



2. 空军西安飞行学院, 陕西 西安 710306
2. Xi'an Flight College of Air Force, Xi'an 710306, China
1 引言
无人机(unmanned aerial vehicle,UAV)视觉侦察指无人机飞行过程中控制摄像机获取区域图像并实时检测目标信息,是执行侦察、监视和跟踪等任务的基础.视觉传感器是无人机获取目标信息的主要工具[1-2],然而,小型无人机的摄像机安装平台——云台,虽然能够进行角度调整,但由于成本和硬件限制往往不具备安装陀螺稳定平台的条件,无人机在执行任务过程中的位姿变化不可避免地改变着摄像机的视场范围(field of view,FOV)和探测指向(line of sight,LOS)[3-11].
辛哲奎等[6]在摄像机外参数未知的情况下建立了目标点在图像平面的运动学模型,基于李亚普诺夫稳定性理论设计了云台自适应控制算法. Barber等[8]应用目标在图像中的像素位置,结合UAV位置和高度、相机姿态角,给出了一种从小型固定翼无人机获取的图像中定位地面目标的方法,并分析了定位误差的可能来源和每种误差源对定位影响的灵敏度.谭安胜[9]针对无人机搜索任务构建了光电载荷收容能力分析模型,在“收容畸变率”概念的基础上构建了其计算模型,分析了收容畸变对探测的影响.针对目标跟踪,Wheeler[10]在云台上安装角速率陀螺测量摄像机视线角速率,利用控制器修正角速率变化稳定摄像机,并利用GPS前馈、目标图像位置反馈修正视线误差.王日俊[11]与陈松林[12]针对云台扰动,构建扰动观测器来补偿视轴指向误差并隔离振动.吴岸平等[13]在已知目标点的GPS坐标的情况下,利用传感器信息,计算并控制摄像机指向完成对目标点的跟踪观测,从而提高云台指向精度.
本文对目标图像信号,也就是目标在电荷耦合组件(charge-coupled device,CCD)中的位置进行分析,建立其关于目标运动状态、无人机运动状态、云台姿态和摄像机参数等之间的数学关系.探索利用无人机本体的运动状态测量信息,面向任务考虑云台的控制问题.为简化问题起见不考虑摄像机的缩放.
2 UAV视觉侦察系统建模为了对UAV与摄像机的安装交联进行分析,对侦察平台——云台进行数学建模.
2.1 坐标系定义与本文研究问题相关的坐标框架有惯性系、机体系和云台系.为便于分析求解,在惯性系oi-xiyizi和机体系ob-xbybzb基础上给出云台系的定义.通常情况下,摄像机光轴垂直于CCD平面.
定义1 云台坐标系og-xgygzg:og为云台旋转中心,如图 1所示,ogxg平行于光轴,ogyg指向CCD右侧,ogzg指向CCD下方,与ogxg和ogyg构成右手坐标系.

|
| 图 1 云台坐标系定义 Figure 1 The definition of gimbal coordination |
定义2 如果ob-xbybzb绕obzb转动ψg角度得到og-xg′yg′zg′,然后将其绕ogyg′负方向转动θg角度能够得到云台坐标系og-xgygzg,那么就可以定义[ψg,θg]T为“云台姿态”.如图 2所示,ψg和θg分别称为云台摇摄角和倾斜角.

|
| 图 2 云台姿态角定义 Figure 2 The definition of gimbal attitude angle |
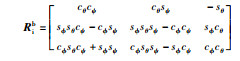
(1) 惯性坐标系到机体坐标系的角度转换矩阵Rib:
|
(1) |
其中,θ、ψ和ϕ为UAV姿态角,

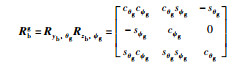
(2) 机体坐标系到云台坐标系的角度转换矩阵Rbg:
|
(2) |
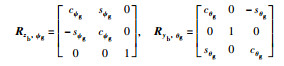
其中,Rzb,ψg为绕obzb轴旋转ψg角度的旋转变换矩阵,Ryb,θg为绕obyb轴负方向旋转θg角度的旋转变换矩阵:
|
(3) |
对坐标系之间角度转换关系的分析,有助于理解将机载位姿测量信息引入到云台控制中的解算过程.分别针对目标搜索和目标跟踪任务的特点来考虑云台的控制是提高任务效能的有效措施.
2.3 舵机响应模型小型云台电机多采用脉宽调制信号作为控制指令[15],其角度响应可表示为

|
(4) |
式中,χ(t)为当前角度,χcmd(t)为指令角度,τ为时间常数,dt为采样时间. 2自由度云台安装2个电机,在俯仰框架内χ(t)=θg(t),在旋转框架内取χ(t)=ψg(t).
3 面向搜索任务的云台补偿控制 3.1 UAV姿态运动对FOV的影响由于受载重量和成本的限制,小型UAV云台没有姿态传感器,因此,UAV与传感器设备的安装交联和UAV的六自由度运动会使得探测路径与飞行路径之间产生差异.特别是当UAV飞行高度较高以及转弯机动时,探测路径和飞行路径之间的差异更不能被忽略[8].如图 3所示,“飞行区域”是UAV在遂行搜索任务时的飞行轨迹;“搜索区域”是传感器FOV所收容的区域.

|
| 图 3 飞行区域和搜索区域 Figure 3 Flight area and search area |
如图 4所示,假设任一时刻UAV的姿态变化致使云台摇摄角变化Δψg,则FOV相对原FOV的位置偏移量Δxi=Δψg·D,其中D为探测距离.例如,当云台摇摄角速度为5 °/s,D=500 m时,FOV的偏移速度将高达43.63 m/s,可见UAV姿态引起的LOS变化将导致FOV有较大的位置偏移.

|
| 图 4 摇摄角变化对FOV的影响 Figure 4 The effect of pan angel change on FOV |
为保证搜索的遍历效果,迫切需要协调UAV与云台两者的控制.因此,本文考虑将机体测量信息引入到云台的控制中,通过对云台姿态[ψg,θg]T的控制,在耦合作用的消极影响发生前将其抵消掉,克服FOV在UAV姿态变化时的偏移.
3.2 UAV姿态补偿控制为描述搜索任务对云台控制的要求,仅考虑摄像机LOS相对于惯性坐标系oi-xiyizi的几何关系,图 5中,定义θ′为LOS在平面oi-xizi上的投影LOS′与oizi的夹角,ψ′为LOS在平面oi-xiyi上的投影LOS″与oiyi的夹角.云台控制的最终目标是:通过对云台姿态[ψg,θg]T的控制,θ′和ψ′将不受UAV姿态变化的干扰并保持稳定不变,直到下一次人为施加影响.换句话说,就是保持LOS相对于惯性空间的角度稳定性.

|
| 图 5 LOS相对惯性空间的角度稳定性分析 Figure 5 Angular stability analysis of LOS in relative to inertial space |
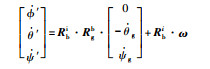
下面分析UAV姿态变化对LOS产生的影响.机体坐标系中UAV姿态角速度ω=[p q r]T,则有如下几何关系:
|
(5) |
由于云台不具备绕ogxg轴旋转的自由度,因此,使


由式(5)不难看出,可以分两步来抵消UAV角运动带来的消极影响,在旋转框架下通过云台摇摄角速率控制作用
|
(6) |
文[16-19]分别针对各自控制对象、单目摄像机、“仿生眼球”和双目相机等,以目标图像信号与CCD中心的偏移量作为反馈信号对云台进行控制,来解决目标跟踪问题.实际上,由于受到气流变化、姿态调整和相对目标位置变化等因素的影响,很难确保目标稳定位于CCD中心;此外,计算机图像技术尚不发达,UAV高度依赖的数据链总存在时间延迟[20],可能会由于成像模糊、跳动等降低图像识别准确度,造成目标脱离FOV而丢失.
4.1 相对平移运动对凝视的影响在目标跟踪任务过程中,除去姿态变化,UAV相对目标的实时位置变化也给摄像机“凝视”目标带来了一定程度的不良影响.为此,分析UAV与目标的相对位置变化对摄像机探测产生的影响.

|
| 图 6 相对运动对凝视的影响 Figure 6 The effect of relative motion on gazing |
目标到摄像机距离为D,相对位移为Δxi时,CCD上目标成像点的位移Δxc=f/D·Δxi.例如,UAV与目标相对运动速度为15 m/s,f=0.13 m,D=500 m时,取1 pixel的尺寸为0.3 mm,则目标像素点在CCD上的运动速度可达13 pixel/s.可见相对平移运动较大程度上影响了摄像机对目标的凝视.
4.2 UAV运动补偿控制采集到的UAV运动速度为VUAV,Vtar为估计得到的目标运动速度,则机体坐标系ob-xbybzb下两者的相对运动速度为

|
(7) |
如果在ob-xbybzb下目标到UAV的位置向量为D(非零向量),则相对位置变化引起的角速度为

|
(8) |
综上,对式(5)做以下修正并解得
|
(9) |
定义[dθg dψg]T为文[9~11]所提目标成像点相对CCD中心的偏移量,综上,得到云台舵机的补偿控制指令:
|
(10) |
其中,常数K1>0,K2>0,对UAV位姿测量信息和目标状态估计的采样时间为Δt.
5 仿真 5.1 面向搜索任务的云台控制效果自驾仪接收阶跃输入ϕcmd后,UAV姿态角速率如图 7所示,如不对云台进行控制,必然致使摄像机FOV发生变化.通过仿真验证搜索过程中云台补偿控制的有效性,对摄像机前视和右侧视时的FOV进行仿真计算.

|
| 图 7 UAV姿态角速率曲线 Figure 7 The curves of UAV attitude angular rate |
在摄像机前视(θg=70°,ψg=0°)情况下,云台补偿控制前后的FOV如图 8(a)和图 8(b)所示,云台姿态如图 8(c)和图 8(d)所示,可以得知,补偿控制使得云台能够适应UAV姿态变化,并不断调整ψg和θg使得摄像机能够保持近似不变的对地收容范围,克服了FOV的扭曲畸变,达到了良好的控制效果.

|
| 图 8 视场范围和云台姿态(前视) Figure 8 FOV and gimbal attitude (foresight) |
摄像机右侧视(θg=70°,ψg=-90°),无控制作用时FOV如图 9(a)所示;在如图 9(c)和图 9(d)实线所示云台姿态调整下FOV如图 9(b)所示,补偿控制作用仍能够显著改善对地侦察探测效果.如果把UAV视为一个质点,可以发现通过云台控制,FOV相对于该质点保持了稳定不变的位置和形状.

|
| 图 9 视场范围和云台姿态(右侧视) Figure 9 FOV and gimbal attitude (right-side view) |
仿真设置:目标初始位置为(25 900,18 800),以8 m/s的速度沿北、东、南、西4个方向各运动250 s,路径如图 10中正方形所示,UAV从初始位置(25 000,18 500)出发对目标进行定距(stand-off)跟踪.在480 pixel×480 pixel的CCD成像阵列中,中心像素点为(240 pixel,240 pixel).

|
| 图 10 目标与UAV运动路径 Figure 10 Motion path of target and UAV |
利用文[21]中所提制导控制方法,UAV飞行路径为图 10中螺旋线,细实线为每一时刻UAV和目标的位置连线. 图 11为跟踪过程中UAV的姿态角速率变化曲线.

|
| 图 11 跟踪过程UAV姿态角速率曲线 Figure 11 Attitude angular rate curves of UAV during tracking task |
通过仿真验证云台的控制效果. 图 12和图 13中,虚线为偏移量反馈控制的云台姿态和凝视效果;实线为加入补偿控制的凝视效果.对照图 11和图 13可知,UAV相对目标的位姿变化造成目标成像点在CCD中心像素点附近振荡,虽然振荡范围在几个像素左右,但这仅仅是不考虑摄像机缩放的情况,事实上摄像机缩放会导致目标所在像素点在较大范围内振荡,甚至可能会造成目标偏离FOV而丢失.而基于UAV本体位姿信息和对目标的探测数据对云台进行补偿控制,一定程度上能够隔离UAV运动对“凝视”造成的不良影响.

|
| 图 12 云台姿态变化曲线 Figure 12 The change curves of gimbal attitude |

|
| 图 13 CCD上目标成像点的振荡情况 Figure 13 Image point oscillations of target on CCD |
在搜索任务中,飞行路径与传感器探测路径相协调,是遍历待搜索区域的重要保证;而在对地目标跟踪任务中,实时调整云台姿态稳定凝视目标是保证跟踪任务顺利完成的关键.本文针对小型无人机云台LOS与飞行运动的强耦合性,在云台控制中引入无人机本体位姿测量信息削弱对地搜索时无人机姿态变化给探测带来的负面影响,改善了对地侦察探测效果;针对目标跟踪任务过程中无人机与目标相对位置不断变化的特点,融合目标运动状态估计值将相对运动引入到云台控制环节,实现了跟踪过程中无人机与云台的协调控制.
本文仅从理论上研究了面向任务的云台补偿控制,而工程实践中对无人机位姿测量信息的采样是否会将噪声引入到飞控系统、采样时间选取是否会诱发云台控制振荡以及系统可靠性是否会降低等问题仍有待后续研究.
| [1] | Office of the Secretary of Defense. Unmanned systems integrated roadmap FY2013-2038[R]. Washington DC, USA:Department of Defense, 2013. |
| [2] | 曹美会, 鲜斌, 张旭, 等. 基于视觉的四旋翼无人机自主定位与控制系统[J]. 信息与控制 , 2015, 44 (2) : 190–196, 202. Cao M H, Xian B, Zhang X, et al. An autonomous vision-based localization and control system for quadrotor UAV[J]. Information and Control , 2015, 44 (2) : 190–196, 202. |
| [3] | 李迪.微型飞行器电子稳像技术研究[D].长春:中国科学院长春光学精密机械与物理研究所, 2012. Li D. Study on electronic digital image stabilization technology for the image sequences of MAV[D]. Changchun:Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, 2012. |
| [4] | 李贤涛, 张葆, 沈宏海. 基于自抗扰控制技术提高航空光电稳定平台的扰动隔离度[J]. 光学精密工程 , 2014, 22 (8) : 2223–2231. Li X T, Zhang B, Shen H H. Improvement of isolation degree of aerial photoelectrical stabilized platform based on ADRC[J]. Optics and Precision Engineering , 2014, 22 (8) : 2223–2231. DOI:10.3788/OPE. |
| [5] | Mei Y, Zhao H Y, Guo S Y. The analysis of image stabilization technology based on small-UAV airborne video[C]//Proceedings of IEEE International Conference on Computer Science and Electronics Engineering. Piscataway, NJ, USA:IEEE, 2012:586-589. |
| [6] | 辛哲奎, 方勇纯, 张雪波. 小型无人机地面目标跟踪系统机载云台自适应跟踪控制[J]. 控制理论与应用 , 2010, 27 (8) : 1001–1006. Xin Z K, Fang Y C, Zhang X B. Adaptive control for on-board pan-tilt camera in an UAV ground-target-tracking system[J]. Control Theory & Applications , 2010, 27 (8) : 1001–1006. |
| [7] | 王日俊.多旋翼无人飞行器载荷稳像技术研究[D].长春:中国科学院长春光学精密机械与物理研究所, 2015. Wang R J. Study on image stabilization technology for the payload of mUAV[D]. Changchun:Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Science, 2015. |
| [8] | Barber D B, Redding J D, Mclain T W, et al. Vision-based target geo-location using a fixed-wing miniature air vehicle[J]. Journal of Intelligent and Robotic Systems , 2006, 47 (4) : 361–382. DOI:10.1007/s10846-006-9088-7 |
| [9] | 谭安胜. 舰载无人机光电载荷对海上目标搜索决策分析[J]. 指挥控制与仿真 , 2010, 32 (4) : 21–27. Tan A S. Decision analysis of searching for offshore target for O-E payload loaded in the ship-board UAV[J]. Command Control & Simulation , 2010, 32 (4) : 21–27. |
| [10] | Wheeler M, Wise R, Rysdyk R, et al. Autonomous cooperative geo-location and coordinated tracking of moving targets[C]//Proceedings of AIAA InfoTech and Aerospace Conference and Exhibit. Sar Francisco, CA, USA:AIAA, 2007. |
| [11] | 王日俊, 白越, 续志军, 等. 基于扰动观测器的机载云台扰动复合补偿方法[J]. 光电子激光 , 2015, 26 (1) : 108–115. Wang R J, Bai Y, Xu Z J, et al. A composite disturbance compensation method for airborne platform base on improved disturbance observer[J]. Journal of Optoelectronics·Laser , 2015, 26 (1) : 108–115. |
| [12] | 陈松林, 单梅林, 王丽斌. 基于干扰观测器的飞行仿真转台完全跟踪控制[J]. 电机与控制学报 , 2015, 19 (1) : 113–118. Chen S L, Shan M L, Wang L B. Disturbance observer-based robust perfect tracking control for flight simulator[J]. Electric Machines and Control , 2015, 19 (1) : 113–118. |
| [13] | 吴岸平, 侯中喜, 王鹏, 等. 基于神经网络逆模型辨识的舵机云台控制[J]. 华中科技大学学报:自然科学版 , 2013, 41 (S1) : 13–16. Wu A P, Hou Z X, Wang P, et al. Steering gear control based on neural network inverse model identification[J]. Journal Huazhong University of Science & Technology:Natural Science Edition , 2013, 41 (S1) : 13–16. |
| [14] | 孙辉. 机载光电平台目标定位与误差分析[J]. 中国光学 , 2013, 6 (6) : 912–918. Sun H. Target localization and error analysis of airborne electro-optical platform[J]. Chinese Optics , 2013, 6 (6) : 912–918. |
| [15] | Crawford B G. Design and evaluation of an autonomous, obstacle avoiding, flight control system using visual sensors[D]. Lawrence, KA, USA:University of Kansas, 2004. |
| [16] | Liu Y H, Wang H S, Wang C Y, et al. Uncalibrated visual servoing of robots using a depth-independent interaction matrix[J]. IEEE Transactions on Robotics , 2006, 22 (4) : 804–817. DOI:10.1109/TRO.2006.878788 |
| [17] | Capparella F, Freda L, Malagnino M, et al. Visual servoing of a wheeled mobile robot for intercepting a moving object[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA:IEEE, 2005:2021-2027. |
| [18] | Zou H R, Gong Z B, Xie S R, et al. A pan-tilt camera control system of UAV visual tracking based on biomimetic eye[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics. Piscataway, NJ, USA:IEEE, 2006:1477-1482. |
| [19] | 夏候凯顺, 陈善星, 邬依林. 基于双目云台相机的目标跟踪系统建模与仿真[J]. 系统仿真学报 , 2015, 27 (2) : 362–368. Xiahou K S, Chen S X, Wu Y L. Modeling and simulation for target tracking system based on dual-pan-tilt camera[J]. Journal of System Simulation , 2015, 27 (2) : 362–368. |
| [20] | 李屹东, 李悦霖. 察打一体无人机的特点与发展[J]. 国际航空 , 2014 (9) : 24–27. Li Y D, Li Y L. Evolution of hunter-killer drone[J]. International Aviation , 2014 (9) : 24–27. |
| [21] | 关旭宁, 魏瑞轩, 吴楠, 等. 无人机跟踪地面目标制导控制方法[J]. 电光与控制 , 2013, 20 (10) : 51–55. Guan X N, Wei R X, Wu N, et al. Guidance and control of UAV for ground target tracking mission[J]. Electronics Optics & Control , 2013, 20 (10) : 51–55. |