



2. 山东英才学院, 山东 济南 250104
2. Shandong Yingcai University, Jinan 250104, China
1 引言
目前,动态场景中事件的检测与识别已成为交通视觉监视领域的研究热点. 而要检测并识别动态交通场景中的事件,其基本前提就是准确地表达交通场景中动态事件的语义,使其能够被计算机自动识别和处理,并自动转换成符合人类认知的场景信息. 因此,研究动态交通场景中事件的语义表达方法可为交通管理与控制的智能化发展提供理论与技术支持,具有现实意义.
国内外学者已经做了大量关于交通场景中事件语义表达的研究. 国外,为了分析和识别车辆行为,文[1]利用自然语言描述复杂交通场景中车辆的运动模式; 为了测量交通事件中概念的语义相似度,文[2]利用概念状态向量(conceptual status vector,CSV)和加权语义间隔(weighted semantic distance,WSD)来区分不同的概念,当2个概念状态向量之间的语义间隔大于临界值时,交通事件就会发生; 文[3]利用基于车辆位置信息的语义描述方法检测交叉口处不同车辆的交互行为; 文[4]借用车载视觉传感器和数字地图获得的数据对特定的交叉口进行场景理解; 为了准确实时地描述交通事件演化过程,文[5, 6, 7, 8]对场景对象运动状态模式识别进行了深入研究,并给出了相应的实时识别算法.
国内,文[9, 10, 11, 12, 13]主张从定量角度出发,利用基于视频的多种图像处理技术来自动识别复杂交通场景中的事件. 定性表示方面,康维新等将交通事件抽象成HMM(hidden Markov model)模型,并将自然约束语言(natural constraint language,NCL)逻辑化,提出事件的语义描述形式[14]; 胡宏宇等认为交通事件的发生和发展是基于场景中的上下文信息的[15]; 楼建光等从4个层面分析交通事件的语义: 信息感知、 信息概念化、 信息形式化及自然语言语句生成[16]; 吴东晖等认为道路场景理解必须能够处理不确定性信息,并提出了一种基于不确定性知识推理的场景理解方法[17].
以上研究的视点大多关注在根据一定的约束规则对交通场景中的事件进行语义描述,其研究方法过度地依赖特定的事件类型,不具有一般性和通用性. 然而,要准确地表达动态交通场景中事件的语义,仅对场景中事件表达的显性语义进行客观地描述是不够的,还需要通过一定的推理挖掘事件表达的隐性语义. 而基于本体的描述逻辑语言具有良好的推理和表达能力,其推理算法总能终止,并输出正确的结果. 另外,描述逻辑公理类似于人类语言,有严格的框架,这使其在表达不同场景中的事件时具有通用性.
为此,本文提出一个动态交通场景中动态事件语义表达的新方法,旨在描述车辆的运动状态变化过程. 首先,将动态交通场景中的观察区域用不同的概念标记并分类. 然后,将动态交通场景中所有相关概念汇集到基于本体的层次结构中,并利用描述逻辑语言描述交通场景中的公理性和事实性的先验知识,再借助描述逻辑良好的推理能力来分析和表现动态交通场景中事件发生和发展的特性.
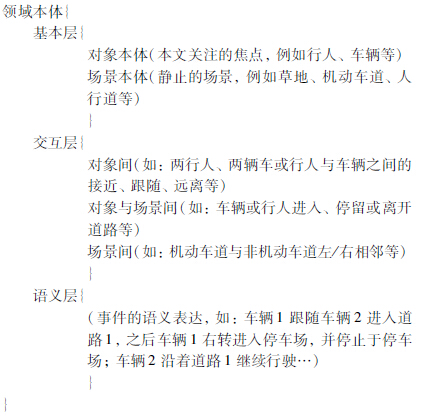
2 领域本体的创建本体是指利用概念性词汇描述某一个或某些领域相关信息的知识体. 一个定义明确、 结构合理的本体对于知识的表达和共享起着非常重要的作用. 为使本体的层次更加分明,结构更加合理,本文将其分为自下而上的3个层次(如图 1): 基本层、 交互层和语义层. 基本层表达了交通场景中所有基本概念及其关联信息,交互层描述了交通场景中所有的相互作用关系,语义层的任务是实现交通场景中事件的语义表达.
 |
| 图 1 本体的层次Fig. 1 Hierarchy of ontology |
要完成构建领域本体的任务,首先要概念化场景中的事件. 也就是说,在一个被观察的动态交通场景中,对场景的不同区域、 静止或移动的对象用不同的概念进行标记,然后依据这些概念及其相互关系表达事件的语义. 由此可见,交通场景中所有的概念、 规则及领域内的相关信息能否用一个统一形式进行定义和构建是动态交通场景中事件语义表达的关键.
为了概念化交通场景中的事件,本文将被观察的交通场景划分为标记具有不同属性的相邻区域,比如草地(Grassplot)、 道路(Road)、 人行横道(Sideway)等. 在交通动态场景中,移动的对象是关注的焦点. 然而,与静态场景描述相比,要清晰地表达移动对象的相关信息是一件困难的事情,其原因在于难以确定表达移动对象运动状态的动词.
为此,本文将表达移动对象状态的动词概念化. 例如: 某个对象的运动状态包括移动(Move)、 暂停(Halt)、 停止(Stop)等; 移动对象的轨迹可以分为: 直行(GoStraight)、 右转(TurnRight)、 左转(TurnLeft)等; 两个移动对象之间的关系可以是接近(CloseTo)、 远离(AwayFrom)、 跟随(Follow)等. 为将所有相关概念融合到一个统一的结构中,本文参考Badler[18]提供的描述交通场景动词的方法,并在此基础上给予适当补充. 交通动态场景中的相关概念及动词分类如表 1所示.
| 类别 | 动词 |
| 车辆 行人 | Run,Arrive,Depart,Pass,Park,Turn,Retrace,etc. Move,Stop,Turn(Left/Right/West/East),Retrace,etc. |
| 交互 行为 | Follow,Parallel,Meet,Cross,Approach,Overtake,etc. |
| 场景中 的运动 | Stay,Pass,Reach,Leave,Along,Enter,Come out,etc. |
表 1给出了描述移动对象运动状态的一些动词. 可是,如何选择适当的动词来表达动态场景中的概念(即如何将轨迹数据与相应概念融合)才是准确表达移动对象运动状态的关键. 为此,首先举例说明如何将2个动词“Move”和“Stop”与其轨迹数据相融合.
图 2展示了一个场景中有2个移动对象的情景,分别用m和n标记. 每个移动对象的运动状态(移动、 停止、 直行、 左转、 右转等)是相互独立的. 因此为出现在场景中的每个对象建立了一个以对象初始位置为原点的局部坐标系统,并由式(1)表达移动对象的轨迹:





 |
| 图 2 不同坐标下的移动对象Fig. 2 Moving objects in different coordinates |
但是,当分析移动对象间的交互影响时,应该将所有移动对象放在同一个坐标系下考虑(如图 2中m与n的交互关系). 在此坐标系下,通过考虑对象的空间位置和对象间的相对距离,可以获得一系列表达对象间交互作用的动词概念. 如图 2中,在ti时刻对象m与n之间的距离为dti; 在ti+Δt时刻两者之间的距离为dti+Δt,并且dti>dti+Δt. 因此,经过Δt时间后,m与n完成“CloseTo”这个动作. 其它的概念也可以依据基本变量的变化获得,如通过分析θti的变化可以得到移动方向为

另外,交通场景中的不同区域之间存在着静态的拓扑关系. 例如,图 3显示了某交通场景中不同区域之间的相邻关系. 图 3(a)是用固定照相机拍摄的道路场景的不同区域图片; 图 3(b)划定道路场景中每个区域的界限,并用1,2,3,…分类标记,如Road区域标记为2和9,Sideway区域标记为4和6等; 而且不同类型区域的特性由先验知识获得,如标记为Sideway的区域只允许行人步行,标记为Grassplot的区域上禁止任何对象进入; 图 3(c)定义9个节点用以表示9个区域,并且节点之间的连线表示这些区域之间的相邻关系. 彩色节点表示的区域允许对象在其内部移动,并且着色的连线表示2个相邻节点之间的移动对象可以互换位置. 另外,在这个场景中移动对象各自遵守以上既定规则,如任何车辆禁止在Grassplot上行驶. 于是在编码时,既定规则可以根据图形拓扑关系反映的先验知识来设置约束条件.
 |
| 图 3 区域间的拓扑关系Fig. 3 Topological relationship of the regions |
综上所述,本文将交通场景中的所有区域划定界限并分类标记,并将所有场景元素以及表达移动对象状态的动词概念化. 这样,所有的概念、 规则及领域内的相关信息就可以用统一形式定义和构建,有利于准确清晰地表达动态交通场景中事件的语义.
2.2 基于分层概念的模型本体的建立由于语义的分层表达接近人类认知过程,因此为使人类能准确地理解动态交通场景中事件的语义,有必要建立一个以分层本体为基础的概念模型. 另外,人类对信息的整个认知过程需要经过几个不同的认知水平才能完成. 在较低水平上,人类是以触觉、 视觉、 听觉为基本特征提取信息的,这与本文从场景中提取概念并形成本体基本层的想法类似; 在较高水平上,人类的大脑将这些基本特征统一起来,并判断这些特征之间的联系,这与本体的交互层对概念间相互关系的表达十分相似; 而在最高水平上,人类大脑通过一定的推理判断,可以获得信息的隐含语义,这与本体的语义层对事件的语义表达相近.
综上所述,要想使事件的语义表达符合人类的认知过程且易于理解,基于分层概念模型建立本体显得尤为重要. 为此,本文依据道路交通的基本特性建立了如表 2的本体. 该本体被分为自下而上的3个层次: 基本层、 交互层和语义层. 基本层表达了交通场景中所有基本概念及其相关信息,交互层描述了交通场景中所有的相互作用关系,语义层的任务是实现交通场景中事件的语义表达.
构建领域本体之后,如何准确描绘交通场景中对象之间或者对象与外界环境之间的相互作用关系,即本体交互层的表达对动态场景中事件的语义表达至关重要. 为此,本文利用描述逻辑良好的表达和推理能力来表达这些相互作用关系. 描述逻辑是变量的1阶逻辑片段,相比其它形式,它有以下几个优势:
(1) 描述逻辑语言是可定义的,这意味着存在合理的、 完整的和终止的算法. 这比满1阶逻辑或含有函数符号的表达式有更明显的优势.
(2) 描述逻辑公理类似于人类语言,易于理解.
(3) 描述逻辑有严格的框架,能形成一个结构合理的知识库,从而解决了人与机器,机器与机器交流时语义含糊不清的问题.
3.1 描述逻辑语言的基本构成描述逻辑语言是利用概念、 角色和断言进行知识建模的. 其语法规则如下:
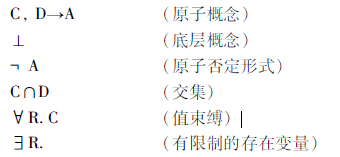
例如,若假设Road和Highway是两个原子概念,那么,Road∩Highway和Road∩¬Highway就是描述逻辑语言描述的2个概念,其意思是: 一些道路是公路,而另一些道路不是公路.
另外,如果假设running是一个原子角色,可以使用概念Car∩∃≥1 running. 和Car∩ ∀ running.Black表示至少有1辆汽车处于行驶状态,以及所有正在行驶的黑色汽车. 对底层概念的使用,也可以用Car∩∀running.⊥,描述没有正在行驶的汽车.
3.2 描述逻辑对概念间相互关系的表达如图 4所示,为了描述场景元素的相对空间拓扑关系,本文引用区域连接演算(region connection calculus,RCC)理论[19]中RCC8表达的8种空间拓扑关系作为描述逻辑语言中的原子角色,其中{DC、 PO、 EC、 TPP-、 TPP、 NTPP-、 NTPP、 EQ}分别表示{相离、 交叠、 相切、 覆盖、 被覆盖、 包含、 被包含、 重合}. 本文采用如下形式描述道路场景中隐含的拓扑关系:

 |
| 图 4 空间拓扑关系Fig. 4 Spatial topological relations |
同理,如图 5所示,本文引用表达空间方向关系的锥形模型[20]来表达交通场景中的空间方向关系,其中8个方位分别用{South、 East、 North、 West、 Southwest、 Northeast、 Southeast、 Northwest}表示. 本文利用“动词+方向”和“has+方向+Neighbor”分别作为描述逻辑语言中表达车辆转向以及静态空间方向关系的原子角色,这样道路场景中所有的方向关系就可以用这些原子角色表示. 例如: Road⊆∀ has Southwest Neighbor. Sideway表示人行道在道路的西南边; Car∩∃=1 Turning West表示车辆正在向西转弯,等.
 |
| 图 5 空间方向关系Fig. 5 Spatial direction relations |
于是,可以将空间拓扑关系和空间方向关系相组合描述更复杂道路场景,如: Lane⊆∃ NTPP.(CarLane∩∃ has East Neighbor.(BicycleLane∩ ¬∃ has East Neighbor)),表示某机动车道的东边是自行车道,且自行车道的东边没有其它的车道. 其中NTPP和has East Neighbor都是描述逻辑中的原子角色,NTPP是表达拓扑关系的原子角色、 has East Neighbor是表达方向关系的原子角色. 根据这个原理,定义不同的原子角色就可以表达不同概念之间的各种空间关系.
4 应用分析 4.1 应用举例在交通监视领域,动态交通场景中事件语义分析的基本任务是探测和跟踪移动对象,确定并描绘出它们之间或者它们与外界环境之间的特殊关系,表达并分析在这个动态场景中的事件的变化,为交通管制提供理论与技术支持.
本文首先采取以上场景中所有相关概念的提取方法,并分层汇集成本体,然后利用描述逻辑语言表达不同概念间的相互关系. 接下来重点阐述如何利用描述逻辑进行推理,对动态交通场景中事件进行语义表达. 为实现动态交通场景中事件的语义表达,本文建立了一个摄像监视系统. 在这个系统中,摄像头被固定在观察区域的建筑物上及周边,所有视频信号被传送到计算机上进行处理. 为了减少从3D视图转换到2D视图时对视觉效果的影响,本文选择视频捕捉视野较开阔的区域拍摄所需视频图像. 移动对象的位置(轨迹曲线)可以从基于视频图像的平面坐标系中获得. 图 6展示了此系统的运作流程.
 |
| 图 6 系统流程Fig. 6 System process |
根据这个流程图,系统的输入数据是真实场景的视频图像及场景中的先验知识. 当在场景中有对象移动时,它们会被检测到. 然后,系统将自动地跟踪检测到的移动对象,并得到其运动轨迹,再根据其运动轨迹分析移动对象的运动状态. 然后,相关概念就自动地和这些移动对象关联起来. 最后,通过事件分析模块的推理获得移动对象的 语义表达. 另外,场景中对象之间的相互作用也可以利用描述逻辑语言通过事件分析模块获得.
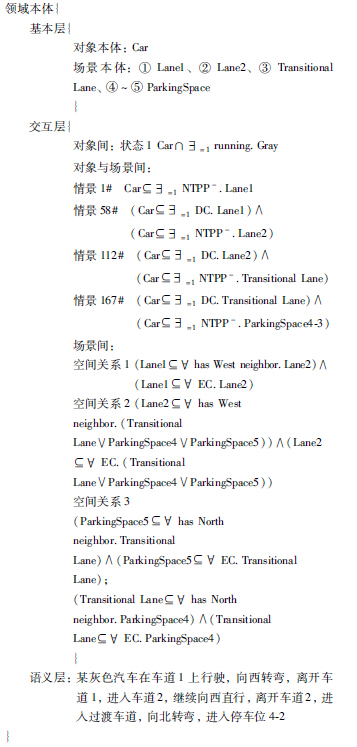
本文从某停车场视频录像中选取如图 7中的场景. 通过提取不同帧(时间尺度的长度设置为大约2 s(约50~60帧))图像中的相关概念,建立本体(见表 3).
 |
| 图 7 动态事件Fig. 7 Dynamic events |
表 3的推理过程如下:
首先,由空间关系1可知,Lane1的西边有Lane2,且两者相切; 由空间关系2可知,Lane2的西边有Transitional Lane、 ParkingSpace4和ParkingSpace5,且Lane2与三者分别相切; 由空间关系3可知,ParkingSpace5的北边是Transitional Lane且两者相切,Transitional Lane的北边是ParkingSpace4且两者也相切. 因此,可以推理出: Lane1与Lane2之间、 Lane2与Transitional Lane之间、 ParkingSpace5与Transitional Lane之间及Transitional Lane与ParkingSpace4之间是拓扑相邻的,且任意两者之间没有其它车道; 场景中自东向西依次是Lane1、 Lane2、 Transitional Lane,自南向北依次有ParkingSpace5、 Transitional Lane、 ParkingSpace4.
于是,场景中的事件推理如下:
(1) 状态1+情景1#
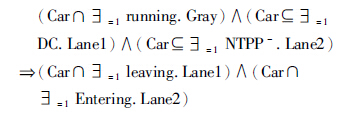
由状态1可知: 一辆灰色汽车处于运行状态. 而情景1#中,汽车位于车道1上. 因此,可以推理出一辆灰色汽车在车道1上行驶,即:

事件1#描述为: 一辆灰色汽车在车道1上行驶.
(2) 状态1+情景58#+空间关系1
由事件1#可知,一辆灰色汽车在车道1上行驶. 而在情景58#中,对象与场景之间有如下关系: 汽车与车道1相离并且位于车道2上. 因此,可以推理出车辆驶离车道1并进入车道2,即车辆完成“Leave”、 “Enter”两个动作,其推理过程如下:
接下来要推理出车辆是如何驶离车道1并进入车道2的. 场景间的拓扑、 方位关系是: 车道2位于车道1的西边且两者相切. 因此,可以推理出车辆是经过车道1向西转弯进入车道2的,即车辆完成“Turn”这一动作,转弯方向为“West”,并且此时车辆在车道2上“GoStraight”,行驶方向同样为“West”,其推理过程为:
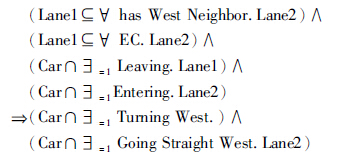
综上所述,推理出事件58#: 灰色汽车驶离车道1,向西转弯,进入车道2,并且在车道2上向西直行.
(3) 状态1+情景112#+空间关系2
由事件58#可知,车辆沿着车道2向西直行. 而由情景112#可知: 车辆与车道2相离,并且车辆位于过渡车道上. 因此可以推理出车辆完成了“Leave”、 “Enter”两个动作,其推理过程如下:
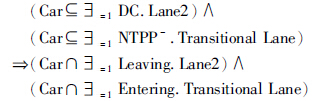
此外,还需要推理出车辆是如何进入过渡车道的. 由空间关系2可知: 过渡车道位于车道2的西边. 因此,车辆是沿着车道2继续向西行驶进入过渡车道的.
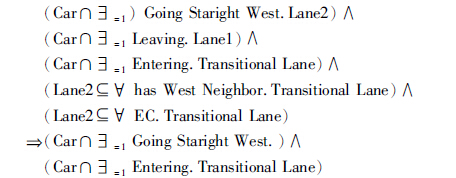
事件112#描述为: 灰色汽车继续向西行驶,驶离车道2,进入过渡车道.
(4) 状态1+情景167#+空间关系3
由事件112#可知: 灰色汽车进入过渡车道. 而情景167#中,汽车位于停车位4-2,因此可以推理出: 车辆离开过渡车道后进入停车位4-2,即车辆完成了“Leave”、 “Enter”两个动作,其推理过程如下:
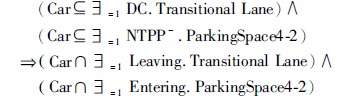
同样,要推理出车辆是如何驶离过渡车道并进入停车位4-2的. 场景间的拓扑、 方位关系: 停车位4位于过渡车道的北边且两者相切. 因此,可以推理出车辆是经过过渡车道向北转弯进入停车位4-2的,即车辆完成“Turn”这个动作,转弯方向为“North”,其推理过程为:
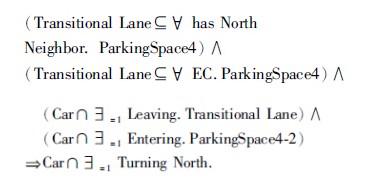
因此,事件167#描述为: 灰色汽车驶离过渡车道,向北转弯,进入停车位4-2.
4.2 动态性分析广义上讲,动词的不同时态可以表达对象在不同时间发生的动作,例如,本文中用动词的ing形式表达对象正在进行的动作. 为了使事件语义表达更准确,可以利用动词的过去时表达对象已经完成的动作,也可以利用动词的将来时表达对象即将发生的动作. 即利用动词的过去时、 现在时、 将来时分别表示车辆过去、 现在和将来发生的动作.
时序是描述动态性的非常重要的语义内容. 基于本体和描述逻辑的语言其实是一种时序逻辑语言. 它既能表达静态语义(本体),又能描述动态语义,因而适用于对动态事件的逐步求精、 抽象描述和验证. 其最重要的特色是能够用直言式逻辑公式表示出状态转换机制,即用公式化的逻辑表达式描述车辆行驶状态.
本文利用某停车场监控视频每隔2 s(约50~60帧)抽取一幅图片,并将抽帧后的帧序列编号为1#、 58#、 112#、 167#(如图 7)进行状态转移转换机制应用分析,利用本体和描述逻辑公理进行一致性推理、 分析车辆的状态转移机制,即在本文采用的方法中,事件的语义表达描述了一个移动对象在整个运动中不同阶段的运动状态. 如,在图 7所示的场景中,对一辆移动汽车的阐述连续地表达了这样的意思: 汽车在车道1上行驶,向西转弯,离开车道1,进入车道2,继续向西直行,离开车道2,进入过渡车道,向北转弯,进入停车位4-2. 在整个过程,汽车一直保持“Run”,但用来表达运动状态的动词不是固定词“Fun”,而是不断更新扩充为“Run”、 “Turn”、 “Leave”、 “Enter”、 “GoStraight”等表达具体动作的词汇,这一点体现出本文提出的基于本体分层概念的优势.
4.3 推理效率分析本体推理和描述逻辑推理的执行效率受建模的影响较大,而实际应用效果与推理执行效率密切相关. 已有工作[1, 2, 3, 4, 5, 6, 7, 8]主要关注于研究交通事件的识别与表达方法,往往忽略了所提表达方法以及推理的时效性问题.
本文所提方法在推理执行效率方面主要有以下优势:
(1) 并行推理技术是提高推理时效性的重要手段,而此推理技术基于分层结构. 为此,本文将复杂场景信息抽象提取、 简化成分层本体库,信息匹配及本体库调用时只需进行一致性检测即可,简化了推理过程; 并且本体库的基本层和交互层知识可以并行同时调用,提高了推理效率. 如,表 3推理过程2中,场景图片信息与本体库一致性匹配检测后得到: 只需同时并行调用基本层的概念(Car、 Lane1、 Lane2)及交互层的关系(状态1、 情景58#、 空间关系1)即可进行相应推理.
(2) 本文利用公式化的描述逻辑语言推理、 表达状态转移机制(车辆行驶状况). 为了提高推理效率,本文将描述逻辑的可满足性推理、 包含检测、 等价检测、 相离检测等全部转化为基于描述逻辑的一致性检测推理问题. 场景信息公式化时只需考虑对象间的空间拓扑和方向关系,公式表达形式简单明了; 推理时只需进行空间拓扑和方向关系的一致性推理,且描述逻辑推理算法总是能终止,避免了推理死循环的出现,提高了推理执行效率.
5 结论(1) 提出了一个基于本体的分层概念模型,将本体分为自下而上的3个层次: 基本层、 交互层和语义层.
(2) 提出了一个利用描述逻辑语言表达动态交通场景中动态事件的新方法. 该方法利用类似人类自然语言的描述逻辑语言来表达和推理动态场景中事件的语义,从而描述车辆的运动态势演化过程. 举例说明了新方法在动态场景事件语义表达及提高语义推理效率方面的优势.
(3) 本文对事件的语义表达未提出系统的语法及推理规则. 此外,基于时空关系的推理和不确定情况下的因果关系推理是应该考虑的另一个关键问题,这些工作在未来将会实现.
| [1] | Wu J,Cui Z,Chen J,et al. A survey on video-based vehicle behavior analysis algorithms[J]. Journal of Multimedia,2012,7(3): 223-230. |
| [2] | Xin L,Tan T. Ontology-based hierarchical conceptual model for semantic representation of events in dynamic scenes[C] //Proceedings of the 14th International Conference on Computer Communications and Networks. Piscataway,NJ,USA: IEEE,2005: 57-64. |
| [3] | Higgins R P. Automatic event recognition for enhanced situational awareness in UAV video[C] //Proceedings of IEEE Military Communications Conference. Piscataway,NJ,USA: IEEE,2005: 1-6. |
| [4] | Hummel B,Thiemann W,Lulcheva I. Scene understanding of urban road intersections with description logic[M] //Logic and Probability for Scene Interpretation. Dagstuhl,Germany: Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik,2008: 08091. |
| [5] | Alvarez J M,Gevers T,LeCun Y,et al. Road scene segmentation from a single image [M] //Lecture Notes in Computer Science: vol. 7578. Berlin,Germany: Springer-Verlag,2012: 376-389. |
| [6] | Mikic I,Cosman P C,Kogut G T,et al. Moving shadow and object detection in traffic scenes[C] //Proceedings of the 15th IEEE International Conference on Pattern Recognition. Piscataway,NJ,USA: IEEE,2000: 321-324. |
| [7] | Cucchiara R,Piccardi M,Mello P. Image analysis and rule-based reasoning for a traffic monitoring system[J]. IEEE Transactions on Intelligent Transportation Systems,2000,1(2): 119-130. |
| [8] | Haag M,Nagel H H. Combination of edge element and optical flow estimates for 3D-model-based vehicle tracking in traffic image sequences[J]. International Journal of Computer Vision,1999,35(3): 295-319. |
| [9] | 汤淑明,王坤峰,李元涛. 基于视频的交通事件自动检测技术综述[J]. 公路交通科技,2006,23(8): 116-121. Tang S M,Wang K F,Li Y T. Survey of vision-based automatic incident detection technology[J]. Journal of Highway and Transportation Research and Development,2006,23(8): 116-121. |
| [10] | 郁梅,王圣男,蒋刚毅. 复杂交通场景中的车辆检测与跟踪新方法[J]. 光电工程,2005,32(2): 67-70. Yu M,Wang S N,Li G Y. Method for detecting and tracking vehicles in complex traffic scene[J]. Opto-Electronic Engineering,2005,32(2): 67-70. |
| [11] | 关佩. 基于视频的交通事件自动检测[D]. 成都: 西南交通大学,2009. Guan P. Automatic incident detection based on video[D]. Chengdu: Southwest Jiaotong University,2009. |
| [12] | 赵业东. 基于图像的交通场景理解[D]. 长沙,中南大学,2013. Zhao Y D. Traffic scene understanding based on image[D]. Changsha: Central South University,2013. |
| [13] | 陶智敏. 基于视频的道路交通事件自动检测技术[J]. 道路交通与安全,2007,7(3): 38-41. Tao Z M. Automatic video detection technology for road traffic incident[J]. Road Traffic & Safety,2007,7(3): 38-41. |
| [14] | 康维新,曹宇亭. 交通事件的语义理解[J]. 应用科技,2013,40(2): 5-10Kang W X,Cao Y T. Semantic comprehension of traffic events[J]. Applied Science and Technology,2013,40(2): 5-10. |
| [15] | 胡宏宇,李志慧,曲昭伟,等. 基于上下文的交通事件表达与识别[J]. 吉林大学学报: 工学版,2009,39(S2): 157-161. Hu H Y,Li Z H,Qu S W,et al. Traffic event representation and recognition based on context[J]. Journal of Jilin University: Engineerring and Technology Edition,2009,39(S2): 157-161. |
| [16] | 楼建光. 路面车辆运动的语义理解[D]. 北京: 中国科学院自动化研究所,2004. Lou J G. Semantic understanding based onmoving vehicle on the road[D]. Beijing: Institute of Automation,Chinese Academy of Sciences,2004. |
| [17] | 吴东晖,叶秀清,顾伟康. 基于不确定性知识的实时道路场景理解[J]. 中国图象图形学报,2002,7(1A): 70-74. Wu D H,Ye X Q,Gu W K. An uncertain knowledge based real time road scene understanding algorithm[J]. Journal of Image and Graphics,2002,7(1A): 70-74. |
| [18] | Badler N I. Temporal scene analysis: Conceptual descriptions of object movements[R]. Toronto,Canada: University of Toronto,1975. |
| [19] | Cohn A G,Hazarika S M. Qualitative spatial representation and reasoning: An overview[J]. Fundamenta Informaticae,2001,46(1): 1-29. |
| [20] | 杨清渤. 定性空间表示和推理及其在定性导航中应用的研究[D]. 镇江: 江苏大学,2008. Yang Q B. Research on qualitative spatial representation and reasoning and its applicaction in qualitative navigation[D]. Zhenjiang: Jiangsu University,2008. |