



1 引言
四旋翼无人机作为一种垂直起降无人机,可以实现在空中悬停、在狭小的空间起降,这些特点使得四旋翼无人机在军事、民事和科学研究方面凸显很多潜在的应用空间.正因为四旋翼无人机广泛的应用领域,对四旋翼无人机飞行控制的要求也越来越高,各研究机构开始着手对四旋翼无人机控制算法的研究.该无人机系统具有强耦合、欠驱动、非线性等特性[1],在实际应用中还存在模型不确定、易受外界干扰、执行器饱和等问题,使得四旋翼无人机的控制更具挑战.
针对非线性控制系统有很多鲁棒控制方法,其中滑模控制吸引了研究人员的关注,这种控制方法在处理不确定性、时变特性、非线性和有界扰动系统具有较大的优势.文[2-5]分别采用不同的滑模控制算法实现四旋翼无人机稳定追踪期望轨迹点,但都忽略了不确定性的影响.文[6]考虑不确定性对控制系统的影响,在确定性上界已知的情况下,引入干扰观测器对不确定性进行观测和消除,实现精确追踪.针对存在外界扰动和参数不确定的系统,文[7]设计了自适应滑模控制器避免扰动和不确定性的影响,保证四旋翼的姿态稳定和轨迹跟踪.自适应控制的基本思想是估计模型中的不确定项,然后使用估计参数结合其它控制方法 (滑模、反步、鲁棒等) 设计控制器的输入量[8-12].但在仿真实验过程中,没有体现出外部干扰对位置跟踪控制的影响.
在实际工程中,饱和非线性在多数执行器中通常是不可避免的,当控制输入超出了执行器输出的上下限时,“饱和”就发生了[13],严重时可能导致整个系统失稳.文[14]针对四旋翼无人机姿态受限问题,使用双曲正切函数逼近饱和函数,解决饱和问题;文[15]针对航天器受到控制约束,把饱和项看作乘性扰动,采用自适应的方法设计控制器.
本文针对四旋翼无人机易受外界环境干扰、模型参数不确定、执行器饱和等问题,结合多环控制[16]结构形式,设计相应的滑模控制器,提高控制系统的收敛速度.
2 系统数学模型四旋翼无人机使用4个独立电机作为系统的动力系统,4个电机分别安装在十字机架的4个顶端位置,如图 1所示.将位于同一对角线上的两个电机分为一组,1、3号旋翼旋转方向为顺时针,其可以产生逆时针方向的扭矩;2、4号旋翼旋转方向为逆时针,其可以产生顺时针方向的扭矩,这样4个电机可以相互抵消相互之间的反扭矩,通过控制4个电机的转速来实现四旋翼无人机的不同姿态飞行[17].

|
| 图 1 四旋翼无人机模型 Figure 1 The model of the quadrotor unmanned aerial vehicle |
图 1中,ωi表示第i个旋翼的转速,Qi表示第i个旋翼旋转产生的反扭矩,Ti表示第i个旋翼旋转产生的推力 (i=[1, 2, 3, 4]).为了建立系统的数学模型,定义两个坐标系,即地理坐标系E(ex,ey,ez) 和机体坐标B(e1,e2,e3).
文[12]得到四旋翼无人机的数学模型:

|
(1) |

|
(2) |

|
(3) |

|
(4) |
其中,P=[x,y,z]T表示无人机质心在地理坐标系中的位置,V=[u,v,w]T表示无人机质心在地理坐标系中的线速度,g表示重力加速度,Cd表示阻力系数,T表示合升力,欧拉角Φ=[φ,θ,ψ]T分别表示机体的滚转角、俯仰角、偏航角,Ω=[p,q,r]T表示机体的角速度,R表示从地理坐标系到机体坐标系的旋转矩阵,m表示机体的质量,J=diag (Jx,Jy,Jz) 表示机体相对于轴心的转动惯量的对称矩阵,jr表示旋翼的转动惯量,τi表示每个电机产生的转矩,km表示反扭矩系数,ωi表示旋翼的转速,cv表示粘性摩擦力.
旋翼产生的推力为

|
(5) |
旋翼在空气中产生的反扭矩为

|
(6) |
旋翼转动产生的黏性摩擦力为

|
(7) |
其中,b>0,km>0,cv>0.
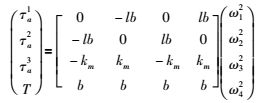
本文采用十字飞行模式,合升力T和机体扭矩τa=[τa1,τa2,τa3]T与旋翼转速之间的关系为
|
(8) |
式中,b表示旋翼产生的推力系数,km表示旋翼产生的反扭矩系数,l表示旋翼到机体中心的距离.
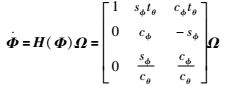
欧拉角Φ与角速度Ω之间的数学表达式为
|
(9) |
式中,sφ=sinφ,cφ=cosφ,cθ=cos θ,tθ=tanθ.
3 四旋翼无人机的多环控制根据四旋翼无人机数学模型的特点,控制系统采用多环结构形式,包括位置环、姿态环、转速环,如图 2所示.由于每个环之间存在耦合关系,从最外环依次向内设计控制器.其中位置环和姿态环属于2阶子系统且存在扰动和不确定项.快速终端滑模适用于2阶系统,保证有限时间内收敛,在此基础上考虑奇异值问题能够有效的消除抖振,同时设计适当的自适应律能够对加性扰动和模型不确定进行补偿.因此,本文针对位置环和姿态环采用基于自适应的非奇异快速终端滑模算法设计控制器.由于转速环是一个1阶系统,并且需要考虑执行器饱和问题.因此,将饱和项当作加性扰动,设计滑模干扰观测器对扰动项进行估计,最后设计基于干扰观测器的滑模控制器.

|
| 图 2 四旋翼控制系统框图 Figure 2 The control system of the quadrotor unmanned aerial vehicle |
为了实现四旋翼无人机的快速收敛性,选用快速终端滑模方法设计控制器.快速终端滑模方法具有有限时间内快速收敛到平衡点的特性,能够很好地满足四旋翼无人机对参考指令快速跟踪的性能要求,同时兼具滑模控制固有的鲁棒性强的特点.一般地,快速终端滑模面表示形式为

|
(10) |
式中,α>0,β>0,m、n为大于0的互质奇数且m<n,e表示跟踪误差.
在设计控制器的过程中,需要用到滑模面的导数,

|
(11) |
由式 (11) 可见,


|
(12) |
|
(13) |
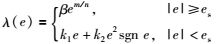
式中,e表示跟踪误差,在本文中分别表示位置的跟踪误差、姿态角的跟踪误差;α>0,β>0,决定跟踪误差收敛到滑模面的速度;es是正的常数值,表示当跟踪误差较小时进行滑模面切换;k1=(2-m/n)esm/n-1,k2=(m/n-1)esm/n-2,满足函数λ(e) 及其导数是连续的,保证滑模面的平滑切换.
3.2 针对位置环和姿态环设计控制器考虑模型不确定和外界干扰的影响,采用基于自适应的非奇异终端滑模算法设计控制器,不仅能对不确定项及扰动项进行补偿,而且能够保证四旋翼在有限时间内快速收敛到平衡点,实现定点跟踪,提高无人机控制的鲁棒性.
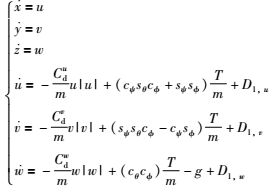
3.2.1 位置环由式 (1) 和式 (2) 得位置环的数学表达式为
|
(14) |
其中,Cdu、Cdv、Cdw分别表示u、v、w三个方向上的阻力系数.为了方便设计控制器,选取虚拟控制量:
|
(15) |
此时,式 (14) 可以简化为
|
(16) |
式中,X11、X12分别表示位置P和速度V;f1(·) 表示模型已知部分,以下简写为f1;d1=Δf1+D1表示模型不确定和外界扰动部分.
因此,没有内在动力与控制量相关,式 (16) 可以改写为其它线性参数化的形式:

|
(17) |
其中,u1,i、Pi、f1,i、d1,i(i=x,y,z) 分别为向量u1、P、f1、d1中的元素.
根据3.1节设计非奇异快速终端滑模面,其形式如下:

|
(18) |

|
(19) |
式中,α>1,i0,β1,i>0,n1>m1>0,k1=(2-m1/n1)·es1m1/n1-1,k2=(m1/n1-1)es1m1/n1-2,es1为正的常数值,跟踪误差e1,i=Pi-Pd,i.
对滑模面s1,i求导得

|
(20) |
根据李亚普诺夫稳定性定理设计控制器,定义李亚普诺夫函数形式:
|
(21) |
求导得
|
(22) |
若要使

|
(23) |
式中,
将式 (17) 与式 (23) 相减,并结合式 (18),可以得到系统的闭环动态方程:

|
(24) |
式中,d1,i为不确定项的估计误差.则有:
|
(25) |
由式 (24) 可以看出,当不确定项的估计误差
接着,利用李亚普诺夫稳定性定理设计不确定和扰动的自适应更新律[18],使参数估计值能够在线更新.故定义另一个李亚普诺夫函数,形式为

|
(26) |
式中,r1,i>0.则:

|
(27) |
将控制律u1,i代入式 (27) 得
|
(28) |
若要使

|
(29) |
此时,
位置环和姿态环之间存在耦合关系,根据位置环的虚拟控制量u1和期望的偏航角ψd解算出期望的合升力和期望的姿态角,在姿态环设计控制器,实现对期望姿态角的稳定跟踪控制:

|
(30) |
考虑四旋翼飞行器处于低速飞行或悬停状态下姿态角
变化较小,可作小角度假设
|
(31) |
简化为如下形式:
|
(32) |
式中,X21、X22分别表示姿态角Φ和角速度Ω;f2(·) 表示模型已知部分,以下简写为f2;g=diag (1/Jx,1/Jy,1/Jz) 表示已知的模型参数;控制输入量u2=[τa1,τa2,τa3];d2=Δf2+D2表示模型不确定和外界扰动部分.
姿态环和位置环的简化形式类似,因此设计与位置环相同的滑模面,形式如下:

|
(33) |

|
(34) |
其中,α2,i>0,β2,i>0,n2>m2>0,k1=(2-m2/n2)·es2m2/n2-1,k2=(m2/n2-1)es2m2/n2-2,es2是正的常数值,跟踪误差e2=[φ-φd,θ-θd,ψ-ψd]T.
采用和位置环相同的方法,根据李亚普诺夫稳定性定理设计控制律和自适应律.
控制律的形式为

|
(35) |
式中,
自适应律的形式为
|
(36) |
式中r2,i>0.
参考位置环的稳定性证明,定义李亚普诺夫函数:

|
(37) |
则:
|
(38) |
将控制律u2,i和自适应律

|
(39) |
因此,设计的控制律和自适应律能够保证系统的稳定性并能够在有限时间内收敛.
3.3 基于执行器饱和设计转速环控制器四旋翼无人机是通过控制4个旋翼的转速,实现不同姿态飞行.根据式 (8) 合升力T和机体扭矩τa=[τa1,τa2,τa3]T与旋翼转速之间的关系,解算出每个旋翼的期望转速,并设计控制器实现对4个旋翼转速的稳定控制.
4个旋翼的期望转速:
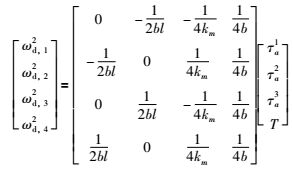
|
(40) |
针对转速环设计控制器时需要考虑执行器饱和问题,常用的处理方法有两种,将饱和项当作乘性故障或者加性扰动[19].本文将饱和项当作加性扰动,采用基于干扰观测器的滑模控制算法设计控制器.
考虑执行器饱和问题,转速环的数学表达式根据式 (4) 可以表示为

|
(41) |
定义饱和函数:
|
(42) |
定义饱和项为
|
(43) |
其中,τhi、τbi分别表示转速环执行器的上界和下界.
结合式 (42) 和式 (43) 可得饱和函数:

|
(44) |
由于转速环是一个1阶系统且4个电机的数学模型相同,因此设计相同的滑模面s=[s1,s2,s3,s4]T,形式为

|
(45) |
式中,

|
(46) |
为了方便分析,假设:

|
(47) |

|
(48) |
|
(49) |
因此:
|
(50) |
式中,ΔΓi是干扰项 (未知).为了实现稳定控制,需要设计干扰观测器对干扰项进行观测估算,具体步骤为:
定义:
|
(51) |
选取一个虚拟滑模函数形式:

|
(52) |
求导得

|
(53) |
因此,需要设计干扰观测器ci估计ΔΓi的大小,从而得到控制律.
假设不确定性和饱和项是有界的:

|
(54) |
定理1 定义ci:

|
(55) |
保证在有限时间内ci→ΔΓi.
证明 选取李亚普诺夫函数:

|
(56) |
求导得
|
(57) |
因为假设干扰项是有界的,所以σiΔΓi-|σi|Di<0,因此
此后,根据指数趋近律设计控制器[20],保证有限时间内收敛,设计控制器:

|
(58) |
式中,εi>0,ki>0;kisi保证当跟踪误差较大时系统以较大的速度收敛到滑动模态;εisgn si保证当跟踪误差接近于0时,系统的收敛速度是εi而不是0,可以保证有限时间内收敛.
为了证明此闭环系统是稳定的,定义李亚普诺夫函数:

|
(59) |
求导得

|
(60) |
因为ci能够在有限时间内收敛于ΔΓi,所以有限时间之后可以得到:

|
(61) |
所以该子系统是稳定的且能够在有限时间内收敛.
4 仿真与分析本文通过MATLAB/Simulink仿真验证所设计控制算法的可行性,仿真过程中使用的系统参数如表 1所示.
| 变量 | 数值 |
| 质量m/kg | 0.652 |
| 重力加速度g/(m/s2) | 9.8 |
| 机体x轴的转动惯量Jx/(kg/m2) | 1.321 5×10-4 |
| 机体y轴的转动惯量Jy/(kg/m2) | 1.252 2×10-4 |
| 机体z轴的转动惯量Jz/(kg/m2) | 2.3 527×10-4 |
| 旋翼的转动惯量jr/(kg/m2) | 2.3×10-3 |
| 推力系数b/(N/(rad/s)2) | 2.103×10-4 |
| 反扭矩系数km/((N·m)/(rad/s)2) | 2.091×10-6 |
| 粘性摩擦系数cv/(N/(rad/s)) | 0.6×10-4 |
| 旋翼到机体中心的距离l/m | 0.12 |
在实际工程中,电机的输入量是有界限的,实验室所使用的电机型号为飓风U2206 kV1900,在实验过程中测得其转速的最大值为250 r/s,最小值为50 r/s.
根据四旋翼无人机的系统参数,设计如下的仿真条件:假设四旋翼无人机的初始位置是[0, 0, 0]T(单位:m),初始姿态角是[0, 0, 0]T(单位:rad);期望位置是[0.5 m,0.8 m,1 m]T,期望偏航角0.1 rad.为了检验本文所提出的控制方法的控制效果,当仿真过程t=5 s时加入脉冲扰动,并选取适当的控制参数进行仿真实验.因篇幅有限,只列出位置环的控制参数:m1=3,n1=5,es1=0.01,μ1=0.6,α1,x=10,β1,x=1,γ1,x=3,ξ1,x=1,α1,y=10,β1,y=1,γ1,y=3,ξ1,y=1,α1,z=11,β1,z=1,γ1,z=5,ξ1,z=1,对控制效果比较敏感的参数有:α1,i、β1,i、γ1,i、ξ1,i(i=[x,y,z]),仿真效果如图 3~图 5所示.

|
| 图 3 位置环的响应曲线 Figure 3 The response curves of position |

|
| 图 4 姿态环的响应曲线 Figure 4 The response curves of attitude |

|
| 图 5 电机转速的响应曲线 Figure 5 The response curves of motors |
图 3~图 5分别是四旋翼无人机的位置、姿态、电机转速响应曲线,结果表明该控制系统可以在2 s内收敛到稳定状态,并且在5 s时刻加入脉冲扰动后,能够快速地恢复到平衡状态.仿真结果表明,本文所提出的控制方法具有较快的收敛速度,能够实现四旋翼无人机的定点悬停且在系统存在干扰的情况下,能够有效抑制扰动对控制精度带来的影响.
5 结论本文主要建立了四旋翼无人机的非线性数学模型,考虑模型不确定、外部干扰、执行器饱和问题,分别设计了基于自适应和干扰观测器的滑模控制器,并进行了仿真验证.该方法能够减小实际应用中模型不确定、外部干扰、执行器饱和对控制效果的影响,从而提高控制系统的鲁棒性,所设计的控制器具有一定的应用范围.
| [1] | 王璐, 李光春, 王兆龙, 等. 欠驱动四旋翼无人飞行器的滑模控制[J]. 哈尔滨工程大学学报, 2012, 33(10): 1248–1253. Lu W, Li G C, Wang Z L, et al. Sliding mode control of an underactuated quadrotor UAV[J]. Journal of Harbin Engineering University, 2012, 33(10): 1248–1253. |
| [2] | 李波波, 贾秋玲. 基于滑模控制的四旋翼飞行器控制器设计[J]. 电子设计工程, 2013, 21(16): 76–78. Li B B, Jia Q L. The controller design of quadrotor UAV based on sliding mode control[J]. Electronic Design Engineering, 2013, 21(16): 76–78. DOI:10.3969/j.issn.1674-6236.2013.16.023 |
| [3] | Zheng E, Xiong J. Quadrotor unmanned helicopter control via novel robust terminal sliding mode controller and under-actuated system sliding mode controller[J]. Optik-International Journal for Light and Electron Optics, 2014, 125(12): 2817–2825. DOI:10.1016/j.ijleo.2013.11.069 |
| [4] | Chen F, Hou R, Jiang B, et al. Study on fast terminal sliding mode control for a helicopter via quantum information technique and nonlinear fault observer[J]. International Journal of Innovative Computing Information & Control, 2013, 9(8): 3437–3447. |
| [5] | Wang L, Chai T, Zha L. Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics[J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3296–3304. DOI:10.1109/TIE.2008.2011350 |
| [6] | Chen F, Zhang K, Wang Z, et al. Trajectory tracking of a quadrotor with unknown parameters and its fault-tolerant control via sliding mode fault observer[J]. Proceedings of the Institution of Mechanical Engineers, Part Ⅰ:Journal of Systems and Control Engineering, 2015, 229(4): 279–292. DOI:10.1177/0959651814566040 |
| [7] | Bouadi H, Cunha S S, Drouin A, et al. Adaptive sliding mode control for quadrotor attitude stabilization and altitude tracking[C]//12th IEEE International Symposium on Computational Intelligence and Informatics. Piscataway, NJ, USA:IEEE, 2011:449-455. |
| [8] | Lee D, Kim H J, Sastry S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter[J]. International Journal of Control, Automation and systems, 2009, 7(3): 419–428. DOI:10.1007/s12555-009-0311-8 |
| [9] | Nekoukar V, Erfanian A. Adaptive fuzzy terminal sliding mode control for a class of MIMO uncertain nonlinear systems[J]. Fuzzy Sets and Systems, 2011, 179(1): 34–49. DOI:10.1016/j.fss.2011.05.009 |
| [10] | Huang M, Xian B, Diao C, et al. Adaptive tracking control of underactuated quadrotor unmanned aerial vehicles via backstepping[C]//2010 American Control Conference. Piscataway, NJ, USA:IEEE, 2010:2076-2081. |
| [11] | 甄红涛, 齐晓慧, 夏明旗, 等. 四旋翼无人机鲁棒自适应姿态控制[J]. 控制工程, 2013, 20(5): 915–919. Zhen H T, Qi X H, Xia M Q, et al. Quadrotor UAV robust adaptive attitude control[J]. Control Engineering of China, 2013, 20(5): 915–919. |
| [12] | Zhihong M, Yu X H. Terminal sliding mode control of MIMO linear systems[C]//Proceedings of the 35th IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 1996:4619-4624. |
| [13] | 刘金琨, 郭一. 带执行器饱和的N连杆机械臂输出反馈动态面控制[J]. 控制与决策, 2015, 30(5): 871–876. Liu J K, Guo Y. Output feedback dynamic surface control for N link manipulators with actuator saturation[J]. Control and Decision, 2015, 30(5): 871–876. |
| [14] | Zhu Z, Xia Y, Fu M. Adaptive sliding mode control for attitude stabilization with actuator saturation[J]. IEEE Transactions on Industrial Electronics, 2011, 58(10): 4898–4907. DOI:10.1109/TIE.2011.2107719 |
| [15] | 魏青铜, 陈谋, 吴庆宪. 输入饱和与姿态受限的四旋翼无人机反步姿态控制[J]. 控制理论与应用, 2015, 32(10): 1361–1369. Wei Q T, Chen M, Wu Q X. Backstepping-based attitude control for a quadrotor UAV with input saturation and attitude constraints[J]. Control Theory & Applications, 2015, 32(10): 1361–1369. |
| [16] | Besnard L, Shtessel Y B, Landrum B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer[J]. Journal of the Franklin Institute, 2012, 349(2): 658–684. DOI:10.1016/j.jfranklin.2011.06.031 |
| [17] | 聂博文, 马宏绪, 王剑, 等. 微小型四旋翼飞行器的研究现状与关键技术[J]. 电光与控制, 2007, 14(6): 113–117. Nie B W, Ma H X, Wang J, et al. Study on actualities and critical technologies of micro/mini quadrotor[J]. Electronics, Optics & Control, 2007, 14(6): 113–117. |
| [18] | 杨荟憭, 姜斌, 张柯. 四旋翼直升机姿态系统的直接自修复控制[J]. 控制理论与应用, 2014, 31(8): 1053–1060. Yang H L, Jiang B, Zhang K. Direct self-repairing control for four-rotor helicopter attitude systems[J]. Control Theory & Applications, 2014, 31(8): 1053–1060. |
| [19] | Lu K, Xia Y, Fu M. Controller design for rigid spacecraft attitude tracking with actuator saturation[J]. Information Sciences, 2013, 220: 343–366. DOI:10.1016/j.ins.2012.07.039 |
| [20] | 刘金琨. 滑模变结构控制MATLAB仿真[M]. 第2版. 北京: 清华大学出版社, 2014. Liu J K. Sliding mode control design and MATLAB simulation[M]. 2nd ed. Beijing: Tsinghua university press, 2014. |