



1 引言
自抗扰控制技术是中科院韩京清教授于上世纪90年代提出的一种新型控制方法,该技术的核心思想是利用一个扩张状态观测器 (ESO) 来对被控对象的所有不确定因素进行估计并给予补偿[1-3],从而将系统近似为一个线性系统.然而,2阶的非线性自抗扰控制器就需要调节11个参数,其阶次越高需要调节的参数就越多,因此在实际应用中受到限制.为了解决非线性自抗扰控制器参数过多、配置困难的问题,文[4]提出了线性自抗扰控制器 (LADRC),该控制器将控制参数降到了4个且具有比较明确的物理意义,便于工程应用[5-7].文[8-9]在假设“系统总扰动”满足某种有界性条件下分析了ESO估计误差的收敛性.说明ESO的估计能力是有限的,并且“系统总扰动”通常包含了内部和外部的各种大范围及复杂结构的不确定性,其有界性很难在控制设计前进行判断.文[10]从对象模型已知和模型完全未知的角度研究了线性扩张状态观测器 (LESO) 的估计性能,指出LESO的观测能力与观测器带宽成正比,并且当对象模型部分已知时,LESO具有更好的观测效果.文[11]分析了LADRC中控制器参数b0的调节问题,同时指出参数b0的调节一直影响着参数调节的快速性.然而由于机理建模不够准确及实际信息的测量过程中会引入噪声导致控制增益b0与实际差别很大.
综上所述,被控对象模型参数和控制器增益b0的辨识度一直影响着LESO的估计精度和控制器参数调节的快速性.因此,本文应用N4SID子空间辨识技术对被控系统的内部模型及控制器增益b0进行辨识,将辨识后的模型估计误差和外部干扰作为“系统总扰动”,即系统广义扰动.仿真实验表明,结合N4SID子空间辨识方法的LADRC具有较好的快速性和较强的抗干扰性.
2 N4SID子空间辨识[12]考虑如下线性时不变状态空间模型:
|
(1) |
式中,xk∈Rn,uk∈Rm和yk∈Rl分别是过程在k时刻的状态向量、输入观测向量和输出观测向量.对式 (1) 定义符号:
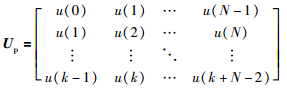
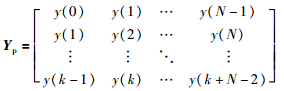
过去输入/输出Hankle矩阵:
|
(2) |
|
(3) |
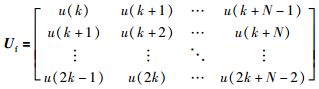
未来输入/输出Hankle矩阵:
|
(4) |
|
(5) |
Toeplitz矩阵:
|
(6) |
扩展可观性矩阵:
|
(7) |
过去状态序列:

|
(8) |
未来状态序列:

|
(9) |
根据式 (1)~式 (9),得到

|
(10) |
|
(11) |
定义:

|
(12) |
考虑如下的下三角正交LQ分解:
|
(13) |
式中,R11、R22为下三角矩阵,R33=0,Q1、Q2正交.从式 (13) 可以得出:

|
(14) |

|
(15) |
从LQ分解可以看出Yf=R31Q1T+R32Q2T,根据式 (15) 及Q1T=R11-1Uf,可以导出:

|
(16) |
比较式 (11) 和式 (16) 可以得出:

|
(17) |
对ξ进行SVD分解,可以得到:

|
(18) |

|
(19) |
|
(20) |
根据上式可以估计出状态序列向量:

|
(21) |
定义N-1维向量:

|
(22) |

|
(23) |

|
(24) |

|
(25) |
根据上述公式可以导出:
|
(26) |
这是一个系统的线性矩阵方程,所以可以使用最小二乘方法估计出系统矩阵参数[13]:

|
(27) |
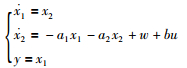
不失一般性,本文考虑具有不确定性的2阶线性定常系统[14],其状态方程描述为
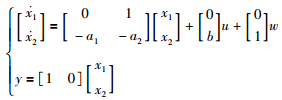
|
(28) |
式中, u为系统的输入;y为输出;w为外部扰动;a1、a2为系统参数,b为控制增益,a1、a2、b未知且有b0≈b.令f(x1,x2,w)=-a1x1-a2x2+(b-b0)u+w为系统广义扰动,其中包含了系统不确定性和外部扰动,将其扩展为系统的状态变量x3=f(x1,x2,w),则系统 (28) 状态方程变为
|
(29) |
式中,x1、x2、x3为系统状态变量,l=ḟ(x1,x2,w).
建立线性扩张状态观测器 (LESO):
|
(30) |
选取合适的观测器增益β1、β2、β3,LESO能实现对系统 (29) 中各状态变量的跟踪[15],即z1→x1,z2→x2,z3→x3.取:

|
(31) |
设计状态反馈控制律[16]:

|
(32) |
式中,v1、v2为线性跟踪微分器 (LTD) 的输出信号;k1、k2为控制器增益参数,选取合适的增益k1、k2可使系统稳定[17]. LTD的表达式为
|
(33) |
式中,yd为给定期望信号,r影响LTD跟踪给定信号的快速性,r越大LTD跟踪速度就越快,但是会降低对输入端高频干扰的抑制能力[18].因此需要根据实际情况选取合适的r.
综上,式 (30)~式 (33) 构成系统 (28) 的线性自抗扰控制器 (LADRC),其结构如图 1所示.

|
| 图 1 线性自抗扰控制器结构图 Figure 1 Structure diagram of the linear active disturbance rejection controller |
经N4SID辨识后得到的系统参数


|
其中,
|
(34) |
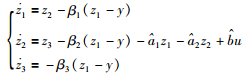
对式 (34) 建立新的线性扩张状态观测器 (LESO):
|
(35) |
令控制律为

|
(36) |
设计新的状态反馈控制律:

|
(37) |
为了简化线性自抗扰控制器参数的整定,根据文[4],令s3+β1s2+β2s+β3=(s+ωo)3即β1=3ωo,β2=3ωo2,β3=ωo3;令s2+k2s+k1=(s+ωc)2,即k1=ωc2,k2=2ωc.一般情况下,增大ωo,观测器的估计效果越好,但是如果ωo过大会增加噪声敏感度,而增大ωc,系统的响应速度变快,然而较大的ωc可能会导致系统不稳定[19].所以,调节ωo和ωc时要考虑系统要求的性能指标与噪声容许量.
4 仿真研究 4.1 模型参数辨识结果选取典型的2阶系统:
|
(38) |
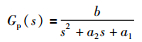
其传递函数为
|
(39) |
假定系统参数a1=389.254,a2=464.027,b=78.619;系统外扰w=sgn (sin (2t)),即幅值为1,周期为π的方波函数.
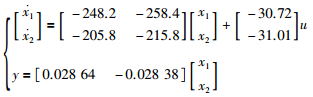
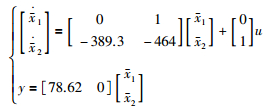
在不引入系统外扰w的前提下,使用Matlab系统辨识工具箱中的N4SID辨识算法对上述被控系统的内部模型参数进行辨识,得到的辨识模型为
|
(40) |
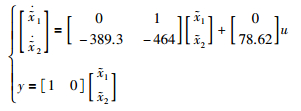
由于式 (40) 不是式 (38) 的规范形式,从式 (40) 中无法得到系统的内部模型参数.根据文[20],先将式 (40) 转化为能控规范型:
|
(41) |
再令
|
(42) |
从式 (42) 中可以看出系统 (38) 的内部模型参数辨识结果为
分别应用传统LADRC方法与本文方法对系统 (38) 进行控制仿真,并研究控制器参数r、ωo、b0固定时,ωc变化对系统输出响应的影响.当r=12,ωo=150,b0=78时,系统输出响应如图 2、图 3所示,控制性能指标如表 1所示.

|
| 图 2 传统LADRC的输出响应 Figure 2 Output response of the traditional LADRC |

|
| 图 3 本文方法的输出响应 Figure 3 Output response of the proposed method |
| 控制方案 | ωc | σ/(%) | ts/s |
| 传统LADRC | 25 | 20.36 | 1.41 |
| 50 | 10.03 | 0.83 | |
| 75 | 1.58 | 0.63 | |
| 100 | 0.17 | 0.53 | |
| 本文控制方法 | 25 | 0 | 0.49 |
| 50 | 0 | 0.44 | |
| 75 | 0 | 0.42 | |
| 100 | 0 | 0.41 |
从图 2和表 1中可以看到,对于传统LADRC方法,当ωc增大时控制器增益变大,系统快速性提高,超调量减小.从图 3中可以看出,对于本文方法,当ωc增大时系统快速性变化不大且都没有超调.本文方法中ωc=25时的控制效果就已达到了传统LADRC中ωc=100时的控制效果,可以看出传统LADRC需要更大的带宽增益才能达到与本文方法相同的控制效果.
4.3 LESO观测效果传统LADRC方法中被观测的扩张状态变量为x3=-a1x1-a2x2+(b-b0)u+w,代入系统参数后x3=-389.254x1-464.027x2+0.619u+sgn (sin (2t)) 而本文方法中被观测的扩张状态变量为


|
| 图 4 传统LADRC的LESO观测效果 Figure 4 LESO observation effect of traditional LADRC |

|
| 图 5 本文方法的LESO观测效果 Figure 5 LESO observation effect of the proposed method |

|
| 图 6 LESO观测误差对比 Figure 6 Comparison of the LESO observation errors |
在实际系统中输出端反馈还会受到传感器噪声的影响,通过对输出端的反馈变量加入高斯白噪声来模拟传感器噪声.另外,还需要考虑输出端受到外部突发扰动的影响,在2 s时刻对输出端加入幅值为0.2、脉宽为0.5 s的矩形波作为突变信号来测试控制器的抗扰性.当ωc=100时,传统LADRC与本文方法的控制效果如图 7所示.从图 7可以看出,对于外部扰动,传统LADRC和本文控制方法都能够使系统回到稳定状态,说明它们都具有一定的抗干扰性能.

|
| 图 7 抗扰性验证响应曲线 Figure 7 Response curves of the disturbance rejection experiment |
在保持控制器参数不变的情况下,将系统 (38) 中参数a1、a2、b分别增加20%和减小20%,进行仿真研究,仿真结果如图 8、图 9所示.

|
| 图 8 系统参数增加20%的响应曲线 Figure 8 Response curves of the system parameters increased by 20% |

|
| 图 9 系统参数减小20%的响应曲线 Figure 9 Response curves of the system parameters reduced by 20% |
图 8、图 9表明,在控制器参数没有改变的情况下,尽管参数a1、a2、b同时变化±20%,但系统的输出响应曲线基本没有改变,说明本文方法与传统LADRC一样对被控对象参数的摄动有很强的鲁棒性.
5 结论本文将N4SID子空间辨识方法与自抗扰控制技术相结合,利用子空间辨识方法对被控系统的未知模型参数及LADRC控制器增益b0进行辨识,并指出该方法有利于减小被控系统的扩张状态变量,即系统的广义扰动,而系统广义扰动的减小能明显提高LESO的估计精度并且改善传统LADRC的控制效果.虽然增大ωc同样能提高LADRC的控制效果,但是实际中过大的ωc可能会导致系统不稳定.最后,通过仿真实验验证了本文提出的方法与传统LADRC一样具有一定的抗干扰性和鲁棒性.由于N4SID子空间辨识方法是一种针对线性系统状态空间模型的辨识方法,所以还无法处理具有非线性动态的对象,这是本文方法的缺陷.对于具有非线性动态的对象如何改善传统LADRC的控制效果将是本文未来的研究方向.
| [1] | 韩京清. 一类不确定对象的扩张状态观测器[J]. 控制与决策, 1995, 10(1): 85–88. Han J Q. The "extended state observer" of a class of uncertain systems[J]. Control and Decision, 1995, 10(1): 85–88. |
| [2] | Han J Q. Active disturbance rejection control technology-The control technology for estimating and compensating the uncertainties[M]. Beijing: China Defensive Industry Press, 2008: 183-184. |
| [3] | Han J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900–906. DOI:10.1109/TIE.2008.2011621 |
| [4] | Gao Z Q. Scaling and bandwidth-parameterization based controller-tuning[C]//Proceedings of the 2003 American Control Conferece. Piscataway, NJ, USA:IEEE, 2003:4989-4996. |
| [5] | 薛文超, 黄朝东, 黄一. 飞行制导一体化设计方法综述[J]. 控制理论与应用, 2013, 30(12): 1511–1522. Xue W C, Huang C D, Huang Y. Design methods for the integrated guidance and control system[J]. Control Theory & Applications, 2013, 30(12): 1511–1522. |
| [6] | 周宏, 谭文. 线性自抗扰控制的抗饱和补偿措施[J]. 控制理论与应用, 2014, 31(11): 1457–1463. Zhou H, Tan W. Anti-windup schemes for linear active disturbance rejection control[J]. Control Theory & Applications, 2014, 31(11): 1457–1463. |
| [7] | 吴丹, 赵彤, 陈恳. 快速刀具伺服系统自抗扰的研究及实践[J]. 控制理论与应用, 2013, 30(12): 1534–1542. Wu D, Zhao T, Chen K. Research and industrial applications of active disturbance rejection control of fast tool servos[J]. Control Theory & Applications, 2013, 30(12): 1534–1542. |
| [8] | Yang X, Huang Y. Capabilities of extended state observer for estimating uncertainties[C]//American Control Conference. Piscataway, NJ, USA:IEEE, 2009:3700-3705. |
| [9] | Guo B Z, Zhao Z L. On the convergence of an extended state observer for nonlinear systems with uncertainty[J]. Systems & Control Letters, 2011, 60(6): 420–430. |
| [10] | 陈增强, 孙明玮, 杨瑞光. 线性自抗扰控制器的稳定性研究[J]. 自动化学报, 2013, 39(5): 574–580. Chen Z Q, Sun M W, Yang R G. On the stability of linear active disturbance rejection control[J]. Acta Automatica Sinica, 2013, 39(5): 574–580. |
| [11] | 梁青, 王传榜, 潘金文, 等. 线性自抗扰控制参数b0辨识及参数整定规律[J]. 控制与决策, 2015, 30(9): 1691–1695. Liang Q, Wang C B, Pan J W, et al. Parameter identification of b0 and parameter tuning law in linear active disturbance rejection control[J]. Control and Decision, 2015, 30(9): 1691–1695. |
| [12] | Katayama T. Subspace Methods for System Identification[J]. Communications & Control Engineering, 2005, 34(12): 1507–1519. |
| [13] | 李幼凤, 苏宏业, 褚健. 工业过程的子空间模型辨识[J]. 控制理论与应用, 2007, 24(5): 803–806. Li Y F, Su H Y, Chu J. Subspace model identification for industrial processes[J]. Control Theory & Applications, 2007, 24(5): 803–806. |
| [14] | 袁东, 马晓军, 曾庆含, 等. 二阶系统线性自抗扰控制器频带特性与参数配置研究[J]. 控制理论与应用, 2013, 30(12): 1630–1640. Yuan D, Ma X J, Zeng Q H, et al. Research on frequency-band characteristics and parameters configuration of linear active disturbance rejection control for second-order systems[J]. Control Theory & Applications, 2013, 30(12): 1630–1640. |
| [15] | 刘福才, 贾亚飞, 刘爽爽. 气动加载系统的积分型线性自抗扰控制[J]. 控制理论与应用, 2015, 32(8): 1090–1097. Liu F C, Jia Y F, Liu S S. Integral-linear active disturbance rejection controller for pneumatic force control system[J]. Control Theory & Applications, 2015, 32(8): 1090–1097. |
| [16] | 张皎, 杨旭, 刘源翔, 等. 高阶线性自抗扰控制器的性能评估[J]. 控制与决策, 2015, 30(7): 1162–1170. Zhang J, Yang X, Liu Y X, et al. Performance evaluation for active disturbance rejection with high-order line extended state observer[J]. Control and Decision, 2015, 30(7): 1162–1170. |
| [17] | 楼冠男, 谭文, 郑勤玲. 汽包锅炉单元机组协调系统的线性自抗扰控制[J]. 中国电机工程学报, 2011, 31(23): 94–100. Lou G N, Tan W, Zheng Q L. Linear active disturbance rejection control for the coordinated system of drum boiler-turbine units[J]. Proceedings of the CSEE, 2011, 31(23): 94–100. |
| [18] | 赵鹏, 姚敏立, 陆长捷, 等. 高稳快速非线性-线性跟踪微分器设计[J]. 西安交通大学学报, 2011, 45(8): 43–38. Zhao P, Yao M L, Lu C J, et al. Design of nonlinear-linear tracking differentiator with high stability and high speed[J]. Journal of Xi'an Jiaotong University, 2011, 45(8): 43–38. DOI:10.7652/xjtuxb201108008 |
| [19] | 刘川, 朱非甲, 马伟, 等. 直线电机的线性自抗扰控制[J]. 电机与控制学报, 2013, 17(1): 71–76. Liu C, Zhu F J, Ma W, et al. Research on linear active disturbance rejection control over linear motor[J]. Electric Machines and Control, 2013, 17(1): 71–76. |
| [20] | 陈晓平, 和卫星, 傅海军. 线性系统理论[M]. 北京: 机械工业出版社, 2010: 138-141. Chen X P, He W X, Fu H J. Linear System Theory[M]. Beijing: China Machine Press, 2010: 138-141. |