



2. 中原工学院电子信息学院, 河南 郑州 450007
2. School of Electronic and Information Engineering, Zhongyuan University of Technology, Zhengzhou 450007, China
1 引言
结构化道路的车道线可以作为智能车辆自主行驶的一种重要参考行驶路径. 智能车辆的车道线保持就是自动地控制车辆在车道内的位置和行驶方向并跟随车道线行驶. 目前,针对车道线保持研究已有大量的成果. 文[1-7]分别采用模型预测控制、 Nested PID、 Fuzzy逻辑、 H∞、 自适应、 PID(proportional integral differential)控制算法实现车道线保持和车道保持协调控制. 文[8-11]分别集成转矩辅助控制、 主动前轮转向控制、 偏航角率主动前轮转向控制和状态反馈前轮转向控制以提高车道线保持控制功能和乘坐舒适性. 近几年,为提高车辆的稳定性和操纵性出现了多种车辆控制系统,例如车辆动态控制(VDC)、 电子稳定程序(ESP)、 车辆稳定辅助(VSA)、 直接横摆力矩控制(direct yaw moment control, DYC)等. DYC控制车辆的横摆率和滑移角,使得车辆在期望的方向和路径上行驶[12-13]. 传统的车道线保持控制尚未结合车辆的稳定性和操纵性控制. 四轮前后轮转向车辆具有提高车辆操纵稳定性和主动安全性的优点,其日益受到重视和接受. 文中,对四轮前后轮转向车辆的车道线保持问题进行研究. 结合四轮前后轮转向车辆的优点,为实现稳定车道线保持,提出了集成车辆直接横摆力矩和车道线保持的串级控制系统. 该系统在直接横摆力矩控制获得稳定车辆的滑移角和横摆率的基础上,控制车辆的横向位置偏差和航向角偏差最小,实现准确地跟踪车道线行驶. 在Matlab/Simulink环境下进行仿真研究,验证文中策略的有效性.

|
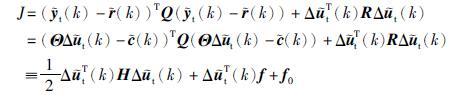
| 图 1 四轮前后轮转向车辆车道线保持模型 Figure 1 Lane keeping model of four steering vehicle with front and rear wheel |
四轮前后轮转向车辆模型[14],如图 1所示. 图 1中,车辆具有主动前后轮转向独立控制单元EPS,分别使用250 W直流电机作为EPS执行机构,分别控制两个前轮和两个后轮的转角. 车辆具有四轮独立制动力产生机构,产生所需横摆力矩. δf为前轮转角,δr为后轮转角,图 1中示意的前后轮转角为正值. GC为车辆的重量中心. af、 ar分别为车辆重量中心到前后轴的距离. ld为车轮间距离. Fx*和Fy*分别是车辆轮胎的纵向力和侧向力,这些受力产生车辆滑移角β、 纵向速度V和横摆率γ.
2.2 稳定车道线保持问题车道线保持控制示意图,如图 1所示. 车道弧线的半径为Rref,中心为M点. 车道线的曲率为ρref=1/Rref. 左转弯的曲率取正值,右转弯的曲率取负值. 过车道线圆弧圆点和车辆重量中心GC点交车道线于z点. yz表示z点到GC点的横向偏差. XoY为世界坐标系,xGCy为车体坐标. ψ为偏航角. ψd为z点切线与X轴旋转角度. 车道线控制使得横向位置偏差yz和航向角偏差Δψ(ψ-ψd)最小,准确地控制车辆跟踪车道线. 如图 1所示,驾驶员趋于驾驶车辆左转弯行驶示例,车辆为欠转向特性. 随着车辆的前行,车道半径(车道曲率增加)减小时,应增加前轮转角,否则,出现车辆欠转弯现象. 车辆稳定控制可以防止出现车辆欠转向现象,保证车辆在车道内行驶而不是驶出行驶车道. 传统的车道线保持控制尚未结合车辆的稳定性和操纵性控制. 文中的稳定车道线保持就是在车辆稳定性和操纵性基础上,再实现车辆在车道内准确地跟踪车道线、 保持行驶方向的车道内行驶. 图 1中所示的四轮前后轮独立转向结构适合实现文中稳定车道线保持. 集成车辆稳定性和车道线保持的控制系统设计成为文中需要解决的问题.
3 稳定车道线保持模型 3.1 车辆横摆力矩控制模型在车辆水平平面里,考虑横向运动和偏航运动两个自由度,取β、 γ和V为变量,两个自由度的运动方程分别为
横向运动方程为

|
(1) |
偏转运动方程为

|
(2) |
式中: m为车辆质量(kg),V为车辆速度(m/s),Iz为车辆垂直转动惯量(kg·m2),Fyf为作用于前轮的横向轮胎力,Fyr为作用于后轮的横向轮胎力(N),N为横摆力矩(N·m). 本车通过调节四轮上制动力产生所需的横摆力矩N.
考虑线性轮胎模型,横向轮胎力Fy*为
|
(3) |
式中:*∈[f r],βf、 βr为前、 后轮胎滑移角(rad),cf、 cr为前、 后轮胎侧偏刚度(N/rad).
假设β较小,则βf和βr计算式为
|
(4) |
将式(3)和式(4)代入式(1)和式(2),四转向2自由度运动车辆模型为
|
(5) |
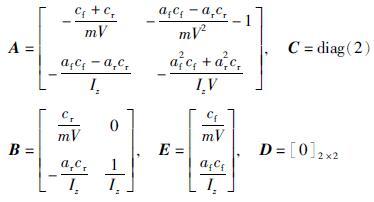
取状态向量x=[β γ]T,控制向量u=[δr N]T,式(5)的状态空间模型为
|
(6) |
式中:
|
该模型应包含车辆的速度和车辆的航向角及相对于跟踪车道线的传感器的横向位置. 参照图 1,yz的变化率为

|
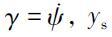
上式进一步线性化,得到yz的变化率为
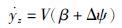
|
(7) |
式中: Δψ=ψ-ψd,S点为测量横向位置偏差的传感器安装点,ls为S点到GC点的距离,这里ls
|
(8) |
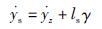
因此,
|
(9) |
综合式(7)~(9),取状态变量xl=[Δψ ys]T,控制变量ul=[β γ]T,车道线保持的状态空间模型为
|
(10) |
式中:
由第3节可知,车辆横摆力矩控制模型式(6)的输出向量为[β γ]T,而车道线保持模型式(10)的控制输入向量为[β γ]T,这样,在逻辑上,横摆力矩控制模型的输出向量作为车道线保持模型的控制输入向量. 因此,根据其逻辑上的串级关系,文中采用串级形式的稳定车道线保持的控制系统结构.
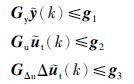
4.1 串级控制系统结构稳定车道线保持串级控制系统,如图 2所示. 该系统由主控制器和副控制器组成. 副控制器控制车辆在车道内行驶,控制车辆的行驶方向和在车道内行驶,提高车辆稳定性和操纵性,防止车辆出现欠转弯、 绕垂直轴旋转等现象. 主控制器基于MPC(model predictive control)算法实现车道线保持控制,可以控制车辆的横向位置偏差和航向角偏差最小,能准确地控制车辆跟踪车道线. 因此,利用副控制器保证车辆稳定性和操纵性基础上,再利用主控制器实现车辆在车道内准确地跟踪车道线、 保持行驶方向的车道内行驶.

|
| 图 2 串级控制系统结构图 Figure 2 System structure of cascade control |
滑移角和横摆率是车辆稳定性控制的参数. 控制滑移角和横摆率可以保证车辆在车道内的行驶方向和沿车道线行驶. 横摆力矩控制的目标是使得实际滑移角和横摆率跟踪期望滑移角和期望横摆率. 当出现欠转向趋势时,横摆力矩控制器增加轮胎刹车压力,产生恢复横摆力矩,防止出现车辆欠转向现象. 由式(5)可知,横摆力矩N作为产生车辆横摆率的重要因素之一. 对于四轮转向车辆,后轮转向δr会改善车辆的稳定性和操纵性. 因此,采用后轮转角δr和横摆力矩N作为车辆的横摆力矩控制的输入参数,滑移角和横摆率作为横摆力矩控制的输出参数.
4.2.1 滑移角和横摆率补偿控制滑移角和横摆率控制的状态空间模型,如式(6)所示,该模型具有两个输入和两个输出,可以采用状态反馈方法实现控制性能要求. 选取前轮转角δf为输入,则期望滑移角βd和期望横摆率γd传递函数表示为
|
(11) |
式中: kβ、 kγ分别为滑移角和横摆率传递函数增益系数; τβ、 τγ分别为滑移角和横摆率传递函数时间常数.
式(11)写成状态空间方程为

|
(12) |
式中:
为保证实际滑移角和实际横摆率跟随期望滑移角和期望横摆率,要求跟踪偏差为0,即

|
(13) |
式(6)减式(12)得到滑移角和横摆率跟踪偏差的状态空间方程为

|
定义

|
(14) |
则跟踪偏差的状态空间模型为
|
(15) |
式中: 状态矩阵A和输入矩阵B同式(6)中的A和B,Ce=diag(2),De=[0]2×2.
由式(14)得到

|
(16) |
再定义

|
(17) |
则式(16)转为
|
(18) |
式中:
式(18)中: u为实际控制向量,ud为期望控制向量,ufb为补偿控制向量. 式(18)描述了三者的关系. 据此,确定补偿控制向量ufb,则可以确定式(18). 也就是,通过确定补偿控制向量,进而实现对滑移角和横摆角的控制,即使得实际滑移角和实际横摆角跟踪期望滑移角和期望横摆角[14].
4.2.2 ufb计算由式(18)可知,ufb作为期望后轮转角和横摆力矩的补偿输入,用作保证跟踪偏差为0. 采用标准LQ(linear quadratic)问题求解ufb[16]. 针对式(15)的状态空间模型,为实现式(13),也就是使系统的状态保持在零值附近,因此,用标准LQ问题的状态调节器实现式(13),即使二次型性能指标

|
(19) |
为最小. 式(19)中: Qe为半正定是对称常数矩阵,Re为正定实对称常数矩阵,Qe、 Re分别为状态向量e和输入向量ufb的加权矩阵. 依据标准LQ问题,最优控制律为

|
(20) |
式中: P为常值正定矩阵,其必须满足黎卡提等式(Algebraic Riccati Equation):

|
(21) |
因此,式(20)的最优控制律ufb*的设计归于求解方程(21)的问题,并求出反馈增益矩阵F. 这样,矩阵F可以确定式(18)的ufb,同时保证满足式(13).
4.3 主控制器设计主控制器是基于MPC算法的车道线保持控制器. 主控制器的主要内容是设计控制律,通过智能地控制输入(即转向控制),在不同的纵向车速、 载荷、 风阻干扰和车道路面条件下,使得智能车辆准确地(或很小的跟踪误差)跟踪车道线,并保持较好的稳定性、 操纵性和乘坐舒适性.
4.3.1 车道线跟踪模型参照图 1智能车辆车道线保持控制模型,综合式(6)和式(10),智能车辆车道线保持控制的状态空间模型为
|
(22) |
式中:

式(6)的输出β和γ作为式(10)的输入,考虑到原式(6)的输入δr和N在直接力矩控制稳态时为一个定值,式(22)的车道线保持模型的输入为δf,即前轮转角δf作为输入向量,控制车辆车道线保持,兼顾车辆的操纵性和稳定性.
如图 1所示,车道线保持控制器的目标是通过控制前轮车轮转角δf使得横向偏差ys最小和偏航角偏差Δψ最小,保证车辆最优化跟踪车道线.
4.3.2 车道线保持模型离散时间模型定义系统的采样周期为Ts,车道线保持连续时间模型式(22)的离散时间状态空间模型为
|
(23) |
式中: k表示当前时刻,
定义
|
式中: Np为预测时域,Nc为控制时域. 定义ut(k)增量Δut(k)=ut(k)-ut(k-1).
由以上定义得到:

|
这里,
定义r(·)为参考轨迹. 这样,在当前时刻k,MPC问题的解,即
|
(24a) |
考虑智能车辆的实际参数和执行机构参数,式(24a)受约束于
|
(24b) |
式(24a)的第一部分累积和反映车道线保持跟踪期望性能指标,式(24a)的第二部分累积和反映控制输入ut的效果.
4.3.4 标准QP问题目标函数求解(1) 目标函数标准QP问题
由式(23)得到

|
(25) |
式中:

|
将式(25)代入到式(24a),目标函数变换为
|
(26) |
式中:

|
(2) 约束处理
重写式(24b)为
|
(27) |
式中:
进一步处理,得到

|
(28) |
式中: F0=Gu[1 … 1]T.
综合式(26)~式(28),目标函数标准QP问题表达式为

|
(29) |
约束于:

|
求解式(29)标准QP问题,最优前轮转角控制向量为

|
第1个元素

|
车辆参数和控制参数,如表 1所示.
| 参数名 | 值 | 单位 |
| m | 1 562 | kg |
| Iz | 2 360 | kg· m2 |
| af | 1.104 | m |
| ar | 1.421 | m |
| cf | 42 000 | N/rad |
| cr | 64 000 | N/rad |
| ls | 1.83 | m |
| τβ | 0.05 | s |
| kβ | 0 | - |
| τγ | 0.037 5 | s |
| kγ | 3.03 | s-1 |
| Np | 10 | - |
| Nc | 4 | - |
| g | 9.81 | m/s2 |
为确保横向控制能跟踪车道线(路径),选取道路的标准为道路曲率的连续性. 回旋螺旋的曲线可以被用来光滑地从一个曲率值道路转换到另一个曲率值道路. Fresnel(菲涅尔)积分是一种回旋曲线[13]. 因此,选取道路模型定义为
|
(30) |
式中: x(t)和y(t)为车道纵向和横向坐标,a为比例因子. Fresnel积分定义为
|
(31) |
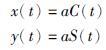
取a为400,t∈[-0.5 0.5],计算式(30)和式(31),得到仿真道路轨迹,如图 3所示. 图 3所示的仿真道路,符合实际道路的曲率变化.

|
| 图 3 仿真道路轨迹图 Figure 3 Simulation road trajectory |
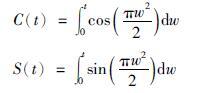
对图 3的仿真道路轨迹曲线,采用最小二乘曲线拟合法,分段拟合各段道路的曲率. 图 4中,将图 3的仿真车道轨迹分为5段. 车道轨迹的曲率拟合结果,如图 4所示.

|
| 图 4 仿真道路分段曲率拟合结果 Figure 4 Fitting results of road segment curvature |
取图 3所示的仿真车道线,0~4 s车道线半径为-313 m, 车辆应右转弯; 4~8 s车道线半径为-617 m, 车辆应右转弯; 9~12 s车道线半径为2 092 m, 车辆应左转弯; 12~16 s车道线半径为648 m, 车辆应左转弯; 16~20 s车道线半径为321 m, 车辆应左转弯.
5.3.1 基于LQ算法的直接车道线保持仿真结果基于LQ算法的直接车道线保持的仿真结果[18],如图 5所示. 该方法采用线性车辆模型和LQ算法,控制输入为车辆的前轮转角,输出为滑移角、 横摆率、 航向角误差和横向位置误差. 图 5(a)中的期望滑移角与实际滑移角存在偏差. 图 5(b)的期望横摆角率与实际横摆率存在偏差.

|
| 图 5 基于LQ算法车道线保持仿真结果 Figure 5 Results of lane keeping based on LQ |
图 6(a)的实际滑移角与期望滑移角不存在偏差. 图 6(b)实际横摆率与期望横摆率不存在偏差. 横摆力矩控制较好,实现期望滑移角和横摆率控制. 图 6(c)的航向角误差较小. 图 6(d)的横向位置误差较小,实现准确地跟踪车道线控制. 车道线半径越大,跟踪误差越小. 在0~8 s内,车辆为右转弯,在8~20 s内,车辆为左转弯. 图 6(e)中,在0~8 s内,前后轮转角为右侧转向,后轮转角小于前轮转角,车辆右转. 图 6(f)的横摆力矩为负值,使得车辆向右侧旋转. 图 6(e)和图 6(f)的8~20 s间,车辆左转和向左侧旋转. 由图 6(e)和图 6(f)可知,车辆的运动跟随车道线的变化. 同时对车辆的横摆力矩控制,使得车辆的滑移角和横摆率跟随期望值,保证车辆的稳定性和操纵性. 图 6与图 5比较,图 5的滑移角和横摆率较图 6的差,缺少对横摆力矩的有效控制.

|
| 图 6 基于串级控制车道线保持仿真结果 Figure 6 Results of lane keeping based on cascade control |
该文设计了四轮前后轮转向车辆稳定车道线保持串级控制系统,并在Matlab环境下进行了仿真研究. 仿真结果验证了文中策略的可行性和有效性.
(1) 传统的车道线保持控制通过调整车辆前轮转角使得横向位置偏差和航向角偏差最小,但未对车辆的稳定性进行直接控制. 将用于车道线保持控制的前轮转角作为车辆稳定性控制的输入,即计算车辆的期望滑移角和期望横摆率,通过调整车辆的后轮转角和横摆力矩,可以实现车辆的稳定性控制. 这样,副控制器环用来实现车辆稳定性控制,主控制器环用来实现车道线保持的前轮转角控制,因此,可以设计由主控制器环和副控制器环组成的串级控制系统用来实现车道线保持控制.
(2) 传统的基于LQ算法的车道线保持控制,可以控制车辆的横向位置偏差和航向角偏差为最小,但实际滑移角和实际横摆率不能跟踪期望滑移角和期望横摆率. 文中的车道线保持串级控制系统,主控制器基于MPC算法计算车道线保持的车辆前轮转角并作为副控制器的输入,副控制器采用车辆后轮转角和横摆力矩作为控制向量,调整车辆的滑移角和横摆率. 仿真结果表明,车辆的横向位置偏差和航向角偏差最小,车辆的实际滑移角和实际横摆率能跟踪期望滑移角和期望横摆率. 这样,不仅实现准确地车道线保持控制,而且提高了车辆稳定性、 操纵性和乘坐舒适性.
| [1] | Luo L H. Steering control for lane keeping system based on MPC[J]. Journal of Shanghai Jiaotong University , 2014, 48 (7) : 1015–1020. |
| [2] | Riccardo M, Stefano S, Mariana N. Nested PID steering control for lane keeping in autonomous vehicles[J]. Control Engineering Practice , 2011 (19) : 1459–1467. |
| [3] | Wu S J, Chiang H H, Perng J W, et al. The heterogeneous systems integration design and implementation for lane keeping of a vehicle[J]. IEEE Transactions on Intelligent Transportation Systems , 2008, 9 (2) : 246–263. DOI:10.1109/TITS.2008.922874 |
| [4] | Cerone V, Milanese V, Regruto D. Combined automatic lane keeping and driver′s steering through a 2 DOF control strategy[J]. IEEE Transactions on Control Systems Technology , 2009, 17 (1) : 135–142. DOI:10.1109/TCST.2008.924558 |
| [5] | Mammar S, Chaib S, Netto M. H-infinity, adaptive, PID and fuzzy control: A comparison of controllers for vehicle lane keeping[C]//Proceedings of the IEEE Intelligent Vehicles Symposium. Piscataway, NJ, USA: IEEE, 2004: 139-144. |
| [6] | Tong G, Wang Q, Jin X X. Lane keeping control of vehicles with tire model[J]. Applied Mechanics and Materials , 2013, 2095 (246) : 929–933. |
| [7] | Zhang H L, Luo Y G, Jiang Q Y, et al. Lane keeping system based on electric power steering system[J]. Automotive Engineering , 2013, 35 (6) : 527–531. |
| [8] | Liu L, Nagai M, Raksincharoensak P. On torque control of vehicle handling and steering feel for avoidance maneuver with electric power steering[C]//Proceedings of the 17th IFAC World Congress. Kington, UK: IFAC, 2008: 12703-12708. |
| [9] | Li W, Duan J M, Gong J W. Vehicle lane-keeping control under state time-delay and mismatched uncertain perturbations[J]. Control Theory & Applications , 2012, 29 (3) : 389–394. |
| [10] | Riccardo M, Stefano S, Giuseppe O, et al. A nested PID steering control for lane keeping in vision based autonomous vehicles[C]//Proceedings of the 2009 American Control Conference. Piscataway, NJ, USA: IEEE, 2009: 2885-2890. |
| [11] | Benine-Neto A, Scalzi S, Mammar S, et al. Dynamic controller for lane keeping and obstacle avoidance assistance system[C]//13th International IEEE Annual Conference on Intelligent Transportation Systems. Piscataway, NJ, USA: IEEE, 2010: 1363-1368. |
| [12] | 宗长富, 郑宏宇, 田承伟, 等. 基于直接横摆力矩控制的汽车稳定性控制策略[J]. 吉林大学学报: 工学版 , 2008, 38 (5) : 1010–1014. Zong C F, Zheng H Y, Tian C W, et al. Vehicle stability control strategy based on direct yaw moment control[J]. Journal of Jilin University: Engineering and Technology Edition , 2008, 38 (5) : 1010–1014. |
| [13] | Rajamani R. Vehicle dynamics and control[M]. Berlin, Germany: Springer , 2012 : 47 -87. |
| [14] | Boada B L, Boada M J L, Díaz V. Fuzzy-logic applied to yaw moment control for vehicle stability[J]. Vehicle System Dynamics , 2005, 1 (10) : 753–770. |
| [15] | 祁永宁, 陈南, 李普. 四轮转向车辆的直接横摆力矩控制[J]. 东南大学学报: 自然科学版 , 2004, 34 (4) : 451–454. Qi Y N, Chen N, Li P. Direct yaw moment control on four wheel steering vehicles[J]. Journal of Southeast University: Natural Science Edition , 2004, 34 (4) : 451–454. |
| [16] | 李振虎, 谭述君, 吴志刚. LQ终端控制的生成函数法与Riccati变换法的等价性[J]. 控制理论与应用 , 2009, 26 (8) : 896–898. Li Z H, Tan S J, Wu Z G. Equivalence between generating function method and Riccati transformation method for LQ terminal control[J]. Control Theory & Applications , 2009, 26 (8) : 896–898. |
| [17] | AhKim B, Lee S H, Young O L, et al. Comparative study of approximate, proximate and fast model predictive control with applications to autonomous vehicles[C]//2012 12th International Conference on Control, Automation and Systems. Piscataway, NJ, USA: IEEE, 2012: 479-484. |
| [18] | Katsumi M. On automatic motion control with optimization[C]//SICE Annual Conference. Nagoya, Japan: SICE, 2003: 1248-1253. |