



1 引言
稳定平台是一种典型的高精度视轴稳定伺服系统[1],可以隔离载体扰动,不断测量平台姿态和位置的变化,精确保持动态姿态基准,通过图像探测设备实现对目标的跟踪.理论上不应受到其它因素影响.但在实际应用中,光学传感器视轴受载体振动及稳定平台自身各种扰动的影响,使视轴偏移和抖动,若视轴稳定精度达不到要求将直接导致图像震颤、不清晰,严重时目标脱离视场,从而丢失目标[2].由此可见,视轴稳定精度决定了整个系统性能的好坏,同时也是衡量稳定平台性能的一项关键指标.如何保证视轴稳定是稳定平台伺服控制系统研究中的关键问题[3].
具有通用和实用特性的扩张状态观测器作为韩京清教授提出的自抗扰控制器[4]的中心环节,以其特有的优势被广泛应用于各个领域中[5-6].相关研究表明[7-8],将非线性增益引入扩张状态观测器中,是一种提高跟踪精度和误差收敛速度的较为实用的设计思路,可以用非线性扩张状态观测器对扰动进行估计.滑模变结构控制具有快速切换特性和对干扰信号的强鲁棒性等优点[9].有限时间理论是近年来系统与控制领域发展较为迅速的理论之一.系统有限时间收敛是指受控系统状态在有限时间内到达系统的平衡点,实现系统有限时间稳定[10].目前,对控制系统的有限时间稳定性的研究很受关注[11-17].本文针对扩张状态观测器对快变干扰存在估计不足的问题,提出了复合干扰补偿的设计思想.
加性分解理论[18]是一种模型分解的新形式,它可以有效地分离系统的控制任务.加性分解原理可用于风力机变桨控制系统中[19],将风力发电机组变桨控制问题分解为主系统的追踪及辅系统的镇定问题.将复杂的原始系统分解为2个简单的问题.文[20]采用加性分解理论解决了小型固定翼无人机跟踪控制器的设计问题.光电跟踪系统是一个典型的伺服系统,其控制任务可分为:视轴的稳定控制和视轴的跟踪控制.本文将采用加性分解理论对稳定平台伺服系统进行分解,分离系统的控制任务,将视轴跟踪控制和稳定控制分别在主系统和辅系统内完成,从而实现对运动目标的高精度跟踪.
2 基于加性分解的系统模型分析稳定平台伺服系统主要由直流力矩电机、功率放大器、编码器、平台框架及安装在框架上的光学系统等组件组成.一般来说,电机电枢、电感的粘性阻尼都非常小,可以近似为零,则稳定平台的机电系统的动态模型可以描述为

|
(1) |
其中,J是系统转动惯量,B是阻尼系数,x(t)表示电机的转角,u(t)是控制输出,dext(t)表示外部干扰.稳定平台系统的状态方程可以表示为
|
(2) |
其中,



将式(2) 整理为

|
(3) |
其中,deq(t)为等效输入干扰.式(3) 中Bdeq(t)的具体表示形式为

|
(4) |
采用加性分解原理可以把稳定平台系统分解成为主系统与辅系统两个子系统的状态之和,即x(t)=xp(t)+xs(t).其中xp(t)为主系统状态变量,xs(t)为辅系统状态变量.
选择主系统:
|
(5) |
其中,

|
(6) |
其中,Jn、Bn分别定义为系统的名义模型的转动惯量和阻尼系数.
将原系统与主系统相减,可以求得辅系统:
|
(7) |
定义

|
(8) |
其中,


|
(9) |
其动态方程可表述为

|
(10) |
其中,
依据加性分解对稳定平台系统进行分解,可将系统分解为主系统和辅系统两个子系统,这样可以将系统稳定控制和跟踪控制分别考虑,主系统负责实现跟踪控制,辅系统负责实现稳定控制.
3 基于加性分解的复合控制策略为了实现视轴的精确跟踪,从系统加速度角度出发,针对主系统模型设计基于加速度的PD控制器up(t)=uPD(t).辅系统为了完成视轴的稳定控制,采用复合干扰补偿策略,控制器由NESO和滑模补偿器组成.采用NESO估计出系统等效干扰,并在控制量中引入等量补偿,从而实现动态补偿线性化.针对干扰的未估计状态,结合有限时间收敛理论设计基于有限时间收敛的滑模补偿器u1(t),对干扰的未估计状态进行有效地补偿,以进一步提高系统的跟踪性能.系统控制结构如图 1所示,其中,r(t)是给定信号,xp(t)是主系统的输出,x(t)是实际系统的输出,uPD是比例—微分(PD)控制器输出控制量,u1(t)是补偿器输出控制量,


|
| 图 1 控制结构图 Figure 1 The diagram of the control structure |
ESO比常用的状态观测器高一阶,它将未知扰动扩张为一个新的状态,实现了对状态和扰动的估计.将非线性增益引入扩张状态观测器中,可以大幅度地提高估计精度及误差收敛速度,本文利用ESO的思想设计非线性扩张状态观测器以实现对未知扰动的估计,并在控制量中引入等量补偿,从而实现动态补偿线性化.
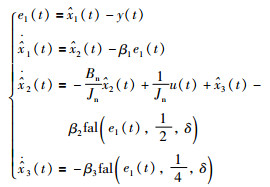
针对稳定平台系统(3) 设计NESO为
|
(11) |
其中,



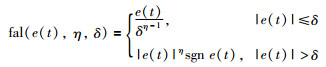
|
(12) |
其中,0 < η < 1,δ为线性段的区间长度.该函数具有小误差、大增益,大误差、小增益的调节特性,可以随着误差的变化自动调节增益.
等效输入干扰的估计值为
|
(13) |
两个系统的误差系统为
|
(14) |
其中,


|
(15) |
只要β3的取值大于ω的取值,这些估计误差就都会足够小.参考NESO选择的参数可知,该NESO能实现对状态估计值
关于扩张状态观测器的参数调整问题,通过大量数字仿真实验表明,扩张状态观测器的参数对对象阶次有很好的“继承性”.即用于2阶对象的一组参数仍可用于2阶以上对象的观测器上.
从 


扩张状态观测器可以补偿系统的慢干扰,但对于突变干扰会出现估计不足的情况,无法对其进行有效补偿.针对上述问题,本文结合有限时间收敛理论及滑模控制技术设计了补偿器,使扰动得到进一步的补偿,从而使稳定平台系统达到较高的跟踪精度.
4.2.1 有限时间收敛的概念考虑如下系统:

|
(16) |
其中,f:U0×R→Rn在U0×R连续,U0是原点x=0的一个开邻域,对于所考虑的系统(16),基于非线性控制系统有限时间稳定性理论有如下引理:
引理[22] 考虑非线性系统(16),假设存在一个定义在原点的邻域


|
(17) |
其中,x0是原点某一开邻域中的任意一点.如果

选取滑模面函数为

|
(18) |
其中
补偿器u1(t)采用形式:

|
(19) |
其中,k1、k2、k3、r为正常数,k2 > |ΔM|.
定理 对于系统(2) 采用加性分解,将其分解为主系统(5) 和辅系统(9) 两个子系统,采用NESO估计等效输入干扰,补偿器采用式(19) 的形式,则:
(1) 滑模面(18) 在有限时间内收敛到0.
(2) 辅系统状态变量xs(t)指数收敛到0,即

证明 选择李亚普诺夫函数:

|
则:
|
(20) |
由于k2 > |ΔM|,则:

|
根据引理可知,V在有限时间t0内收敛到0,即:
|
(21) |
其中,s0为滑模面的初始值.因此,滑模面在有限时间t0内也收敛到0,同时xs1(t)指数收敛到0,辅系统状态变量xs(t)也指数收敛至0,即

为减小抖振,在切换面附近引入一个薄边界层,即采用如式(22) 所示的连续饱和函数来代替控制量中的不连续的符号函数sgn s:
|
(22) |
光电跟踪伺服系统的控制要考虑伺服电机的驱动力和电机转角位置的关系,位置的2阶导数就是加速度,驱动力与加速度有直接关系,因此可以将控制目标从加速度层面上进行控制.针对主系统的加速度设计控制律为

|
(23) |
其中,

|
(24) |
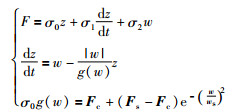
为验证基于加性分解(additive decomposition,AD)的复合控制方法的有效性,本文对某型号光电稳定平台内框进行了仿真实验.系统给定的位置参考信号为0.5sin(0.1πt).考虑到模型的不确定性和外界干扰因素,在仿真系统中加入0.2sin(10πt)的干扰信号,同时为更好地模拟实际环境,加入标准差为1×10-2的随机白噪声,系统仿真采样时间为0.001 s,在仿真中该系统摩擦采用LuGre摩擦模型.摩擦力矩F表示为
|
其中,z表示鬃毛的平均变形量,非线性函数g(w) > 0表示不同的摩擦效应,Fc表示Coulomb摩擦力矩,Fs表示最大静摩擦力矩,ws表示Stribeck速度,σ0表示鬃毛刚度系数,σ1表示鬃毛阻尼系数,σ2表示粘性摩擦系数. LuGre摩擦模型参数σ0=260,σ1=2.5,σ2=0.02,Fc=0.28,Fs=0.34,ws=0.01. PD控制器的设计参数:比例系数Kp=14 000,微分系数Kd=50.补偿器采用如下参数:k1=0.01,k2=0.001,k3=0.001,r=0.1,c=50.
非线性扩张状态观测器NESO参数为,


稳定平台模型参数:

为验证基于AD的复合控制方法的有效性,将仿真结果与基于加速度的PD控制方法及PID+NESO控制方法的仿真结果进行比较,如图 2所示.从仿真结果中可以看出,稳定平台伺服系统采用本文所提方法可以实现对扰动的进一步补偿,具有较强的鲁棒性,跟踪误差从0.8×10-3°减小到1.5×10-4°.当进行低频跟踪时具有良好的跟踪精度.

|
| 图 2 指令为0.5sin(0.1πt)的仿真结果 Figure 2 The simulation results for the 0.5sin(0.1πt) instruction |
为进一步验证基于AD的复合控制方法的有效性,将系统的给定参考信号变为0.5sin(20πt).其仿真结果如图 3所示.

|
| 图 3 指令为0.5sin(20πt)的仿真结果 Figure 3 The simulation results for the 0.5sin(20πt) instruction |
从上述仿真结果中可以看出,本文所提方法能有效的抑制摩擦等扰动信号对系统性能的不良影响,有效地缓解了滑模控制中的抖振现象.跟踪误差从1.5×10-3°减小到1×10-3°,跟踪效果良好.
7 结论本文运用加性分解原理,分离系统控制任务,将视轴跟踪控制和稳定控制分别在主系统和辅系统内完成.该方法在保证系统稳定的基础上,可以提高对运动目标的跟踪精度以及系统的动态品质.本文所提的复合干扰补偿方法将干扰补偿问题提升到了精细干扰的思想层面上.通过仿真,验证了本文所提方法在保证系统跟踪精度的同时,大大地提高了系统的鲁棒性.该方法具有一定的工程实用价值.
| [1] |
任彦, 刘正华.
滑模自适应控制在光电稳定平台中的应用[J].控制工程, 2014, 21(1): 32–36, 40.
Ren Y, Liu Z H. Application of sliding adaptive control in opto-electronic stabilized platform[J]. Control Engineering of China, 2014, 21(1): 32–36, 40. |
| [2] | 李贤涛. 航空光电稳定平台扰动抑制技术的研究[D]. 北京: 中国科学院大学, 2014. Li X T. Aerial photoelectric stabilized platform disturbance rejection technology research[D]. Beijing: University of Chinese Academy of Sciences, 2014. |
| [3] | 岳振力. 光电稳定平台控制系统的设计和研究[D]. 山西: 中北大学, 2015. Yue Z L. The control system of the photoelectric stabilized platform design and research[D]. Shanxi: University of North, 2015. |
| [4] |
韩京清.
自抗扰控制技术[M]. 1版. 北京: 国防工业出版社, 2008: 183-242.
Han J Q. Active disturbance rejection control technique[M]. 1st ed. Beijing: National Defence Industry Press, 2008: 183-242. |
| [5] |
孙立, 董君伊, 李东海, 等.
基于扩张状态观测器的汽轮机功频电液串级控制[J].工程学报, 2015, 35(7): 1697–1703.
Sun L, Dong J Y, Li D H, et al. Cascaded load-frequency digital electric-hydraulic regulation of turbine via extended state observer[J]. Proceedings of the CSEE, 2015, 35(7): 1697–1703. |
| [6] |
文定都.
ADRC串级控制在电加热炉温度控制中的应用研究[J].仪表技术与传感器, 2015(6): 59–62.
Wen D D. Applied research of ADRC cascade control in temperature control system of electric furnace[J]. Instrument Technique and Sensor, 2015(6): 59–62. |
| [7] |
王海强, 黄海.
扩张状态观测器的性能与应用[J].控制与决策, 2013, 28(7): 1078–1082.
Wang H Q, Huang H. Property and applications of extended state observer[J]. Control and Decision, 2013, 28(7): 1078–1082. |
| [8] |
郑颖, 马大为, 姚建勇, 等.
转台伺服系统扰动估计与补偿控制[J].机床与液压, 2015, 43(7): 43–45.
Zheng Y, Ma D W, Yao J Y, et al. Disturbance estimation and compensation control for turntable servo system[J]. Machine tool and Hydraulics, 2015, 43(7): 43–45. |
| [9] |
刘金琨.
滑模变结构控制MATLAB仿真[M]. 2版. 北京: 清华大学出版社, 2012: 58-60.
Liu J K. The sliding mode variable structure control MATLAB simulation[M]. 2nd ed. Beijing: Tsinghua University Press, 2012: 58-60. |
| [10] |
高计委, 蔡远利.
航天器姿态稳定的自适应有限时间控制[J].固体火箭技术, 2016, 39(2): 275–280.
Gao J W, Cai Y L. Adaptive finite-time control for spacecraft attitude stabilization[J]. Journal of Solid Rocket Technology, 2016, 39(2): 275–280. |
| [11] |
张秀华, 徐炳林, 赵宇.
有限时间收敛的Terminal滑模控制设计[J].控制工程, 2008, 15(6): 637–639, 691.
Zhang X H, Xu B L, Zhao Y. Terminal sliding mode control design with finite-time convergence[J]. Control Engineering of China, 2008, 15(6): 637–639, 691. |
| [12] |
王世峰, 赵党军.
基于有限时间收敛ESO的四旋翼无人机控制[J].中南大学学报, 2015, 46(7): 2494–2503.
Wang S F, Zhao D J. Quad-rotor vehicle control based on finite-time convergent ESO[J]. Journal of Central South University, 2015, 46(7): 2494–2503. DOI:10.11817/j.issn.1672-7207.2015.07.016 |
| [13] |
张鹏, 黄胜波, 王琪, 等.
基于有限时间收敛观测器的汽车质心侧偏角估计[J].机械设计, 2014, 31(7): 109–112.
Zhang P, Huang S B, Wang Q, et al. Scheme for estimation of vehicle sideslip angle based on finite time convergent observer[J]. Journal of Machine Design, 2014, 31(7): 109–112. |
| [14] |
赵海斌, 李伶, 孙胜.
基于模糊控制的有限时间收敛制导律[J].航天控制, 2014, 32(3): 33–37.
Zhao H B, Li L, Sun S. Guidance law with finite time convergence based on fuzzy logic[J]. Aerospace Control, 2014, 32(3): 33–37. |
| [15] |
黄国勇, 姜长生, 王玉惠, 等.
新型有限时间收敛滑模扩张状态观测器研究[J].信息与控制, 2008, 37(1): 63–67.
Huang G Y, Jiang C S, Wang Y H, et al. On a novel sliding mode extended state observer with finite time convergence[J]. Information and Control, 2008, 37(1): 63–67. |
| [16] |
李鹏, 郑志强, 马建军.
一类不确定非线性系统的全局鲁棒有限时间镇定[J].控制理论与应用, 2011, 28(7): 915–920.
Li P, Zheng Z Q, Ma J J. Global robust finite time stabilization of a class of nonlinear uncertain systems[J]. Control Theory & Applications, 2011, 28(7): 915–920. |
| [17] |
沈艳军, 刘万海, 张勇.
一类非线性系统全局有限时间观测器设计[J].控制理论与应用, 2010, 27(5): 668–674.
Shen Y J, Liu W H, Zhang Y. Global finite-time observers for a class of nonlinear systems[J]. Control Theory & Applications, 2010, 27(5): 668–674. |
| [18] | Quan Q, Yang D, Hu H, et al. A new model transformation method and its application to extending a class of stability criteria of neutral type systems[J]. Nonlinear Analysis: Real World Applications, 2010, 11(5): 3752–3762. DOI:10.1016/j.nonrwa.2010.02.005 |
| [19] |
赵薇薇, 张磊, 井延伟.
变桨风力发电机组控制器优化设计[J].电网技术, 2014, 38(12): 3436–3440.
Zhao W W, Zhang L, Jing Y W. Optimization design of controller for pitch wind turbine[J]. Power System Technology, 2014, 38(12): 3436–3440. |
| [20] | Quan Q, Cai K Y, Lin H. Tracking control of a small fixed-wing UAV based on additive-state-decomposition-based dynamic inversion method[C]//33rd Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2014: 3625-3631. |
| [21] |
韩京清.
扩张状态观测器参数与菲波纳奇数列[J].控制工程, 2008, 15(S1): 1–3.
Han J Q. Parameters of the extended state observer and fibonacci sequence[J]. Control Engineering of China, 2008, 15(S1): 1–3. |
| [22] |
张运喜, 孙明玮, 陈增强.
滑模变结构有限时间收敛制导律[J].控制理论与应用, 2012, 29(11): 1413–1418.
Zhang Y X, Sun M W, Chen Z Q. Sliding-mode variable structure finite-time convergence guidance law[J]. Control Theory & Applications, 2012, 29(11): 1413–1418. |