



2. 北京宇航系统工程研究所, 北京 100076;
3. 中国航天科技集团公司, 北京 100037
2. Beijing Institute of Aerospace Systems Engineering, Beijing 100076, China;
3. China Aerospace Science and Technology Corporation, Beijing 100037, China
1 引言
两时间尺度问题是多尺度问题[1-2]中的一类普遍问题,包含两时间尺度特性的系统,可利用2个低阶子系统近似原本复杂的高阶系统[3],由此原本不能解、不易解的问题能够得到一定的简化.在飞行器控制系统设计中,也希望利用对象自身的两时间尺度特性,从建模[4-5]、轨迹规划[6-7]、制导律设计[8-11]、驾驶仪设计[12-13]等方面简化计算.
对于特定问题,有时仅利用慢子系统的解控制原系统即能达到满意的结果,即降阶控制[14-15].由于系统建模的局限或是简化计算的需求,工程设计中的诸多控制[16-18]都可看作是降阶控制,并取得了良好的效果.但文献并未对降阶控制器的恰当维度及其影响因素进行深入分析.由于降阶控制的前提是准确把握系统的时间尺度特性,而该特性对系统参数变化敏感,这就意味着若系统参数包含不确定性或发生摄动,系统的时间尺度特性也随之变化,进而导致原本设计的降阶控制器可能失效.
对飞行器来说,外部环境 (气温、气压、气流) 和自身的特征参数 (几何尺寸、重量、外形等的微小偏差) 的变化[19]均能影响其模型的准确性,因而研究在系统参数包含不确定的条件下仍然可用的降阶控制器设计方法就很有必要.
本文在给定的6阶模型[14]系统参数中加入了随机误差,观测了参数变化对系统时间尺度特性的影响,分析了相应的降阶控制器维度及设计所需的状态变量,提出了一种包含全部潜在慢变状态、在系统参数不确定的情况下仍然有效的拓展降阶控制器.
2 两时间尺度系统及降阶控制对于线性定常系统:
|
(1) |
x为系统状态量,y为系统输出量,A、B、C为系统系数矩阵.若通过反馈控制使得闭环系统具有两时间尺度特性,则可通过一系列变换将式 (1) 转化为
|
(2) |
其中,μ为小于1的小量,x1、x2的维度分别为n1×1和n2×1.将式 (2) 分解为2个快慢子系统近似.慢子系统为
|
(3) |
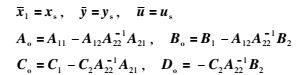
其中,
|
(4) |
其中,x1、y、u分别为x1、y、u中的慢模态.快子系统为
|
(5) |
令系统性能指标为

|
(6) |
对于快慢子系统的反馈控制us=Goxs,uf=G2xf,若能满足Ao+BoGo稳定、A22+B2G2稳定,则可设计降阶控制器:

|
(7) |
对于式 (7) 得到的降阶控制,不能依据传统的LQR (linear quadratic regulator) 方法[20]得到其性能指标.文[15]指出,若能通过解Riccati方程:

|
(8) |
得到正定解Pr,则可将利用降阶控制ur控制原系统 (1) 的性能指标转化为
由第2节知,降阶控制器设计的关键就是明确原系统可以分解出怎样的慢子系统,从而确定慢子系统的维度n1及慢变状态xs.对于线性系统而言,也就是需要明确如何对式 (1) 中的系数矩阵分块为式 (2) 的形式.
根据奇异摄动理论[3]可知,n维系统包含n1维慢模态、n2维快模态 (n=n1+n2),设计n1维降阶控制器是合理的;若降阶控制器的维度低于n1,则意味着控制器设计过程中忽略了部分慢变状态,其控制效果存在较大的不确定性.
针对文[14]中6阶系统设计的2阶、4阶降阶控制器控制性能如图 1所示.图 1中,J6、J4、J2分别表示对于6阶系统设计6阶、4阶、2阶控制器的控制性能指标对10的对数.δCMX为文[14]中系统控制性能指标中的参数,随着权系数δCMX的增加,6阶系统中包含的慢模态维数从初始的2变为4,而设计的2阶控制器由于未包含增加的2维状态逐渐失效,其控制性能指标最终发散.

|
| 图 1 2阶控制器的失效 Figure 1 The failure of the second-order controller |
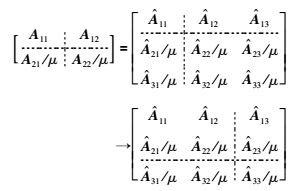
另一方面,若设计的降阶控制器维度高于n1,即对原系统分解时将部分快模态划分入慢子系统中,以系数矩阵A为例,用“^”表示重新分块后的矩阵,以虚线表示对系数矩阵的分块方法,式 (9) 中第1种分块对应着降阶控制器维度为A11的维度为n1,等价于第2种分块结构,而在第3种分块方式中,慢子系统中混入了部分快模态,此时的慢子系统维度增加.
|
(9) |
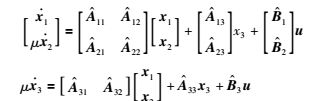
参照第2节的推导,此时系统为
|
(10) |
其中,x1的定义与式 (2) 中相同,x2的维度为n22×1,x3的维度为n23×1且n2=n22+n23.在这种情况下,以x1、x2为慢变状态设计n1+n22维的降阶控制器.以“~”区分对原系统重新分解后与第2节中对应的矩阵,若能保证


|
(11) |
参见文[15]可知,与原系统的降阶控制 (7) 相比,


|
(12) |

|
(13) |
均成立.由此可知,
|
(14) |
进而可推知ur的控制性能指标仍旧与最优控制相差0(μ) 量级.
由此可知,全部包含慢模态、部分包含快模态的拓展降阶控制器仍能满足性能指标要求,同时由于控制器自身维度的增加,其性能应不低于原本的降阶控制器.
4 参数不确定对时间尺度特性的影响以文[14]中6阶滚转驾驶仪模型为例,分析系统参数不确定对时间尺度特性的影响及其对控制器设计的要求.系统模型为
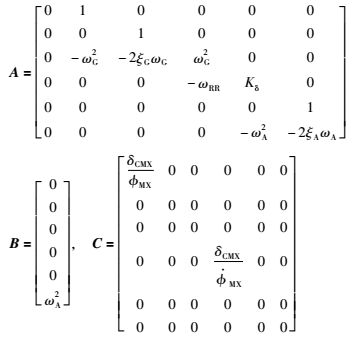
|
(15) |
状态变量依此记为x1、x2、x3、x4、x5、x6,φMX=10°,
| 符号 | 含义 | 数值 |
| ωRR | 滚转角速度带宽 | 2 rad/s |
| Kδ | 肋片效率 | 9 000 1/s2 |
| ωA | 伺服带宽 | 100 rad/s |
| ζA | 伺服阻尼 | 0.65 |
| ωG | 速率陀螺带宽 | 200 rad/s |
| ζG | 速率陀螺阻尼 | 0.5 |
首先需要分析该系统的时间尺度特性,取μ=0.5,利用闭环时间特性分块方法分析.当参数未加扰动时,系统慢模态为2维,慢变状态为x1、x4,由第2节知,可通过反馈x1、x4设计2阶降阶控制器,使系统控制性能达到要求.由于系统模型参数存在摄动或不确定,文中为了简化分析对系统参数,均施加10%幅度的随机扰动,仿真500次,闭环系统时间尺度特性如图 2所示.

|
| 图 2 系统慢状态及其出现概率 Figure 2 The slow states and their corresponding occurrence probabilities |
由图 2可见,系统参数加入10%扰动后,500次仿真实验中有18次慢模态维数为4,慢变状态为x1、x4、x5、x6,由第3节的分析知,此时设计的2阶降阶控制器可能失效,应该以状态变量x1、x4、x5、x6设计4阶反馈控制器.
施加扰动后发现,状态量x5、x6为系统中潜在的慢变状态,有一定的几率转变为真实的慢变状态.未包含潜在慢变状态的降阶控制器在系统参数不确定的情况下可能失效;而包含了潜在慢变状态的降阶控制器由于其维度及状态量的增加称为拓展降阶控制器,依据第3节的分析,在系统参数不确定的情况下依然能够保证其控制性能.
5 拓展降阶控制器设计及性能分析经第4节分析知,状态量x1、x4为慢变状态,状态量x5、x6为潜在慢变状态.由于μ确定了系统的时间尺度特性,为了能够在系统慢模态为2维的情况下设计4维的降阶控制器,此时可动态调整小参数μ使得系统始终判定慢子系统维度为4,进而设计出拓展的降阶控制器.该控制器的优点在于,当系统慢模态维度为4时,控制器完全包含系统慢模态,满足控制性能要求;当系统慢模态维度为2时,该控制器包含系统全部慢模态及部分快模态,同样能够满足控制性能要求且性能指标优于2阶控制器.其缺点在于,增加了一部分计算复杂性换取了系统鲁棒性.拓展降阶控制器控制性能如图 3所示.

|
| 图 3 降阶控制器性能 Figure 3 The performance of the reduced controller |
图 3中纵坐标为拓展降阶控制性能Jr与全阶最优控制器性能J的差值占全阶最优性能的比重.由图 3可见,500次实验偏差始终为10-3量级,符合第3节指出的偏差不高于0(μ) 量级的结论,说明设计的4阶控制器在系统参数存在扰动的情况下能够很好地保证性能要求.
6 结论在已知系统模型的情况下,降阶控制器设计的目的更多是为了简化计算,因而其阶数应越低越好.然而,由于有时系统参数存在不确定性,当这种不确定性对系统的时间尺度特性影响较大时,就不得不考虑设计的降阶控制器可能已不符合当前系统的时间特性,从而控制失效.因此,在设计降阶控制器前对系统的时间特性分析很有必要.本文提出的拓展的降阶控制器将有较大可能成为慢变模态的状态变量包含到降阶控制器设计当中,虽然增加了部分计算复杂性但能在系统参数扰动的情况下仍能保证其控制性能不低于传统的降阶控制器控制性能,即与最优性能相差0(μ) 量级,因而具有工程实践意义.
| [1] | Weinan E. Principles of multiscale modeling[M]. Beijing: Science Press, 2012: 1-18. |
| [2] | Ramnath R V. Multiple scales theory and aerospace applications[M]. Virginia, USA: American Institute of Aeronautics and Astronautics, 2010: 61-76. |
| [3] | 周明儒, 林武忠, 倪明康, 等. 奇异摄动导论[M]. 第1版. 北京: 科学出版社, 2014: 164-180. Zhou M R, Lin W Z, Ni M K, et al. Singular perturbation theory introduction[M]. 1st ed. Beijing: Science Press, 2014: 164-180. |
| [4] | 尤明, 宗群, 曾凡琳, 等. 基于平衡截断方法的高超声速飞行器模型降阶[J]. 控制理论与应用, 2014, 31(6): 795–800. You M, Zong Q, Zeng F L, et al. Model order reduction for hypersonic vehicle based on balanced truncate method[J]. Control Theory & Applications, 2014, 31(6): 795–800. |
| [5] | 倪迎鸽, 万小朋, 赵美英. 模型降阶在折叠机翼主动控制中的应用研究[J]. 航空工程进展, 2015, 6(3): 326–332. Ni Y, Wan X P, Zhao M Y. Application of model reduction in active control of a folding wing[J]. Advances in Aeronautical Science and Engineering, 2015, 6(3): 326–332. |
| [6] | 洪陆合, 林献武, 兰维瑶. 基于奇异摄动发的平流层飞艇水平面轨迹优化[J]. 系统工程与电子技术, 2014, 36(4): 728–733. Hong L H, Lin X W, Lan W Y. Trajectory optimization of stratosphere airship in horizontal based on singular perturbation method[J]. Systems Engineering and Electronics, 2014, 36(4): 728–733. |
| [7] | Ardema M D, Rajan N. Separation of time scales in aircraft trajectory optimization[C]//AIAA Atmospheric Flight Mechanics Conference. Gatlinburg, Tennessee, USA:AIAA, 1983:1-7. |
| [8] | 胡锡精, 严卫钢, 黄雪梅. 基于奇异摄动的最优滑翔制导律[J]. 系统仿真学报, 2013, 25(2): 307–312. Hu X J, Yan W G, Huang X M. Optimal glide guidance based on singular perturbation[J]. Journal of System Simulation, 2013, 25(2): 307–312. |
| [9] | 乔清青, 陈万春. 基于动态逆的空空导弹奇异摄动中制导律[J]. 北京航空航天大学学报, 2011, 37(11): 1365–1371. Qiao Q Q, Chen W C. Singular perturbation midcourse guidance law based on dynamic inversion for air-to-air missile[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(11): 1365–1371. |
| [10] | 乔清青, 陈万春. 高超声速导弹近最优中制导律[J]. 飞行力学, 2014, 32(1): 48–52. Qiao Q Q, Chen W C. Near-optimal midcourse guidance law for hypersonic missile[J]. Flight Dynamics, 2014, 32(1): 48–52. |
| [11] | Schetz J A, Asher B. Optimal control theory with aerospace applications[M]. 1st ed. Virginia: American Institute of Aeronautics and Astronautics, 2010: 179-199. |
| [12] | 宋崎, 江紫亚, 韩建达, 等. 基于两时间尺度模型的直升机非线性控制器设计[J]. 控制与决策, 2014, 29(9): 1673–1677. Son Q, Jiang Z Y, Han J D. Design of two time-scale model based nonlinear controller for a helicopter[J]. Control and Decision, 2014, 29(9): 1673–1677. |
| [13] | 宋崎, 江紫亚, 韩建达, 等. 直升机执行器故障的双时标容错控制系统设计[J]. 控制理论与应用, 2014, 31(9): 709–716. Son Q, Jiang Z Y, Han J D, et al. Two time-scale fault tolerant control system design against actuator faults for a helicopter[J]. Control Theory & Applications, 2014, 31(9): 709–716. |
| [14] | Nesline F W, Zarchan P. Why modern controllers can go unstable in practice[J]. Journal of Guidance Control & Dynamics, 1984, 7(4): 495–500. |
| [15] | Kokotovic P, Haddad A. Controllability and time-optimal control of systems with slow and fast modes[J]. IEEE Transactions on Automatic Control, 1975, 20(1): 111–113. DOI:10.1109/TAC.1975.1100852 |
| [16] | 李正英, 熊辉. 大跨度拱桥基于降阶模型的半主动鲁棒控制[J]. 振动与冲击, 2010, 29(1): 117–182. Li Z Y, Xiong H. H∞ Robust semi-active control for a long-span arch bridge based on a reduced order model[J]. Journal of Vibration and Shock, 2010, 29(1): 117–182. |
| [17] | 刘潇翔, 胡军. 包含高相关度密集模态的结构低阶振动控制[J]. 中国科学:技术科学, 2011, 41(9): 1180–1189. Liu X J, Hu J. Low order vibration control for structures with highly correlated close modes[J]. Science China:Technological Sciences, 2011, 41(9): 1180–1189. |
| [18] | 李华, 曹新军. 复杂电力系统的鲁棒降阶方法研究[J]. 兰州交通大学学报, 2009, 28(3): 36–40. Li H, Cao X J. Research on robust reduction method for complex power system[J]. Journal of Lanzhou Jiaotong University, 2009, 28(3): 36–40. |
| [19] | 程国采. 弹道导弹制导方法与最优控制[M]. 1版. 长沙: 国防科技大学出版社, 1987: 1. Cheng G C. Ballistic missile guidance method and optimal control[M]. 1st ed. Changsha: National University of Defense Technology Press, 1987: 1. |
| [20] | 胡寿松. 自动控制原理[M]. 5版. 北京: 科学出版社, 2007: 584-600. Hu S S. The principle of automatic control[M]. 5th ed. Beijing: Science Press, 2007: 584-600. |