



2. 西安科技大学电气与控制工程学院, 陕西 西安 710054;
3. 中国科学院沈阳自动化研究所, 辽宁 沈阳 110016
2. College of Electrical and Control Engineering, Xi'an University of Science and Technology, Xi'an 710054, China;
3. Shenyang Institute of Automation, Chinese Academy of Sicences, Shenyang 110016, China
1 引言
近年来,非线性预测控制因其重要性而引起了众多研究者的兴趣,而基于Hammerstein模型的预测控制是一个典型代表[1-4].文[5-8]采用两步法控制策略求解了Hammerstein非线性系统的控制问题.两步法用解方程来分离可逆静态非线性,从而在预测控制律的计算中不再考虑该非线性;并用解饱和方法处理输入饱和约束,从而使得期望中间变量的计算完全成为线性无约束问题.该法可以处理非输入饱和型约束,但在实施时仍存在计算上的困难.
本文用双模控制方法综合基于Hammerstein模型的稳定预测控制算法,同文[5-8]一样,仍先将可逆静态非线性分离.但与两步法不同的是,本文方法将输入约束转化为中间变量约束,在优化求解期望中间变量时就考虑各种约束,包括中间变量约束、状态约束和输出约束等.不同于文[9],本文采用的是文[10]中标准的有限时域稳定预测控制器的设计方法,并考虑非线性方程的求解误差和输入非线性的不确定性,故更接近于工程实际.文[10]方法已在预测控制算法综合中广泛采用,而本文与文[10]的区别在于采用参数李亚普诺夫函数并引入参考集来优化稳定预测控制器中的参数.
符号说明:Rn为n维实空间.对向量x和正定矩阵W,‖x‖W2=xTWx. x(k+i|k) 为在k时刻对未来k+i时刻变量x的预测值.矩阵中*表示位于对称位置的分块.
2 有限时域非线性分离法预测控制考虑系统:
|
(1) |
其输入和状态约束为

|
(2) |

|
(3) |
其中,x∈Rn,y∈Rp,u∈Rm,分别为状态、输出与输入;




用多包描述表示输入静态不确定性,将系统 (1) 记为
|
(4) |
其中,v∈Rm为中间变量,f(0)=0.

|
(5) |
Hl为多包顶点,ωl(k+i) 为描述不确定性的参数,只需满足:

|
(6) |
在非线性分离法预测控制中,首先针对线性模型采用预测控制策略得到期望的中间变量,然后通过求解非线性代数方程得到实际控制作用.下面具体给出相应的算法,当求解期望中间变量时考虑非线性方程的求解误差.
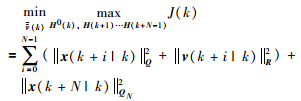
2.1 期望中间变量的计算类似于文[9],将对u的约束u∈U转化为对v的约束v∈V.由于非线性环节是对角解耦的,v∈V为线性约束.同文[12],定义v(k+i|k)=Fx(k+i|k)+(k+i|k),i=0,…,N-1,其中F的详细确定见第3小节.计算期望中间变量时不考虑f,而是求解如下的有限时域优化问题:
|
(7a) |

|
(7b) |

|
(7c) |
|
(7d) |

|
(7e) |
其中,Q、R、QN为对称正定的加权矩阵,Xf为终端约束集;QN和Xf的详细确定放在第3小节;H0(k) 为综合考虑H(k) 和非线性方程求解误差后的不确定性表示,但如何考虑方程求解误差将在下文说明;

考虑到状态预测量和模型不确定性,还需将问题 (7) 转化为可以直接求解的形式.记


|
(8) |

|
(9) |
其中,

|
(10) |
其中,
|
(11) |
其中,
|
(12a) |

|
(12b) |
考虑式 (11)、式 (12),优化问题 (7) 可重写为

|
(13) |
为进一步考虑式 (7e) 和式 (12),需要定义新的多包描述.首先,依赖式 (5)、式 (6) 和式 (7d),
|
(14) |
其中,



|
(15) |
其中,


根据式 (14),式 (12a) 可以转化为
|
(16a) |
类似地,根据式 (15),式 (12b) 可以转化为
|
(16b) |
另外当Xf是凸集时,根据式 (15),终端约束x(k+N|k)∈Xf可以转化为

|
(17) |
而式 (7e) 中的中间变量和状态约束可由下面的式子保证:

|
(18) |
|
(19a) |
|
(19b) |
其中,


这样,优化问题 (7) 最终转化为可直接求解的形式:
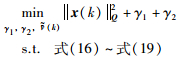
|
(20) |
式 (16)、式 (18) 和式 (19) 都可转化为LMI (linear matrix inequality);若Xf是多包集或椭圆集,约束 (17) 也可以转化为LMI,从而可将问题 (20) 转化为LMI求解[13].注意由式 (20) 得到的v(k) 可能因为方程求解不准确而得不到实现,故表示为vL(k)=κ(x(k)),此即为期望中间变量.
2.2 实际控制作用的求解根据vL(k)-f(u(k))=0,可由vL(k) 求解u(k),形式地记为

|
(21) |
特令求解过程满足:

|
(22a) |

|
(22b) |
其中,bi2≥1和bi1∈(0,1]为定义方程求解误差的标量.由于上文将对输入的约束转化为对中间变量的约束,所以满足式 (22) 的解总是存在的.由式 (4) 和式 (21) 得到

|
(23) |
则由中间变量表示的控制律为

|
(24) |
其中,κ(·) 为中间量.由于h(·) 主要体现了方程求解误差,故可将其看作一种不确定性,则h(·) 必包含于如下的多包:

|
(25) |
其中,对角阵Hlhh为多包的第lh个顶点,其第i个对角元为bi2或bi1,i=1,2,…,m.如,若m=2,则

|
现在,令:

|
(26) |
此即为式 (7e) 中的H0(k),故H0(k) 中考虑了方程求解误差.
注1 在文[11]中,要利用f-1并直接将u=f-1(v) 转化为多包描述,而本文则采用了解方程的方法来直接处理v=f(u).因此,本文方法不仅不需要f-1,而且针对求解误差的多包描述 (25) 要更容易处理得多.
注2 在文[11]中,将非线性转化成多包描述后,采用了N个确定性的自由中间变量v(k+i|k),0≤i≤N-1.假设用文[11]的方法处理本文的系统 (1)~(4),则由于处理的是多包描述模型,这些确定性的中间变量必须针对所有顶点.因此,N增大后,不一定能改进可行域 (使优化问题可解的初始状态所在的区域),甚至可能会减小可行域.在非线性分离法 (7) 中,采用了部分反馈型的中间变量v(k+i|k)=Fx(k+i|k)+(k+i|k).由于反馈作用的存在,使得该方法可以克服由于多包描述引起的不确定性的影响.根据文[14]的原理,采用式 (7) 后,增大N一般可改进可行域.
通过合理设计QN和Xf可使基于式 (20)~式 (22) 的预测控制系统闭环稳定,下一节对此详细讨论.
3 终端约束集和终端状态加权矩阵的确定由于要设计稳定的有限时域预测控制器,故应确定:① 终端约束集Xf;② 局部控制器F;③ 终端加权矩阵QN.文[10]指出①~③ 为标准的有限时域稳定预测控制器的3个要素 (当3个要素满足若干条件时闭环系统稳定),并给出了引理1中的4个基本条件的一般表达.本文则针对非线性分离法预测控制给出具体的稳定条件,并用它们讨论闭环稳定性,引理如下:
引理1 假设{Xf,F,QN}满足条件:
(C1) Fx(k+i|k)∈V,∀x(k+i|k)∈Xf,∀i≥N;
(C2) (A+BH(k+i)F)x(k+i|k)∈X,∀x(k+i|k)∈Xf,∀i≥N;
(C3) (A+BH(k+i)F)x(k+i|k)∈Xf,∀x(k+i|k)∈Xf,∀i≥N;
(C4) QN≥Q+FTRF+(A+BH(k+i)F)T·QN(A+BH(k+i)F),∀i≥N.
如果在k=0时刻式 (20) 有可行解,则基于式 (20)~式 (22) 的非线性分离法预测控制系统闭环指数稳定.
证明 该结论已经在文献中得到应用,如文[10-13],此处略. (证毕)
进一步讨论如何确定满足条件 (C1)~(C4) 的{Xf,F,QN}.
3.1 稳定条件的LMI转化为了以一种容易计算的形式满足 (C1)~(C4),假设:

|
(27) |
其中Ψ为适当维数的矩阵,



|
(28) |
其中1为元素为1的向量.现在,如果满足:

|
(29) |
则条件 (C1) 也满足.
下面结论可用于确定满足条件 (29) 和 (C2)~(C3) 的F和Xf.
定理1 假设存在矩阵{X,Y}和对称正定矩阵{Z,Γ,Ql=Pl-1,l=1,2,…,L}满足:
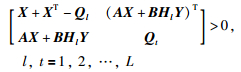
|
(30) |
|
(31) |
|
(32) |
其中

|
(33) |
可满足条件 (C1)~(C3).
证明 这种稳定性方法首先来源于文[15],被文[16]首先用于预测控制,而文[21]又进行了离线设计.此处略.证毕.
另外,条件 (C4) 满足的充要条件为

|
(34) |
定义Ξ=QN-1和Y=FX,则仿照文[17]可以将式 (34) 转化为LMI:
|
(35) |
综合定理1和式 (35),本文提出以下可用于综合计算的条件:
条件A 存在满足式 (30)~式 (32) 的矩阵Ql、Ξ、Y、X、Z、Γ.
易知若条件A满足,则存在适当的QN、Xf和F使条件 (C1)~(C4) 得到满足,故由引理1可得:
定理2 假设QN=Ξ-1和Xf=εΣ满足条件A.如果在k=0时刻式 (20) 有可行解,则基于式 (20)~式 (22) 的非线性分离法预测控制系统闭环指数稳定.
证明 参考文[12]可证,此处略.证毕.
3.2 终端约束集的优化和稳定要素的确定满足条件A后,取终端约束集为Xf=εΣ.选择XR为参考集,推广文[18]的方法,可以在某种程度上最大化Xf,通过附加以下条件做到:

|
(36) |
最大化α,则Xf相对于XR也是最大的.
假设XR为一个椭圆集,即XR={x∈Rn|xTRrx≤1},其中权重矩阵Rr>0,则式 (36) 等价于

|
(37) |
令
|
(38) |
假设XR为多包集,即XR=co{er1,er2,…,erp},其中eri∈Rn,i=1,2,…,p,则式 (36) 等价于:

|
(39) |
令
|
(40) |
求解式 (38) 或式 (40) 后,令Ξ=QN-1并用式 (33) 确定F和Xf即得到稳定的3要素.这样对应的优化问题 (20) 可用LMI工具求解. LMI优化问题常用内点法求解,其计算时间与k3L成正比,其中k为标量LMI变量的个数、L为LMI的总行数 (见文[19]).对本文方法,k=2+Nm,L=(n+1)2mLN+1+(n+2q+1)2mLN+(Nn-n+Nm+ 



考虑实际工程中经常遇到的双积分系统,即A= 
选择


为了验证分离法,选择b11=0.9和b12=1.1,则Lh=2、H1h=0.9、H2h=1.1.尽管可以准确求解方程,但是这里仅寻找可行解,以验证系统稳定性.选择N=4,初始状态x(0)=[-0.78,1.65]和H(k+i)=1+0.3sin (k+i). 图 1中实线为闭环系统的状态轨迹,系统稳定.

|
| 图 1 双积分系统的闭环状态轨迹 Figure 1 Closed-loop state trajectories of the double-integrated system |
为了与文[11]方法比较,参数选择同上,但是初始状态为x(0)=[-0.78ϑ,1.65],其中ϑ待定.对本文的非线性分离法,当ϑ≤1.97时都存在可行解;但对文[11]方法,当ϑ≤1.59时才存在可行解.而且,与文[11]相比,本文方法的在线计算量非常低 (本文不用在线确定3要素).进一步,对非线性分离法,如果准确求解方程 (b11=b12=1),则当ϑ≤2.02时都存在可行解.这进一步说明非线性分离法 (7) 对可行性是非常有利的.在图 1中,同时用虚线画出了ϑ=1时采用文[11]方法得到的状态轨迹,可见采用本文方法状态更快地收敛到原点.另外,采用基于非线性模型的一般方法,即将Hammerstein模型的静态非线性和动态线性环节合并成一个动态非线性模型并实施预测控制,结果见图 1中点划线所示.相比较而言,本文方法效果更好.
4.2 提升管反应器模型的控制文[20]研究催化裂化提升管反应器的非线性预测控制,采用了Hammerstein模型.线性部分对应的状态空间模型为


|
| 图 2 提升管反应器模型的闭环状态轨迹 Figure 2 Closed-loop state trajectories of the riser reactor model |
本文综合了基于Hammerstein模型的非线性分离法稳定预测控制器,由非线性方程求解误差造成的在闭环系统中的滞留非线性项被转化为多包描述,同时考虑了静态不确定性.同文[11]相比,由于没有将输入非线性本身 (或其逆) 转化为多包描述,故本文方法可行性一般要强一些.实际上,如果bi1=bi2=1、非线性方程求解准确且u∈U到v∈V的约束转换准确,则非线性分离法本身不会降低原始问题的可行性.
从计算量上讲,本文方法计算量小于文[11]方法而大于文[5-8]的两步法.本文方法统一地处理模型不确定性和方程求解误差,得到的控制器具有稳定性保证,并在优化中考虑各种实际约束,从而可得到更优的控制效果,这些是两步法所不具备的.
| [1] | Faulwasser T, Findeisen R. Nonlinear model predictive control for constrained output path following[J]. IEEE Transactions on Automatic Control, 2015, 61(4): 1026–1039. |
| [2] | Käpernick B, Graichen K. Nonlinear model predictive control based on constraint transformation[J]. Optimal Control Applications & Methods, 2015, http://dx.doi.org/10.1002/oca.2215. |
| [3] | Lucia S, Paulen R, Engell S. Multi-stage nonlinear model predictive control with verified robust constraint satisfaction[C]//53rd IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 2015:2816-2821. |
| [4] | Grancharova A, Johansen T A. Approaches to explicit nonlinear model predictive control with reduced partition complexity[C]//European Control Conference. Berlin, Germany:Springer, 2015:2414-2419. |
| [5] | Ding B C, Li S Y, Xi Y G. Stability analysis of generalized predictive control with input nonlinearity based-on Popov's theorem[J]. Acta Automatica Sinica, 2003, 29(4): 582–588. |
| [6] | Ding B C, Xi Y G, Li S Y. Stability analysis on predictive control of discrete-time systems with input nonlinearity[J]. Acta Automatica Sinica, 2003, 29(6): 827–834. |
| [7] | Ding B C, Xi Y G. A two-step predictive control design for input saturated Hammerstein systems[J]. International Journal of Robust and Nonlinear Control, 2006, 16: 353–367. DOI:10.1002/(ISSN)1099-1239 |
| [8] | Ding B C, Xi Y G, Li S Y. On the stability of output feedback predictive control for systems with input nonlinearity[J]. Asian Journal of Control, 2004, 6(3): 388–397. |
| [9] | Fruzzetti K P, Palazoglu A, Mcdonald K A. Nonlinear model predictive control using Hammerstein models[J]. Journal of Process Control, 1997, 7(1): 31–41. DOI:10.1016/S0959-1524(97)80001-B |
| [10] | Mayne D Q, Rawlings J B, Rao C V, et al. Constrained model predictive control:Stability and optimality[J]. Automatica, 2000, 36(5): 789–814. |
| [11] | Bloemen H H J, van de Boom T J J, et al. Model-based predictive control for Hammerstein-Wiener systems[J]. International Journal of Control, 2001, 74(5): 482–495. DOI:10.1080/00207170010014061 |
| [12] | Schuurmans J, Rossiter J A. Robust predictive control using tight sets of predicted states[J]. IEE Proceedings, Part D, 2000, 17: 13–18. |
| [13] | Ding B C, Xi Y G, Li S Y. A synthesis approach of on-line constrained robust model predictive control[J]. Automatica, 2004, 40(1): 163–167. DOI:10.1016/j.automatica.2003.07.007 |
| [14] | Kouvaritakis B, Rossiter J A, Schuurmans J. Efficient robust predictive control[J]. IEEE Transactions on Automatic Control, 2000, 45(8): 1545–1549. DOI:10.1109/9.871769 |
| [15] | Daafouz J, Bernussou J. Parameter dependent Lyapunov functions for discrete time systems with time varying parameter uncertainties[J]. Systems and Control Letters, 2001, 43: 355–359. DOI:10.1016/S0167-6911(01)00118-9 |
| [16] | Mao W J. Robust stabilization of uncertain time-varying discrete systems and comments on "an improved approach for constrained robust model predictive control"[J]. Automatica, 2003, 39(7): 1109–1112. |
| [17] | Kothare M V, Balakrishnan V, Morari M. Robust constrained model predictive control using linear matrix inequalities[J]. Automatica, 1996, 32(8): 1361–1379. |
| [18] | Hu T S, Lin Z L. On enlarging the basin of attraction for linear systems under saturated linear feedback[J]. Systems and Control Letters, 2000, 40(1): 59–69. DOI:10.1016/S0167-6911(00)00002-5 |
| [19] | Gahinet P, Nemirovski A, Laub A J, et al. LMI control toolbox for use with matlab, user's guide[M]. Natick, MA, USA: The Math Works Inc, 1995. |
| [20] | Tian X M, Fu D B. Nonlinear model predictive controller for the riser reactor of a FCC unit[C]//Proceedings of the World Congress on Intelligent and Automation. Piscataway, NJ, USA:IEEE, 2004:3344-3347. |
| [21] | 丁宝苍, 杨鹏, 孙鹤旭, 等. 离线鲁棒预测控制器综合方法的改进方案[J]. 控制与决策, 2005, 20(3): 312–315, 320. Ding B C, Sun P, Sun H X, et al. Improved off-line synthesis approach of robust model predictive control[J]. Control and Decision, 2005, 20(3): 312–315, 320. |