSTM神经网络结构 Fig.1 LSTM neural network structure |
由于当前时刻的未建模动态增量未知,因此可使用LSTM建立其估计模型,从而得到带有未建模态增量估计的非线性系统参数辨识方程为

|
(26) |
其中,

|
(27) |
表示在k时刻对参数θ的估计,在辨识过程中将采用与式(20)~式(22)相似的辨识方法,采用下标2来表示;
下面介绍基于LSTM的未建模动态估计算法。由式(8)可得k时刻未建模动态增量Δv(φ(k))的导师信号为

|
(28) |
LSTM神经网络和传统的神经网络一样,其算法主要包含前向传播和反向传播两个部分算法。在前向传播过程中,LSTM的细胞状态作为中间状态,该输入包含2个部分:一部分为上一时刻的输出hk-1;另一部分为当前时刻的网络输入,记为xk:

|
首先对数据进行预处理,然后将处理完毕的数据作为输入层的输入数据向量,记为xk。通过对当前时刻的输入xk与上一时刻的输出hk-1经过激活函数(sigmoid)后,得到该时刻遗忘门的输出,记为fk。该输出的范围在[0, 1]之间,其含义为对上一时刻细胞状态Ck-1中信息的保留到Ck中的数量,其k时刻遗忘门可表达为
|
(29) |
其中,Wf是遗忘门的权重矩阵,bf是遗忘门的偏置项,σ是sigmoid的激活函数。
对于输入门则分为两个部分,其中一部分为输入门,记为ik;另一部分为输入调制门,记为
|
(30) |
|
(31) |
其中,Wi、
输入门的主要作用与遗忘门的作用相同,用来决定当前时刻有多少信息需要更新到细胞状态Ck中。然后由遗忘门和前一时刻的细胞状态Ck-1与输入门和当前时刻的细胞状态
|
(32) |
k时刻的最终输出是细胞状态与输出门共同决定,输出门的表达式为
|
(33) |
其中,Wo是输出门的权重矩阵,bo是输出门的偏置项。
最终k时刻的预测结果
|
(34) |
预测误差通过反向传播算法调整各门的权重项和偏置项等。该算法一共分为两个部分,一部分通过计算每一个神经元的误差项并传递给上一层;另一部分则是从k时刻开始沿时间反向计算每一时刻的误差,并根据相应的误差重新计算以更新每个梯度。
引进损失函数,记为L(k):
|
(35) |
其中,hk为对应时刻的未建模动态增量归一化后的真实值,并作为该时刻的导师信号。在反向传播算法中主要通过式(36)和式(38)及损失函数进行求解,同时加入两个新的变量,分别为本层梯度误差δh(k)和反向梯度误差δC(k),分别定义为式(36)和式(37):

|
(36) |

|
(37) |
其中,反向梯度误差δC(k)是由前一层δC(k+1)的梯度误差和本层

|
(38) |
通过式(36)和式(38)可以求得权重矩阵Wf的梯度和偏置项bf的梯度分别为
|
(39) |
|
(40) |
其他的权重矩阵的梯度和偏置项的梯度求法与式(39) 和式(40)的计算方法类似。
由于估计值

由LSTM的万能逼性可知,eh(k) 满足:

|
其中,ξh(ξh>0)为预先设定的误差界。同时将得到的


|
(41) |
通过辨识得到

|
(42) |
其中,


|
(43) |
|
(44) |
上述线性广义预测控制器(23)以及基于LSTM的非线性广义预测自适应控制器(42)通过切换函数来协调被控对象,既保证闭环系统的稳定性,又能实现良好的控制性能,其中切换函数为
|
(45) |

|
(46) |
当m=1时,线性广义预测自适应控制器(23) 作用于被控对象,e1(k)是线性模型辨识误差;当m=2时,基于LSTM的非线性广义预测自适应控制器(42) 作用于被控对象,e2(k)是非线性辨识模型的误差,N是正整数,c≥0是一个常数。
对任意时刻k,切换机制选择最小的切换函数所对应的控制器作用于被控对象,即:

|
(47) |
如果J*(k)=J1[k,e1(k)],那么选择u1(k)作用于被控对象;如果J*(k)=J2[k,e2(k)],那么选择u2(k)作用于被控对象。
3 稳定性和收敛性分析闭环切换系统的稳定性和收敛性分析需要首先建立如下引理。
引理1 闭环系统的输入方程和输出方程为
|
引理2 参数辨识算法式(20)~式(22)有如下性质:
1) 
2) 
3) 
非线性广义预测控制器参数辨识算法由如下性质:
4) 
5) 
当线性辨识算法和非线性辨识算法以及切换控制满足引理1和引理2时,闭环切换系统有特征:
1) 闭环系统BIBO(bounded input bounded output)稳定:

|
2) 稳态误差的绝对值小于预先给定值ε(ε>0):

|
为了说明本文所提方法的有效性,使用离散时间非线性动态系统作为仿真实验,并与文献中已有的方法进行对比,实验结果说明了所提方法的有效性。该动态系统为
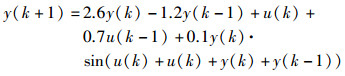
|
(48) |
系统阶次分别为nA=2,nB=1,系统的参数多项式分别为
|
数据向量为

|
v(φ(k-1))通过历史数据间接获得,Δv(φ(k))通过使用深度学习技术的LSTM神经网络估计产生。
控制目标为设计广义预测切换控制使闭环系统得输出y(k)跟踪有界参考信号w(k)=3sgn(sin(πk/50))。仿真结果如图 2~图 6所示。

|
| 图 2 采用本文算法时参考输入w(k)与闭环输出y(k) Fig.2 Reference input w(k) and closed-loop output y(k) when using the proposed algorithm |

|
| 图 3 输入u(k) Fig.3 The input u(k) |

|
| 图 4 采用BP神经网络预测未建模动态增量时系统的参考输入w(k)与闭环输出y(k) Fig.4 Reference input w(k) and closed-loop output y(k) when using BP neural network to predict the increment of the unmodeled dynamic |

|
| 图 5 采用BP神经网络时的系统的输入u(k) Fig.5 The input u(k) of the system when the BP neural networks is used |

|
| 图 6 换序列 Fig.6 Witching sequence |
图 2~图 3为采用基于深度学习技术的非线性广义预测切换控制方法的输入和输出,从图中可以看出,闭环系统是稳定的,并且实现了较好的跟踪效果。
图 4~图 5采用基于BP神经网络的非线性广义预测切换控制方法的控制性能,从图中可以看出系统能较好地跟踪参考信号,输入信号在开始阶段有较大的波动,但逐渐趋于稳定。
比较图 2和图 4可以看出,采用两种方法时,闭环系统的输出都能跟踪上参考输入信号,使用LSTM估计未建模动态的方法比使用BP神经网络时,系统的收敛速度快。
图 6为算法的切换序列。
表 1是采用两种不同的方法时系统输入和输出的幅值情况。从表 1不难看出带有未建模动态未知增量补偿的方法的输出波动更小,同时在大约50步之后使用LSTM的收敛速度也要优于使用BP神经网络的情况。
| 幅值比较 | LSTM | BP网络 |
| umin | -2.186 7 | -6.633 8 |
| umax | 1.981 0 | 3.604 8 |
| ymin | -3.694 6 | -3.574 2 |
| ymax | 3.693 8 | 4.855 4 |
本文针对一类离散时间非线性动态系统,提出一种新的非线性广义预测自适应切换控制算法。该算法有效的利用了非线性项的历史数据,同时对未建模动态增量使用LSTM神经网络进行预估,设计了带有未建模动态增量补偿的非线性自适应广义预测控制器,提高了系统性能。通过数值仿真对比实验,说明了所提方法的有效性。
| [1] |
CHEN L J, NARENDRA K S. Nonlinear adaptive control using neural networks and multiple models[J]. Automatica, 2001, 37(8): 1245-1255. DOI:10.1016/S0005-1098(01)00072-3 |
| [2] |
ZHANG Y J, CHAI T Y, HONG W, et al. An adaptive generalized predictive control method for nonlinear systems based on ANFIS and multiple models[J]. IEEE Transactions on Fuzzy Systems, 2011, 18(6): 1070-1082. |
| [3] |
柴天佑, 张亚军. 基于未建模动态补偿的非线性自适应切换控制方法[J]. 自动化学报, 2011, 37(7): 773-786. CHAI T Y, ZHANG Y J. Nonlinear adaptive switching control method based on unmodeled dynamics compensation[J]. Acta Automatica Sinica, 2011, 37(7): 773-786. |
| [4] |
CHAI T Y, ZHANG Y J, WANG H, et al. Data-based virtual unmodeled dynamics driven multivariable nonlinear adaptive switching control[J]. IEEE Transactions on Neural Networks, 2011, 22(12): 2154-2172. DOI:10.1109/TNN.2011.2167685 |
| [5] |
张亚军, 牛宏, 柴天佑. 数据与未建模动态驱动的非线性PID切换控制[J]. 控制理论与应用, 2020, 37(3): 481-491. ZHANG Y J, NIU H, CHAI T Y. Data-based un-modeled dynamics driven nonlinear PID[J]. Control and Decision, 2020, 37(3): 481-491. |
| [6] |
牛宏, 陶金梅, 张亚军. 一种新的数据驱动的非线性自适应切换控制方法[J]. 自动化学报, 2020, 46(11): 2359-2366. NIU H, TAO J M, ZHANG Y J. A new data-driven nonlinear adaptive switching control method[J]. Acta Automatica Sinica, 2020, 46(11): 2359-2366. |
| [7] |
NIDOZI I, RAHMANI M. LMI-based model predictive control for switched nonlinear systems[J]. Journal of Process Control, 2017, 59(9): 49-58. |
| [8] |
ZHANG L, ZHANG Y, WANG D, et al. Multiple models generalized predictive control for superheated steam temperature based on MLD model[C]//IEEE International Conference on Automation & Logistics. Piscataway, USA: IEEE, 2007: 2740-2743.
|
| [9] |
FOROUZ B S, SEDIGH A K, MANZAR M N. Multiple model unfalsified adaptive generalized predictive control based on the quadratic inverse optimal control concept[J]. Optimal Control Applications and Methods, 2021, 42(3): 769-785. DOI:10.1002/oca.2700 |
| [10] |
陶金梅, 牛宏, 张亚军, 等. 基于随机配置网络的非线性系统智能建模方法[J/OL]. 控制与决策, 2022, 37(10): 2559-2564. TAO J M, NIU H, ZHANG Y J, et al. An intelligent modeling method for nonlinear systems based on random Configuration networks[J/OL]. Control and Decision, 2022, 37(10): 2559-2564. |
| [11] |
TONG S C, SUI S, LI Y M. Observed-based adaptive fuzzy tracking control for switched nonlinear systems with dead-zone[J]. IEEE Transactions on Cybernetics, 2015, 45(12): 2816-2826. DOI:10.1109/TCYB.2014.2386912 |
| [12] |
TONG S C, LI Y M. Adaptive fuzzy output feedback Control for switched nonlinear systems with unmodeled dynamics[J]. IEEE Transactions on Cybernetics, 2016, 47(2): 295-305. |
| [13] |
LI Y M, SUI S, TONG S C. Adaptive fuzzy control design for stochastic nonlinear switched systems with arbitrary switchings and unmodeled dynamics[J]. IEEE Transactions on Cybernetics, 2017, 47(2): 403-414. |
| [14] |
PAWLOWSKI A, CERVIN A, GUZMÁN J L, et al. Generalized predictive control with actuator deadband for event-based approaches[J]. IEEE Transactions on Industrial Informatics, 2014, 10(1): 523-537. |
| [15] |
ZHANG L X, ZHUANG S L, BRAATZ R D. Switched model predictive control of switched linear systems: Feasibility, stability and robustness[J]. Automatica, 2016, 67(1): 8-21. |
| [16] |
胡杰, 杜胜, 吴敏, 等. 铁前炉料制备过程先进控制与智能优化[J]. 信息与控制, 2018, 47(4): 411-420. HU J, DU S, WU M, et al. Advanced control and intelligent optimization of raw-materials preparation process in ironmaking[J]. Information and Control, 2018, 47(4): 411-420. |
| [17] |
郭冠呈, 刘书明, 李俊禹, 等. 基于双向长短时神经网络的水量预测方法研究[J]. 给水排水, 2018, 54(3): 123-126. GUO G C, LIU S M, LI J Y, et al. Study on water quantity prediction method based on bidirectional long and short time neural network[J]. Water & Wastewater Engineering, 2018, 54(3): 123-126. |
| [18] |
李爱莲, 张帅. 基于LSTM网络的焦炉火道温度预测建模仿真[J]. 计算机仿真, 2020, 37(6): 466-470. LI A L, ZHANG S. Modeling and simulation of coke oven tunnel temperature prediction based on LSTM network[J]. Computer Simulation, 2020, 37(6): 466-470. |
| [19] |
任俊超, 刘丁, 万银. 基于混合集成建模的硅单晶直径自适应非线性预测控制[J]. 自动化学报, 2020, 46(5): 1004-1016. REN J C, LIU D, WAN Y. Hybrid integrated modeling based adaptive nonlinear predictive control of silicon single crystal diameter[J]. Acta Automatica Sinica, 2020, 46(5): 1004-1016. |
| [20] |
孙俊峰, 李志斌. 基于LSTM的滚动预测算法的电缆缆芯温度的研究[J]. 电子测量技术, 2021, 44(21): 84-88. SUN J F, LI Z B. Research on cable core temperature based on rolling prediction algorithm of LSTM[J]. Electronic Measurement Technology, 2021, 44(21): 84-88. |
| [21] |
HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. |