



2. 鹤壁天海电子信息系统有限公司, 河南 鹤壁 458030
2. Hebi Tianhai Electronic Information System Co. Ltd., Hebi 458030, China
1 引言
随着NCS规模的不断扩大,结构复杂性的不断提高,系统模型的不确定性、外界的干扰及信息在网络中传输时不可避免的时延、丢包等问题的影响也越来越明显,因此对NCS的可靠性、安全性的需求将越来越高.近年来针对具有时延或丢包的不确定NCS容错控制问题的研究受到人们的广泛关注[1-4].
容错控制主要分为被动容错控制 (PFTC) 和主动容错控制 (AFTC). PFTC是利用鲁棒控制技术使系统对集内故障不敏感,但是由于系统正常和故障时控制器是同一个控制增益,保守性较大.文[5-8]所提出的AFTC方法是针对在线估计故障结果重组或重构新的控制器,由于在线估计故障和控制器的重组或重构需要时间,因此AFTC实时性较差.文[9-11]引入离散事件触发机制,通过给定事件触发条件并判断该条件成立与否决定信息是否传输,而网络诱导时延产生的根本原因是有限的网络带宽,因此可以明显降低通讯负载并维持系统稳定.目前针对事件触发机制下的NCS容错控制的研究主要集中在PFTC及滤波器的设计[12-13]上,而主被动混合鲁棒容错控制的研究还未有报道.由此,为了有效地节约网络资源并结合主动和被动的优缺点设计基于事件触发机制的混合鲁棒容错控制器就可能成为人们研究的主要方向.
本文首先通过离线设计正常控制器和被动容错控制器,前者使系统在正常运行时具有良好的动态性能,后者不仅对故障集内的故障能够有效容错,而且对故障集外的未知故障可以减缓系统性能的下降;其次根据鲁棒故障观测器实时检测的故障信息设计自适应补偿控制器维持系统稳定;整个过程中所设计的鲁棒H∞控制器都可使系统有效抑制扰动并且满足广义H∞性能指标.由于该系统涉及多个控制器的切换,遂设计专用切换函数实现了控制器间的平滑切换.最后通过仿真算例验证了该设计的有效性和可行性.
2 系统的描述 2.1 闭环系统故障模型的建立考虑如下的线性NCS模型:
|
(1) |
其中,x(t)∈Rn,u(t)∈Rm,y(t)∈RP分别为系统的状态变量、控制输入、测量输出;f(t)∈Rr为执行器故障信号,在故障发生前值为0,故障发生后为定值向量;w(t)∈L2[0,T) 为有限能量扰动输入;A、B、C、D、E是已知适当维数的常数矩阵;ΔA(t)、ΔB(t) 是范数有界的时变参数不确定性矩阵,满足:

|
(2) |
式中,M、N1、N2是已知的适当维数常数矩阵,F(t) 是元素Lebesgue可测的未知时变实值连续矩阵函数,满足FT(t)F(t)≤I.
设f(t) 是一个附加信号,代表执行器故障,f(t) 为加性故障,满足f(t)≤f0.若系统有m个执行器,则:

|
(3) |
其中,
定义故障分布矩阵为E=-(B+ΔB),由于f(t) 是执行器故障,可以令Lu(t)=u(t)-f(t),其中L=diag{l1,…,lm},lq∈[0,1],q=1,2,…,m. lq=0表示第q个执行器完全失效,lq=1表示第q个执行器正常,lq∈(0,1) 表示执行器部分失效. L是未知的常数矩阵.由此可将闭环系统由式 (1) 转化为式 (4) 及式 (5):
|
(4) |

|
(5) |
显然故障模型 (4) 与故障模型 (5) 等价,即式 (5) 与式 (1) 等价.文中将通过以上两个等价的线性NCS故障模型分别设计故障诊断观测器与状态反馈容错控制器.
假设[14]系统完全可测,控制器、执行器由事件驱动,传感器由时间驱动;传感器到控制器、控制器到执行器及传感器到观测器、观测器到执行器的时延最大值设为τ1(t).
2.2 事件触发机制的引入采用文[15]创建的事件触发机制:

|
其中,ex(ikh)=x(ikh)-x(tkh),h为采样周期,{tkh|tk∈N}表示信息传递时刻的集合,两次数据传递时刻的时间间隔用
取τ2(t)、τ1(t) 中最大值τ(t) 为网络传输时延,τM、τm为τ(t) 的最大值和最小值,令τs=τM-τm.由此得状态反馈控制器为

|
(6) |
引理1[16] 对任意恒定对称矩阵Z∈Rn×n,Z=ZT>0标量δ>0,矢量函数:[-δ,0]→Rn定义以下积分项:
|
引理2[17] 假设f1,f2,…,fN:Rm→R在开集D的子集中有正值,D⊂Rm,那么在集合D中fi的相互凸组合满足:

|
其中,
引理3[18] 给定适当维数的矩阵Y、M、E,其中Y是对称的,则:

|
设故障检测观测器设计如下:
|
(7) |
定义残差、状态估计误差和残差误差为

|
(8) |

|
(9) |

|
(10) |
其中,
基于观测器估计故障的方法是借助于H∞控制的思想,即观测器与实际系统的残差误差满足如下关系:

|
γ1、γ2为给定常数,它们的选取应使估计故障受故障的影响尽可能的大,同时又对外界扰动具有一定的鲁棒性.由此,定义广义H∞性能指标为

|
(11) |
定理1 给定正定标量τm、τM、α、β、γ1、γ2、ε,如果存在正定对称矩阵P、V、W满足线性矩阵不等式:
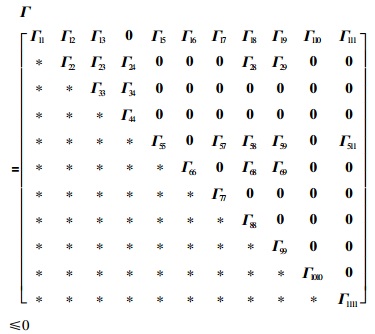
|
(12) |
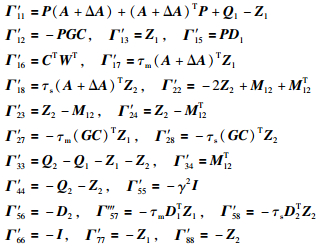
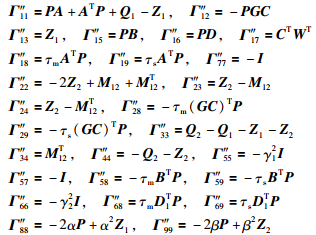
式中,
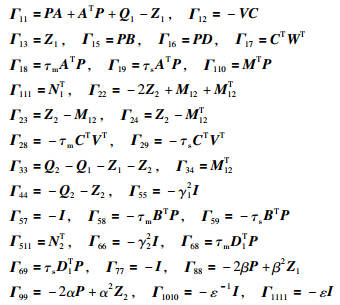
|
则故障诊断观测器可使故障估计误差满足‖re(t)‖2≤γ12‖f(t)‖2+γ22‖w(t)‖2且观测器增益为G=P-1V.
证明 由式 (1)、式 (7) 和式 (9) 得

|
(13) |
令D1=[-B-ΔB D],w1=[f(t) w(t)]T,D2=[I 0],γ=diag{γ1,γ2},得

|
(14) |

|
(15) |
选取Lyapunov-Krasovskii泛函如下:
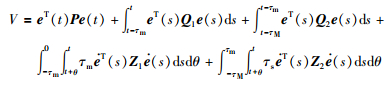
|
沿着式 (13) 对V求导得
|
证明方法同文[8],取:
|
其中,ζ=[(A+ΔA)-GC 0 0-D1].
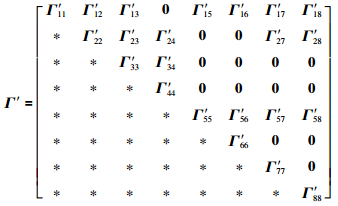
由式 (14) 和式 (15) 得

|
(16) |
|
|
对Γ′两边同乘diag{I,I,I,I,I,I,PZ1-1,PZ1-1}及其转置并且由:

|
得
|
将D1=[B+ΔB D],D2=[I 0],γ=diag{γ1,γ2}代回,并根据引理3,将Γ″转化为
|
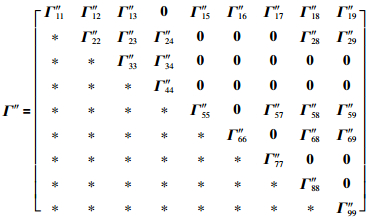
|
|
由Γ″=Γ""+εM′M′T+ε-1ETE,对Γ″再次应用Schur补,并令PG=V,得Γ.因此式 (16) 转化为

|
(17) |
当w(t)=0,f(t)=0时,若满足Γ < 0,则

|
成立,对其两边积分可得

|
在零初始条件下,当t→∞时,有:

|
即‖re(t)‖2≤γ1‖f(t)‖2+γ2‖w(t)‖2.由此可得误差系统 (10) 具有γ扰动抑制性能.
注1 误差估计信号受故障变化和未知扰动的影响,观测器 (6) 的设计可以保证残差对故障的灵敏度、对于未知输入和模型不确定性的鲁棒性;将观测器估计的故障值用于重构控制律,即以下的容错控制设计方法.
4 容错控制器的设计本文考虑采用的混合容错控制器组成如下:
|
(18) |
其中,F+为 (B+ΔB) 的右伪逆,
首先采用正常的状态反馈控制器:

|
KN为反馈控制增益,使系统在正常运行时有良好的动态性能;在系统发生故障集内故障或者故障集外故障初期,控制器切换至uP(t)=KPx(tKh),以保证在系统发生故障集内故障时具有H∞稳定性能,故障集外故障时减缓系统恶化.同时根据观测器检测的故障信号设计自适应补偿控制器
首先针对闭环故障模型 (5) 设计被动控制器增益KP和事件触发条件矩阵,由式 (2) 可得被动容错控制器形式:

|
(19) |
对于给定的常数γ定义如下性能指标:

|
(20) |
定理2 给定正数τm、τM、δ(δ∈[0,1)),若存在正定对称矩阵X,矩阵Ri>0(i=1,2,…,5) 及Y、V,对于任意可能的执行器失效故障L及可接受的参数不确定性,满足如下线性矩阵不等式:
|
(21) |
其中,*表示由矩阵的对称性得到的矩阵块,

|
则存在状态反馈律 (19) 使得基于事件触发的线性不确定故障NCS (5) 存在有限能量扰动时是渐近稳定的且具有一定的γ扰动抑制性能,控制器增益可通过K=YX-1求取.
证明 构造李亚普诺夫泛函:
|
沿着式 (5) 对V求导得
|
(22) |
令:

|
对于传输机制ikh∈[tkh,tk+1h),有:

|
同时根据引理1、2可得
|
其中,

|
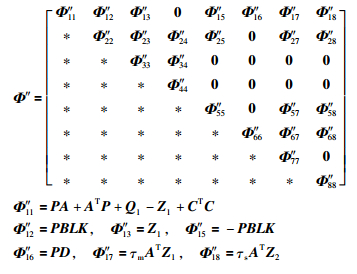
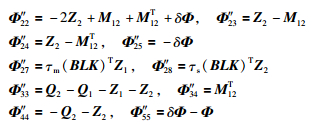
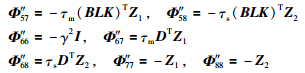
将式 (22) 整理得
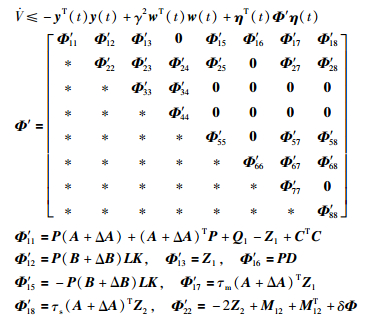
|
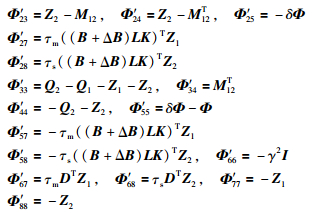
|
当w(t)=0时,若满足Φ′ < 0,则

|
成立,对其两边积分可得

|
在零初始条件下,当t→∞时,则有:

|
即‖y(t)‖2≤γ‖w(t)‖2,由此可得故障模型 (4) 具有γ扰动抑制性能.
由引理3得
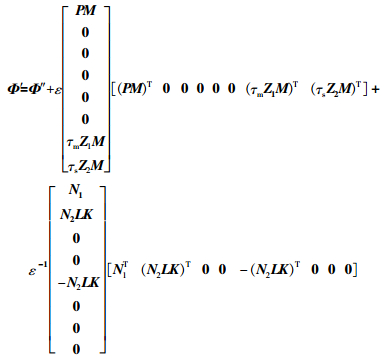
|
(23) |
|
|
|
由式 (23) 知,对Φ″运用Schur补并两边同时乘以diag{I,I,I,I,I,I,PZ1-1,PZ2-1,I,I}得
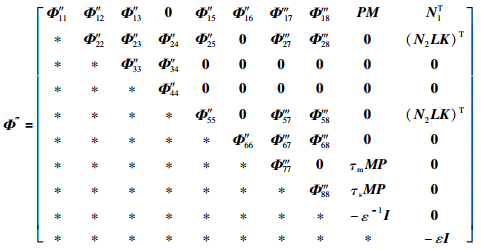
|
(24) |
|
对式 (24) 两边同时乘以diag{P-1,P-1,P-1,P-1,P-1,P-1,P-1,P-1,I,I}及它们的转置X=P-1,KX=Y,Φ-1=V且有:
|
并再次应用Schur补,即可得到矩阵不等式 (21) 且控制器增益为K=YX-1.
注2 被动容错控制器的求解中,当失效因子L为单位矩阵时,可得到正常控制器增益KN.
通过上述离线设计的状态反馈控制器,保证NCS在发生故障初期系统稳定的同时,利用定理1设计的故障诊断观测器实时在线检测执行器的状态,根据其估计的故障大小重构控制器,补偿故障的影响.
由式 (18) 基于故障诊断观测器的混合容错补偿控制器可得

|
(25) |
uP(t) 通过定理2设计.将式 (25) 代入式 (1) 得

|
整理得
|
(26) |
由定理1知,故障诊断观测器的设计满足:

|
由定理2知uP(t) 使系统 (5) H∞稳定,所以式 (26) 是渐近稳定的.
5 切换函数的设计当不同的控制器需要切换时,若控制器的输出值不同则切换时必然存在抖动,为了尽可能的减少切换抖动,应尽量的减少两个相应的控制器输出的差值,在这里引入一种平滑切换函数.
假设在t0时刻,由控制器增益KN切换至KP,利用如下切换函数[19-20]:

|
其中σ取决于动态闭环系统,该切换过程可以保证由控制器增益KN至KP的平滑切换.
证明 由式 (4)、式 (5) 可得控制器切换前后闭环系统模型:
|
(27) |
控制器平滑切换目标可以转化为控制器切换时满足如下条件:

|
(28) |
定义e=xN(t)-xP(t) 由式 (5.18) 两式相减可得
|
将式 (27) 代入整理可得
|
当t→t0时,上式可转化为

|
(29) |
式 (20) 可转化为以下两式的差:
|
(30) |
由式 (19) 同理可得KN(t) 可使系统状态渐近稳定,而切换前提是在系统进入渐近稳定状态下进行的,因此当式 (30) 中的2个公式取相同t值时是可以满足式 (28) 的.
6 仿真算例分析针对线性NCS模型 (1),选取:
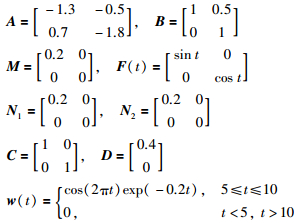
|
系统初始状态取x(0)=[2, 2]T.设采样周期为h=0.05 s,τm=0.1,τM=0.25,则τs=0.15.取参数α=0.2,β=0.4,δ=0.1,γ1=0.2,γ2=1.
根据定理2,取

|
取故障集内失效因子为
|
求得被动容错控制器以及事件触发条件参数矩阵分别为

|
再由定理1,可求得观测器的增益矩阵以及残差增益矩阵分别为

|
假设5 s以前系统可以正常运行,运行至5 s时执行器发生故障集内故障,运行至8 s时执行器发生故障集外故障
通过仿真实验,由故障诊断观测器估计的故障如图 1所示.当发生故障集内故障和故障集外故障时,主动容错控制、被动容错控制及混合容错控制对不同类型故障的容错效果及其对比如图 2、图 3所示,引入切换函数对系统状态的影响对比如图 4、图 5所示,其中s1、s2、s3、s4分别代表被动容错、主动容错及混合容错控制下引入平滑切换函数与没有引入平滑切换函数的状态响应曲线.最后图 6为混合容错控制下闭环系统的事件触发图.

|
| 图 1 故障估计图 Figure 1 Fault estimation curve |

|
| 图 2 x1状态下容错控制比较 Figure 2 Comparison of the fault-tolerant control in the state x1 |

|
| 图 3 x2状态下容错控制比较 Figure 3 Comparison of the fault-tolerant control in the state x2 |

|
| 图 4 x1状态下有无切换容错控制比较 Figure 4 Comparison of the fault-tolerant control in the state x1 with and without switching intervals |

|
| 图 5 x2状态下有无切换容错控制比较 Figure 5 Comparison of the fault-tolerant control in the state x2 with and without switching intervals |

|
| 图 6 事件触发机制下NCS的传输时刻与时间间隔 Figure 6 Release instants and release interval using the DETCS |
由图 1可以看出,本文提出的故障估计方法能够有效的估计故障大小,但是由于时延的存在,故障的估计有一定的滞后.由图 2、图 3系统在3种不同容错控制下的状态响应曲线可以看出,当没有发生故障时,AFTC的动态性能都优于PFTC;当发生故障集内故障时PFTC有良好的容错能力,而AFTC的故障诊断及重构控制器需要一定的时间,所以有明显的抖动;当发生故障集外的故障时,PFTC失去了容错能力,AFTC虽然会有一些抖动但最终可以使系统保持稳定;而混合容错控制结合了两者的优点,
不仅在系统无故障时有良好的动态性能,当发生故障集内故障时,系统切换至PFTC可以有良好的容错能力,当发生故障集外故障初期时,混合容错控制采用的被动容错控制器虽然失去了容错能力但是有减缓系统性能恶化的作用,为故障检测观测器估计故障提供了一定时间,最后根据估计的故障重构自适应补偿控制器,继续维持系统稳定.
由图 4和图 5可以看出在5.2 s处混合容错控制器由增益KN切换至KP,其中s3代表的混合容错控制采用了平滑切换函数,可以实现平滑切换;s4代表的混合容错控制没有采用切换函数,有明显的抖动.
图 6为混合容错控制信息发送时刻图,横轴代表信息传输时刻.纵轴代表信息发送周期,从图 6可以看出文中所引用的事件触发条件在混合控制中有效地节约了网络资源.
7 总结本文针对具有时变时延的不确定线性NCS运行的不同时刻,在外部有限能量扰动的情况下,基于事件触发机制,设计主—被动混合鲁棒H∞容错控制器,使得系统无论是在正常运行还是发生执行器任意故障状态下,不但渐近稳定而且具有良好的扰动抑制性能.仿真结果表明,本文所提的方法是有效的.下一步的工作重点是研究如何将事件触发机制引入故障检测回路,更进一步节约网络资源并及时有效检测故障的方法.
| [1] | Yan H, Yan S, Zhang H, et al. An overview of networked control of complex dynamic systems[C/OL]//Mathematical problems in Engineering. (2014-04-03)[2015-12-02]. http://dx.doi.org/10.1155/2014/794096. |
| [2] | Dong Z, Ma Y. A Robust fault detection approach in network control systems with short time delay[M]//Information Computing and Applications:vol.4953.Berlin, Germany:Springer-Verlag, 2013:450-459. |
| [3] | Li Y J, Li W. Discrete event-triggered robust fault-tolerant control for nonlinear networked control systems with alpha-safety degree and actuator saturation[C/OL]//Mathematical Problems in Engineering. (2015-05-04)[2015-12-31]. http://dx.doi.org/10.1155/2015/590598. |
| [4] | Zhao M Y, Liu H P, Li Z J, et al. Fault tolerant control for networked control systems with access constraints[J]. Acta Automatica Sinica, 2012, 38(7): 1119–1126. |
| [5] | 霍泽云, 钟麦英, 董全超. 一类线性不确定系统的主动容错H∞控制[J]. 控制工程, 2008, 15(4): 474–477. Huo Z Y, Zhong M Y, Dong Q C. Active fault tolerant H∞ control for uncertain linear systems[J]. Control Engineering, 2008, 15(4): 474–477. |
| [6] | Yang F, Zhang H, Jiang B, et al. Adaptive reconfigurable control of systems with time-varying delay against unknown actuator faults[J]. International Journal of Adaptive Control and Signal Processing, 2014, 28(11): 1206–1226. DOI:10.1002/acs.v28.11 |
| [7] | Sui S, Tong S C, Li Y M. Adaptive fuzzy fault-tolerant output feedback tracking control of uncertain stochastic nonlinear systems with unknown time-delay and tracking error constrained[C/OL]//Journal of Applied Mathematics. (2014-11-05)[2015-03-08]. http://dx.doi.org/10.1155/2014/703609. |
| [8] | Wu J L, Karimi H R, Tian S Q. Robust H∞ filtering for stochastic networked control systems[C]//Chinese Control Conference. Piscataway, NJ, USA:IEEE, 2014:4331-4336. |
| [9] | Yan S, Yan H C, Shi H B, et al. Event-triggered H∞ filtering for networked control systems with time-varying delay[C]//Chinese Control Conference. Piscataway, NJ, USA:IEEE, 2014:5869-5874. |
| [10] | Zhai Y M, Yan R X, Liu H F, et al. Event-triggered reliable control in networked control systems with probabilistic actuator faults[C/OL]//Mathematical Problems in Engineering. (2013-05-04)[2015-04-23]. http://dx.doi.org/10.1155/2013/131942. |
| [11] | Liu J L, Yue D. Event-triggering in networked systems with probabilistic sensor and actuator faults[J]. Information Sciences, 2013, 240(10): 145–160. |
| [12] | Chen Y Q, Lu W. Fault detection filter design for networked control system with network delay[C]//Control and Decision Conference. Piscataway, NJ, USA:IEEE, 2013:3962-3967. |
| [13] | Ma A J, Wang Q, Dong C Y, et al. Fault detection for networked control systems based on dynamic feedback observer[C]//Control and Decision Conference. Piscataway, NJ, USA:IEEE, 2013:4995-4998. |
| [14] | 王君, 李淑真, 李炜. 基于事件触发的线性网络化控制系统主-被动混合容错控制设计[J]. 上海应用技术学院学报:自然科学版, 2015, 15(2): 178–184. Wang J, Li S Z, Li W. Design of hybrid fault-tolerant networked control system based on event-triggered scheme[J]. Journal of Shanghai Institute of Applied Technology:Natural Sciences, 2015, 15(2): 178–184. |
| [15] | 李炜, 赵莉, 蒋栋年, 等. 基于事件触发的NCS鲁棒完整性设计[J]. 兰州理工大学学报, 2014, 40(1): 74–79. Li W, Zhao L, Jiang D N, et al. Design of networked control system with robust integrity based on event-triggered scheme[J]. Journal of Lanzhou University of Technology, 2014, 40(1): 74–79. |
| [16] | Jiang X F, Han Q L, Liu S R, et al. A new H∞stabilization criterion for networked control systems[J]. IEEE Transactions on Automatica Control, 2008, 53(4): 1025–1032. DOI:10.1109/TAC.2008.919547 |
| [17] | Poo G P, Jeong W K, Changki J. Reciprocally convex approach to stability of systems with time-varying delays[J]. Automatica, 2011, 47(1): 235–238. DOI:10.1016/j.automatica.2010.10.014 |
| [18] | Xie L H. Output feedback H∞control of systems with parameter uncertainty[J]. International Journal of Control, 1996, 63(4): 741–750. DOI:10.1080/00207179608921866 |
| [19] | 曾家有, 陈洁, 赵红超. 自适应变结构控制的切换函数研究[J]. 航天控制, 2004, 22(4): 57–61. Zeng J Y, Chen J, Zhao H C. Study on switch function of adaptive variable structure control[J]. Space Control, 2004, 22(4): 57–61. |
| [20] | Yu X, Jiang J. Hybrid fault-tolerant flight control system design against partial actuator failures[J]. IEEE Transactions on Control Systems Technology, 2012, 20(4): 871–886. DOI:10.1109/TCST.2011.2159606 |