



1 引言
风能是目前增长速度最快的可再生能源,而风力发电是利用风能的有效手段之一[1-2].根据风力机的运行信息可以判断其是否运行在正常状态,有利于及时地发现和排除故障,避免不必要的停机,实现效益最大化[3-4].
桨距执行器作为风力机系统中的关键部件,主要负责调整叶片桨距角.通过对桨距角的调整使风速在大于额定值小于切出值时,实现恒功率输出.桨距执行器故障包括:泵磨损、液压泄漏、液压油空气含量过高、阀堵塞和泵堵塞等[5].当桨距执行器出现故障时,桨距角得不到及时的调整或无法调整,从而导致桨距系统的动态滞后甚至造成系统失控发生严重灾难[6-7].因此,及时的诊断和处理桨距执行器故障是必要的.文[8]利用自适应参数估计算法,诊断出了风力机液压桨距系统中的液压泄漏故障,但考虑到风力机实际运行中存在内外部液油水平耦合程度不同的情况,还需通过多故障类型的实验来验证算法的效性.而针对桨距执行器泵磨损和泵堵塞故障,文[9]采用集成神经网络算法,通过检测泵压力和壳体震动进行故障信号的提取和分析,实现了在线诊断.文[10]根据自适应神经模糊推理算法,拟合风速、桨距角、功率输出和运行状态之间的关系,诊断变桨距故障,为风场工作人员制定合理的维修保养计划提供参考依据.然而,桨距系统具有强非线性,单一的线性化模型无法真实地体现运行状况,也就无法准确实现故障诊断.而风力机的线性变参数(linear parameter varying,LPV)模型[11],选取风速作为调度变量,通过在线调度不同运行点处的线性化模型,使模型更加准确,且其可以利用线性工具求解非线性问题[12].因此,在LPV模型的基础上对风力机进行故障诊断得到重视.文[13]将桨距系统中的自然频率和阻尼系数看作变参数,建立桨距系统的LPV模型,利用子空间辨识预测器产生故障残差,诊断液压压力故障,但文中缺少故障警报信号以及未考虑风扰动信号下故障检测方法的鲁棒性.文[14]采用H_和H∞优化方法,设计基于LPV模型的鲁棒故障观测器检测执行器故障,仅仅通过数值例子验证了算法的有效性,缺少对实际故障情况下的有效性分析.文[15]将桨距执行器故障转化为0、1信号设计自适应观测器,进一步,文[16]采用扩展状态观测器估计桨距执行器和传感器故障为容错控制提供调节信号,但两者都是通过估计0,1信号实现对故障的估计,与故障诊断相比,准确度和精度还需进一步加强.
本文根据桨距执行器的故障特性,结合自适应观测器和LPV技术,提出了自适应LPV故障观测器.将桨距执行器故障统一转化为加性故障,考虑故障矩阵和风扰动,将自适应故障观测器扩展到LPV系统,得到自适应LPV故障观测器的限制条件.利用LMIs工具求解得到观测器增益和故障估计增益.采用正弦故障信号测试算法的有效性、快速性、鲁棒性和精确性.液压空气含量过高和泵堵塞故障的仿真结果表明,自适应LPV故障观测器能够快速、准确地诊断桨距执行器故障.
2 风力机系统描述风力机系统能够将风能转化成电能输出,主要由空气动力子系统、传动子系统、桨距子系统和功率子系统组成[17].从控制的角度看,风力机主要运行在两个区域:部分负载区和全负载区[18].当风力机运行在部分负载区时,桨距角维持在最优值,通过调整发电机速度实现最大功率捕获;在全负载区时,由于风速比较大,一般使发电机速度维持在额定值,通过调整桨距角实现恒功率输出.当风力机运行在全负载区时,桨距系统才起作用,因此文中仅考虑全负载运行区.
2.1 空气动力子系统模型风力机的空气动力学模型一般由作用于叶片的气动力矩表示[17],捕获的风能取决于风速、空气密度、转子半径以及功率系数.风机的空气动力学模型如式(1) 所示:

|
(1) |
其中,ρ为空气密度常数,R为风轮转子半径,vr(t)为有效风速.在风速vr(t)的驱动下带动风轮转子以速度ωr(t)旋转,从而将风能转化为机械能.所转化的效率由功率系数Cp(λ(t),β(t))决定.功率系数Cp(λ(t),β(t))是叶尖速比λ(t)和桨距角β(t)的函数,它是风力机呈现非线性特性的主要因素.
2.2 传动子系统模型传动机构由风轮转子侧的低速轴和发电机侧的高速轴组合而成,风轮捕获风中的动能,使低速轴转动产生相应的机械转矩,然后通过变比为Ng的齿轮箱与高速轴连接,将机械转矩传递到与之相连的发电机上带动发电机旋转.传动系统的模型如式(2) 所示[18]:

|
(2) |

|
(3) |
|
(4) |
其中,Jr、Jg和Br、Bg分别为高、低速轴的转动惯量和摩擦系数. Bdt和Kdt为传动机构的扭力衰减系数和扭转刚度,θΔ(t)为传动系统的输出扭矩角,ωg(t)和Tg(t)分别为发电机速度和力矩.
2.3 功率子系统模型功率系统能够将机械能转换成电能并输送给电网,通过控制发电机力矩Tg(t)来跟踪其参考输出Tg,ref(t),获得相应的功率.发电机产生的电能Pg(t)由发电机速度和负载大小决定.因此,功率系统可以用式(5)、式(6) 来表示[18]:

|
(5) |

|
(6) |
其中,ηg是发电机的效率.
2.4 包含故障的桨距子系统模型桨距系统主要负责调节叶片的桨距角,当风速在额定值和切出值之间时,通过调整桨距角可以实现恒功率输出的目的.桨距系统可以用式(7) 来描述[19]:

|
(7) |
其中,β(t)和βref(t)分别为桨距角实际值和参考值,ωn和ζ分别为桨距执行器的自然频率和阻尼系数.
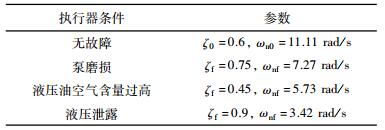
表 1为不同故障情况下对应的参数变化值,而图 1为不同故障时的开环阶跃响应.从图中可以看出,不同参数下的故障将导致响应到达稳定状态的时间不同,甚至发生超调,造成系统的不稳定.

|
| 图 1 不同参数下执行器的阶跃响应 Figure 1 Step response of actuator under different parameters |
控制系统中不确定因子越少越好,所以可以将桨距系统中的参数ωn2和ζωn用故障指示因子θf∈[0 1]的形式来描述:
|
(8) |
这里的θf=0对应ωn2=ωn02,ζωn=ζfωn0的无故障执行器;θf=1对应ωn2=ωnf2,ζωn=ζfωnf的故障执行器.
因此带有故障的桨距系统可以进一步描述成如下形式,如式(9) 所示:
|
(9) |

|
为待估计的故障.当桨距执行器故障时,fβ将发生相应的变化.将桨距执行器的参数变化故障同一转化为fβ,可以使问题得以简化.
2.5 风力机LPV模型综合上述2.1节~2.4节的各子模型可得到风力机系统的组合模型,如图 2所示.

|
| 图 2 风力机系统框图 Figure 2 The block diagram of the wind turbine system |
风力机系统呈现非线性特性的主要原因由气动子模型中的功率系数Cp(λ(t),β(t))决定[20].传统处理风力机非线性特性的方法是对气动力矩Tr(t)在运行点(vr(t),ωr(t),β(t))的轨迹上逐点线性化,获得一系列线性化模型,然后利用调度函数调度不同点下的线性模型,建立LPV模型.在所建立的模型中将风轮转子速度ωr(t)和桨距角β(t)的变化归结为风速的变化,并且选择风速为调度变量:θ=vr(t).文中采用文[21]的优化LPV建模方法.将风力机的气动方程式(1) 转化为

|
(10) |
其中,

|
| 图 3 风力机气动参数 Figure 3 Aerodynamic parameters of wind turbines |
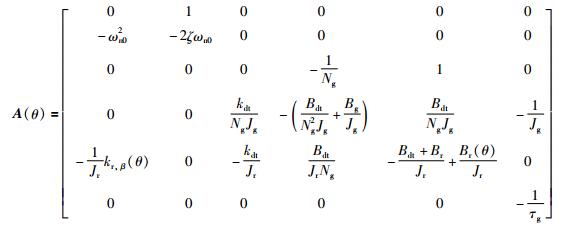
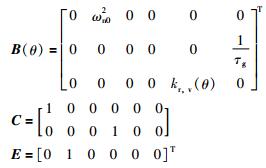
在上述建立的风速和气动参数关系的基础上,仍然选取风速作为LPV模型中的调度变量,选取桨距角参考值和发电机力矩参考值作为控制输入,考虑扰动输入风速,记u(t)=[βref(t),Tg,ref(t),vr(t)]T,并且选取发电机速度和桨距角作为观测输出y(t)=[ωg(t),β(t)]T.同时考虑系统的状态变量x(t)=[β(t),

|
(11) |

|
(12) |
|
|
为了估计式(11) 中的桨距执行器故障f(t),设计下列自适应LPV故障观测器:
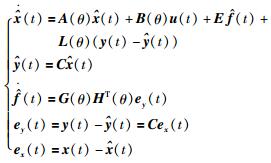
|
(13) |
其中,L(θ)是观测器增益,

针对自适应LPV故障观测器式(13),设计具有快速性、鲁棒性和灵敏性的故障观测器.即通过设计观测器增益L(θ)和故障更新增益H(θ)实现下列目标:
(1) 保证观测矩阵Ae(θ)=A(θ)-L(θ)C(θ)稳定;
(2) 快速估计
(3) 对扰动风速具有鲁棒性;
(4) 使得故障误差:ef(t)=f(t)-
为此假设:(A(θ),B(θ))可控,(A(θ),C)可观,并且故障f(t)是有界可微的.结合故障误差ef(t)=f(t)-

|
(14) |
其中f0为故障发生前的值,通常设置为零.
3.2 自适应LPV故障观测器设计条件为了获得满足要求的自适应LPV故障观测器增益L(θ)和故障更新增益H(θ),一般只考虑矩阵A(θ)对观测器的影响.然而,在系统发生故障时,观测器的稳定性不仅依赖于矩阵A(θ),也依赖于故障矩阵E.从而必须将矩阵E对系统的影响考虑在内.将文[22]的算法扩展到LPV系统,并且改进其限制条件,得到满足要求的自适应LPV故障观测器设计定理.
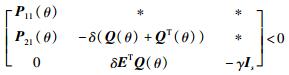
定理1 对于给定的正可调参数δ∈R,如果存在对称的正定矩阵P(θ)、矩阵Q(θ)、矩阵H(θ)、矩阵Y(θ)以及单位矩阵I∈Rs×s和一个正定因子γ∈R,满足下列不等式条件[22-23]

|
(15) |
|
(16) |
则设计的自适应LPV故障观测器能够确保观测矩阵Ae(θ)稳定,故障误差趋近于零并且对风扰动具有较强的鲁棒性同时对故障具有较快的估计速度和估计精度.其中,*表示矩阵对称,

|
并且

|
(17) |
从而得到自适应LPV故障观测器增益和故障更新增益:
|
(18) |
证明 根据式(11) 和式(13),对系统状态误差求导有:

|
(19) |
整理得:

|
(20) |
参考文[24]并结合上述定理1,考虑下列李亚普诺夫函数:

|
(21) |
其中P(θ)=PT(θ) > 0,G(θ)=GT(θ) > 0. γ是ef(t)与ex(t)的H∞范数平方.对式(21) 求导有:
|
(22) |
将式(13) 中的更新法则和式(14) 带入式(22) 整理后可得:
|
(23) |
根据式(20),定义下列条件:

|
(24) |
将式(24) 带入式(23) 整理后可得:
|
(25) |
定义下列条件:
|
(26) |
可以得到:
|
(27) |
将式(27) 带入式(25) 有:
|
(28) |
记:

|
(29) |
其中,
根据定理1可以求解得到观测器增益L(θ)和故障更新增益H(θ).但由于调度变量风速在运行区域是连续变化的,使得矩阵连续变化,这样就需要求解无穷个线性矩阵不等式.为了解决此问题,采用文[25]中提出的边界箱思想.只考虑调度变量在运行区域的最大值和最小值,建立运行区域的凸包,各矩阵在凸包范围内变化,即:

|
(30) |
其中,
在凸多面体近似中没有直接体现调度变量θ,但是αi(θ)为时变参数θ的线性函数,且其可以在线求得.因此,αi(θ)能够体现调度变量对非线性系统的转化作用.从而可以将限制条件式(15)~式(17) 转化为有限个LMIs:
|
(31) |
|
(32) |
其中P11,i=QiTAi+AiTQi-YiC-CTYiT+CTC,P21,i=Pi-Qi+δQiTAi-δYiC.
并且

|
(33) |
通过求解有限个LMIs,可以得到观测器增益和故障更新增益:

|
进行故障观测器搭建时选取桨距角参考值和发电机力矩参考值作为输入,风速作为调度变量,发电机速度和桨距角作为观测输出,x(t)为系统状态:x(t)=[β(t),
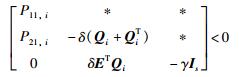
风力机系统的仿真参数如表 2所示.选取仿真风速如图 4所示,仿真运行100 s.

|
| 图 4 仿真风速 Figure 4 Simulated wind speed |
首先设置正弦故障作为标准测试性故障验证所设计的自适应LPV故障观测器的有效性,然后在此基础上处理风力机桨距执行器中的液压空气含量过高和泵堵塞故障,并与文[22]中提到的观测器的观测结果进行对比,从而进一步说明本文提出的算法在灵敏度和快速性方面具有明显的优势.
(1) 测试性故障
故障1 执行器正弦失效,在30 s~50 s加入正弦故障,其故障模式输出可以表示为

|
(2) 桨距执行器故障
故障2 在60 s时出现桨距执行系统液压泵堵塞引起的执行器被卡死故障,故障持续10 s.
故障3 在80 s时出现液压空气含量过高故障,10 s后故障消失.
4.2 仿真结果分析根据参考文[22]中给出的条件求解得到自适应观测器增益L和故障更新增益H.
|
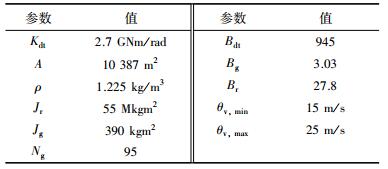
利用LMIs工具求解定理1中的不等式,可以得到自适应LPV故障观测器增益L(θ)和故障更新增益H(θ).由前面提出的边界箱理论,选择风速的极值作为调度参数的顶点,可以得到所选择的调度变量的取值范围为:θ=[15 m/s,25 m/s].根据文[26]的方法,选取调度函数为

|
求解得到观测器增益和故障更新增益分别为
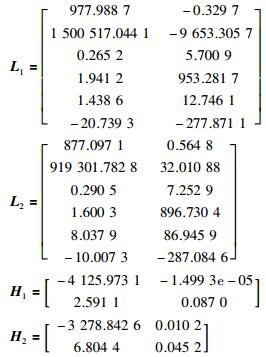
|
如图 5所示,在30 s~50 s加入正弦失效故障,自适应LPV故障观测器能够快速跟随正弦信号变化轨迹,比较准确地观测出故障信号,证明该观测器算法是有效的.对比发现,其灵敏度、快速性和准确性均优于自适应故障观测器.

|
| 图 5 观测器估计故障与实际故障—正弦 Figure 5 Estimation of fault of observer and real fault-sinusoidal |
桨距执行器被卡死故障和液压空气含量过高故障都是常见的执行器故障.桨距执行器卡死故障通常是由液压传动系统中的泵堵塞引起的,该故障会使执行器失效,桨距角无法调整输出定值,极易造成系统失控;液压空气含量过高故障将导致桨距执行器动态响应变慢,造成系统不稳定.本文选取这两种典型的执行器故障作为研究重点:在60 s时发生桨距执行系统液压泵堵塞故障,故障持续10 s,如图 6所示,故障发生和消失的瞬间会引起较大的超调,故障期间桨距角直接变成固定值,自适应故障观测器能够观测出该故障,但存在一定的延迟,相比之下,自适应LPV故障观测器的响应时间和快速性能更优.同时,由图 7可以看出,该观测器能够比较快速准确地获得动态响应的故障信号,有效地克服了延迟.在80 s时发生液压空气含量过高故障,如图 8所示,液压空气含量过高故障使得桨距执行器响应变慢,桨距角得不到相应的调整产生波动,与自适应故障观测器相比,自适应LPV故障观测器的观测结果更接近于执行器的实际输出,精度更高.同时,从图 9可以看出,该观测器捕获的故障信号幅值更大,对故障变化的检测能力更强,灵敏度更高.由此可见,自适应LPV故障观测器检测故障的响应时间、快速性和灵敏度均优于自适应故障观测器.另外,由仿真结果可以看出,不同故障对桨距角造成不同的影响,通过将观测器的观测结果与实际桨距角的波形进行对比得到故障残差,根据残差的大小和状态可以看出不同故障下其大小和变化趋势也不同,因此可以通过残差变化情况来判断故障的所属类型.

|
| 图 6 桨距执行器输出—泵堵塞 Figure 6 Pitch actuator output-pump blockage |

|
| 图 7 观测器估计故障—泵堵塞 Figure 7 Observer estimation failure-pump blockage |

|
| 图 8 桨距执行器输出—液压油空气含量过高 Figure 8 Pitch actuator output-high air content in oil |

|
| 图 9 观测器估计故障—液压油空气含量过高 Figure 9 Observer estimation fault-high air content in oil |
桨距执行器故障时将导致桨距角无法及时调整,严重影响风力机的稳定运行.本文选取风速作为调度变量,在风力机LPV模型的基础上进行自适应LPV故障观测器设计.同时考虑故障和扰动对系统的影响,得到自适应LPV故障观测器的限制条件.利用凸分解技术和LMIs工具,求解观测器增益L(θ)和故障更新增益H(θ).通过设置执行器正弦失效故障验证自适应LPV故障观测器的有效性.针对桨距执行器中的液压空气含量过高和泵堵塞引起的桨距执行器响应变慢和卡死问题,将自适应LPV故障观测器与自适应故障观测器的观测结果进行对比,进一步说明了自适应LPV故障观测器在快速性和灵敏度方面的优势.
| [1] |
惠晶, 方光辉.
新能源转换与控制技术[M]. 第三版. 北京: 机械工业出版社, 2008.
Hui J, Fang G H. New energy conversion and control technology[M]. 3th ed. Beijing: Machinery Industry Press, 2008. |
| [2] |
沈艳霞, 李帆.
风力发电系统故障诊断方法综述[J].控制工程, 2013, 20(5): 789–795.
Shen Y X, Li F. Review of fault diagnosis methods for wind power generation system[J]. Control Engineering of China, 2013, 20(5): 789–795. |
| [3] |
沈艳霞, 贺庆楠, 潘庭龙, 等.
风能转换系统T-S模糊鲁棒容错控制[J].信息与控制, 2013, 42(6): 750–757, 764.
Shen Y X, He Q N, Pan T L, et al. T-S fuzzy robust fault-tolerant control strategy for wind energy conversion system[J]. Information and Control, 2013, 42(6): 750–757, 764. |
| [4] |
刘璐洁, 符杨, 马世伟, 等.
基于运行状态监测与预测的海上风机维护策略[J].电网技术, 2015, 39(11): 3292–3297.
Liu L J, Fu Y, Ma S W, et al. Offshore wind turbine maintenance strategy based on operational condition monitoring and prediction[J]. Power System Technology, 2015, 39(11): 3292–3297. |
| [5] | Sloth C, Esbensen T. Fault diagnosis and fault tolerant control of wind turbines[D]. Aalborg, Denmark: Aalborg University Press, 2009. |
| [6] | Vidal Y, Tutivén C, Rodellar J, et al. Fault diagnosis and fault-tolerant control of wind turbines via a discrete time controller with a disturbance compensator[J]. Energies, 2015, 8(5): 4300–4316. DOI:10.3390/en8054300 |
| [7] |
沈艳霞, 季凌燕, 纪志成.
基于径向基函数神经网络故障观测器的风能转换系统容错控制器设计[J].信息与控制, 2015, 44(3): 359–366.
Shen Y X, Ji L Y, Ji Z C. Wind energy conversion system fault-tolerant controller based on the radial basis function netural network fault observer[J]. Information and Control, 2015, 44(3): 359–366. |
| [8] | Wu X, Li Y, Li F, et al. Adaptive estimation-based leakage detection for a wind turbine hydraulic pitching system[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(5): 907–914. DOI:10.1109/TMECH.2011.2142400 |
| [9] | Peng T, Pei T R. The application of neural network method in hydraulic pump fault diagnosis[J]. Natural Science Journal of Xiangtan University, 2009, 31(1): 148–151. |
| [10] |
李伟昌, 张磊.
基于风力发电系统的风电机组变桨距故障诊断[J].计算机仿真, 2015, 32(9): 147–151.
Li J C, Zhang L. Variable pitch fault diagnosis of wind turbine generator based on wind power generation system[J]. Computer Simulation, 2015, 32(9): 147–151. |
| [11] | Inthamoussou F A, Bianchi F D, De Battista H, et al. LPV wind turbine control with anti-windup features covering the complete wind speed range[J]. IEEE Transactions on Energy Conversion, 2014, 29(1): 259–266. DOI:10.1109/TEC.2013.2294212 |
| [12] | Cao L, Hu X, Chen R, et al. Wind turbine modeling based on a multi-model LPV structure[C]//2015 International Industrial Informatics and Computer Engineering Conference. Atlantis Press, 2015. |
| [13] | Chouiref H, Boussaid B, Abdelkrim M N, et al. LPV model-based fault detection: Application to wind turbine benchmark[C]//7th International Conference on Modelling, Identification and Control (ICMIC 2014). Piscataway, NJ, USA: IEEE, 2014: 1-5. |
| [14] | Kulcsar B, Verhaegen M. Robust inversion based fault estimation for discrete-time LPV systems[J]. IEEE Transactions on Automatic Control, 2012, 57(6): 1581–1586. DOI:10.1109/TAC.2011.2176160 |
| [15] | Shi F, Patton R J. A robust adaptive approach to wind turbine pitch actuator component fault estimation[C]//Ukacc International Conference on Control. Piscataway, NJ, USA: IEEE, 2014: 468-473. |
| [16] | Shi F, Patton R. An active fault tolerant control approach to an offshore wind turbine model[J]. Renewable Energy, 2015, 75: 788–798. DOI:10.1016/j.renene.2014.10.061 |
| [17] | Odgaard P F, Stoustrup J, Kinnaert M. Fault-tolerant control of wind turbines: A benchmark model[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1168–1182. DOI:10.1109/TCST.2013.2259235 |
| [18] | Munteanu I, Bratcu A I, Cutululis N A, et al. Optimal control of wind energy systems: Towards a global approach[M]. Springer Science & Business Media, 2008. |
| [19] | Shi F, Patton R. An active fault tolerant control approach to an offshore wind turbine model[J]. Renewable Energy, 2015, 75: 788–798. DOI:10.1016/j.renene.2014.10.061 |
| [20] |
宋锦, 吴定会, 李意扬, 等.
基于虚拟传感器的风力机LPV容错控制[J].信息与控制, 2015, 44(4): 474–480.
Song J, Wu D H, Li Y Y, et al. Wind turbine LPV fault-tolerant control based on virtual sensors[J]. Information and Control, 2015, 44(4): 474–480. |
| [21] | Wu D H, Song J, Ji Z, et al. A new optimization method for linear parameter varying modeling of wind turbines[C]//34th Control Conference (CCC). Piscataway, NJ, USA: IEEE, 2015. |
| [22] | Zhang K, Jiang B, Cocquempot V. Adaptive observer-based fast fault estimation[J]. International Journal of Control Automation & Systems, 2008, 6(3): 320–326. |
| [23] | Wang H, Daley S. Actuator fault diagnosis: An adaptive observer-based technique[J]. IEEE Transactions on Automatic Control, 1996, 41(7): 1073–1078. DOI:10.1109/9.508919 |
| [24] |
李艳辉, 刘雅喆, 姜寅令, 等.
离散LPV重复过程的鲁棒H∞状态反馈控制[J].科学技术与工程, 2011, 11(8): 1737–1739.
Li Y H, Liu Y Z, Jiang Y L, et al. Robust H∞state feedback control in discrete LPV repeat process[J]. Science Technology and Engineering, 2011, 11(8): 1737–1739. |
| [25] | Apkarian P, Gahinet P, Becker G. Self-scheduled H∞control of linear parameter-varying systems: A design example[J]. Automatica, 1995, 31(9): 1251–1261. DOI:10.1016/0005-1098(95)00038-X |
| [26] | Rodrigues M, Theilliol D, Aberkane S, et al. Fault tolerant control design for polytopic LPV systems[J]. International Journal of Applied Mathematics and Computer Science, 2007, 17(1): 27–37. DOI:10.2478/v10006-007-0004-5 |