



2. 光电技术与智能控制教育部重点实验室, 甘肃 兰州 730070;
3. 武警陕西总队第一支队, 陕西 西安 712000;
4. 北京航空航天大学自动化科学与电气工程学院, 北京 100089
2. Key Laboratory of Opto-Technology and Intelligent Control Ministry Education, Lanzhou Jiaotong University, Lanzhou 730070, China;
3. The First Team, Shaanxi Brigade of Armed Police, Xi'an 712000, China;
4. School of Automation Science and Electrical Engineering, Beihang University, Beijing 100089, China
1 引言
作为常用驱动部件的三相六开关电压源逆变器 (voltage source inverter,VSI) 是电机系统中易出现故障的器件.如果VSI功率开关元件短路或断路,造成电机某相绕组开路.电机缺相运行会使输出转矩出现较大的波动,产生较大的机械噪音,系统的整体性能将大大降低,甚至不能工作.因此,必须考虑针对故障VSI电机驱动系统的容错控制问题.
经过多年研究和发展,目前主要形成3种逆变器容错方法[1-2]:(1) 利用双向晶闸管将电机绕组中性点连接到直流母线串联电容的中点,从而构成了两相四开关容错逆变器拓扑[3];(2) 通过添加第四桥臂的方式对逆变器进行容错控制[4];(3) 通过将电机绕组输入端连接到直流母线串联电容中点的方式,使得三相六开关逆变器切换为三相四开关容错逆变器[5-9].前两种VSI容错方法的共同特点是只能给电机的两相绕组提供工作电流,而为了得到与正常VSI电机系统相同电磁转矩,则需要将该两相绕组电流幅值增加为故障前电流的√3倍[10].第3种容错VSI方案可以使电机的三相绕组正常工作,如果能够控制好三相四开关容错VSI,则可保证电机三相绕组的电流平衡性.
永磁同步电机 (permanent magnet synchronous motor,PMSM) 具有转矩惯量比高、高功率因数等优点,因而在工业、交通、军事、航空等重要领域得到了广泛应用.近些年,在电机领域又出现了一种引起广泛重视的控制方式——有限控制集模型预测控制 (finite control set model predictive control,FCS-MPC)[11-25]. FCS-MPC利用了模型预测控制原理,具有较强的约束处理能力,其算法简单、执行容易.针对电机系统的FCS-MPC主要有两种方式:模型预测转矩控制 (model predictive torque control,MPTC)[12-15]和模型预测电流控制 (model predictive current control,MPCC)[16-24]. MPTC预测每个采样周期内VSI所有开关状态下电机电磁转矩和定子磁链,通过评价所定义的目标函数来选择电压控制矢量,实现对电机驱动系统的控制;MPCC预测每个采样周期内VSI所有开关组合状态下电机定子电流,通过评价所定义的目标函数来选择电压控制矢量,实现对电机驱动系统的.两种控制方式无需复杂的PWM调制器,都具有良好的动态和稳态性能[25].与MPTC比较,MPCC不存在调整权值的难题.
考虑到温度变化对定子电阻的影响,本文基于模型参考自适应 (model reference adaptive system,MRAS) 构造了定子电阻观测器,同时为了降低逆变器的平均开关频率,针对三相四开关容错VSI驱动的PMSM系统,提出了开关频率可优化的MPCC策略.
2 三相四开关容错逆变器PMSM拓扑及数学模型 2.1 三相四开关容错逆变器PMSM拓扑容错逆变器驱动的PMSM系统结构如图 1所示.直流母线间两串联电容的中点通过3个双向晶闸管TRn(n=a,b,c) 分别连接到绕组输入端.要实现逆变器的容错控制,根据对应的故障开关位置,断开熔断丝Fi(i=1,2,3),隔离故障桥臂,触发相应的双向晶闸管导通,故障桥臂将由串联电容取代.

|
| 图 1 三相六开关容错逆变器驱动PMSM系统拓扑 Figure 1 The topology of PMSM system driven by three-phase six-switch fault tolerant inverter |
不失一般性,本文以a相桥臂故障为例,此时三相四开关容错逆变器PMSM系统的等效结构如图 2所示.

|
| 图 2 三相四开关容错逆变器驱动PMSM系统拓扑 Figure 2 The topology of PMSM system driven by three-phase four-switch fault tolerant inverter |
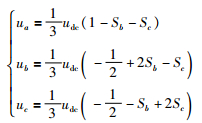
图 2所示的三相四开关逆变器驱动PMSM定子绕组各相电压为
|
(1) |
式中,Si(i=b,c) 为第i相桥臂对应的开关函数.桥臂上管导通下管关断时Si=1,桥臂上管关断下管导通时Si=0. (Sb,Sc) 具有 (0,0)、(0,1)、(1,0)、(1,1) 四种组合形式,从而产生4种开关状态,相应得到图 3所示的4个相位互差90°的电压空间矢量V1、V2、V3、V4,其中|V1|=|V4|=udc/2,|V2|=|V3|=√3udc/2.

|
| 图 3 三相四开关逆变器的电压矢量分布 Figure 3 The layout of voltage vector of three-phase four-switch inverter |
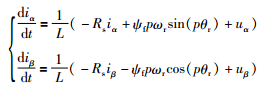
对面贴式PMSM,其定子电流方程和定子磁链方程在αβ两相静止坐标系下可表示为
|
(2) |
|
(3) |
式中,iα、iβ、uα、uβ、ψα、ψβ分别为定子电流、定子电压、定子磁链在α、β轴的分量,ψf为永磁体磁链,Rs为定子电阻,L为绕组电感,ωr为转子角转速,θr为转子位置角,p为极对数.
3 三相四开关逆变器PMSM的MPCC系统设计针对三相四开关逆变器PMSM驱动系统,基于模型参考自适应 (MRAS) 的定子电阻观测器,本文提出了开关频率可优化的MPCC策略,其系统框图如图 4所示. 图 4系统主要包括:MRAS定子电阻观测器、MPCC、三相四开关逆变器、PI控制器等.

|
| 图 4 三相四开关容错逆变器驱动PMSM的MPCC系统框图 Figure 4 The block diagram of MPCC-based PMSM system driven by three-phase six-switch fault tolerant inverter |
温度变化会改变电机定子绕组电阻,而定子电阻的不准确或变化对电机驱动系统控制精度会产生不利影响.因此本文将采用模型参考自适应技术对定子绕组电阻进行在线辨识,被辨识的定子电阻用于PMSM系统中的MPCC.
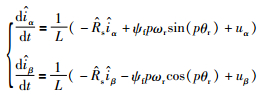
αβ两相静止坐标系下的定子电流观测器构造如下:
|
(4) |
式中,
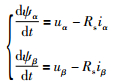
定义αβ两相静止坐标系下定子电流和定子绕组电阻估计误差:

|
(5) |
式 (4) 减式 (2) 得动态误差方程:
|
(6) |
针对系统 (6),设计李亚普诺夫函数:
|
(7) |
由式 (6) 和式 (7) 可得:

|
(8) |
根据李亚普诺夫稳定性定理第2法,为保证系统 (6) 全局渐近稳定,须使
|
(9) |
由于定子电阻实际值变化相对定子电流观测器 (4) 时间尺度而言是缓慢的,因此可得:
|
(10) |
进而可以得到定子电阻的自适应律:
|
(11) |
为了改善辨识精度和收敛速度,将定子电阻自适应律 (11) 修改为如下的PI结构:

|
(12) |
式中,kp1、ki1分别是比例和积分增益.
根据以上分析过程,可以构造出图 5所示MRAS定子电阻观测器结构图.

|
| 图 5 MRAS定子电阻观测器 Figure 5 MRAS observer of stator resistance |
如前所述,三相四开关逆变器提供4个非零电压矢量.在每个采样周期,以遍历法方式,通过评价每个电压矢量的控制效果,从中选择出使PMSM定子电流脉动最小的成本函数所对应的电压矢量.
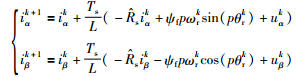
αβ轴定子电流分量在 (k+1)Ts时刻的预测值iαk+1、iβk+1可通过对式 (2) 离散得到:
|
(13) |
式中,iαk、iβk和uαk、uβk分别是kTs时刻αβ轴定子电流和电压分量;ωrk和θrk为kTs时刻转子角转速和转子位置角,
MPCC以减少PMSM定子电流脉动为原则来选择电压控制矢量. MPCC策略所采用的目标函数定义为

|
(14) |
式中,iα*、iβ*为αβ轴定子电流分量参考值.
通过式 (14) 选择最接近定子参考电流的电压矢量,并将其所对应的开关状态作用于逆变器.根据式 (14) 所建立的目标函数虽然可以保证系统的运行性能,但并未考虑减少逆变器功率管的平均开关频率问题.
与常规六开关逆变器相比,四开关逆变器产生的电压矢量个数减少,因此每个功率管在相同的时间内所承受的开关次数必然会增加,因此增加了开关损耗,这将会影响驱动系统的可靠性.为降低四开关逆变器功率管在每个采样周期内的开关次数,将式 (14) 目标函数改进为

|
(15) |
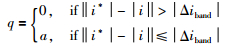
式 (15) 权重因子q的取值设计如下:
|
(16) |
式中,a为正实数,
式 (16) 表明,权重因子q通过电流偏差进行选取.若定子电流偏差在误差允许范围之外,此时的首要任务是将定子电流偏差快速收敛到电流偏差界限值之内,以免过大的电流偏差影响系统的转速和转矩响应;而当定子电流偏差在界限值之内时,则取q=a,在保证系统良好运行性能的同时减小开关频率.
4 仿真研究分析为了验证本文所提设计方法的有效性和正确性,采用Matlab/Simulink/Simscape进行了仿真研究.所用PMSM电机参数如表 1所示[26].
| 符号 | 物理量 | 标称值 |
| Rs | 定子电阻 | 2.875 Ω |
| L | 绕组电感 | 0.008 5 H |
| PN | 额定功率 | 1.1 kW |
| Bm | 摩擦系数 | 0 |
| J | 转动惯量 | 0.000 8 kg·m2 |
| TN | 额定转矩 | 3 N·m |
| udc | 直流电源 | 350 V |
| ωN | 额定转速 | 3 000 r/min |
| C | 直流母线电容 | 2 040 μF |
| ψf | 永磁磁链 | 0.175 Wb |
本文给出了3种仿真研究方案.第1种方案:针对三相四开关VSI驱动PMSM MPCC系统,验证MRAS定子电阻观测器辨识效果.第2种方案:基于同样MPCC参数和同样MRAS观测器参数,分别构建三相六开关VSI和三相四开关VSI驱动的两个PMSM系统,并进行比较分析,以说明本文三相四开关VSI控制方法的容错性.第3种方案:验证平均开关频率优化效果.
仿真中的采样周期为10 μs,给定转速ωr*为1 000 r/min,PMSM带载 (1 N·m) 启动. 3种仿真研究方案中的MPCC和MRAS观测器采用同样参数.
4.1 MRAS定子电阻观测器辨识效果针对三相四开关VSI驱动PMSM,采用MPCC策略,MRAS观测器中PI参数设置为

|
为了验证MRAS观测器的辨识效果,仿真时定子电阻初始值为2.875 Ω,0.1 s突增为4 Ω,0.3 s降至到4 Ω. 图 6给出了MRAS观测器对定子电阻辨识的仿真曲线.

|
| 图 6 定子电阻辨识曲线 Figure 6 The identification curve of the stator resistance |
从图 6看出,MRAS观测器能够适应实际定子电阻的突变,实现快速跟踪.本文所设计的MRAS观测器具有良好的辨识精度.
4.2 三相六开关VSI和三相四开关VSI驱动PMSM系统的比较采用同样参数MPCC和同样参数MRAS定子电阻观测器,分别针对三相六开关VSI和三相四开关VSI驱动的两个PMSM系统,带载启动 (1 N·m),给定转速ωr*为1 000 r/min,0.3 s时负载突加至2 N·m,q=0. 图 7和图 8是相应系统的动态响应 (包括转矩、转速和三相定子电流).

|
| 图 7 基于MPCC策略的三相六开关逆变器驱动PMSM系统动态响应 Figure 7 Dynamic response of MPCC-based PMSM system driven by three-phase six-switch inverter |

|
| 图 8 基于MPCC策略的三相四开关逆变器驱动PMSM系统动态响应 Figure 8 Dynamic response of MPCC-based PMSM system driven by three-phase four-switch inverter |
通过比较图 7和图 8可以看出:三相六开关逆变器驱动与三相四开关逆变器驱动的PMSM MPCC系统相比,后者转矩、转速和三相电流几乎与前者有相同的良好运行性能,从而验证了本文控制方法的容错性.
4.3 平均开关频率优化效果当式 (15) 中的权重因子q=0时,定子电流偏差Δi=||i*|-|i||的变化如图 9所示.由图 9可看出,当定子电流达到稳态时,定子电流偏差Δi的峰值约为0.6 A,因此在考虑一定裕度基础上,本文将Δiband取值为0.8 A.

|
| 图 9 q=0时的定子电流偏差 Figure 9 stator current error when q=0 |
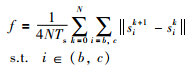
表 2给出了在式 (16) 中a不同时系统的转矩脉动及开关频率.由表 2可得,当a取值为0.3时,在明显降低开关频率的同时系统还可以保证较小的转矩脉动,因此本文选取a值为0.3. 表 2中的逆变器开关频率计算采用以下公式:
|
(17) |
式中,N为采样周期的个数.
| 系统性能参数 | α | ||||
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | |
| 转矩脉动/(N·m) | 0.13 | 0.14 | 0.15 | 0.16 | 0.20 |
| 开关频率/(kHz) | 29.65 | 24.80 | 20.00 | 15.06 | 10.64 |
综上所述,仿真研究表明:针对三相四开关逆变器,所设计的基于MRAS观测器MPCC策略能够使PMSM驱动系统稳定运行、具有良好动态性能,并且能够降低功率开关管的开关频率,对定子电阻变化具有较强的鲁棒性.
5 结论本文对三相四开关容错逆变器PMSM进行了数学建模分析,提出了基于三相四开关逆变器驱动的PMSM系统开关频率优化MPCC策略.考虑温度变化对定子电阻的影响,基于MRAS技术对MPCC算法中所需的定子电阻进行了在线辨识.仿真结果表明,基于四开关逆变器的MPCC策略可以使PMSM系统稳定运行,达到满意的转矩和转速控制效果,并且能够降低功率开关管的开关频率,对定子电阻变化具有强鲁棒性.
| [1] | Behrooz M. Survey of fault-tolerance techniques for three-phase voltage source inverters[J]. IEEE Transactions on Industrial Electronics, 2014, 61(10): 5192–5202. DOI:10.1109/TIE.2014.2301712 |
| [2] | 安群涛. 三相电机驱动系统中逆变器故障诊断与容错控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2011. An Q T. Diagnosis and fault tolerant control strategies of inverters in three-phase motor drive systems[D]. Harbin:Harbin Institute of Technology, 2011. |
| [3] | Gaeta A, Scelba G, Consoli A. Modeling and control of three-phase PMSMs under open-phase fault[J]. IEEE Transactions on Industry Applications, 2013, 49(1): 74–83. DOI:10.1109/TIA.2012.2228614 |
| [4] | Hoang K D, Zhu Z Q, Foster M. Direct torque control of permanent magnet brushless AC drive with single-phase open-circuit fault accounting for influence of inverter voltage drop[J]. IET Electric Power Applications, 2013, 7(5): 369–380. DOI:10.1049/iet-epa.2012.0290 |
| [5] | 安群涛, 孙醒涛, 赵克, 等. 容错三相四开关逆变器控制策略[J]. 中国电机工程学报, 2010, 30(3): 14–20. An Q T, Sun X T, Zhao K, et al. Control strategy for fault-tolerant three-phase four-switch inverters[J]. Proceedings of the CSEE, 2010, 30(3): 14–20. |
| [6] | Campos-Delgado D U, Espinoza-Trejo D R, Palacios E. Fault-tolerant control in variable speed drives:A survey[J]. IET Electric Power Applications, 2008, 2(2): 121–134. DOI:10.1049/iet-epa:20070203 |
| [7] | Mendes A M S, Cardoso A J M. Fault-tolerant operating strategies applied to three-phase induction-motor drives[J]. IEEE Transactions on Industrial Electronics, 2006, 53(6): 1807–1817. DOI:10.1109/TIE.2006.885137 |
| [8] | 张兰红, 胡育文, 黄文新. 容错型四开关三相变换器异步发电系统的直接转矩控制研究[J]. 中国电机工程学报, 2005, 25(18): 140–145. Zhang L H, Hu Y W, Huang W X. Research on direct torque control of tolerant type four-switch three-phase converter induction generation system[J]. Proceeding of the CSEE, 2005, 25(18): 140–145. DOI:10.3321/j.issn:0258-8013.2005.18.025 |
| [9] | 孙丹, 贺益康, 何宗元. 基于容错逆变器的永磁同步电机直接转矩控制[J]. 浙江大学学报, 2007, 41(7): 1101–1106. Sun D, He Y K, He Z Y. Fault tolerant inverter based direct torque control for permanent magnet synchronous motor[J]. Journal of Zhejiang University, 2007, 41(7): 1101–1106. |
| [10] | Liu T H, Fu J R, Lipo T A. A strategy for improving reliability of field-oriented controlled induction motor drives[J]. IEEE Transactions on Industry Applications, 1993, 29(5): 910–918. DOI:10.1109/28.245714 |
| [11] | Mayne D Q. Model predictive control:Recent developments and future promise[J]. Automatica, 2014, 50(12): 2967–2986. DOI:10.1016/j.automatica.2014.10.128 |
| [12] | Geyer T, Papafotiou G, Morari M. Model predictive direct torque control-Part Ⅰ:Concept, algorithm, and analysis[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6): 1894–1905. DOI:10.1109/TIE.2008.2007030 |
| [13] | Tobias G, Daniel E Q. Performance of multistep finite control set model predictive control for power electronics[J]. IEEE Transactions on Power Electronics, 2015, 30(3): 1633–1644. DOI:10.1109/TPEL.2014.2316173 |
| [14] | Teng Q F, Bai J Y, Zhu J G. Fault tolerant model predictive control of three-phase permanent magnet synchronous motors[J]. WSEAS Transaction on systems, 2013, 8(12): 385–397. |
| [15] | Teng Q F, Bai J Y, Zhu J G, et al. Sensorless model predictive torque control using sliding-mode model reference adaptive system observer for permanent magnet synchronous motor drive systems[J]. Control Theory & Application, 2015, 32(2): 150–161. |
| [16] | Preindl M, Schaltz E. Sensorless model predictive direct current control using novel second-order PLL observer for PMSM drive systems[J]. IEEE Transactions on Industrial Electronics, 2011, 58(9): 4087–4095. DOI:10.1109/TIE.2010.2100331 |
| [17] | 王从刚, 何凤有, 曹晓冬. 三相电压型PWM整流器有限开关序列模型预测电流控制[J]. 电工技术学报, 2013, 28(12): 182–190. DOI:10.3969/j.issn.1000-6753.2013.12.025 |
| [18] | 李国飞, 滕青芳, 高锋阳, 等. 容错三相四开关逆变器PMSM的模型预测转矩控制[J]. 信息与控制, 2015, 44(6): 697–702. Li G F, Teng Q F, Gao F Y, et al. Fault-tolerant three-phase four-switch inverter PMSM model predictive torque control[J]. Information and Control, 2015, 44(6): 697–702. |
| [19] | Aguilera R P, Quevedo D E. Predictive control of power converters:Designs with guaranteed performance[J]. IEEE Transaction on industrial informatics, 2015, 11(1): 53–63. DOI:10.1109/TII.2014.2363933 |
| [20] | 宋战锋, 夏长亮, 谷鑫. 静止坐标系下基于最优时间序列的电压型PWM整流器电流预测控制[J]. 电工技术学报, 2013, 28(3): 234–240. Song Z F, Xia C L, Gu X. Stationary frame current regulation of PWM rectifiers based on predictive control[J]. Transactions of China Electrotechnical Society, 2013, 28(3): 234–240. |
| [21] | 杨勇, 赵方平, 阮毅, 等. 三相并网逆变器模型电流预测控制技术[J]. 电工技术学报, 2011(6): 153–159. Yang Y, Zhao F P, Ruan Y, et al. Model current predictive control for three-phase grid-connected inverters[J]. Transactions of China Electrotechnical Society, 2011(6): 153–159. |
| [22] | Kwak S. Predictive control method with future zero-sequence voltage to reduce switching losses in three-phase voltage source inverters[J]. IEEE Transactions on Power Electronics, 2015, 30(3): 1558–1566. DOI:10.1109/TPEL.2014.2304719 |
| [23] | Xia C, Wang Y, Shi T. Implementation of finite-state model predictive control for commutation torque ripple minimization of permanent-magnet brushless DC motor[J]. IEEE Transactions on Industrial Electronics, 2013, 60(3): 896–905. DOI:10.1109/TIE.2012.2189536 |
| [24] | Rodríguez J, Pontt J, Silva C A, et al. Predictive current control of a voltage source inverter[J]. IEEE Transactions on Industrial Electronics, 2007, 54(1): 495–503. DOI:10.1109/TIE.2006.888802 |
| [25] | WangF X, LiS H, MeiX Z, et al. Model based predictive direct control strategies for electrical drives:An experimental evaluation of PTC and PCC methods[J]. IEEE Transactions on Industrial Informatics, 2015, 11(3): 671–681. DOI:10.1109/TII.2015.2423154 |
| [26] | 王庆龙, 张兴, 张崇巍. 永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J]. 中国电机工程学报, 2014, 34(6): 897–902. Wang Q L, Zhang X, Zhang CW. Double sliding-mode model reference adaptive system speed identification for vector control of permanent magnet synchronous motors[J]. Proceedings of CSEE, 2014, 34(6): 897–902. |