



1 引言
飞行控制系统是无人机的重要组成部分,其核心飞行控制计算机的性能直接影响无人机任务完成的优劣,可靠性决定了无人机的生存能力[1].
目前,国内基于CAN总线分布式飞行控制计算机[2]已经成功应用于型号无人机的飞行控制系统中.该飞行控制计算机由中央处理单元(CPU单元)、模拟量接口单元(AIO单元)、开关量接口单元(DIO单元)和串行通信接口单元(SIO单元)四个部分组成,如图 1所示. CPU单元是飞行控制计算机的核心单元,通过CAN总线接收各接口单元的上行数据,经控制律解算后,将控制指令再下传至各接口单元.各个单元可以互不干扰的完成任务,提高飞行控制系统的工作效率[3].

|
| 图 1 基于CAN总线的飞行控制计算机结构图 Figure 1 Structure diagram of the flight control computer based on the CAN bus |
各功能单元独立工作,通过内部总线进行数据共享与同步,内部总线是各功能单元配合发挥整体效应的关键.样例飞行控制计算机采用CAN总线作为内部总线,负荷率已超过了72%[4],无法满足飞行控制系统的通信需求.
FlexRay作为一种新型的通信总线,具有以下特点:快速性,独立通道的传输速率可以达到10 Mb/s;确定性,采用时分多址机制,在确定的时间片内传输确定的消息,接收端可提前获知相应数据的传输时间;灵活性,支持总线型、星形和混合型多种网络拓扑结构,可根据实际需要选择双通道或者单通道进行数据传输,两个通道的数据传输互不影响;容错能力,FlexRay标准通信协议提供了用户可灵活配置的容错协议[5]. FlexRay总线与CAN总线的性能对比如表 1所示.
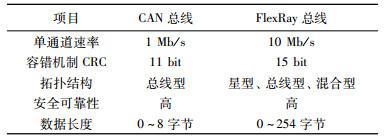
FlexRay总线的传输速率是CAN总线的10倍,单个数据帧传递的最大有效字节数也远大于CAN总线,符合分布式飞行控制计算机总线型的总线拓扑结构要求,同时可以达到提高总线通信速率、降低飞行控制计算机内部总线负荷的目标.为了进一步提高总线通信可靠性,本文采用FlexRay总线[6]替换CAN总线[7],以总线型拓扑结构搭建分布式飞行控制计算机,设计了4通道FlexRay总线的冗余方案,并展开了4通道FlexRay总线通信和余度管理[8-9]的研究.
2 FlexRay冗余方案 2.1 冗余方案飞行控制计算机设计了4路FlexRay总线通道,由于FlexRay总线支持单/双通道的高速率传输且支持半双工/全双工两种数据传输模式[10].根据FlexRay的特性详细设计了如下3种总线冗余方案.
(1) 双余度(“2+2”)方案
4路FlexRay通道分别为主上行通道、主下行通道、备份上行通道和备份下行通道.采用FlexRay总线双余度方案的飞行控制计算机系统结构如图 2所示.每个通道的数据传输方向固定,当主通道故障时切换至备份通道,以保证总线正常通信.若主通道和备份通道同时故障,则内部通信异常,飞行控制计算机终止工作.

|
| 图 2 FlexRay总线双余度方案 Figure 2 Dual-redundancy scheme of the FlexRay bus |
(2) 四余度(“1+3”)方案
4路FlexRay通道的软硬件配置相同且优先级固定,采用1路FlexRay总线通道作为主通道,优先级最高,其余3路通道作为备份通道.当通道发生故障时,隔离故障通道并按照优先级切换至备份通道.若故障通道修复,则将其列入备份总线通道,优先级与故障前相同.基于FlexRay总线4余度方案的飞行控制计算机内部总线结构图如图 3所示.

|
| 图 3 FlexRay总线4余度方案 Figure 3 Four-redundancy scheme of the FlexRay bus |
(3) 多余度(“1+1+2”)方案
将其中的2路FlexRay通道分别作为主上行通道和主下行通道,以双通道模式工作;另外2路通道随机备份,但不指定总线的备份方式.基于FlexRay总线多余度方案的飞行控制计算机内部结构图如图 4所示.若主上行通道或主下行通道故障,将备份通道作为备份上行通道或备份下行通道使用.只要总线通道数大于等于2,则使用2条总线采用双通道方式进行通信.若总线资源仅有一路通道剩余,则将总线模式切换为单通道模式,以降低总线通信速率、增加总线负载为代价,保证飞行控制计算机内部总线仍可以正常通信,最大限度地保证飞行系统的安全性能要求.

|
| 图 4 FlexRay总线多余度方案 Figure 4 Multi-redundancy scheme of the FlexRay bus |
从传输速率、总线负载和可靠性三个角度比较上述3种FlexRay总线冗余方案. “2+2”方案和“2+1+1”方案FlexRay总线通信速率为20 MHz,“1+3”方案总线通信速率为10 MHz,传输速率而言,3种方案应用于飞行控制计算机都具有明显优势.按照FlexRay总线通信协议[11],当以10 MHz的速率单通道通信时,飞行控制计算机内总线负载大幅降低,仅为13.82%,以20 MHz的速率双通道通信,则进一步降低FlexRay总线负载,因此3种方案都满足飞行控制计算机总线通信负载率小于20%的设计要求[12]. 3种方案的可靠性分析:引入系统可靠性参数R(t),表示系统在[0,t]时间范围内正常运行的概率[13].在4余度FlexRay总线系统中,假设一路FlexRay总线通道的可靠度为R(t)=e-λt,其中,常值λ为FlexRay总线故障率,单位为失效数/小时.根据故障概率统计和设计经验,λ为2×10-5/h.在总线故障不修复的前提下,“2+2”方案只能实现一次总线切换,可靠度为R1(t)=1-(1-R(t))2. “2+1+1”方案当一路FlexRay总线故障时,可以有两种总线切换方式,因此总线可靠度为R2(t)=1-(1-R(t))3.同理,“1+3”方案的总线可靠度为R3(t)=1-(1-R(t))4. 3种方案的可靠性如图 5所示.

|
| 图 5 3种方案的可靠度曲线图 Figure 5 The graph of reliability of the three schemes |
由图 5可知,对于长航时的无人机[14]而言,“1+3”方案的可靠性最高,飞行1 000 h后的可靠度为99.4%. “1+1+2”方案继承了“2+2”方案的高传输速率的优势,可灵活配置总线通信模式,最大限度地利用系统可用资源,但这种方案的实现逻辑复杂,而且当系统只有一条总线处于正常状态时,需要将总线的通信方式切换为单通道模式,而FlexRay模式的切换必须对FlexRay的协议参数重新配置(见文[22]),因此需重新对FlexRay模块进行初始化与启动,这一步骤会导致总线数据丢失,及总线切换占用较长时间等问题,难以满足实时性通信需求.综合上述3方面的分析可知,“1+3”方案综合性能最优,因此采用其作为飞行控制计算机内部总线的冗余方案.
3 故障检测 3.1 故障抽象根据“1+3”方案的飞行控制计算机原理样机结构,将各功能单元和4路FlexRay总线抽象为总线节点的集合,功能单元分别对应于标识A~D,总线通道分别对应于标号1~4,即中央处理单元与FlexRay主通道的连接抽象为节点A1,与FlexRay备份通道的连接抽象为节点A2~A4.类似地,串行通信接口单元、模拟量接口单元和开关量接口单元与总线的连接分别抽象为B1~B4节点,C1~C4节点,D1~D4节点,功能单元与总线的节点抽象如图 6所示.

|
| 图 6 节点抽象示意图 Figure 6 The diagram of the nodes by abstracting |
根据节点抽象的设计思想[15],采用FlexRay总线的故障检测机制,进行故障定位.若系统电源、处理器、软件等故障[16]引起功能单元失效,则逻辑抽象为对应的4个FlexRay总线节点故障,无法进行通信;如中央处理单元故障,则表现为A1~A4节点故障.反之,A1~A4节点故障则可以判定中央处理单元出现故障.若总线电缆或节点硬件故障引起FlexRay通道链路故障,表现为对应的Ax、Bx、Cx和Dx节点故障;反之,若Ax、Bx、Cx和Dx节点故障则可以判定总线通道故障.由于通信接口单元具备独立的处理器,可以通过自检实现自身的故障检测与诊断、逻辑切换与故障恢复.因此在故障抽象的基础上,通过自检测和互检测两种方式,保证系统故障源定位的准确性.
3.2 FlexRay通信机制FlexRay通信是严格基于时间的,以通信周期为基本单位,无限循环进行通信.通信周期包括静态段、动态段、符号窗口及网络空闲时间四个部分[10],如图 7所示.其中,静态段由固定时间长度的静态时隙构成,具有时间和数据的确定性优点,即不同FlexRay节点的数据帧占用不同的静态时隙,当时间片轮转至某一静态时隙时,对应节点可完成总线信息传递的任务.因此,采用静态段实现FlexRay总线通信,符合多类型、大数据量的飞行控制计算机内部数据传输的确定性要求.

|
| 图 7 FlexRay通信周期 Figure 7 FlexRay communication cycle |
统计飞行控制计算机总线交互的数据流,如表 2所示,可知数据类型共24种,其中上行数据17种,下行数据7种.飞行控制计算机内部总线通信各类型数据更新频率主要有4种:20 Hz、25 Hz、50 Hz、100 Hz.
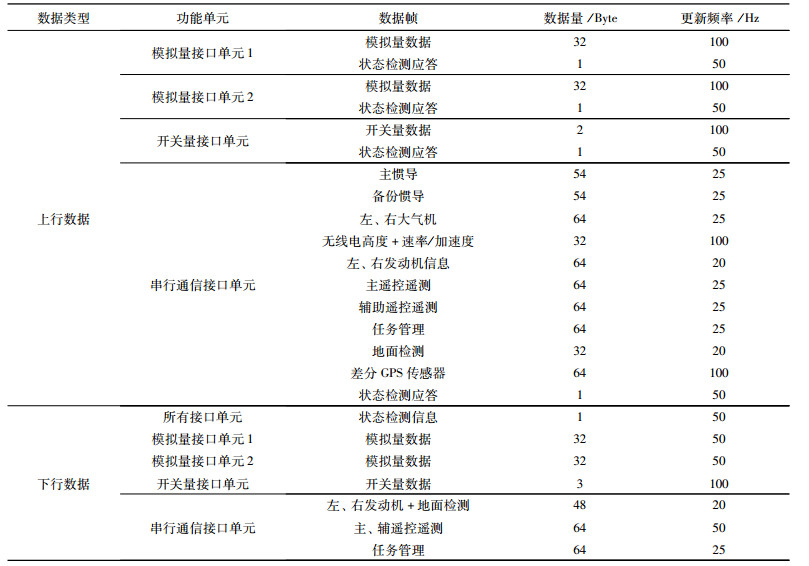
由于飞行控制的解算周期为100 Hz,内部FlexRay总线的通信周期必须是4种数据类型更新周期的公约数,才能达到数据实时性的要求.但是总线通信周期过小,易发生总线频繁传输某些数据,导致CPU的占用率提高,根据实际应用情况,综合考虑这两点,FlexRay通信周期设置为10 ms最佳.
根据表 2中FlexRay通信数据种类,配置了30个FlexRay静态时隙;而同一类型的数据流最大为64 Byte,为保证同一类型的数据能够完整传输,配置FlexRay负载段长度为64 Byte,以10 Mb/s的传输速率计算,发送一个完整数据帧需57.6 μs[10],为了兼容日后飞行数据的增加,数据传输时间留有一定的余量,配置静态时隙为200 μs. FlexRay通信时间调度和时隙分配如图 8所示.

|
| 图 8 FlexRay时间调度与时隙分配图 Figure 8 The FlexRay slot allocation and the scheduling graph |
在FlexRay单个通信周期中,静态段30个静态时隙的分配情况如下:静态时隙1~5,用于飞行控制计算机内部的状态检测;静态时隙6~7,模拟量接口单元将接收的模拟量数据帧上传至中央处理单元;静态时隙8~9则用于实现中央处理单元下传模拟量数据至模拟量接口单元的任务;类似的,静态时隙10和静态时隙11分别用于完成开关量的数据上行和数据上行的任务调度.静态时隙12~21分别用于串行通信接口单元向中央处理单元上行数据的传输,对应10种上行数据帧.静态时隙22~24分别用于传输串行通信接口单元3种下行数据帧.剩余静态时隙25~30则作为备份,为内部数据扩展留有余量.
3.3 故障检测机制FlexRay通信协议设计静态时隙1~5用来检测FlexRay总线工作状态,实现4通道FlexRay总线余度管理. FlexRay总线故障检测基于“请求/应答”机制[17-18],如图 9所示,即中央处理单元作为FlexRay通信网络中的主单元,在静态时隙1发送状态检测帧,并开始周期计数,其余通信接口单元在该时隙接收,若接收成功则返回状态检测返回帧,中央处理单元收到状态检测返回帧后,清除对应通信接口单元的周期计数.以2个FlexRay通信周期(20 ms)作为计数阈值,若时间阈值内均未接收到状态检测返回帧,则判定该通信接口单元与中央处理单元节点连接故障.当4个功能单元节点同时均判定为故障时,则认为总线通道故障,切换至备份总线通道进行数据传输.只有一个单元节点发生故障,则相应功能单元进行自检测并切换至备份节点,检测周期与通信周期相同为10 ms,当该功能单元的所有备份节点均故障时,判定为功能单元故障,切换至备份功能单元工作.

|
| 图 9 FlexRay总线故障检测机制 Figure 9 The mechanism of the FlexRay bus fault detection |
由于FlexRay总线通信是基于通信周期,且遵循严格的时间同步.在每个通信周期静态时隙1,检测节点在发送状态检测帧,而被检测节点在静态时隙2返回状态检测应答帧.在分布式飞行控制系统中对每个FlexRay节点都设有故障阈值,故障阈值表示节点的可用性,通过节点故障权值与阈值比较来判断节点状态.若节点故障权值大于阈值,则判定为节点故障.
故障权值函数f,函数输入为t,表示功能单元节点应答的间隔时间.分析故障检测的统计数据,应答间隔时间符合正态分布:
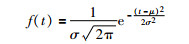
|
(1) |
则接收到应答信号的概率是:

|
(2) |
则在[t,+∞]接收不到应答信号的概率:

|
(3) |
其中,0 < P < 1.故障权值函数为

|
(4) |
其中,μ表示接收应答延时时间平均值;σ表示接收延时时间方差;t0表示判定节点故障的时刻;Δt表示接收应答的延时时间;φ(t0)为节点的故障权值函数,随时间增长而增大,故障权值越大,当大于故障阈值时,则判定被检测节点故障.
根据FlexRay时间调度设计,以10 Mb/s的速率传输一个有效数据长度为64字节的FlexRay完整数据帧耗时57.6 μs,根据故障检测统计数据,检测节点接收应答的时间延时均值μ为57.6 μs,方差σ为6.由式(2) 对总线故障检测机制进行评估,如图 10所示.

|
| 图 10 FlexRay总线故障检测评估 Figure 10 The evaluation of the fault detection on the FlexRay bus |
由此可知,当故障检测应答时间为70 μs时,故障检测成功率达97%,很大程度上能在静态时隙2的200 μs时间片内成功检测出故障,因此φ(70)=3.94表示节点的故障阈值,如图 11所示.当φ(t0) > φ(70) 时,表示节点故障的可能性大于阈值,判定为节点故障.以上故障检测的评估是基于单通信周期内的故障权值评估,而节点的故障处理需在两个通信周期均认为节点故障后才进行故障判定,因此故障检测的准确度将进一步提高.

|
| 图 11 FlexRay总线故障权值 Figure 11 Fault weight value on the FlexRay bus |
基于“请求/应答”的故障检测机制采用故障权值算法对故障进行裁决和判定,不仅可以及时判断出总线型FlexRay通信网络下的某一节点的故障状态,保障检测效率,还能有效地避免因通信网络原因引起的延时和数据丢失问题.通过采用这种快速、准确的故障检测方法对节点的故障与否进行判定,及时定位故障源,为下一步故障处理提供依据.
4 逻辑切换与系统重构对于基于4路FlexRay总线的飞行控制计算机,故障诊断和切换逻辑是实现余度管理的核心[19].采用故障检测机制定位故障后,对故障准确判定并及时处理,可以减小故障对系统的影响,而完备的切换逻辑则是实现系统重构的关键,对于飞行控制计算机而言,逻辑切换需充分利用系统备份总线完成系统内部总线通信[20],以达到飞行控制计算机的功能与性能需求.
4.1 切换逻辑采用“1+3”总线冗余方案,以中央处理单元为主导进行总线状态检测.当判定节点出现故障时,不仅要完成切换逻辑避免对系统功能造成影响,还需记录当前故障状态,为系统监控台提供参考信息.故障信息包括故障与否(Y/N)、次数(0~2) 及类型(暂态或永久故障)等,为故障处理提供依据.若故障类型为暂态故障且次数小于2,则故障修复后优先级不变,作为备份节点使用;若为永久故障,则放弃使用,按照优先级切换至当前优先级最高的节点.总线节点的故障类型如表 3所示.

以串行通信接口单元节点故障为例,若节点B1经检测为暂态故障节点,则记录当前该节点故障次数为1,故障状态为暂态故障,同时根据备份节点B2~B4的优先级顺序切换至B2节点,使用当前优先级最高的总线节点进行通信.若B2节点发生暂态故障且B1节点故障未恢复,则切换至B3节点,若节点B1故障恢复,则清除相应的故障记录,并切换至当前可用节点中优先级最高的节点,即B1节点.若B1节点故障次数大于1,则记录为永久故障,即便节点故障恢复也不再使用,并将其隔离.以此类推,若B1~B4节点均故障,则判定串行通信接口单元故障,切换至备份单元.切换逻辑如图 12所示.

|
| 图 12 故障判定与切换逻辑 Figure 12 The fault judgement and the switching logic |
飞行控制计算机采用FlexRay总线作为内部通信总线,在硬件上并无实现物理重构的器件,主要采用逻辑重构的方式实现总线故障和节点故障下的总线通道重构,有效处理故障,使系统重新工作.
4路FlexRay总线通道采用热备份冗余方式[21],通过中央处理单元向其它通信接口单元发送状态检测帧进行故障检测,根据通信接口单元的状态检测返回帧,判断系统是否存在故障并定位故障源.若检测出总线节点故障,则按照切换逻辑转接备份节点,若所有通信接口单元节点均无状态反馈信息,表现为A1、B1、C1、D1节点异常,则判定通道链路故障,更换备份通道进行内部通信,如图 13所示.

|
| 图 13 总线节点与链路故障处理 Figure 13 The bus node and the channel failure processing |
当某一功能单元的所有节点均诊断为故障时,如所有Cx节点故障,由此判定对应的模拟量接口单元故障.当诊断出模拟量单元故障时,系统不再使用模拟量接口单元的数据,而是使用其它通信接口单元的备份信数据信息进行控制律解算,此时飞行控制系统与设备模拟量接口的通信暂停,利用存储于中央处理单元的航点进行短时间的自主飞行.同时模拟量接口单元尝试故障恢复,若恢复成功,则模拟量接口单元通信功能恢复,系统重新接收模拟量接口单元的新数据进行控制律解算;若故障无法恢复,为永久性故障,则切换至备份单元,从而保证无人机飞行的安全.单元故障处理逻辑如图 14所示.

|
| 图 14 功能单元故障后系统重构 Figure 14 System reconstruction after the unit failure |
根据样例分布式飞行控制计算机的总体结构,采用中央处理单元、通信接口单元及FlexRay总线搭建飞行控制计算机原理样机,如图 15所示.

|
| 图 15 基于FlexRay总线的飞行控制计算机原理样机 Figure 15 Principle flight control computer on the FlexRay bus |
根据3.2节飞行控制计算机内部数据流量和解算频率(见文[12])配置FlexRay基本通信参数[22],完成FlexRay时间调度及时隙分配,如表 4所示.在此基础上实现FlexRay通信,如图 16所示,利用PC机和示波器实时监测总线和功能单元的运行状态,并验证“1+3”总线方案余度管理的实时、可靠等性能,以保障飞行控制计算机内部通信的安全可靠.


|
| 图 16 测试环境 Figure 16 The testing environment |
FlexRay总线余度管理的测试,主要验证FlexRay总线故障检测与故障处理机制,以确保在总线故障的情况下仍可以进行通过总线的逻辑切换,并实现系统恢复.采用故障模拟的方式将故障注入系统,如总线通道断开.根据FlexRay通信参数配置,进行飞行控制计算机原理样机内部总线通信,正常工作时的总线波形如图 17所示.

|
| 图 17 原理样机FlexRay协议通信总线波形 Figure 17 Waveform of the FlexRay bus in the principle prototype |
飞行控制计算机内包括4路FlexRay总线通道,每个通信周期都进行单元间的状态检测和自检,即检测周期为10 ms,若2个通信周期(20 ms)内中央处理单元没有收到所有节点的状态检测返回帧且节点自检正常,则诊断为通道链路故障;若某一节点自检为故障,则诊断为节点故障,对此完成相应的节点或通道链路的切换.宏观上,这两种故障切换均是总线通道的切换,故障诊断和切换的测试结果如图 18和图 19所示.

|
| 图 18 故障检测时间 Figure 18 The graph of the fault detection time |

|
| 图 19 故障切换时间 Figure 19 The graph of the fault switching time |
由上述测试结果可知,故障检测时间均值为20 ms,故障切换的时间均值为7.2 ms,而系统控制律解算周期为10 ms,因此可以在3个解算周期(30 ms)内完成故障检测与逻辑切换,满足总线余度管理实时性要求.
若总线节点故障,以串行通信接口单元故障为例,总线监测的波形如图 20(a)所示,此时串行通信接口单元无法上传状态检测返回帧和有效的传感器数据至中央处理单元,中央处理单元与串行通信接口单元之间的节点通信发生故障.

|
| 图 20 节点故障与恢复的FlexRay总线波形 Figure 20 The FlexRay node failure and the recovery waveform |
在有限的时间阈值内,对节点故障进行记录,并按优先级切换至备用节点,总线波形如图 20(b)所示,表明当节点故障时,总线故障检测机制正确,可以准确切换至备份节点通信,完成了FlexRay通信网络的正常通信.
若FlexRay通道故障,示波器监测的总线波形如图 21(a)所示,此时FlexRay总线链路损坏,各通信接口单元均无法上传有效数据信息至中央处理单元.按照FlexRay总线余度管理方案,切换至备用总线通道,建立飞行控制计算机原理样机的内部通信网络进行通信.观察FlexRay总线波形,如图 21(b)所示,说明FlexRay通道链路故障时,可以及时采用备份通道重建内部总线通信网络,宏观上对系统不造成任何影响.

|
| 图 21 通道故障与恢复的FlexRay总线波形 Figure 21 The FlexRay channel failure and the recovery waveform |
因此,无论是总线节点故障还是通道故障,FlexRay余度管理都可以及时、准确地诊断出故障,并进行相应的故障记录与处理,实现飞行控制计算机内部FlexRay总线的故障修复与系统重构,验证了FlexRay总线的余度管理方案的可行性和正确性.
5.3 实验结论在实验室环境下,以飞行控制计算机原理样机为测试平台,按照FlexRay通信机制和时间调度,对FlexRay通信与余度管理方案进行验证,结果如表 5和表 6所示.
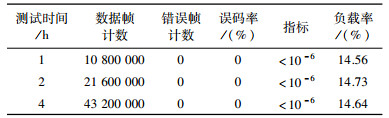

由测试结果可知,FlexRay在通信过程中严格对准时间;经历长时间、大数据量的测试,误码率为0%,通信准确性极高,通信负载率小于20%,相比于CAN总线的72%,传输效率和总线负载得到大幅改善.针对FlexRay总线的网络通信进行余度管理方案的验证,在总线节点或者通道故障的情形下,能够及时进行故障诊断与相应处理,从故障检测到系统恢复的总时间小于3个通信周期(30 ms),符合飞行系统对飞行控制计算机的性能要求.
6 结束语本文针对基于CAN总线的样例飞行控制计算机内部总线通信的问题,设计了4通道FlexRay总线余度管理策略,以提高通信可靠性.测试结果验证了余度管理机制的正确性,可以在30 ms内完成总线故障的判定与切换,实时性满足飞行控制计算机的通信传输需求,基于FlexRay的总线余度管理方案有效改善无人机内部通信的性能,进一步保障了无人机的安全飞行.
| [1] | Ochi Y, Kanai K. Automatic approach and landing for propulsion controlled aircraft[C]//Proceedings of the IEEE International Conference on Control Applications. Piscataway, NJ, USA: IEEE, 1999: 22-27. |
| [2] |
张增安, 陈欣.
一种用于无人机的分布式飞行控制系统设计[J].计算机系统应用, 2010, 19(8): 16–20.
Zhang Z A, Chen X. Design of a distributed flight control system for UAV[J]. Computer Systems and Applications, 2010, 19(8): 16–20. |
| [3] | Zheng L, Chen X, Lü X H. Research on internal communication of redundant flight control computer for UAV[J]. Advanced Materials Research, 2012, 383-390: 1578–1583. |
| [4] | 章勇. 基于FlexRay飞行控制计算机总线设计与研究[D]. 南京: 南京航空航天大学, 2013. Zhang Y. Design and research on FlexRay bus communication for flight control computer[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013. |
| [5] | 孙雨. FlexRay网络通信协议在车载系统中的应用与研究[D]. 长沙: 中南大学, 2014. Sun Y. Application and research of FlexRay network communication protocol in vehicle system[D]. Changsha: Central South University, 2014. |
| [6] |
谢轶群, 李仁发, 王蓉, 等.
基于车用FlexRay网络的应用原型系统[J].计算机工程, 2011, 37(23): 229–231.
Xie Y Q, Lee R F, Wang R, et al. Application prototype system based on vehicle FlexRay network[J]. Computer Engineering, 2011, 37(23): 229–231. DOI:10.3969/j.issn.1000-3428.2011.23.078 |
| [7] |
邓婕.
CAN总线通信原理分析[J].电子设计工程, 2012, 20(7): 104–107.
Deng J. Analysis of CAN bus communication principle[J]. Electronic Design Engineering, 2012, 20(7): 104–107. |
| [8] |
徐金全, 郭宏, 张秦岭, 等.
基于余度和容错技术的高可靠机载智能配电系统设计[J].航空学报, 2011, 32(11): 2117–2123.
Xu J Q, Guo H, Zhang Q L, et al. Design of intelligent airborne power distribution systems with high reliability based on redundancy and fault-tolerant technology[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(11): 2117–2123. |
| [9] | Alstrom K, Torin J. Future architecture for flight control systems[C]//2001 Digital Avionics Systems Conference. Piscataway, NJ, USA: IEEE, 2001: 1B5/1-1B5/10. |
| [10] |
王锴, 王宏, 徐皑冬.
下一代车载网络FlexRay及其应用研究[J].计算机工程应用, 2008, 44(20): 77–79.
Wang K, Wang H, Xu A D. Research of next generation in-vehicle network FlexRay and its application[J]. Computer Engineering and Applications, 2008, 44(20): 77–79. |
| [11] | FlexRay Consortium. FlexRay communications system protocol specification, version 2.1, revision A[EB/OL]. (2005-12-19)[2016-02-18]. http://www.flexray.com. |
| [12] | 张煜. 基于MPC8280的飞行控制计算机CPU单元设计[D]. 南京: 南京航空航天大学, 2014. Zhang Y. CPU unit design of flight control computer based on MPC8280[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014. |
| [13] |
袁由光.
容错计算原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 2005: 4-9.
Yuan Y G. The principle of fault tolerant computing[M]. Harbin: Harbin Engineering University Press, 2005: 4-9. |
| [14] |
中国航空信息中心《世界飞机手册》编写组.
世界飞机手册[M]. 北京: 航空工业出版社, 2001: 5-10.
Editing Group of World Aircraft Handbook in Chinese Aviation Information Center. World aircraft handbook[M]. Beijing: Aviation Industry Press, 2001: 5-10. |
| [15] |
张志文, 陈欣, 吕迅竑.
一种分布式结构飞行控制计算机内部总线节点设计[J].电子技术应用, 2011, 37(11): 40–43.
Zhang Z W, Chen X, Lü X H. The design of internal bus communication node of a distributed flight control computer[J]. Application of Electronic Technique, 2011, 37(11): 40–43. DOI:10.3969/j.issn.0258-7998.2011.11.018 |
| [16] |
孙峻朝, 杨孝宗.
一个多机容错系统MPFTS故障恢复的设计与实现[J].计算机应用与软件, 2001, 18(10): 4–6.
Sun J C, Yang X Z. Design and implementation of the fault recovery of a multi-processor fault tolerant system MPFTS[J]. Computer Applications and Software, 2001, 18(10): 4–6. DOI:10.3969/j.issn.1000-386X.2001.10.002 |
| [17] |
邹见效, 张正迁, 徐红兵.
三重化冗余多机系统心跳检测机制研究[J].电子科技大学学报, 2010, 39(3): 379–383.
Zou J X, Zhang Z Q, Xu H B. Study on the heartbeat mechanism for triple modular redundant multi-machine system[J]. Journal of University of Electronic Science and Technology of China, 2010, 39(3): 379–383. |
| [18] |
张水平, 李有峰, 童样, 等.
云数据中心心跳检测与故障评估[J].计算机工程与设计, 2014, 35(10): 3386–3391.
Zhang S P, Li Y F, Tong Y, et al. Heartbeat detection and fault assessment for cloud data center[J]. Computer Engineering and Design, 2014, 35(10): 3386–3391. DOI:10.3969/j.issn.1000-7024.2014.10.009 |
| [19] | 杜董生. 切换系统的故障诊断与容错控制研究[D]. 南京: 南京航空航天大学, 2012. Du D S. Study of fault diagnosis and fault tolerant control for switched system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2012. |
| [20] |
陈静波, 胡金春.
基于CAN总线的分布式容错系统实现[J].清华大学学报:自然科学版, 2009, 49(7): 1007–1011.
Chen J B, Hu J C. Distributed fault-tolerant system based on CAN bus[J]. Journal of Tsinghua University: Science and Technology, 2009, 49(7): 1007–1011. |
| [21] | 郑雷. 无人机余度飞行控制计算机设计及研究[D]. 南京: 南京航空航天大学, 2011. Zheng L. Design and reseach on redundant flight control computer for UAV[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011. |
| [22] |
吴宝新, 郭永红, 曹毅, 等.
汽车FlexRay总线系统开发实战[M]. 北京: 电子工业出版社, 2012: 52-124.
Wu B X, Guo Y H, Cao Y. Development of automotive FlexRay bus system[M]. Beijing: Publishing House of Electronics Industry, 2012: 52-124. |