



1 引言
近年来,多智能体系统的一致性问题在人工智能、 无人机协调控制、 城市交通控制等方面得到广泛的应用,从而受到众多国内外学者的关注,并取得了大量成果[1, 2, 3]. 一般来说,一致性是指网络连接下的多个智能体能根据其邻居节点更新信息,从而最终趋向于共同目标.
目前,在已有文献中,大部分的一致性协议是在相邻智能体之间保持连续通讯的基础上设计的,如文[4, 5, 6, 7]. 然而连续通讯模式是一种理想化的假设模型,连续的通讯过程需要一直占用通讯信道,并且也可能生成一些无用的信息. 相对于连续通讯,离散通讯则更为实际,能减轻通讯信道的负担,节约通讯资源. 另一方面,对一个智能体来说,应尽可能减少其控制器的更新次数,从而延长使用寿命. 针对这一问题,文[8, 9, 10, 11, 12]提出了基于事件驱动控制的一致性协议,其主要特征是控制器的更新时刻离散,并且由所给定的事件来决定. 另外,智能体之间可以非周期地传递信息,同时,网络中的任意两个智能体可以在不同时刻向邻居节点广播信息. 事件驱动控制在一致性问题中的有效性已被证明,如文[8]提出了基于事件驱动控制的集中式或非集中式一致性协议; 文[9]设计了一种新的基于采样的事件探测器,从而很好地实现了事件驱动控制下的多智能体一致性; 此外,文[10, 11, 12]研究了通讯存在时延情况下离散多智能体的事件驱动一致性问题等.
另外,非线性在自然科学和工程上普遍存在,通常在实际应用中,每个智能体本身是非线性系统,即拥有非线性特质,因此对于非线性多智能体的一致性研究更具有实际意义[13, 14]. 然而,用事件驱动控制方法研究非线性多智能体的一致性问题并未得到广泛的关注,相关研究成果并不丰硕. 文[15]虽然针对非线性多智能体提出了事件驱动的一致性协议,但所给事件最终会连续地被触发. 具有非线性特质的多智能体系统有丰富的动力学行为,为处理这一问题,本文将进一步研究非线性多智能体动力系统在事件驱动下的一致性问题. 首先考虑连接多智能体的网络为无向固定拓扑的情形,对于给定的一致性状态,设计出基于事件驱动的一致性协议,并推导出多智能体系统达到一致性的充分条件; 其次将结果推广到切换拓扑结构的网络中; 最后,给出数值仿真验证理论分析的正确性.
2 问题描述 2.1 预备知识图(graph)提供了一种用抽象的点和线表示各种实际网络的统一方法[16],可以通过研究抽象图而得到具体的实际网络的拓扑性质.
用图g=
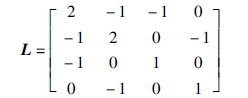
一般地,无向图g的邻接矩阵定义为A=(aij)N×N,aij=aji=1⇔(i,j)∈ε,否则aij=0. 本文考虑的无向图不含自环,即aii=0,i=1,2,…,N. 无向图g的拉普拉斯矩阵L=(Lij)N×N定义为
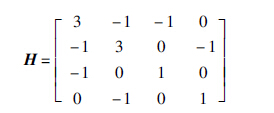
定义矩阵B=diag{b1,b2,…,bN},其中,bi≥0表示智能体i与领导者之间是否通讯,bi满足条件: 如果(s,i)是的一条边,bi=1; 否则,bi=0. 引入矩阵H=L+B,其中H=(hij)N×N满足:
引理1[18] (1) 矩阵H的特征值非负; (2)矩阵H是正定的,当且仅当图是连通的.
本文中所涉及到的其它数学符号如下: λN(H)代表矩阵H的最大特征值; λ1(H)代表矩阵H的最小特征值; 符号⊗代表矩阵的克罗内克乘积,如果A是一个m×n的矩阵,而B是一个p×q的矩阵,克罗内克积A⊗B则是一个mp×nq的分块矩阵; 上标“T”表示矩阵的转置; In∈Rn×n表示n阶单位矩阵; ‖·‖代表向量的欧几里得范数,即
网络中每个智能体的动力学行为用下面的方程来描述:
假设1 f为有界非线性函数,并且满足下面的Lipschitz条件:
定义1 如果对于任意初始值,智能体的状态满足
首先,考虑当网络拓扑结构无向并且固定(aij=aji且保持不变)时,多个智能体在事件驱动控制下达到一致性的充分条件. 本文中,假定充当领导者的智能体s∈Rn,其动力学行为满足如下方程:
注1 本文选择的领导者智能体是网络的一个平衡点,跟随者智能体的状态最终实现与领导者一致,相当于整个网络被控制到了平衡点状态. 目前,已有文献[19, 20, 21]研究了网络平衡点的存在性及用牵引控制等方法如何有效地将大规模的复杂动力网络控制到平衡点的问题.
基于事件驱动控制方法,设计一致性协议:
定义智能体i的测量误差向量为  aij,Lij=-aij(j≠i). 对无向图而言,拉普拉斯矩阵L是对称且半正定的,并且其特征值均为实数[17, 18].
aij,Lij=-aij(j≠i). 对无向图而言,拉普拉斯矩阵L是对称且半正定的,并且其特征值均为实数[17, 18]. 
 .
. 

 =0,i,j=1,2,…,N,则称智能体达到一致.
=0,i,j=1,2,…,N,则称智能体达到一致. 



进一步地,本文中定义第i个智能体的事件条件为


注2 如果满足上述条件(5),那么智能体i的事件不被触发; 否则,事件被触发,tik=t; 同时,智能体会把自身的即时状态信息(xi(tik))广播给它的邻居. 另外,当违反条件(5)时,由于xi(tik)=xi(t),测量误差向量δi(t)=0.
注3 由于事件条件(5)是非集中式的,因此任意2个多智能体的事件被触发的时刻可以是不相同的. 同时,对于网络中的任意一个智能体而言,其控制器的更新时刻是离散的,并且由所给定的事件(5)来决定.
对于多智能体系统(1),若能满足 ,则系统(1)实现一致.
,则系统(1)实现一致.
定义一致性误差为

下面给出多智能体系统(1)在事件驱动(2)下达到一致性的充分条件:
定理1 假定由系统(1)中N个智能体和领导者s所构成的网络是无向且连通的,则在事件驱动一致性协议(2)的作用下,N个智能体将会趋向于s,如果协议中的控制增益d满足:
证明 令:


 可得
可得

 <0,只要:
<0,只要:


 成立,从而定理1得证.
3.2 切换拓扑情况
成立,从而定理1得证.
3.2 切换拓扑情况
本节将考虑网络拓扑结构切换的情况下,基于事件驱动控制的非线性多智能体的一致性问题.
假设N+1个多智能体所组成的网络可能的拓扑结构集合为
 r(t),其中:
r(t),其中:

r(t)). 类似于定理1,可以推导出切换拓扑结构下多智能体事件驱动一致性的充分条件:
定理2 假定由系统(1)中N个智能体和领导者s所构成的网络是无向的,且每个切换拓扑结构下,网络都是连通的,则在事件驱动一致性协议(2)的作用下,N个智能体将会趋向于s,如果协议中的控制增益d满足:

r(t)))}. 证明过程类似于定理1,故省略.
注4 一般地,考虑切换拓扑结构的网络更为实际. 本文在固定拓扑情形下证明了事件驱动下非线性多智能体系统的一致性条件,并把相应结果推广到切换拓扑的情形. 然而,定理2中每个切换拓扑结构下网络连通是一个充分条件,如何拓宽对网络连通性的要求是本文进一步研究的方向.
4 数值仿真本节中,将通过一些具体数值仿真例子来验证本文理论结果.
例1(固定拓扑情形) 考虑由4个跟随者智能体和1个领导者所构成的网络,其拓扑结构如图 1所示. 智能体的非线性项由如下方程描述:
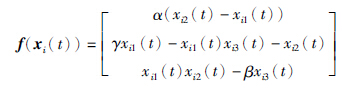
 ,γ=28,xi(t)=[xi1(t),xi2(t),xi3(t)]T∈R3,i=1,2,3,4. 选取智能体的初值为xi(0)=[i,5i,10i]T. 经过简单计算,发现领导者s=[8.485 3,8.485 3,27]T. 从图 1可以看出网络的拉普拉斯矩阵为
,γ=28,xi(t)=[xi1(t),xi2(t),xi3(t)]T∈R3,i=1,2,3,4. 选取智能体的初值为xi(0)=[i,5i,10i]T. 经过简单计算,发现领导者s=[8.485 3,8.485 3,27]T. 从图 1可以看出网络的拉普拉斯矩阵为
 |
| 图 1 通信拓扑图Fig. 1 Communication topology |
选择智能体的事件驱动器参数: σ1=0.05,σ2=0.045,σ3=0.035,σ4=0.04,满足σmax<1/λ2N(H)=0.054. 控制增益d=10,利用一致性协议(式(2))及事件条件(式(5)),可以得到智能体状态图与测量误差向量范数图,分别如图 2和图 3所示. 从图 2可以看出,非线性多智能体能在有限时间内达到所给的目标状态,从而实现了一致性. 图 3表明当事件触发时,测量误差向量范数 重置为0.
重置为0.
 |
| 图 2 智能体的状态演化图Fig. 2 Evolution diagram of state for each agent |
 |
| 图 3 智能体的测量误差向量范数演化图Fig. 3 Evolution diagram of the norm of the measurement error vector for each agent |
例2(切换拓扑情形) 考虑智能体构成的网络可能存在的3个切换拓扑结构,如图 4所示.
 |
| 图 4 切换拓扑图Fig. 4 Switching communication topology |
网络拓扑结构在仿真过程中发生切换,如[0,0.3)拓扑结构为1,[0.3,0.7)拓扑结构为2,[0.7,1)拓扑结构为3. 选择智能体的事件驱动器参数如下: σ1=0.035,σ2=0.04,σ3=0.045,σ4=0.042. 满足σmax<min{1/λ2N(H(r(t)))}=0.053. 控制增益d=10,得智能体的状态图如图 5所示(红色线、 绿色线、 蓝色线分别表示xi1、 xi2、 xi3智能体状态图,i=1,2,3,4),说明在切换拓扑情况下,智能体也很好地实现了一致性.
 |
| 图 5 智能体的状态演化图Fig. 5 State evolution diagram of each agent |
本文主要研究了在固定拓扑网络和切换拓扑网络情况下,非线性多智能体系统在事件驱动下达到一致性的问题,设计适当的事件触发条件,并提出基于事件的控制协议,利用李亚普诺夫稳定性理论,证明了如果控制增益满足一定的条件,则多智能体系统实现一致. 所提供的数值仿真验证了定理的有效性. 在今后的研究工作中,将着力于更多实际模型的一致性行为上,如考虑网络为有向、 无领导者的情形,领导者智能体具有时变轨迹的情形及时滞、 随机等因素对模型的影响,则更有普遍性,更有实际意义.
| [1] | Ren W. Multi-vehicle consensus with a time varying reference state[J]. Systems & Control Letters,2007,56(7/8): 474-483. |
| [2] | 欧海涛,张文渊,张卫东,等. 城市交通控制研究的新发展 [J]. 信息与控制,2000,29(5): 441-453. Ou H T,Zhang W Y,Zhang W D,et al. New trend toward urban traffic control[J]. Information and Control,2000,29(5): 441-453. |
| [3] | Baronchelli A,Díaz-Guilera A. Consensus in networks of mobile communicating agents[J]. Physical Review E,2012,85(1/2): 016113. |
| [4] | Zhu M H,Martínez S. Discrete-time dynamic average consensus[J]. Automatica,2010,46(2): 322-329. |
| [5] | Wang Y,Wu Q H,Wang Y Q,et al. Quantized consensus on first-order integrator networks[J]. Systems & Control Letters,2012,61(12): 1145-1150. |
| [6] | Yang S F,Cao J D,Lu J Q. A new protocol for finite-time consensus of detail-balanced multi-agent networks[J]. Chaos,2012,22(4): 043134. |
| [7] | Yang W,Wang X F,Shi H B. Fast consensus seeking in multi-agent systems with time delay[J]. Systems & Control Letters,2013,62(3): 269-276. |
| [8] | Dimarogonas D V,Frazzoli E,Johansson K H. Distributed event-triggered control for multi-agent systems[J]. IEEE Transactions on Automatic Control,2012,57(5): 1291-1297. |
| [9] | Meng X Y,Chen T W. Event based agreement protocols for multi-agent networks[J]. Automatica,2013,49(7): 2125-2132. |
| [10] | Chen X,Hao F. Event-triggered average consensus control for discrete-time multi-agent systems[J]. IET Control Theory & Applications,2012,16(6): 2493-2498. |
| [11] | Liu Z X,Chen Z Q,Yuan Z Z. Event-triggered average-consensus of multi-agent systems with weighted and direct topology[J]. Journal of Systems Science and Complexity,2012,25(5): 845-855. |
| [12] | Seyboth G S,Dimarogonas D V,Johansson K H. Event-based broadcasting for multi-agent average consensus[J]. Automatica,2013,49(1): 245-252. |
| [13] | Liu K E,Xie G M,Ren W,et al. Consensus for multi-agent systems with inherent nonlinear dynamics under directed topologies[J]. Systems & Control Letters,2013,62(2): 152-162. |
| [14] | Yu W W,Ren W,Zheng W X,et al. Distributed control gains design for consensus in multi-agent systems with second-order nonlinear dynamics[J]. Automatica,2013,49(7): 2107-2115. |
| [15] | Yin X X,Yue D. Event-triggered consensus of nonlinear multi-agent systems with nonlinear interconnections[C]//Proceedings of the 32nd Chinese Control Conference. Piscataway,NJ,USA: IEEE,2013: 7087-7092. |
| [16] | Godsil C,Royle G. Algebraic graph theory[M]. New York,USA: Springer-Verlag,2001. |
| [17] | Li Z,Ren W,Liu X. Consensus of multi-agent systems with general linear and Lipschitz nonlinear dynamics using distributed adaptive protocols[J]. IEEE Transactions on Automatic Control,2013,58(7): 1786-1791. |
| [18] | Ni W,Cheng D Z. Leader-following consensus of multi-agent systems under fixed and switching topologies[J]. Systems & Control Letters,2010,59(3/4): 209-217. |
| [19] | 沈轶,聂强. 神经网络平衡点存在唯一的充要条件 [J]. 应用数学,2004,17(1): 160-163. Shen Y,Nie Q. Sufficient and necessary conditions for existence and uniqueness of equilibrium point of neural networks[J]. Mathematica Applicata,2004,17(1): 160-163. |
| [20] | Hu A H,Xu Z Y. Pinning a complex dynamical network via impulsive control[J]. Physics Letters A,2009,374(2): 186-190. |
| [21] | Lu X B,Wang X F,Fang J Q. Controlling a complex dynamical network to attain an inhomogeneous equilibrium[J]. Physica D,2010,239(7): 341-347. |