



2. 中国科学技术大学信息科学实验中心, 安徽 合肥 230026
2. Information Science Laboratory Center of University of Science and Technology of China, Hefei 230027, China
1 引言
为空间科学实验提供必要的高微重力环境是载人空间飞行器应用的一项重要课题.良好的空间微重力环境是取得理想实验效果的重要基础,然而,由于航天器变轨、航天员运动等各种扰动作用的影响,飞行器内部难以达到理想的微重力水平[1-3].
为此,美国、加拿大[4-8]等国早在20世纪80年代初就开展了主动隔振技术的研究,并在航天飞机及空间站上进行了主动隔振装置的技术验证和实际应用.
随着我国载人航天工程的逐步推进,我国即将进入空间站建设时期,未来将有大量微重力科学项目在空间站开展实验研究.为了满足空间科学实验对高微重力环境的要求,中国科学院空间科学与应用总体部研发了一套空间微重力主动隔振系统[9-10].
针对主动隔振控制问题,国内外研究学者提出了许多方法,主要有自适应控制[11]、神经网络控制[12]、H∞控制[13]等.这些方法各有优势,同时也存在着一些的限制,例如,自适应控制、神经网络控制算法较为复杂,H∞控制方法对精确的对象模型依赖性较高.然而,由于空间微重力主动隔振系统存在显著的模型不确定性问题,且处于对实际工作环境和工程实现的考虑,对控制算法有着结构简单、计算快、存储空间小且鲁棒性强的设计要求.从国外研究的情况来看,无论是早期的STABLE、MIM-1,还是后来的MIM-2和g-LIMIT,都把基于经典控制理论的PID控制作为控制器设计的首选算法.
针对中科院研发的空间微重力主动隔振系统,刘伟等在对系统模型进行线性化的基础上,采用模型补偿和PID技术提出了主动隔振系统的控制方案[14].然而,由于系统位置控制和隔振控制的双重控制目标之间存在一定的矛盾,而忽略了这种矛盾的PID控制系统的隔振性能尚有很大的提升空间.
针对上述不足,本文对空间微重力主动隔振系统的控制方法展开了进一步研究.首先,详细分析了主动隔振系统的物理结构及动力学模型,指出了系统位置控制和隔振控制双重目标之间存在的矛盾.而后,提出了一种结构简单、计算量小的自抗扰控制算法,通过针对性地设计位置控制回路和加速度控制回路,巧妙缓解了双重控制目标之间存在的矛盾,使得系统在满足位置控制的基础上,有效保证了系统的隔振能力.最后,通过数值仿真和对比分析,验证了所提控制方法的有效性和先进性.
2 主动隔振系统及其动力学模型 2.1 空间高微重力主动隔振系统空间微重力主动隔振装置结构如图 1所示.隔振装置主体主要由定子和浮子两部分组成.定子是装置的支撑单元,浮子是科学实验载荷的实验平台.浮子和定子通过脐带线(主要是电缆线)相连.电磁激励器[15]位于浮子与定子之间,用于提供抑制载荷振动的主动控制力.

|
| 图 1 微重力主动隔振系统结构示意图 Figure 1 The schematic diagram of the microgravity active isolation system |
此外,隔振装置上还安装有位移和加速度传感器[16-17],用以测量浮子与定子之间的相对位移(3个相对平动位移和3个相对转动角度)和浮子的惯性加速度(3个平动加速度和3个转动角加速度).
在航天器实际运行过程中,定子与航天器直接接触,因此航天器变轨、航天员行动等因素必然造成定子的振动,进而,通过脐带线又会将振动传递至浮子,从而降低了浮子的失重水平.微重力主动隔振系统的主要目标就是隔离来自定子的扰动信息,实现浮子惯性加速度的最小化,即浮子微重力的最小化,达到理想的失重水平.同时,考虑到浮子作为实验平台的工作性质及激励器等设备的工况,还需要对浮子的位移进行控制[18],在隔振的同时保证浮子相对定子的位置在给定行程约束范围内.这同样是控制器设计时需要达到的另一个重要目标.
值得注意的是,位置控制不可避免地会对浮子微重力的抑制产生影响,例如,准确的相对位置控制必然使得浮子跟随定子的位置一同振动,破坏系统要求的扰动隔离.由此可以看出,位置控制和隔振控制存在着一定程度上的矛盾,简单地对两个指标分别进行控制,难以取得理想的效果.
2.2 主动隔振平台动力学模型

|
| 图 2 微重力主动隔振系统坐标系 Figure 2 The coordinate system of the microgravity active isolation system |
惯性坐标系xyzN的原点N0为地心,x轴指向春分点,z轴垂直于赤道面,与地球自转角速度方向相同. x轴、y轴、z轴构成右手直角坐标系.
轨道坐标系xyzO的原点O0为航天器质心,z轴指向地心,x轴位于轨道平面内,与z轴垂直并指向前进的方向,x轴、y轴、z轴构成右手直角坐标系.
航天器本体坐标系xyzB的原点B0为航天器质心,固联于航天器上.
定子坐标系xyzS的原点S0为定子质心,固联于定子上.
浮子坐标系xyzF的原点F0为浮子质心,固联于浮子上.
根据浮子、定子、航天器之间的相对运动以及受力分析,可推导出隔振系统非线性动力学方程[16]如式(1):
|
(1) |

|
其中:
上标“(S)”、“(F)”分别表示该向量是在浮子坐标系xyzS和定子坐标系xyzF上的投影.
(S)x=[xxxyxz]T表示浮子相对定子的平动位置矢量,
(S)ω、(S)α分别对应浮子坐标系相对定子坐标系的角速度矢量和角加速度矢量;
(S)rN0S0、(S)rN0F0分别是由地心指向定子质心和浮子质心的距离矢量;
μE=3.986×105 km3/s3为地球引力常数,Im为浮子转动惯量矩阵,(S)ω0为航天器轨道角速度矢量;
(S)fu、(F)Mu分别为脐带线产生的摄动加速度与力矩,表达式为
|
(2) |
|
(3) |
(S)fd、(F)Md为其它摄动加速度和力矩的矢量和;(S)fzd、(F)Mzd为激励器产生的控制加速度和控制力矩.
考虑到定子理想运动状态为固联在航天器上,相对航天器无转动运动,此时定子的微重力加速度fS[16]可表示为

|
(4) |
浮子微重力加速度fF[16]可表示为
|
(5) |
文[16]详细讨论了动力学方程及相关变量的推导和计算,这里不再赘述.
由式(2) 和式(3) 可以看出,由于脐带线的作用,浮子平动与转动之间存在相互耦合.并且,隔振系统不仅要对六自由度位置进行控制,还需要有效降低浮子微重力fF,因此对于六自由度的控制量,系统还存在欠驱动问题.上述因素都增加了控制器的设计难度.
3 主动隔振系统ADRC控制器设计自抗扰控制[20](active disturbance rejection control,ADRC)是20世纪90年代由韩京清先生在PID技术的基础上提出来的,因其设计简单、鲁棒性强以及主动抗扰能力优越等特点,一经提出便得到了广泛研究[21-23].高志强[24]基于带宽思想,进一步提出了线性自抗扰控制方法.该方法在继承自抗扰控制技术的优良性能的同时,简化了控制器参数整定,且大量研究和应用表明线性自抗扰方法对复杂的非线性不确定对象同样具有良好的控制效果.
针对主动隔振系统位置控制和隔振控制的双重控制目标,本文基于线性自抗扰的方法,设计了主动隔振系统ADRC控制器.控制器由加速度控制回路、位置控制回路以及模型信息补偿三部分组成,结构如图 3所示.

|
| 图 3 空间高微重力主动隔振系统ADRC控制器结构图 Figure 3 Block diagram of the ADRC controller for the microgravity active isolation system |
位置控制回路用于控制浮子与定子之间保持在有效的位置范围内,即满足行程约束.
3.1.1 位置跟踪微分器(tracking-differentiator of position,TDP)为了获得位置信号的跟踪信号及微分信号,设计线性跟踪微分器如下:

|
(6) |
其中,
本文之所以采用跟踪微分器获取位置及速度的跟踪信号而不是直接将传感器测量的位置信号及其微分用于反馈控制,一方面是为了提高系统对测量噪声的鲁棒性,更重要的是考虑到上述位置控制与加速度控制之间的矛盾,采用跟踪微分器能够有针对性地衰减位置反馈信号中的高频分量,主动滤除由于定子振动引起的相对位置高频振动信息,从而使浮子在惯性参考系下保持静止,进而有效克服了双重控制目标之间存在的矛盾.
3.1.2 位置误差反馈(position error feedback,PEF)通过选择合适的跟踪微分器带宽wtpi,使得z1→p,z2→

|
(7) |
其中,r=[r1 r2 r3 r4 r5 r6]T为浮子相对定子的参考位置向量,kppi、kdpi为控制器增益.
采用“带宽调制法”整定控制器参数,令

|
(8) |
得到:

|
(9) |
微重力控制回路通过对微重力信号的反馈控制,达到衰减微重力水平的目的.
3.2.1 微重力跟踪微分器(tracking-differentiator of microgravity,TDM)设计微重力跟踪微分器:

|
(10) |
其中,ζj1、ζj2为浮子微重力fFj的跟踪信号及微分信号,wtmj为跟踪微分器带宽.
3.2.2 微重力误差反馈(microgravity error feed-back,MEF)设计线性微重力误差反馈控制律为

|
(11) |
其中,kpmj、kdmj为控制器增益,令

|
(12) |
得到:

|
(13) |
事实上,由于控制目标之间的矛盾,微重力控制必然对位置控制造成一定的影响:一方面增大了稳态相对位置误差,另一方面使得初始瞬态相对位置的震荡增强,甚至超过系统要求的行程约束.
针对上述影响,本文首先通过两个回路的参数配合,在位置稳态误差上达到一个较好的折中.进一步在微重力控制回路设置时间常量t0,对控制律进行“过渡”:
|
(14) |
上述方法能够有效改善微重力控制对位置控制瞬态性能的影响.
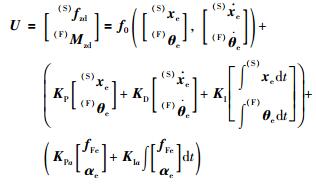
3.3 模型信息补偿为了进一步优化控制效果,针对性地补偿脐带线对隔振系统的影响,本文在位置控制和微重力控制回路的基础上,加入模型信息补偿[11]:
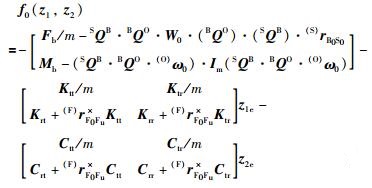
|
(15) |
其中,
|
(16) |
为位置和速度偏差,其它参数为系统已知参数,这里不再赘述.
综合上述两个回路,得到ADRC控制器的综合控制律:
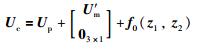
|
(17) |
为了验证所设计控制器的有效性和先进性,本文搭建了基于Matlab/Simulink的微重力主动隔振系统仿真平台,对隔振系统ADRC控制方案进行数值仿真,并与现有的PID方案展开进一步的对比分析.
为了简化控制器参数整定,各路控制器均选取同一参数如表 1所示.
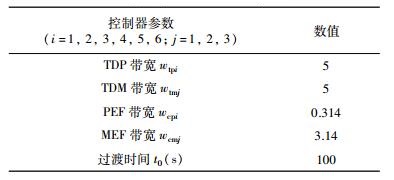
|
PID控制方案[14]控制算法:
|
(18) |
其中:
(1) (S)xe、(F)θe分别为位置误差和姿态角误差,

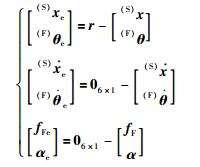
|
(19) |
(2) 
(3) KP、KI、KD、Kpa、KIa为控制器参数,选取如表 2所示.
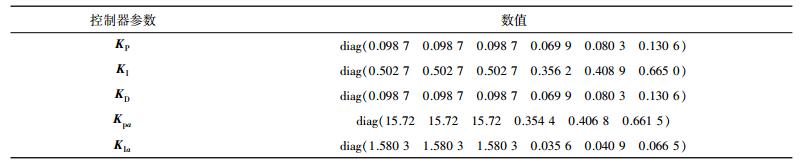
|
此外,隔振系统参数参考文[14].
设定子微重力为

|
(20) |
其中,fS0为定子理想微重力,可由式(4) 得到,
首先,针对单频定子扰动进行仿真.令n=1,a1=1 800 μg,f1=1 Hz,仿真结果如图 4~图 6所示.

|
| 图 4 单频扰动下浮子相对三轴定子位置误差 Figure 4 The position error of three axes of the floater relative to the stator |

|
| 图 5 单频扰动下三向浮子微重力 Figure 5 The floater′s microgravity of three axes under the single frequency vibration |

|
| 图 6 单频扰动下三向激励器输出控制力 Figure 6 The output force of the actuator under the single frequency vibration |
而后,为了计算浮子微重力在不同频率定子扰动下的衰减倍数,加入定子混频扰动,如图 7所示.数值仿真结果如图 8~图 12所示.

|
| 图 7 三向定子扰动频谱图 Figure 7 The spectrogram of the stator′s vibration of three axes |

|
| 图 8 混频扰动下浮子相对定子三轴位置误差 Figure 8 The position error of three axes of the floater relative to the stator under the mixing vibration |

|
| 图 9 混频扰动下三向浮子微重力 Figure 9 The floater′s microgravity of three axes under the mixing vibration |

|
| 图 10 PID控制器下三向浮子微重力频谱图 Figure 10 The spectrogram of the floater′s microgravity of three axes under PID controller |

|
| 图 11 ADRC控制器下三向浮子微重力频谱图 Figure 11 The spectrogram of the floater′s microgravity of three axes under ADRC controller |

|
| 图 12 混频扰动下三向激励器输出控制力 Figure 12 The output force of three axes of the actuator under |
进一步计算浮子微重力相对定子扰动的衰减倍数,如表 3所示.
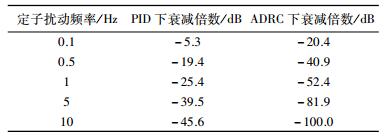
|
就位移控制而言,由图 4和图 8可以看出,本文提出的ADRC方案能够保证浮子相对定子在较小的范围内运动,不超出系统要求±10 mm的行程约束.同时,ADRC方案的瞬态性能优于PID方案,这进一步体现了加速度回路中采用“过渡”方法带来的性能改善.
就浮子微重力控制而言,由图 5、9、10、11及表 3可以看出,与PID方案相比,ADRC方案具有显著优越的隔振能力.
此外,由图 6和图 12可以看出,相比PID方案,ADRC方案下执行机构输出的控制力更小、更平缓,有效预防了执行机构输出饱和的问题,同时也提高了空间实验平台的能源利用效率.
4 结论本文研究了基于自抗扰技术的空间微重力主动隔振系统控制器设计方法.首先,通过对微重力主动隔振系统的结构、模型以及控制目标的分析,指出位移控制和隔振控制之间存在着矛盾.进而,提出一种自抗扰控制策略,在位置控制回路针对性地设计了跟踪微分器,在满足位置控制要求的前提下,有效缓解了控制目标上的矛盾.在此基础上,设计微重力控制回路,显著提高了系统的隔振能力.最后,数值仿真验证了所提控制方案控制性能优良,较原有方案具有显著的优越性.此外,本文在控制器设计过程中采用跟踪微分器主动滤除相对位置信号中的高频分量,对同类隔振问题具有一定的参考意义.同时,在控制律中设置“过渡时间”的手段提供了一种优化控制系统瞬态性能的新思路.
致谢: 本文的工作还要感谢中国科学技术大学信息科学实验中心提供的软硬件支持.| [1] | Liu C, Jing X, Daley S, et al. Recent advances in micro-vibration isolation[J]. Mechanical Systems and Signal Processing, 2015, 56(1): 55–80. |
| [2] | Han W, Sun J, Li D, et al. The research on three axis-six DOF disturbance force test technology and its application[C]//2014 International Conference on Reliability, Maintainability and Safety (ICRMS). Piscataway, NJ, USA: IEEE, 2014: 674-677. |
| [3] | Zhu F, Shi Z, Gong Z, et al. Study of space micro-vibration active isolation platform acceleration measurement[C]//2015 IEEE International Conference on Mechatronics and Automation (ICMA). Piscataway, NJ, USA: IEEE, 2015: 1289-1294. |
| [4] | Edberg D, Boucher R, Schenck D, et al. Results of the STABLE microgravity vibration isolation flight experiment[J]. Guidance and Control, 1996, 96(1): 567–581. |
| [5] | Yu Q, Jin D R. Introduction to the theory and examples of the microgravity vibration isolation system[J]. Manned Spacefl, 2008, 3(1): 16–18. |
| [6] | Grodsinsky C M, Whorton M S. Survey of active vibration isolation systems for microgravity applications[J]. Journal of Spacecraft and Rockets, 2000, 37(5): 586–596. DOI:10.2514/2.3631 |
| [7] | Whorton M S. Glovebox Integrated Microgravity Isolation Technology (g-LIMIT): A linearized state-space model[J]. Keystone, CO, USA: AIAA, 2004. |
| [8] | Liu J, Li Y, Zhang Y, et al. Dynamics and control of a parallel mechanism for active vibration isolation in space station[J]. Nonlinear Dynamics, 2014, 76(3): 1737–1751. DOI:10.1007/s11071-014-1242-3 |
| [9] | Ren W, Li Z, Gao Y. Microgravity active vibration isolation system for space science in china[J]. Prague, CZ: AC, 2010. |
| [10] |
李宗峰, 任维佳.
空间微重力主动隔振技术研究[J].载人航天, 2010, 8(3): 24–32.
Li Z F, Ren W J. Space microgravity active vibration isolation technology research[J]. Manned Space flight, 2010, 8(3): 24–32. |
| [11] | Soleymani M, Montazeri-Gh M, Amiryan R. Adaptive fuzzy controller for vehicle active suspension system based on traffic conditions[J]. Scientia Iranica, 2012, 19(3): 443–453. DOI:10.1016/j.scient.2012.03.002 |
| [12] | Baig R U, Pugazhenthi S. Neural network optimization of design parameters of stewart platform for effective active vibration isolation[J]. Journal of Engineering and Applied Sciences, 2014, 9(4): 78–84. |
| [13] |
孟建军, 牟健, 晏永, 等.
高速列车垂向振动鲁棒H∞控制器设计[J].现代制造工程, 2015, 37(12): 28–33.
Meng J J, Mou J, Yan Y, et al. Robust H∞control of high-speed train vertical vibration based on LMI[J]. Moder Manufacturing Engineering, 2015, 37(12): 28–33. DOI:10.3969/j.issn.1671-3133.2015.12.007 |
| [14] | Liu W, Dong W B, Wang W B, et al. Modelling and simulation for microgravity active vibration isolation platform in space[J]. Toronto, Canada: IAC, 2014. |
| [15] |
陈进新, 王宇.
空间微重力磁悬浮平台激励器研究[J].空间科学学报, 2008, 28(6): 584–591.
Chen J X, Wang Y. Study on actuators of magnetic suspension platform under microgravity environment in space[J]. Chinese Journal of Space Science, 2008, 28(6): 584–591. DOI:10.11728/cjss2008.06.584 |
| [16] |
李宗峰.
空间微重力环境下主动隔振系统的三维位置测量[J].宇航学报, 2010, 31(6): 1625–1630.
Li Z F. 3D position measurement of active vibration isolation system under space microgravity[J]. Journal of Astronautics, 2010, 31(6): 1625–1630. |
| [17] |
李宗峰, 任维佳, 王安平.
空间高微重力主动隔振系统加速度测量研究[J].振动与冲击, 2010, 29(12): 211–215.
Li Z F, Ren W J, Wang A P. Study on acceleration measurement in space high quality microgravity active vibration isolation system[J]. Journal of Vibration and Shock, 2010, 29(12): 211–215. DOI:10.3969/j.issn.1000-3835.2010.12.047 |
| [18] | 李宗峰, 任维佳, 王安平, 等. 空间高微重力主动隔振系统有限行程约束分析[C]//中国空间科学学会第七次学术年会会议手册及文集. 大连, 中国: 中国学术期刊电子出版社, 2009: 117-123. Li Z F, Ren W J, Wang A P, et al. Analysis of limited track on space high microgravity active vibration isolation system[C]//Meeting Manual and Proceedings of the 7th Annual Conference of Chinese Society of Space Research. Dalian, China: China Academic Journal Electronic Publishing House, 2009: 117-123. |
| [19] |
李宗峰, 刘强, 任维佳.
空间高微重力主动隔振系统动力学建模[J].振动与冲击, 2010, 29(7): 1–4.
Li Z F, Liu Q, Ren W J. Dynamic modeling for a space high quality microgravity active vibration isolation system[J]. Journal of Vibration and Shock, 2010, 29(7): 1–4. |
| [20] |
韩京清.
自抗扰控制及其应用[J].控制与决策, 1998, 13(1): 19–23.
Han J Q. Active disturbance rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 19–23. |
| [21] |
薛文超, 黄朝东, 黄一.
飞行制导控制一体化设计方法综述[J].控制理论与应用, 2013, 30(12): 1510–1519.
Xue W C, Huang C D, Huang Y. Design methods for the integrated guidance and control system[J]. Control Theory and Applications, 2013, 30(12): 1510–1519. |
| [22] |
吴忠, 黄丽雅, 魏孔明, 等.
航天器姿态自抗扰控制[J].控制理论与应用, 2013, 30(12): 1616–1621.
Wu Z, Huang L Y, Wei K M, et al. Active disturbance rejection control of attitude for spacecraft[J]. Control Theory and Applications, 2013, 30(12): 1616–1621. |
| [23] |
张楷田, 楼张鹏, 王永, 等.
混合小推力航天器日心悬浮轨道保持控制[J].航空学报, 2015, 36(12): 3910–3918.
Zhang K T, Lou Z P, Wang Y, et al. Station-keeping control of spacecraft using hybrid low-thrust propulsion in heliocentric displaced orbits[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(12): 3910–3918. |
| [24] | Gao Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference. Piscataway, NJ, USA: IEEE, 2003: 4989-4996. |