



2. 国网葫芦岛供电公司, 辽宁 葫芦岛 125105
2. State Grid Huludao Electric Power Supply Company, Huludao 125105, China
1 引言
永磁同步电机 (permanent magnet synchronous motor,PMSM) 以其运行效率高、扭矩大、结构可靠等优点,成为国内外学者研究的热点.近年来,国内工业自动化发展迅速,很多尖端领域 (如机器人、飞行器等) 对电机的控制性能要求越来越高,传统的PID控制方法已经很难满足控制的要求.随着研究成果的不断深化,各种先进的控制方法已被广泛的应用于永磁同步电机的控制中,如模糊控制方法[1]、滑模变结构控制方法[2]、无源控制方法[3]、模型预测控制方法[4]等.
模型预测控制 (model predictive control,MPC) 以其动态响应速度快、去耦合效果好、电流跟踪精确等特性,被广泛应用于现代工业过程控制中.这是一种基于被控系统模型的计算机控制算法,通过滚动优化和反馈校正的策略得到系统的最优控制量.近年来,国内研究学者对该方法进行了大量的研究.文[5]提出针对容错三相四开关逆变器的PMSM驱动系统模型预测转矩控制策略,通过模型预测转矩控制对三相四开关容错逆变器进行不平衡电压抑制,降低了电容不平衡分压对系统运行产生的不利影响.文[6]提出一种改进的永磁同步电机电流环预测控制方法,仅用一个电机参数,有效地降低了对模型参数准确性的依赖,避免出现稳态误差.文[7]针对模型预测电流控制器与PI调节器电流控制进行对比,更好地体现出模型预测在电流跟踪方面的优势.文[8]和文[9]提出用一个预测控制器取代电流环和速度环的级联结构,改善了系统的整体性能,但是计算量较大,增加了硬件的负担.
滑模变结构控制 (variable structure sliding control,VSSC) 其优点在于系统进入滑动模态时对系统参数非线性和外部干扰具有良好的鲁棒性.文[10]提出一种滑模观测器与模糊控制相结合的模糊滑模观测器速度位置估计方法,该方法一定程度上加快了响应速度和削弱了滑模抖振问题,提高了系统的鲁棒性.文[11]设计了离散滑模控制器,并应用于开关磁阻电机,降低了转矩的脉动,提高了系统的响应速度.文[12]将离散滑模控制应用于永磁同步电机调速系统中,提高了系统的跟踪能力和鲁棒性.
本文提出在永磁同步电机的矢量控制调速系统基础上,采用模型预测控制设计电流调节器,基于离散滑模变结构控制方法设计速度调节器取代PI调节器,改善了系统的启动性能,有效地提高了系统运行的稳定性.并设计离散滑模扰动观测器,对扰动进行实时观测,对速度控制器进行扰动补偿,有效抑制扰动对系统的影响.通过仿真结果的对比,更好地验证了本文方法的有效性.
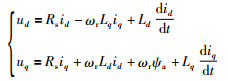
2 PMSM的数学模型以表面式永磁同步电机为被控对象,假设永磁体无阻尼作用且空间磁场为正弦分布,不计涡流与磁滞的损耗,在d-q同步旋转坐标系下的PMSM电压方程为
|
(1) |
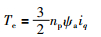
PMSM转矩方程为
|
(2) |
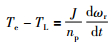
PMSM运动方程为
|
(3) |
式中,ud、uq、id、iq分别为电机的定子电压、电流在直、交轴上的分量,Ld、Lq为直轴电感、交轴电感,ωr为电角频率,Rs为定子电阻,Te、TL分别为电磁转矩、负载转矩,ψa为永磁体与定子交链磁链,J为转动惯量,np为极对数.
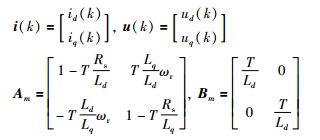
3 预测电流环的设计运用1阶欧拉法[6]将式 (1) 离散化,得到SPMSM的离散状态空间函数为

|
(4) |
式中,
|
|
其中,T为采样周期,yd、yq为k时刻d、q轴的输出变量.因为永磁同步电机的机械时间常数远大于其电气时间常数,所以在电流预测控制过程中,可认为系统的输出速度是恒定的.可得电流环增量式的预测模型为

|
(5) |

|
(6) |
其中,
在永磁同步电机的模型预测电流控制器的设计中,预测时域和控制时域的长度选取尤为重要.预测时域决定于参考给定的时域,而MP(预测时域)≥Mc(控制时域),Mc越小,控制的保守性越强.由式 (5)、式 (6) 的预测模型,可推导出预测时域内的预测方程[14]:

|
(7) |
其中,
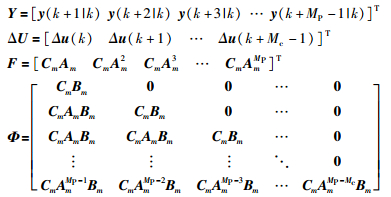
|
y(k+ik) 表示在k时刻对k+i时刻的预测输出值,i=1,…,MP;ΔU表示未来的控制变量.在预测时域内,为了实现最优控制,构造出目标函数:

|
(8) |
式中,Q为 (m×MP)×(m×MP) 维的被控变量权矩阵,m为输出量的个数,R为 (n×Mc)×(n×Mc) 维的控制变量权矩阵,n为状态变量的个数,所以Q和R可表示为Q=diag (α1,α2,…,αP×MP),α为被控变量权系数,R=[β1,β2,…,βC×MC],β为控制量权系数,RtT= [1,1,1,…,1]MPr(k),r(k) 为给定值.由式 (8),令

|
(9) |
应用滚动优化策略,将最优控制解的第1个元素Δu(k)=(Inu×Inu 0 … 0)1×MP×ΔU(k) 的两个变量Δud(k) 和Δuq(k) 迭代得出调速系统的ud(k) 和uq(k).
4 离散滑模速度控制器的设计滑模控制对外部扰动与内部参数变化具有一定鲁棒性,为了提高系统的鲁棒性,本文结合模型预测控制设计了离散滑模速度控制器.
取PMSM系统的状态变量为
|
(10) |
|
(11) |
将式 (11) 离散化得

|
(12) |
式中,
取滑模面为

|
(13) |
其中,c为滑模面参数且c>0.
由离散滑模存在和到达条件可知,当采样时间非常小时,需满足:
|
(14) |
为了提高系统正常运动段的动态品质,运用高为炳院士提出的指数趋近律设计离散滑模控制器,离散指数趋近律为

|
(15) |
其中,ε>0,q>0,1-qT>0.
将式 (12) 代入离散指数趋近律,整理可得

|
(16) |
为提高动态精度与系统的抗负载扰动能力,将离散扰动观测器实时辨识的负载转矩引入速度环的控制中,综合式 (2)、式 (3) 可得PMSM扩展状态方程为
|
(17) |
因为控制器的开关频率很高,在控制周期内可以认为负载转矩为恒定,
|
(18) |
以PMSM的转速和负载转矩作为观测对象,建立离散滑模扰动观测器为
|
(19) |
式中,


将式 (19) 减去式 (18) 可得滑模观测器的误差方程为
|
(20) |
式中,

定理 选择离散滑模扰动观测器为式 (19),设计滑模面
证明 当s1(k)>0,即e1(k)>0时:
|
(21) |
得
同理可得,当s1(k) < 0时:

|
当滑模观测器进入滑动模态时,满足s1(k+1)=s1(k)=0,可得:
|
(22) |
进一步得到负载转矩误差方程为

|
(23) |
选择李亚普诺夫函数为
|
(24) |
则:

|
(25) |
设s2(k)=e2(k),即e22(k+1)-e22(k) < 0,解得反馈增益

|
(26) |
式中,a为常数;转矩观测误差e2(k) 随时间的变化按指数的规律趋近于0,趋近速度取决于g的大小.得到转矩观测值为

|
(27) |
将转矩观测值引入滑模速度控制器,进行扰动补偿,得到电流给定值为

|
(28) |
当系统存在外部扰动时,扰动观测器将扰动量进行前馈补偿,减小滑模速度控制器的输出压力,无需较大ε、q值便可得到受扰动影响所需的给定电流.
6 仿真结果分析为了验证所设计的控制器的控制效果,在Matlab/Simulink环境下进行了仿真研究.通过PI+预测与本文的控制方法相对比,更好地体现本文的控制方法的优势.采用的永磁同步电动机原始运行参数和控制参数如表 1、表 2所示.
| 参数 | 数值 |
| d、q轴电感Ld=Lq | 1.2×10-3 H |
| 定子电阻Rs | 2.24 Ω |
| 永磁体磁链ψa | 0.175 Wb |
| 转动惯量J | 0.000 8 kg·m2 |
| 粘滞阻尼系数B | 0.001 N·m·s |
| 极对数np | 4 |
PMSM调速系统的整体结构如图 1所示.

|
| 图 1 PMSM调速系统整体结构图 Figure 1 Speed system′s schematic diagram of PMSM |
图 2为本文提出的控制方法与PI+预测控制下的系统启动转速对比仿真曲线,电机空载启动并加速至180 rad/s.从响应波形可以看出,采用PI+预测控制策略的转速存在超调,并且有明显的波动,而本文所采用的控制方法的响应曲线达到给定转速无超调且运行平稳. 图 3为电机空载启动时q轴电流波形对比曲线,通过对比可以看出,采用PI的控制方法,启动时波动明显,稳态时电流纹波较大.而本文方法启动平稳,能够迅速达到稳态且纹波较小.

|
| 图 2 空载启动速度对比曲线 Figure 2 Speed contrast curves of the no-load start |

|
| 图 3 空载启动电流波形对比曲线 Figure 3 Current contrast curves of the no-load start |
在给定转速为150 rad/s处启动,在0.03 s突然将转速提升至180 rad/s,并维持至0.06 s,在0.06 s处又将转速降至150 rad/s维持至0.1 s.从图 4的对比效果看,采用PI+预测控制方法的转速在阶跃给定时有明显超调,本文的控制方法对阶跃给定时的速度响应迅速,过渡平稳.

|
| 图 4 变转速响应对比曲线 Figure 4 Speed contrastcurve of speed varying |
电机在稳定运行过程中抗扰动性能的转速响应曲线如图 5所示,其中0~0.03 s为空载运行,0.03 s时刻突加负载2 N·m至0.06 s,0.06 s时将负载变为0 N·m,并维持至0.1 s.由仿真波形对比可以看出:采用PI+预测的方法中,当负载突变时振荡明显且稳定性差.而本文的控制方法对负载的突变响应迅速且平稳,具有较好的适应能力,更好地改善了系统的抗扰性能. 图 6为突加减负载时电流波形对比曲线,其更加充分体现本文方法的跟踪性能,电流动态性能较好.

|
| 图 5 突加减负载转速对比曲线 Figure 5 Speed contrast curve of load varying |

|
| 图 6 突加减负载电流波形对比曲线 Figure 6 Current contrast curves of load varying |
图 7为负载扰动滑模观测器的观测效果,从实际值与观测值对比看,观测器的跟踪效果准确且误差较小.

|
| 图 7 实际/观测转矩对比曲线 Figure 7 Curvers of actual/observed torque |
本文在永磁同步电机的矢量控制调速系统的基础上,采用模型预测控制设计电流调节器,速度环由离散滑模速度控制器取代PI调节器,改善了系统的启动性能,有效地提高系统运行的稳定性.设计了离散扰动滑模观测器并前馈补偿,有效地抑制负载转矩突变对转速的影响.最后,通过对比仿真结果,验证了本文所设计的控制方案具有较好的控制性能.
| [1] | 李宁, 李亚光, 王宏兴. 分数阶永磁同步电机混沌系统模糊跟踪控制[J]. 信息与控制, 2016, 45(1): 8–13. Li N, Li Y G, Wang H X. Fuzzy tracking control for fractional-order permanent magnet synchronous motor chaotic system[J]. Information and Control, 2016, 45(1): 8–13. |
| [2] | 张晓光, 赵克. 永磁同步电机滑模变结构调速系统动态品质控制[J]. 中国电机工程学报, 2011, 31(15): 47–52. Zhang X G, Zhao K. Sliding mode control of permanent magnet synchronous motor based on a novel exponential reaching law[J]. Proceedings of the CSEE, 2011, 31(15): 47–52. |
| [3] | 侯利民, 王巍. 无速度传感器的表面式永磁同步电机无源控制策略[J]. 控制与决策, 2013, 28(10): 1578–1586. Hou L M, Wang W. Speed sensorless system of passivity-based control strategy for SPMSM[J]. Control and Decision, 2013, 28(10): 1578–1586. |
| [4] | 牛里, 杨明, 刘可述. 永磁同步电机电流预测控制算法[J]. 中国电机工程学报, 2012, 32(6): 131–137. Niu L, Yang M, Liu K S. A predictivecurrent control scheme for permanent magnet synchronous motors[J]. Proceedings of the CSEE, 2012, 32(6): 131–137. |
| [5] | 李国飞, 滕青芳, 高锋阳. 容错三相四开关逆变器PMSM的模型预测转矩控制[J]. 信息与控制, 2015, 44(6): 697–702. Li G F, Teng Q F, Gao F Y. Model predictive torque control of fault-tolerant three-phase four-switch inverter permanent magnet synchronous motor[J]. Information and Control, 2015, 44(6): 697–702. |
| [6] | 王东文, 李崇坚, 吴尧. 永磁同步电机的模型预测电流控制器研究[J]. 电工技术学报, 2014, 29(s1): 75–79. Wang D W, LiC J, Wu Y. Model predictive current control scheme for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2014, 29(s1): 75–79. |
| [7] | 王伟华, 肖曦, 丁有爽. 永磁同步电机改进电流预测控制[J]. 电工技术学报, 2013, 28(3): 50–55. Wang W H, Xiao X, Ding Y S. An improved predictive current control method for permanentmagnet synchronousmotors[J]. Transactions of China Electrotechnical Society, 2013, 28(3): 50–55. |
| [8] | Bolognani S, Kennel R, Kuehl A, et al. Speed and current model predictive control of an IPM synchronous motor drive[C]//IEEE International Electric machines & Drives Conference (IEMDC). Piscataway, NJ, USA:IEEE, 2011:1597-1602. |
| [9] | Bolognani S, Bolognani S, Peretti L, et al. Design and implementation of model predictive control for electrical motor drives[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6): 1925–1936. DOI:10.1109/TIE.2008.2007547 |
| [10] | 陆华才, 提娟, 刘怡君. 基于模糊滑模观测器的PMLSM无传感器控制[J]. 信息与控制, 2016, 45(1): 60–65. Lu H C, Ti J, Liu Y J. Sensorless control for the PMLSM based on fuzzy sliding mode observer[J]. Information and Control, 2016, 45(1): 60–65. |
| [11] | 马世伟, 瞿遂春. 开关磁阻电机的离散滑模变结构控制[J]. 湖南工业大学学报, 2011, 25(4): 58–63. Ma S W, Qu S C. Discrete variable structure sliding control of switched reluctance motor[J]. Journal of Hunan University of Technology, 2011, 25(4): 58–63. |
| [12] | 杨朋松, 孙秀霞, 董文瀚. 永磁同步电动机调速系统的离散滑模控制[J]. 微特电机, 2012, 40(1): 5–8. Yang P S, Sun X X, Dong W H. Discrete sliding mode control for PMSM speed control system[J]. Small & Special Electrical Machines, 2012, 40(1): 5–8. |
| [13] | 何栋炜, 彭侠夫, 蒋学程. 永磁同步电机模型预测控制的电流控制策略[J]. 哈尔滨工程大学学报, 2013, 34(12): 1556–1565. He D W, Peng X F, Jiang X C. A current control strategy for the permanent magnet synchronous motor based on model predictive control[J]. Journal of Harbin Engineering University, 2013, 34(12): 1556–1565. |
| [14] | Wang L P. Model predictive control system designand implementation using MATLAB[M]. London, UK: Springer-Verlag, 2009. |
| [15] | 刘颖, 周波, 方斯琛. 基于新型扰动观测器的永磁同步电机滑模控制[J]. 中国电机工程学报, 2011, 30(9): 80–85. Liu Y, Zhou B, Fang S C. Sliding mode control of PMSM based on a novel disturbance observer[J]. Proceedings of the CSEE, 2011, 30(9): 80–85. |
| [16] | 张晓光, 孙力, 赵克. 基于负载转矩滑模观测的永磁同步电机滑模控制[J]. 中国电机工程学报, 2012, 32(3): 111–116. Zhang X G, Sun L, Zhao K. Sliding mode control of PMSM based on a novel load torque sliding mode observer[J]. Proceedings of the CSEE, 2012, 32(3): 111–116. |
| [17] | 鲁文其, 胡育文. 永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J]. 中国电机工程学报, 2010, 30(33): 78–83. Lu W Q, Hu Y W. Sensorless vector control using a novel sliding mode observer for PMSM speed control system[J]. Proceedings of the CSEE, 2010, 30(33): 78–83. |
| [18] | 陈天翔, 张辑, 彭彦卿. 基于转矩滑模观测器的抗负载扰动控制方法[J]. 电力系统保护与控制, 2013, 41(8): 114–118. Chen T X, ZhangJ, Peng Y Q. Anti-load disturbance control method based on torque sliding mode observer[J]. Power System Protection and Control, 2013, 41(8): 114–118. DOI:10.7667/j.issn.1674-3415.2013.08.018 |
| [19] | 赵影, 杨永君, 张武. 无刷直流电机离散滑模观测器直接转矩控制[J]. 电气传动, 2012, 42(5): 16–19. Zhao Y, Yang Y J, Zhang W. Discrete-time sliding mode observers on direct torque control for brushless DC motors[J]. Electric Drive, 2012, 42(5): 16–19. |
| [20] | 徐榕, 于泳, 于雁南. 基于离散状态观测器的H桥级联STATCOM无差拍控制[J]. 电力系统自动化, 2014, 38(21): 58–65. Zhao Y, Yang Y J, Zhang W. Dead-beat control of H-bridge cascaded STATCOM based on discrete state observer[J]. Automation of Electric Power Systems, 2014, 38(21): 58–65. DOI:10.7500/AEPS20130714013 |