



1 引言
弹道导弹在中段飞行过程中,真弹头周围有各种轻、重诱饵,有源干扰机以及大量碎片,构成了复杂的目标群,给识别带来了极大的挑战[1].如何有效地识别出多个有威胁的目标,是实现弹道目标识别要解决的关键问题.
提取不同特征进行融合识别成为雷达目标识别领域研究的热点[2-7].文[2]提取了HRRP的幅度特征、功率谱特征和频谱幅度特征,分别使用最大相关分类器、支持向量机和相关向量机进行多类分类,并用加权投票法对拒判和识别结果进行融合,提高了识别系统的性能.文[3]利用多极化HRRP提供的目标特征信息,将混淆矩阵提供的基分类器可信度值与SVM后验概率结合到DS证据理论的基本概率赋值中,降低了融合分类的误识率.文[4]从目标的RCS (radar cross-section)、微多普勒频率、一维距离像和二维ISAR (inverse synthetic aperture radar) 像提取目标不同特征,然后结合BP神经网络和DS实现多特征空域融合和时域融合识别,提高了目标识别率,降低了识别结果的不确定性.文[5]将多个分类器对雷达目标的识别正确率结合到模糊函数赋值中,构造了模糊融合识别系统来提升目标性能.文[6]采用稀疏表示分类器和SVM (support vector machine) 对SAR (synthetic aperture radar) 图像分类,并利用样本分布和各个分类器输出的混淆矩阵提供的可信度来构造贝叶斯规则进行融合识别,获得了稳健的融合识别性能.
尽管上述方法从不同侧面获得了较好的识别结果,但仍然存在有待进一步解决的问题,比如,用加权投票法进行融合存在如何确定权值和如何处理冲突判决的问题,而应用DS证据理论进行融合存在如何得到基本概率赋值等问题.本文对基于目标HRRP的融合识别方法进行了研究,对提取的目标HRRP特征利用扩展的多类分类相关向量机(multi-class relevance vector machine,MRVM) 概率模型进行分类,并用DS证据理论融合分类结果以得到目标识别结果,从而提出了一种结合MRVM和DS的弹道中段目标HRRP融合识别方法.该方法充分利用了MRVM输出的概率信息,解决了用DS证据理论进行融合时基本概率赋值获取困难的问题.
2 相关向量机相关向量机(RVM)[8-10]是Tipping在2000年提出的一种基于贝叶斯框架理论的机器学习方法. RVM具有与SVM相同的决策形式,但有效地克服了SVM存在的稀疏性不强、需要估计规则化系数、核函数必须满足Mercer条件、缺乏必要的概率信息等缺点,它充分考虑了不确定因素的影响,基于贝叶斯理论推导模型参数,在输出样本分类标签的同时,还能够提供样本的后验概率分布.目前,RVM已广泛应用于高光谱图像分类[11]、网络流量分类[12]、人体行为识别[13]等领域.
2.1 RVM二分类模型 2.1.1 RVM模型对于二分类问题,给定一组训练样本x=(xn)n=1N,对应的类别标号为t=(tn)n=1N,其中N为样本个数,RVM的分类函数定义为

|
(1) |
其中,K(x,xi) 为核函数,wi是模型的权值.把Logistic Sigmoid连接函数σ(y)=1/(1+e-y) 应用于y(x),使得p(t|x) 服从伯努利分布.假设训练样本独立同分布,那么整个样本集的似然函数为

|
(2) |
其中,t=[t1,t2,…,tN]T,w=[w0,w1,…,wN]T.
在贝叶斯框架下,可以通过最大化似然函数来估计参数向量w,但为了避免过学习问题,RVM为每个权值定义了高斯先验概率分布来约束参数:
|
(3) |
其中,α=(α0,α1,…,αN) 是N+1维超参数,并假设α服从Gamma先验概率分布.对每一个权值配置超参数是RVM的最显著特点,最终导致了算法求解的稀疏特性.
2.1.2 参数推断给定了先验概率和似然分布,根据贝叶斯准则,得到如下后验概率:

|
(4) |
若获得了p(w,α|t),则对于给定的测试样本x*,相应输出t*的预测分布是

|
(5) |
但我们无法计算p(t)=∫p(t|w,α)p(w,α) dwdα,所以无法直接计算式(4) 中的后验概率p(w,α|t),然而可以将后验概率分解为

|
(6) |
关于权重的后验概率分布式如下:
|
(7) |
由于后验概率p(w|t,α) 和p(α|t) 无法通过积分求解,因此利用拉普拉斯方法的逼近过程进行近似.首先对p(w|t,α) 进行逼近.
1) 对当前固定的α值,求最大可能的权值wMP.
因为p(w|t,α)∝p(t|w)p(w|α),故可以将关于w的最大后验概率估计等价为最大化:
|
(8) |
其中,A=diag (α0,α1,…,αN),yn=σ{y(xn;w)}.
2) 利用拉普拉斯方法,将对数后验概率进行二次逼近.对式(8) 两次求导得出:

|
(9) |
其中,


|
(10) |

|
(11) |
由于p(α|t)∝p(t|α)p(α),所以对于p(α|t) 的求解可以转化为超参数的后验分布p(α|t) 关于α的最大化问题.我们仅需对p(t|α) 最大化:
|
(12) |
其中,C=B+ΦA-1ΦT.采用拉普拉斯方法可求得:

|
(13) |
在式(13) 中,γi≡1-αiΣii,Σii是Σ的第i个对角元素.通过不断地迭代,大部分wiMP将趋于0,少量的wiMP趋向于稳定有限值,对应的xi即为相关向量(relevant vector),体现了数据中最核心的特征.
RVM分类决策准则为:如果σ(yi)=1/(1+e-yi) < 0.5,ti=0,反之ti=1. RVM二分类模型不仅可以获取样本的类别信息,还可以输出后验概率信息,这种概率信息表征了分类结果的不确定性.
2.2 RVM多类分类模型RVM基本模型只能解决二分类问题,一对多(one-versus-all,OVA) 和一对一(one-versus-one,OVO) 方法是构建多类分类器的常用方法.对于k类分类,一对多方法在其中的一类与剩余的各类别之间构造一个分类器,共计构造k个二分类器,但可能存在测试样本同时属于多类或不属于任何一类的拒分区域.一对一方法在每两个类别之间构造一个分类器,共计构成k(k-1)/2个二分类器,因此需要的二分类器较多,但是分类精度较高.如何根据单个RVM二分类器的输出得到多类分类的概率输出是实现MRVM需要解决的关键问题.
2.2.1 一对多多类分类模型在一对多方法中,一个k分类问题需要综合k个二元RVM分类器的输出结果得到多类分类的概率输出.本文将二元Sigmoid函数扩展为多元后[14],用于多类分类,样本属于第i类的概率为
|
(14) |
yi为第i个RVM二分类器的输出.最终决策规则为

|
(15) |
即取后验概率最大的类别为样本x所属的类.
将此模型构造的RVM多类分类器称为MRVM (OVA).
2.2.2 一对一多类分类模型在一对一方法中,一个k分类问题需要综合k(k-1)/2个二元RVM分类器的输出的结果得到多分类的概率输出.本文采用“成对分解”(pairwise coupling)[15-16]方法解决多类分类的后验概率拟和问题.设rij为第i类和第j类之间构造的RVM二分类器识别样本x时其属于某一类概率,pi为一对一方法最终估计的属于每一类的概率,即rij=P(t=i|t=i或t=j,x),且有rij+rji=1,rij≈pi/(pi+pj).那么rij/rji≈pi/pj,对其变换求和得:
|
(16) |
那么可通过解决以下优化问题来估计pi:
|
(17) |
记p=[p1,p2,…,pk]T,模型转化为
|
(18) |
这是一个凸二次规划问题,当满足式(19) 时,取得最优解.
|
(19) |
式中,e=[1,1,…,1]T.
令t=1,…,k;1,…,重复迭代,得到最优解求解过程如下:
1) 利用式(20) 更新pt.
|
(20) |
2) 对p进行归一化处理.
3) 验证p是否满足式(19),若满足则停止迭代,得到多分类的概率p.
最终决策规则为

|
(21) |
即取后验概率最大的类别为样本x所属的类.
将此模型构造的RVM多类分类器称为MRVM (OVO).
本文将MRVM (OVA) 和MRVM (OVO) 通称为MRVM.
3 结合MRVM和DS的弹道目标HRRP融合识别方法通过MRVM分类,可以得到样本所属类别及后验概率信息.其中,后验概率信息表示样本隶属于某个类别的可能性,是对分类结果不确定性的有效度量. DS证据理论[17]是一种有效的决策层融合方法,它使用非精确概率对不确定性建模,在对不确定信息的表示、处理及融合问题的解决中具有明显的优势,然而如何获取基本概率赋值(basic probability assignment,BPA) 是用DS证据理论进行不确定信息融合时需要解决的关键问题.本文将RVM基本模型扩展为多类分类模型MRVM,然后与DS证据理论相结合,用于弹道中段目标HRRP分类和融合识别,充分利用了MRVM输出的概率信息,解决了用DS证据理论进行融合时基本概率赋值问题,从而提出一种结合MRVM和DS的弹道中段目标HRRP融合识别方法MRVM_DS.该方法在提取目标不同特征的基础上,用MRVM进行分类识别,并结合MRVM输出的样本后验概率信息与分类正确率构建BPA函数,最后用DS证据理论融合不同特征分类结果以得到目标识别结果.
3.1 HRRP特征提取雷达目标的高分辨距离像(high resolution range profile,HRRP) 是目标多散射中心在雷达径向距离上的一维分布图,反映了这些散射中心的散射强度和相对位置等目标特征信息.由于HRRP存在姿态敏感性、平移敏感性和幅度敏感性问题,克服这三大敏感性问题是实现HRRP特征提取的关键.姿态和幅度敏感性问题可分别通过对一定角域内的距离像进行非相干平均和对距离像幅度进行归一化解决[18],平移敏感性可以通过提取平移不变特征[19]来克服.常见的HRRP平移不变特征有径向长度[20]、散射中心个数、中心距[21],本文提取这三种特征用于目标识别.
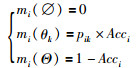
3.2 基本概率赋值获取用DS证据理论进行不确定信息融合时,基本概率赋值是需要解决的关键问题.对于多类分类识别问题,辨识框架为Θ={∅,θ1,θ2,…,θk,Θ},本文基于分类器的输出根据式(22) 构造BPA函数:
|
(22) |
其中,Acci为第i个多类分类器的分类精度,pik为用第i个多类分类器分类样本时其属于第k类的概率,mi(∅)、mi(θk)、mi(Θ) 分别表示空集、第k类和全集的BPA.
3.3 结合MRVM和DS的弹道目标HRRP融合识别方法结合MRVM和DS的弹道目标HRRP融合识别方法的流程如图 1所示.

|
| 图 1 结合MRVM和DS的弹道目标融合识别流程图 Figure 1 Ballistic target fusion recognition flow chart by combining MRVM with DS |
MRVM_DS方法主要包括训练阶段和融合识别阶段.具体步骤如下:
1) 训练阶段:
Step 1对目标HRRP数据,分别提取径向长度特征、强散射中心数目特征、中心距特征.
Step 2利用不同特征分别构成特征向量,训练MRVM基分类器.
2) 识别阶段:
Step 1对未知类别目标HRRP,提取径向长度特征、强散射中心数目特征、中心距特征.
Step 2利用训练好的MRVM基分类器分别进行特征分类.
Step 3根据各MRVM的分类结果:预测概率和分类正确率,利用式(22) 构造BPA,用DS证据理论进行融合,得到最终目标识别结果.
根据构造MRVM分类器时采用的是一对多模型还是一对一模型,将MRVM_DS分别称为MRVM_DS (OVA) 和MRVM_DS (OVO).
4 实验及分析分别设计了不同实验,以验证所提MRVM后验概率估计的准确性,以及所提融合识别方法的有效性.
为了便于与SVM比较,实验中采用Platt[22]提出的Sigmoid函数将SVM的输出映射到[0,1],以获得SVM的后验概率输出,并采用本文提出的一对多和一对一多类分类模型实现概率型MSVM (OVA) 和MSVM (OVO) 多类分类器设计.最后采用本文所提方法构造BPA,实现多类分类SVM与DS证据理论相结合的弹道目标HRRP融合识别方法,并将此方法称为MSVM_DS (包括MSVM_DS (OVA) 和MSVM_DS (OVO)). MSVM_DS方法的具体步骤与MRVM_DS相同.
实验中RVM与SVM均选用常用的径向基核函数,SVM参数设置为C=10,γ=1/2,RVM核参数设置为γ=1/2.算法基于LIBSVM (library for support vector machines)[16]和二分类RVM工具箱[23]实现,实验基于Matlab 7.14(R2012a) 在普通PC机上进行,PC机配置为8 G内存,3.6 GHz CPU.
1) 实验1:MRVM和MSVM概率估计比较
实验1使用的数据为分布已知的四类二维正态分布人工数据集,各类别的参数分布如表 1所示.
| 类别 | 先验概率 | 均值向量 | 协方差矩阵 |
| C1 | 
|
||
| C2 |  |
||
| C3 | 
|
||
| C4 | 
|
||
根据表中的参数分布随机产生参与训练的每类数据样本400个,训练数据共1 600个,参与测试的每类数据样本300个,测试数据共1 200个.训练数据分布如图 2所示.

|
| 图 2 训练数据分布图 Figure 2 Training data distribution |
为了验证本文所提多类分类模型后验概率估计的准确性和有效性,分别用MRVM (OVA)、MSVM (OVA)、MRVM (OVO)、MSVM (OVO) 方法对人工数据集进行分类实验,分别得到分类正确率为83.30%、83.20%、84.05%、84.25%,并统计各个分类器估计的测试样本属于每个类别的概率.为了便于比较估计概率与真实概率之间的差异,需要计算样本属于某类别的真实概率.已知类先验概率P(Ci),i=1,2,…,k和类条件概率密度p(x|Ci),i=1,2,…,k,当给定测试样本x时,利用贝叶斯公式可计算其理论上属于Ci类的概率为
|
(23) |
图 3和图 4分别给出了用MSVM与MRVM估计的测试样本属于每一类的概率与真实概率的对角线图.

|
| 图 3 MSVM (OVA) 与MRVM (OVA) 估计概率与真实概率对角线图 Figure 3 The estimated probability and the real probability diagonal diagram by MSVM (OVA) and MRVM (OVA) |

|
| 图 4 MSVM (OVO) 与MRVM (OVO) 估计概率与真实概率对角线图 Figure 4 The estimated probability and the real probability diagonal diagram by MSVM (OVO) and MRVM (OVO) |
从图中可以看出样本后验概率分布越接近对角线,表示估计的概率与真实概率之间的差别越小,概率估计越准确. MRVM估计的概率远比MSVM估计的概率更接近真实值,可以为分类决策提供更精确、更有参考价值的信息.
2) 实验2:融合识别性能对比
实验2所使用的数据为平底锥柱体弹头、平底锥诱饵、球体锥诱饵三类目标在步进频率雷达下的全姿态HRRP仿真数据,用于验证本文所提融合识别方法的有效性.雷达工作频率范围为8.75~10.75 GHz,步进频率间隔为15.625 MHz,共有128个频率采样点.目标俯仰角为90°,方位角范围为0~180°,方位角采样间隔为0.1°,采样数为1 801,每个角度的HRRP样本数据共256维.采用三类目标的10~30°,40~60°,70~90°,110~130°,140~160°范围内的HRRP数据用于实验.为了得到更多的样本数据,本文采用每个训练数据集相邻角度范围内平均HRRP作为插值样本,此时相当于方位角采样间隔为0.05°,每个数据集含有三类目标各401个样本,共1 203个样本.
为了验证本文所提融合识别方法的有效性,将本文方法与多数投票融合法、加权投票融合法、MSVM_DS进行比较.加权投票融合法采用文[2]中基于混淆矩阵来衡量每个分类器对不同类别样本的分类能力,进而计算权值矩阵实现加权投票,多数投票法与加权投票法采用的基分类器都是3个MSVM (OVA) 或MSVM (OVO).分别对不同角域数据集提取的三种特征进行10折交叉验证分类融合识别,并利用双边检验法来计算置信水平为0.95的分类错误率置信区间. 表 2和表 3分别给出了基于一对多多类分类模型和一对一多类分类模型构造基分类器,并采用不同融合识别方法的实验结果.
| 角度范围 | 特征 | MSVM (OVA) | 多数投票法 | 加权投票融合法 | MSVM_DS (OVA) | MRVM (OVA) | MRVM_DS (OVA) |
| 径向长度 | 82.38±2.41 | 82.38±3.60 | |||||
| 10~30° | 散射中心数 | 42.39±4.22 | 80.80±1.21 | 85.37±2.07 | 86.29±3.54 | 43.72±3.48 | 91.69±1.63 |
| 中心距 | 78.89±2.79 | 80.13±3.33 | |||||
| 径向长度 | 62.43±2.33 | 64.42±1.79 | |||||
| 40~60° | 散射中心数 | 47.30±2.14 | 62.09±2.32 | 64.92±2.55 | 65.41±2.60 | 48.55±2.59 | 69.49±2.76 |
| 中心距 | 57.77±2.71 | 60.26±2.34 | |||||
| 径向长度 | 45.30±2.71 | 47.38±3.06 | |||||
| 70~90° | 散射中心数 | 43.48±3.37 | 48.13±3.33 | 50.95±2.84 | 50.54±3.22 | 44.22±1.90 | 51.38±3.69 |
| 中心距 | 48.29±2.66 | 49.79±1.98 | |||||
| 径向长度 | 74.56±1.70 | 74.73±2.20 | |||||
| 110~130° | 散射中心数 | 68.16±2.59 | 75.89±2.21 | 77.73±2.31 | 76.06±1.21 | 69.91±3.70 | 78.89±1.16 |
| 中心距 | 65.75±1.78 | 67.00±2.22 | |||||
| 径向长度 | 90.69±1.85 | 90.94±2.12 | |||||
| 140~160° | 散射中心数 | 74.56±3.69 | 90.27±1.67 | 92.270±1.38 | 92.35±2.00 | 73.73±3.68 | 92.85±1.61 |
| 中心距 | 74.40±1.79 | 75.73±2.15 |
| 角度范围 | 特征 | MSVM (OVO) | 多数投票法 | 加权投票融合法 | MSVM_DS (OVO) | MRVM (OVO) | MRVM_DS (OVO) |
| 径向长度 | 82.46±2.25 | 83.46±2.21 | |||||
| 10~30° | 散射中心数 | 43.48±3.65 | 81.13±1.98 | 86.95±2.30 | 87.70±1.77 | 43.31±2.96 | 91.78±2.37 |
| 中心距 | 79.72±1.60 | 80.22±2.93 | |||||
| 径向长度 | 63.93±1.60 | 65.00±2.64 | |||||
| 40~60° | 散射中心数 | 48.30±1.92 | 64.09±2.27 | 65.75±2.74 | 68.41±1.23 | 45.64±4.16 | 70.99±2.66 |
| 中心距 | 60.68±2.21 | 59.76±2.63 | |||||
| 径向长度 | 46.96±2.71 | 47.05±2.94 | |||||
| 70~90° | 散射中心数 | 41.97±2.71 | 48.80±1.90 | 51.28±3.00 | 51.45±2.47 | 42.81±2.32 | 51.70±2.98 |
| 中心距 | 49.54±3.45 | 48.54±2.97 | |||||
| 径向长度 | 74.24±2.81 | 73.74±2.53 | |||||
| 110~130° | 散射中心数 | 69.46±1.63 | 76.65±1.79 | 77.96±2.54 | 77.06±2.44 | 69.66±1.65 | 78.89±2.90 |
| 中心距 | 67.42±2.18 | 67.75±3.15 | |||||
| 径向长度 | 90.93±1.48 | 90.44±1.36 | |||||
| 140~160° | 散射中心数 | 74.97±2.25 | 90.02±1.80 | 92.76±0.76 | 93.85±1.20 | 73.81±1.72 | 93.18±1.40 |
| 中心距 | 75.64±1.34 | 74.81±1.81 |
分析表 2和表 3,可以看出MRVM (OVA) 和MSVM (OVA) 分类器的分类精度相当,MRVM (OVO) 和MSVM (OVO) 分类器的分类精度相当,本文提出的MRVM_DS (OVA)、MRVM_DS (OVO) 方法比相应MSVM_DS (OVA)、MSVM_DS (OVO) 以及两种投票融合法的识别正确率高,MRVM_DS (OVO) 方法的融合识别效果比MRVM_DS (OVA) 方法较好.这充分说明了利用RVM输出的概率信息的重要性和优越性,其原因在于二分类SVM分类时是非此即彼的“硬判决”输出,输出结果的可解释性比较差,采用Sigmoid函数只是将SVM的输出映射到[0,1],并没有真正反映样本的后验概率,而二分类RVM输出的后验概率信息比较真实地反应了样本隶属于某一类的概率,有效度量了分类过程中存在的不确定性.经过本文所提的方法扩展的MRVM估计的概率远比MSVM估计的概率准确,采用MRVM输出的概率信息构造DS的BPA函数比MSVM更加简便、合理、准确,进而导致MRVM_DS的融合识别效果更好. MRVM输出的后验概率可以为分类决策提供更精确、更有参考价值的信息,充分重视并有效利用这些信息对提高系统识别性能具有重要价值.
5 结束语多特征融合识别可以有效提高目标识别正确率.本文将RVM二类分类模型扩展为多类分类模型MRVM并实现概率输出,利用MRVM输出的样本后验概率信息,解决了用DS证据理论进行融合时基本概率赋值获取困难的问题,从而提出一种结合MRVM和DS的弹道目标HRRP融合识别方法.该方法利用MRVM输出的分类结果信息获取基本概率赋值,实现了HRRP分类过程中的不确定信息融合识别,仿真实验结果表明MRVM估计的样本后验概率更准确,融合识别后的正确率更高.
| [1] | 周万幸. 弹道导弹雷达目标识别技术[M]. 北京: 电子工业出版社, 2011. Zhou W X. BMD radar target recognition technology[M]. Beijing: Publishing House of Electronics Industry, 2011. |
| [2] | 张学峰, 王鹏辉, 冯博, 等. 基于多分类器融合的雷达高分辨距离像目标识别与拒判新方法[J]. 自动化学报, 2014, 40 (2): 348–356. Zhang X F, Wang P H, Feng B, et al. A new method to improve radar HRRP recognition and outlier rejection performances based on classifier combination[J]. Acta Automatica Sinica, 2014, 40 (2): 348–356. |
| [3] | 蕾蕾, 王晓丹, 邢雅琼, 等. 结合SVM和DS证据理论的多极化HRRP分类研究[J]. 控制与决策, 2013, 28 (6): 861–866. Lei L, Wang X D, Xing Y Q, et al. Multi-polarized HRRP classification by SVM and DS evidence theory[J]. Control and Decision, 2013, 28 (6): 861–866. |
| [4] | 张平定, 孙佳佳, 童创明, 等. 弹道中段目标雷达综合识别研究[J]. 微波学报, 2015, 31 (2): 20–23, 44. Zhang D P, Sun J J, Tong C M, et al. Integrated target recognition of ballistic midcourse target[J]. Journal of Microwaves, 2015, 31 (2): 20–23, 44. |
| [5] | Jdey I, Toumi A, Khenchaf A, et al. Fuzzy fusion system for radar target recognition[J]. International Journal of Computer Applications in Technology, 2012, 1 (1): 136–141. |
| [6] | Liu H, Li S. Decision fusion of sparse representation and support vector machine for SAR image target recognition[J]. Neurocomputing, 2013, 113 (7): 97–104. |
| [7] | Cho H, Chun J, Song S, et al. Radar target classification using the relevance vector machine[C]//2014 IEEE Radar Conference. Piscataway, NJ, USA:IEEE, 2014:1333-1336. |
| [8] | Tipping M E. The relevance vector machine[J]. Advances in Neural Information Processing Systems, 1999, 12 (3): 652–658. |
| [9] | Tipping M E. Sparse Bayesian learning and the relevance vector machine[J]. Journal of Machine Learning Research, 2001, 1 (3): 211–244. |
| [10] | Bishop C M, Tipping M E. Variational relevance vector machines[J]. Eprint Arxiv, 2002, 28 (3): 46–53. |
| [11] | Mianji F A, Zhang Y. Robust hyperspectral classification using relevance vector machine[J]. IEEE Transactions on Geoscience & Remote Sensing, 2011, 49 (6): 2100–2112. |
| [12] | Meng Q F, Chen Y H, Zhang Q, et al. Local prediction of network traffic measurements data based on relevance vector machine[M]//Advances in Neural Networks. Berlin, Germany:Springer, 2013:606-613. |
| [13] | He W H, Guo Y, Yow K C. Recognition of human activities using a multiclass relevance vector machine[J]. Optical Engineering, 2012, 51 (1): 017202. DOI:10.1117/1.OE.51.1.017202 |
| [14] | Foody G M. RVM-based multi-class classification of remotely sensed data[J]. International Journal of Remote Sensing, 2008, 29 (6): 1817–1823. DOI:10.1080/01431160701822115 |
| [15] | Wu T F, Lin C J, Weng R C. Probability estimates for multi-class classification by pairwise coupling[J]. Journal of Machine Learning Research, 2004, 5 (4): 975–1005. |
| [16] | Chang C C, Lin C J. LIBSVM:A library for support vector machines[J]. Acm Transactions on Intelligent Systems & Technology, 2011, 2 (3): 389–396. |
| [17] | 韩德强, 杨艺, 韩崇昭. DS证据理论研究进展及相关问题探讨[J]. 控制与决策, 2014, 29 (1): 1–11. Han D Q, Yang Y, Han C Z. Advances in DS evidence theory and related discussions[J]. Control and Decision, 2014, 29 (1): 1–11. |
| [18] | 李丽亚.宽带雷达目标识别技术研究[D].西安:西安电子科技大学, 2009. Li Y L. Study on wideband radar target recognition[D]. Xi'an:Xidian University, 2009. |
| [19] | 冯博, 杜兰, 张学峰, 等. 基于字典学习的雷达高分辨距离像目标识别[J]. 电波科学学报, 2012, 27 (5): 897–905. Feng B, Du L, Zhang X F, et al. Radar HRRP target recognition based on dictionary learning[J]. Chinese Journal of Radar Science, 2012, 27 (5): 897–905. |
| [20] | Liao K, Yang W. Extraction of radar target length based on high resolution range profile[C]//2010 International Conference on Electrical and Control Engineering. Piscataway, NJ, USA:IEEE, 2010:956-959 |
| [21] | Liu M J, Zou Z F, Hao M. Radar target recognition based on combined features of high range resolution profiles[C]//20092nd Asian-Pacific Conference on Synthetic Aperture Radar. Piscataway, NJ, USA:IEEE, 2009:876-879 |
| [22] | Platt J C. Probabilistic outputs for support vector machines and comparisons to regularized likelihood methods[J]. Advances in Large Margin Classifiers, 1999, 10 : 61–74. |
| [23] | Tipping M E. Sparse Bayesian models (and the RVM)[EB/OL].(2005-02-12)[2006-10-12]. http://www.miketipping.com/sparsebayes.htm. |