



2. 安徽工程大学机械与汽车工程学院, 安徽 芜湖 241000;
3. 中国科学院合肥智能机械研究所, 安徽 合肥 230031
2. School of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu 241000, China;
3. Institute of Intelligent Machines, Chinese Academy of Sciences, Hefei 230031, China
1 引言
锂离子电池具有工作电压高、效率高、循环寿命长和无污染性等优点,在包括电动汽车等领域得到广泛应用.目前,在锂离子电池管理系统的核心技术之一是电池荷电状态(state of charge,SOC)估计.SOC是表征电池的剩余电量的主要参数,定义为电池剩余电量与额定容量之比[1].准确估计SOC可有效保护电池,提高电池组中各电池单体的利用效率,降低对电池组的容量要求从而提高系统的经济性.SOC估计的传统方法有安时法、开路电压法、经验公式和数学模型估计法、电化学阻抗频谱法和神经网络法等[2-4].扩展卡尔曼滤波(extended Kalman filter,EKF)是应用最为广泛的方法,一直是研究热点[5-8].电池是个复杂的非线性动力系统,温度和荷电状态等条件的改变会造成电池模型参数的变化,传统卡尔曼滤波估计SOC产生较大的误差.交互式多模型(interactive multi-model,IMM)是处理系统参数变化的一种有效方式[9-11],本文将其与EKF结合,形成交互式多模型卡尔曼滤波(IMM-EKF),并应用于锂离子电池SOC参数估计,针对不同条件建立多个模型,采用卡尔曼滤波对各模型进行估计,对各估计结果进行数据交互.
2 锂离子电池的等效模型基于电池的工作原理,用电压源、电容和电阻等电子元件来组成电路以模拟电池的动态特性,即电池模型.其中锂离子电池最常用的是Thevenin模型[12-17],如图 1所示.

|
| 图 1 锂离子电池Thevinen模型 Figure 1 Thevinen model of lithium-ion batteries |
图中,模型中各参数含义为:E是理想电压源,R1为电池内阻,R2是电池的极化电阻,C为电池的极化电容,I为回路电流,U为开路电压.
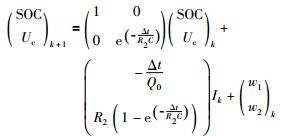
卡尔曼滤波器的公式是基于状态空间模型推导的,故此本文引入锂离子电池的状态空间模型.根据Thevenin模型建立电池系统的离散状态方程为
|
(1) |
式(1) 中:SOC为电池荷电状态,Uc为极化电容电压;电池荷电状态,Q0为电池容量;采样时间Δt;(w1,w2)为系统过程噪声.系统的离散量测方程:

|
(2) |
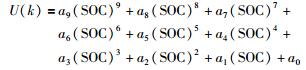
式(2) 中:v为系统量测噪声,f(SOC)为非线性函数.
|
(3) |
其中:a1~a9为常数.
对于锂离子电池模型,尤其是应用在电动汽车环境的电池模型,模型参数并不是固定的,而是随着电池的荷电状态和外界温度而变化.电池内部化学反应的速度和活性物质的迁移率都与温度密切相关,温度对于电池模型参数的影响显著.研究表明,随着温度升高,电池的内阻R1和R2逐渐变小,极化电容C增大[18].
3 交互式多模型扩展卡尔曼滤波器卡尔曼滤波算法估计电池SOC是目前国内外应用比较广的估计方法.该算法是基于模型的算法,对模型精度要求高.考虑到电池在使用过程中反复充放电,引起电池老化、电池内阻增大、容量减小、造成电池模型参数的变化,传统卡尔曼滤波方法估计会产生较大的误差.针对这一情况,国内已有学者提出多模型自适应卡尔曼滤波算法估计电池SOC的方法[17].
本文引入交互式多模型算法(interacting multiple model,IMM)实现电池荷电状态估计,该算法是Magill于1965年提出,其特点是在反复迭代中根据量测误差动态调整各子模型的比例,动态性能优于多模型自适应算法[10].
在IMM的框架中,滤波器组采用扩展卡尔曼滤波EKF[5-8],就得到交互式多模型扩展卡尔曼滤波器,即IMM-EKF,结构如图 2所示.交互式多模型滤波器的原理[9-11]和扩展卡尔曼滤波[5-8]的原理详细介绍见标注参考文献,此处不再展开.

|
| 图 2 交互式多模型EKF滤波器结构 Figure 2 Construction of interactive multi-model EKF |
为验证交互式多模型扩展卡尔曼滤波器在锂离子电池SOC参数估计中的有效性,进行了数值计算仿真和硬件实验,有关参数设置和结果分析如下.
4.1 数值仿真参数设定目前广泛使用锂离子动力电池和镍氢电池[12-17].本文实验采用电池参照文[17],型号LP277099AB,具体参数见表 1.
| 制造厂商 | 天津力神电池股份有限公司 |
| 额定容量 | 11.5 Ah |
| 性质类型 | 磷酸铁锂(LiFePO4) 动力电池 |
| 外形尺寸 | 27×70×112 (mm) |
由于电池在充放电过程中温度和荷电状态发生变化,模型参数发生改变,仿真实验采用Thevinen模型的不同两组参数,获得两个模型.
仿真实验过程中设定两个模型交替出现,持续时间相等.模拟电动汽车行驶过程中的不同路况、速度等带来的动力电池的不同工况,两模型的主要参数见表 2.
设:式(1) 中过程噪声w1和w2的方差阵
设:仿真实验时间200 s,采样时间t=1 s.两模型的初始概率[0.95,0.05].
4.2 比较标准设定为比较交互式多模型扩展卡尔曼滤波器和传统单模型卡尔曼滤波器的滤波性能,设定有关变量和比较标准如下:系统真实状态为x;单模型估计值为x1;多模型估计值为x2;则可记估计相对误差为

|
(4) |
设锂离子电池初始荷电状态SOC=1,首先实施复合脉冲功率仿真实验(hybrid pulse power characterization test,HPPC),电池以2 A恒流放电70 s,静置60 s后又以1 A恒流充电70 s.
图 3中的横坐标为时间,单位s,纵坐标为SOC.波动较小的细线为实际SOC变化曲线.波动很大的细实线是采用EKF的SOC估计曲线.粗实线为IMM-EKF的估计.两种估计的相对误差变化ΔRi如图 4所示.

|
| 图 3 混合脉冲功率特性测试SOC估计 Figure 3 SOC estimation results in hybrid pulse power characterization (HPPC) test |

|
| 图 4 HPPC两个估计误差 Figure 4 Two estimation errors in hybrid pulse power characterization (HPPC) |
图 3、图 4直观表明仿真放电实验中的交互式多模型扩展卡尔曼滤波器相对传统单模型滤波器在估计精度上的明显优势.表 4给出了针对两个相对误差的有关统计定量分析.另外,多模型和单模型在第70 s后和第130 s后时段的估计性能均因为电池状态突变而下降.
| ΔRi | 平均值 | 最大值 |
| EKF | 0.391 1 | 0.147 8 |
| IMM-EKF | 0.246 1 | 0.066 7 |
| 比较 | 0.629 3 | 0.451 1 |
图 5为美国环境保护署EPA制定的城市道路循环工况UDDS(urban dynamometer driving schedule)工况(部分)[19],以一定比例缩小得到本仿真实验放电电流.图 6为电池在这一完全非线性输入情况下的SOC估计.图 7为两个相对估计误差的变化曲线.表 5给出了针对两个相对误差的有关统计定量分析.

|
| 图 5 UDDS工况电流曲线(部分) Figure 5 Current profile of UDDS(part) |

|
| 图 6 UDDS测试的SOC估计 Figure 6 SOC estimation results in UDDS testing |

|
| 图 7 UDDS两个估计误差 Figure 7 Two estimation errors of UDDS |
| ΔRi | 平均值 | 最大值 |
| EKF | 1.309 1 | 0.266 3 |
| IMM-EKF | 0.498 9 | 0.143 1 |
| 比较 | 0.381 1 | 0.537 4 |
从图 6和图 7及表 5均可以得到与前面相同的结论.上述图表均为单次仿真实验,如果采用随机多次实验并进行两个相对误差的统计,仍然可以得到相同结论.具体数据见表 6.
| ΔRi | 平均值 | 最大值 |
| EKF | 0.118 8 | 0.041 6 |
| IMM-EKF | 0.066 6 | 0.019 0 |
| 比较 | 0.560 6 | 0.457 7 |
设锂离子电池初始荷电状态SOC=1,以恒定电流I=1 A进行放电仿真实验.图 8为放电实验原理示意图.采用PI反馈闭环控制稳定放电电流.精密电流输出经A/D转换做为3种算法的输入.将3种算法的计算输出实验数据经数据处理后在Matlab软件中绘制如图 9、10所示.以Ah积分结果为标准,对比EKF和IMM-EKF,结论和前面的数值仿真一致.

|
| 图 8 放电实验原理示意图 Figure 8 Diagram of discharge test |

|
| 图 9 放电实验的SOC估计 Figure 9 SOC estimation results (discharge test) |

|
| 图 10 放电实验的估计误差 Figure 10 Estimation errors in discharge test |
表 7给出针对UKF和IMM-UKF相对误差的有关统计定量分析.
| ΔRi | 平均值 | 最大值 |
| EKF | 0.591 8 | 0.242 6 |
| IMM-EKF | 0.362 1 | 0.089 |
| 比较 | 0.611 8 | 0.366 7 |
交互式多模型扩展卡尔曼滤波器进一步降低了滤波误差.另一方面,计算量增加约35%,考虑微处理器速度不断提高,这一增加是可以接受的[20-22].
5 结论本文将交互式多模型的思想与EKF相结合,形成交互式多模型卡尔曼滤波(IMM-EKF),并应用于锂离子电池SOC参数估计,针对不同条件建立多个模型,采用卡尔曼滤波进行估计,对各估计结果进行数据交互.采用具体型号电池,做了3种不同形式的数值仿真充放电实验,得到IMM-EKF比EKF的估计相对误差均超过50%,证明交互式多模型卡尔曼滤波算法在锂离子电池SOC参数估计中的有效性,计算量增加合理.对锂离子电池SOC参数估计和交互式多模型滤波器的应用均具有实际借鉴意义.
| [1] | Ehsani M, Gao Y, Emadi A. Modern electric, hybrid electric, and fuel cell vehicles:Fundamentals, Theory, and Design[M]. 2nd ed. Boca Raton, FL, USA: Taylor & Francis, 2010: 126-149. |
| [2] | Li X, Jiang J C, Zhang C P, et al. Effects analysis of model parameters uncertainties on battery SOC estimation using H-infinity observer[C]//2014 IEEE 23rd International Symposium on Industrial Electronics. Piscataway, NJ, USA:IEEE, 2014:1647-1653. |
| [3] | Jeong Y M, Cho Y K, Ahn J H, et al. Enhanced coulomb counting method with adaptive SOC reset time for estimating OCV[C]//2014 IEEE Energy Conversion Congress and Exposition. Piscataway, NJ, USA:IEEE, 2014:1313-1318. |
| [4] | Rong Y J, Yang W, Wang H, et al. SOC estimation of electric vehicle based on the establishment of battery management system[C]//2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific. Piscataway, NJ, USA:IEEE, 2014:1-5. |
| [5] | Lin L, Kawarabayashi N, Fukui M, et al. A practical and accurate SOC estimation system for lithium-ion batteries by EKF[C]//2014 IEEE Vehicle Power and Propulsion Conference (VPPC). Piscataway, NJ, USA:IEEE, 2014:1-6. |
| [6] |
王云甘, 王忠锋, 于海斌, 等.
基于MIMO模糊控制的锂离子电池参数自适应等效电路模型及SOC估计[J]. 信息与控制, 2015, 44(3): 263–269.
Wang Y G, Wang Z F, Yu H B, et al. Adaptive parameters equivalent-circuit model of li-ion battery based on MIMO fuzzy control and SOC estimation[J]. Information and Control, 2015, 44(3): 263–269. |
| [7] | Wu T Z, Chen X G, Xia F Z, et al. Research on SOC hybrid estimation algorithm of power battery based on EKF[C]//2011 Asia-Pacific Power and Energy Engineering Conference. Piscataway, NJ, USA:IEEE, 2011:25-28. |
| [8] | Bester J E, Hajjaji A E, Mabwe A M. Modelling of Lithium-ion battery and SOC estimation using simple and extended discrete Kalman filters for aircraft energy management[C]//41st Annual Conference of the IEEE Industrial Electronics Society. Piscataway, NJ, USA:IEEE, 2015:2433-2438. |
| [9] |
戴海峰, 孙泽昌, 魏学哲.
利用双卡尔曼滤波算法估计电动汽车用锂离子动力电池的内部状态[J]. 机械工程学报, 2009, 45(6): 95–101.
Dai H F, Sun Z C, Wei X Z. Estimation of internal states of power lithium-ion batteries used on electric vehicles by dual extended Kalman filter[J]. Journal of Mechanical Engineering, 2009, 45(6): 95–101. |
| [10] | Mabrouk M B, Grivel E, Magnant C, et al. Compensating power amplifier distortion in cognitive radio systems with adaptive interacting multiple model[C]//23rd European Signal Processing Conference. Berlin, Germany:Springer, 2015:1212-1216. |
| [11] | Huang H, Yang R. Helicopter tracking and classification with multiple interacting multiple model estimator with out-of-sequence acoustic and EO measurements[C]//19th International Conference on Information Fusion. Berlin, Germany:Springer, 2016:1132-1139. |
| [12] | Kim T H, Moon K R. Variable-structured interacting multiple model algorithm for the ballistic coefficient estimation of a re-entry ballistic target[J]. International Journal of Automation Control, 2013, 11(6): 1204–1213. DOI:10.1007/s12555-013-0003-2 |
| [13] | Zheng F, Xing Y, Jiang J, et al. Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries[J]. Applied Energy, 2016, 183: 513–525. DOI:10.1016/j.apenergy.2016.09.010 |
| [14] | Zheng F, Jiang J, Sun B, et al. Temperature dependent power capability estimation of lithium-ion batteries for hybrid electric vehicles[J]. Energy, 2016, 113: 64–75. DOI:10.1016/j.energy.2016.06.010 |
| [15] | Sun B, Jiang J, Zheng F, et al. Practical state of health estimation of power batteries based on Delphi method and grey relational grade analysis[J]. Journal of Power Sources, 2015, 282: 146–157. DOI:10.1016/j.jpowsour.2015.01.106 |
| [16] | Dong S, Wang W, Sun B, et al. Software development method of battery SOC estimation based on targetLink[J]. Electric Power Construction, 2015, 36(7): 181–186. |
| [17] | Wang Z, Jin X M, Sun B X, et al. Modeling research of power-assist battery based on circuit transient analysis[J]. Journal of Beijing Jiaotong University, 2012, 36(2): 91–94. |
| [18] |
魏克新, 陈峭岩.
基于多模型自适应卡尔曼滤波器的电动汽车电池荷电状态估计[J]. 中国电机工程学报, 2012, 32(31): 19–27.
Wei K, Chen Q Y. Electric vehicle battery SOC estimation based on multiple-model adaptive Kalman filter[J]. Proceedings of the CSEE, 2012, 32(31): 19–27. |
| [19] | 周凯. 电动汽车动力锂离子电池SOC检测技术的研究和开发[D]. 广州: 华南理工大学, 2012. Zhou K. Research on state-of-charge estimation for lithium-ion battery of electric vehicle[D]. Guangzhou:South China University of Technology, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10561-1012452366.htm |
| [20] | UDDS Training Manual Version 1.0[EB/OL]. (2009-10-05)[2016-12-10].https://www.wisconsin.edu/budget-planning/download/budget_development/buddev_docs/UDDSTrainingManualV1_1.pdf |
| [21] | Bryson A E. Applied linear optimal control:Examples and algorithms[M]. Cambridge: Cambridge University Press, 2002. |
| [22] | Bryson A E. Dynamic optimization[M]. Menlo Park, CA, USA: Addison-Wesley-Longman, 1999. |