



2. 上海交通大学电工与电子技术中心, 上海 200240
2. Center of Electrical & Electronic Technology, Shanghai Jiao Tong University, Shanghai 200240, China
1 引言
随着工业过程越来越复杂,保持控制系统良好性能变得越来越困难.系统性能评估方法可以有效地评估控制系统的性能,根据评估指标判断控制系统的实际工作状态与最佳工作状态之间的差距,并在相应方法的基础上改进控制策略,使工艺过程运行于最佳状态,从而提高生产绩效.
1989年,Harris提出了“反馈不变项”,并将其用来评估单变量控制系统的性能,标志着控制系统性能评估理论的诞生[1].在此基础上,Harris[2]等又把单变量最小方差控制准则引入到了多变量系统当中,利用多变量谱因子分解和丢番图方程的解来描述多变量系统.为了对单变量系统的时滞进行数学描述,Huang[3-8]等提出了系统滤波和相关分析算法,引入了关联矩阵,并将该方法推广到多变量系统.为了对多变量系统时滞进行更准确地描述,Yu[9-10]提出MIMO控制系统时滞的左右对角关联阵的描述方法.为了解决多变量系统存在的时滞和时变扰动相关问题,2011年,Zhou[11]等对单一时变扰动系统进行了性能评估研究.文[12]提出多模型混合的思想,实际多变量系统往往存在多时变扰动,针对此问题,文[13]将多模型混合权重引入控制系统性能评估.但对于多变量多时变扰动控制系统描述时,单一的关联矩阵方法对于系统时滞的描述将输入输出时滞不加区分,对于控制系统性能评估来说,容易造成控制系统的误差扩大.
本文针对具有大时滞多个时变扰动的多变量控制系统,结合多模型混合权重的思想,提出基于左右对角关联阵的多变量时变最小方差(combined left/right diagonal interactors multivariabletime-variant minimum variance,CMTMV)多扰动系统性能评估方法.针对输入输出同维的多变量控制系统,采取组合关联矩阵的描述方式,对输入输出时滞结构进行表征.首先,针对单一时变扰动单模型系统进行CMTMV控制器设计,然后,利用多模型混合权重的方式,得到多模型CMTMV控制器.最后,本文通过数值仿真和重油分馏过程的应用仿真,说明了多模型CMTMV评估方法在多变量时变多扰动控制系统性能评估方面的有效性.
2 被控对象描述被控对象输入的扰动函数矩阵可以通过左乘被控对象传递函数矩阵转化为被控对象输出的扰动传递函数矩阵,故被控对象输入的扰动均可转化为被控对象输出的扰动.本文将被控对象的所有扰动均转换为被控对象输出的扰动,基于Box-Jenkins模型,引入左右对角关联阵对多变量系统进行描述,其闭环控制框图如图 1所示.

|
| 图 1 多变量时变多扰动反馈控制系统 Figure 1 Multi-variable control system with time-variant-multi-disturbances |
图 1中,G为带时滞的多变量传递函数矩阵. Q为多变量控制器传递函数矩阵. DL、DR分别为被控对象传递函数矩阵的左右对角关联阵,如果多变量系统的时滞结构可以用对角矩阵的形式表达,可以简化求解过程,但是,对于每个输入有不同的输入时滞的系统,关联矩阵DL往往不是对角阵,为了适应MIMO系统的复杂时滞结构,右对角关联矩阵DR[9]被提出来,本文采用左右对角关联阵的结构来表达系统时滞结构,计算过程中仅需关联矩阵的阶次,无需再用传统方法分解出系统的关联矩阵,降低了计算的复杂程度和计算量,将时滞表达更加准确.被控对象输出的所有扰动表示为

|
(1) |
|
(2) |
|
(3) |

|
(4) |
式中,ai,t,j为白噪声序列,其中,i=1,2,…,n;j=1,2,…,n.
3 基于左右对角关联阵的多变量时变最小方差(CMTMV)控制器设计本文将左右对角关联阵引入控制器的设计环节,将控制对象的时滞信息在两个对角阵中表达.先针对每个扰动Ni,t ai,t的特性设计基于左右对角关联阵的最小方差(combined left/right diagonal interactors multivariable time-variant minimum variance,CMTMV)控制器.然后利用多模型思想,以混合权重的方式将单模型控制器混合得到多模型CMTMV控制器.
3.1 单模型CMTMV控制器设计当设定值为0、时变扰动Ni,t ai,t作用于多变量系统时,根据Box-Jenkins模型,其输出响应为

|
(5) |
需要指出的是,对角关联矩阵并不是唯一的.矩阵DL,DR按文[7]的方式求解.

|
(6) |

|
(7) |
DL中

对角关联矩阵存在与否,不仅要看被控对象输入输出时滞矩阵DI/O是否为满秩矩阵,还要看马尔可夫参数第一项是否满秩.若使分解

|
(8) |
满秩.
方程(5) 两边同时左乘q-dDL,d为DL的阶数,令



|
(9) |
对

|
(10) |
将式(10) 代入式(9),得

|
(11) |
由于式(11) 右侧各项做内积运算后非负,故:

|
(12) |
式(12) 中当且仅当

|
(13) |
式(13) 代入式(11),得:

|
(14) |
将式(14) 代入(13) 得CMTMV控制器

|
(15) |

|
(16) |
由于基于单一时变扰动模型的CMTMV控制器只考虑了某一时变扰动Ni,t ai,t,当控制系统存在多个时变扰动时,CMTMV方法需要以混合加权的方法来解决带多个时变扰动的控制系统性能评估问题[11].在CMTMV控制器中引入多模型混合思想:在每一工作时段,取该时段性能评估效果最优的CMTMV控制器,并将该CMTMV控制器作用下的被控变量的平均方差作为多模型CMTMV评估方法的基准.
工业过程对象普遍存在时滞,控制器切换时,由于控制器参数变化,影响了系统的暂态性能,通常采用控制器缓慢变化的方法来抑制暂态误差.根据多模型混合的思想,基于每个时变扰动的作用建立混合权重,利用单模型的CMTMV控制器加权得到多模型CMTMV控制器,并将控制器作用下的被控变量的平均输出方差作为多模型CMTMV性能评估方法的基准,以评估多变量时变多扰动控制系统的性能.
当多个时变扰动
|
(17) |
则加权后,多模型CMTMV控制器为

|
(18) |

|
(19) |
式中αi(t),{i=1,2,…,m}为相应CMTMV控制器的混合权重.当t∈TTotal时,αi(t)满足下面等式.

|
(20) |

|
(21) |

|
(22) |

|
(23) |
其中,
|
(24) |
其中,Ui、Li为Ti区间的上下限,即Ti={t:Li < t < Ui}.为使αi(t)满足上面等式,
|
(25) |
文[17]指出:将理想控制器作用下的被控变量的平均输出方差作为一个基准,将基准多变量控制器作用下的被控变量的平均输出方差与实际多变量控制器作用下的被控变量的平均输出方差进行比值运算,得到一个介于[0, 1]之间的比值,通过比值来判断实际控制器与理想控制器之间存在的差距,从而实现多变量时变多扰动系统的性能评估.因此,本文采用性能指标
|
(26) |
|
(27) |
式中,n为多变量系统被控变量的个数,δMV,j2是多模型CMTMV控制器作用下第j个被控变量的输出方差,δy,j2为实际控制器控制作用下第j个被控变量的输出方差.性能评估指标η满足0≤η≤1.因此,通过该性能评估指标η,可实现对于多个扰动的多变量控制系统进行性能评估.
多模型混合加权最小方差控制准则是一个稳定的评估基准,多模型混合权重大小取决于每个单一时变扰动模型的CMTMV控制器的参与程度.当单一模型的Ni,t ai,t作用于系统时,CMTMV控制器的混合权重为1,基于其他模型的CMTMV控制器的混合权重为0;当多个时变扰动同时作用于多变量控制系统时,系统会根据扰动的作用时间来相应分配各控制器的混合权重.
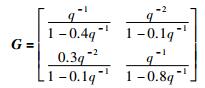
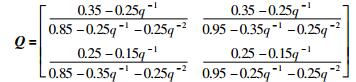
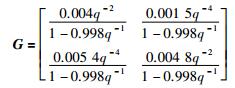
4 仿真研究 4.1 数值仿真被控对象的传递函数取
|
(28) |
对控制对象进行分解条件判断
|
(29) |
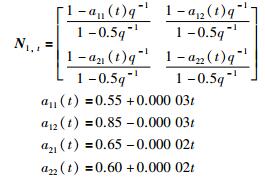
式(29) 显然满秩,故控制对象时滞的左右对角关联阵分解存在.假设系统有多变量控制系统有3个时变扰动,且扰动特性用传递函数表示如下:
|
(30) |
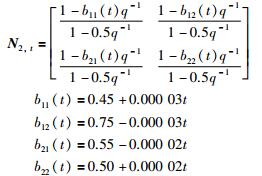
|
(31) |
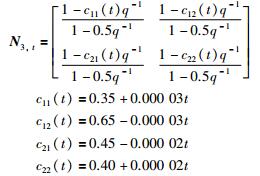
|
(32) |
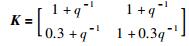
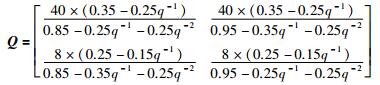
N1,t,N2,t,N3,t作用的时间分别是1 s~2 000 s、1 000 s~2 000 s、1 500 s~3 000 s,噪声源为白噪声.本文的实际控制器为
|
(33) |
利用多模型混合思想设计多模型CMTMV控制器Q时,混合权重α1(t),α2(t),α3(t)取值曲线如图 2~图 4所示.基于不同评估方法在不同时段的输出方差与性能指标如表 1和表 2所示.

|
| 图 2 混合参数α1(t)取值曲线 Figure 2 Curve of mixing parameter α1(t) |

|
| 图 3 混合参数α2(t)取值曲线 Figure 3 Curve of mixing parameter α2(t) |

|
| 图 4 混合参数α3(t)取值曲线 Figure 4 Curve of mixing parameter α3(t) |
| Output | 0~1 000 s | 1 000 s~1 500 s | 1 500 s~2 000 s | 2 000 s~3 000 s | 0~3 000 s | |
| CMTMV(N1,t) | y1 y2 |
1.760 0 1.725 8 |
4.118 4 4.090 2 |
4.702 4 4.779 6 |
1.767 4 1.794 5 |
3.087 0 3.097 5 |
| CMTMV(N2,t) | y1 y2 |
1.806 4 1.762 3 |
4.137 6 4.081 5 |
4.688 1 4.732 3 |
1.747 7 1.763 9 |
3.095 0 3.085 0 |
| CMTMV(N3,t) | y1 y2 |
1.855 3 1.802 3 |
4.181 9 4.101 6 |
4.708 7 4.723 0 |
1.743 8 1.750 0 |
3.122 4 3.094 2 |
| MMTMV | y1 y2 |
1.828 2 1.753 3 |
4.192 4 4.088 0 |
4.690 4 4.736 2 |
1.747 7 1.759 3 |
3.114 7 3.084 2 |
| CMTMV | y1 y2 |
1.760 0 1.725 8 |
4.122 4 4.086 3 |
4.695 7 4.737 2 |
1.743 8 1.750 0 |
3.080 5 3.074 8 |
| 实际方差 | y1 y2 |
1.874 7 1.801 1 |
4.234 1 4.143 4 |
4.737 3 4.789 3 |
1.747 9 1.781 8 |
3.148 5 3.128 9 |
| 评估方法 | 0~1 000 s | 1 000 s~1 500 s | 1 500 s~2 000 s | 2 000 s~3 000 s | 0~3 000 s |
| CMTMV(N1,t) | 0.948 5 | 0.979 9 | 0.995 3 | 1.008 1 | 0.985 2 |
| CMTMV(N2,t) | 0.971 0 | 0.981 1 | 0.988 9 | 0.994 9 | 0.984 5 |
| CMTMV(N3,t) | 0.995 2 | 0.988 8 | 0.990 0 | 0.989 9 | 0.990 3 |
| MMTMV | 0.974 3 | 0.988 4 | 0.989 5 | 0.993 6 | 0.987 5 |
| CMTMV | 0.948 5 | 0.979 9 | 0.990 2 | 0.989 9 | 0.980 5 |
表 1中可以看到,基于N1,t的CMTMV方法的评估指标基本都大于多模型CMTMV方法的性能评估指标,故基于N1,t的CMTMV方法的评估方法效果逊于多模型CMTMV方法,同理,基于N3,t的CMTMV方法的评估方法效果逊于多模型CMTMV方法.在0~1 000 s,1 000 s~1 500 s,2 000 s~3 000 s,0~3 000 s这4个时段,基于N2,t的CMTMV方法的评估指标均大于多模型CMTMV方法;在1 500 s~2 000 s时段,二者评估指标大小相当,故多模型CMTMV方法评估效果优于基于N2,t的CMTMV方法.对于文[18]中提出的MMTMV方法,就评估指标而言,在0~1 000 s,1 000 s~1 500 s,2 000 s~3 000 s这3个时段,MMTMV方法的评估指标均大于基于多模型CMTMV方法的性能评估指标;虽在1 500 s~2 000 s时段,二者评估效果相当,但就总体过程来看,在0~3 000 s时段,MMTMV方法的评估方法效果逊于多模型CMTMV方法.
从表 2中可以直观地对性能评估指标进行比对,由于1 500 s~2 000 s多扰动同时影响控制系统,且本文并未进行控制器间歇切换的误差机理模型的研究,存在一定程度的随机误差,比如,2 000 s~3 000 s由于只有一个扰动N3,t作用,扰动N1,t和N3,t模型差距又较大,而针对N1,t设计的控制器去控制扰动N3,t,有性能劣于实际控制器的可能性.但就全时间段来说,多模型CMTMV评估方法是有效的,而且由于对输入输出时滞结构的描述,故多模型CMTMV方法进行性能评估控制时滞效果较好.综上,说明了多模型CMTMV方法在多变量时变多扰动控制系统性能评估上的有效性.
4.2 重油分馏控制系统性能评估数值仿真从理论上说明了本文提出的多模型CMTMV评估方法的有效性,而就实际化工过程而言,为了说明左右对角关联阵在系统时滞求取方面的优势,本文就文[19-20]提出的大时滞多变量系统为控制对象,进行了多模型CMTMV方法的性能评估应用,并与MMTMV方法的评估效果进行对比.
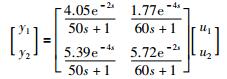
重油分馏是化工生产中生成中间油料的过程,是一个典型的含多时变扰动大时滞的多变量控制系统,系统由进料带入的汽态过热蒸汽流提供热量,轻组分由塔顶馏出,产物由塔底收取,本文取塔顶抽出环节和塔底回流环节组成的系统为研究对象,该重油分馏工艺流程如图 5所示,即以顶部抽出u1和塔底回流负荷u2作为控制变量,以塔顶终馏点y1和塔底回流温度y2作为被控变量,控制对象的时滞较大,系统存在多个时变扰动.

|
| 图 5 重油分馏工艺流程图 Figure 5 The diagram of heavy oil fractionation process |
其传递函数为
|
(34) |
采样时间为1 s,得到相应对象的离散化模型为
|
(35) |
当实际控制器采取式(36) 时,采用本文所述方法进行性能评估的结果如表 3所示,两被控变量输出方差如图 6所示.
| 评估方法 | 0~1 000 s | 1 000 s~1 500 s | 1 500 s~2 000 s | 2 000 s~3 000 s | 0~3 000 s |
| MMTMV | 0.917 1 | 0.945 8 | 0.957 1 | 0.970 0 | 0.949 1 |
| CMTMV | 0.893 0 | 0.937 7 | 0.957 8 | 0.966 4 | 0.942 5 |

|
| 图 6 y1和y2输出曲线 Figure 6 Output curve of y1 and y2 |
|
(36) |
由表 3可见,在0~3 000 s的各个时间段内,只有在1 500 s~2 000 s时间段二者评估效果相当,而在其余时间段,多模型CMTMV的性能评估指标均小于MMTMV方法的性能评估指标,所以对于时滞较大的系统,由于多模型CMTMV将控制对象时滞采用左右对角关联阵的形式表达,得到的性能评估效果更优.
5 结论本文提出的针对多变量时变多扰动系统的CMTMV方法引入了左右对角关联阵对控制对象的输入输出时滞结构进行描述,能够更准确地对多变量时变多扰动系统进行性能评估,相比于用单一关联矩阵对系统时滞进行描述的设计方法要更准确,计算过程中仅需关联矩阵的阶次,无需再用传统方法分解出系统的关联矩阵,降低了计算的复杂程度和计算量.
目前,利用本文方法对多变量时变多扰动系统进行性能评估之前,控制对象需满足左右对角关联阵分解条件,为了解决不同类型的控制对象的性能评估问题,在控制对象的推广应用上还需要进行进一步地研究.由于多变量系统对于模型与先验知识的依赖性仍然较高,基于数据驱动的多变量多时变扰动控制系统性能评估方法将有待进一步研究.
| [1] | Harris T J. Assessment of control loop performance[J]. The Canadian Journal of Chemical Engineering, 1989, 67(5): 856–861. DOI:10.1002/cjce.v67:5 |
| [2] | Harris T J, Boudreau F, MacGregor J F. Performance assessment of multivariable feedback controllers[J]. Automatica, 1996, 32(11): 1505–1518. DOI:10.1016/S0005-1098(96)00108-2 |
| [3] | Huang B, Shah S L, Fujii H. Identification of the time delay/interactor matrix for MIMO systems using closed-loop data[C]//Proceedings of the 13th IFAC World Congress. Kington, UK:IFAC, 1996:355-360. |
| [4] | Huang B, Shah S L, Kwok E K. Good, bad or optimal? Performance assessment of multivariable processes[J]. Automatica, 1997, 33(6): 1175–1183. DOI:10.1016/S0005-1098(97)00017-4 |
| [5] | Huang B, Shah S L. Practical issues in multivariable feedback control performance assessment[J]. Journal of Process Control, 1998, 8(5/6): 421–430. |
| [6] | Huang B, Ding S X, Thornhill N. Practical solutions to multivariate feedback control performance assessment problem:Reduced a priori knowledge of interactor matrices[J]. Journal of Process Control, 2005, 15(5): 573–583. DOI:10.1016/j.jprocont.2004.10.006 |
| [7] | Huang B, Ding S X, Thornhill N. Alternative solutions to multi-variate control performance assessment problems[J]. Journal of Process Control, 2006, 16(5): 457–471. DOI:10.1016/j.jprocont.2005.09.003 |
| [8] | Ni B, Xiao D, Shah S L. Time delay estimation for MIMO dynamical systems-with time-frequency domain analysis[J]. Journal of Process Control, 2010, 20(1): 83–94. DOI:10.1016/j.jprocont.2009.10.002 |
| [9] | Jie Yu, S. Joe Qin. MIMO control performance monitoring using left/right diagonal interactors[J]. Journal of Process Control, 2009, 19(8): 1267–1276. DOI:10.1016/j.jprocont.2009.02.002 |
| [10] |
李大字, 焦军胜, 靳其兵.
基于对角关联矩阵的广义多变量控制系统性能评价[J]. 信息与控制, 2013, 42(2): 157–161.
Li D Z, Jiao J S, Jin Q B. Performance assessment of generalized multivariable control systems based on diagonal interactors. information and control[J]. Information and Control, 2013, 42(2): 157–161. |
| [11] | Zhou M F, Xie L, Pan H T, et al. Performance assessment of PID controller with time-variant disturbance dynamics[C]//Proceedings of the 2011 International Symposium on Advanced Control of Industrial Processes. Piscataway, NJ, USA:IEEE, 2011:650-655. |
| [12] | Kuipers M, Ioannou P. Multiple model adaptive control with mixing[J]. IEEE Transactions on Automatic Control, 2010, 55(8): 1822–1836. DOI:10.1109/TAC.2010.2042345 |
| [13] |
张巍, 王昕, 王振雷.
基于多模型混合最小方差控制的时变扰动控制系统性能评估[J]. 自动化学报, 2014, 40(9): 2037–2044.
Zhang W, Wang X, Wang Z L. Performance assessment of control loop with time-variant disturbance dynamics based on multi-model mixing minimum variance control[J]. Acta Automatica Sinica, 2014, 40(9): 2037–2044. |
| [14] | Fekri S, Athans M, Pascoal A. Issues, progress and new results in robust adaptive control[J]. International Journal of Adaptive Control and Signal Processing, 2006, 20(10): 519–579. DOI:10.1002/(ISSN)1099-1115 |
| [15] | Fekri S, Athans M, Pascoal A. Robust multiple model adaptive control (RMMAC):A case study[J]. International Journal of Adaptive Control and Signal Processing, 2007, 21(1): 1–30. DOI:10.1002/(ISSN)1099-1115 |
| [16] | Baldi S, Ioannou P, Mosca E. Multiple model adaptive mixing control:The discrete-time case[J]. IEEE Transactions on Automatic Control, 2012, 57(4): 1040–1045. DOI:10.1109/TAC.2011.2169620 |
| [17] | Huang B, Shah S L. Performance assessment of control loops:Theory andapplications[M]. Berlin, Germany: Springer-Verlag, 1999. |
| [18] |
刘春平, 王昕, 王振雷.
基于MMTMV方法的多变量时变扰动系统性能评估[J]. 自动化学报, 2015, 41(5): 928–935.
Liu C P, Wang X, W Z L. Performance assessment of MIMO system with time-variant disturbances based on MMTMV method[J]. Acta Automatica Sinica, 2015, 41(5): 928–935. |
| [19] |
张海涛, 陈宗海, 秦廷, 等.
重油分馏塔基于混沌神经网络的Laguerre函数模型自适应预测控制[J]. 信息与控制, 2004, 33(1): 14–18.
Zhang HT, Chen ZH, Qin T, et al. A Laguerre function model adaptive predictive control strategy based on a chaotic neural network for heavy oil distillation column[J]. Information and Control, 2004, 33(1): 14–18. |
| [20] |
宁璀, 张泉灵, 苏宏业.
多变量一阶加纯滞后系统的预测函数控制[J]. 信息与控制, 2007, 36(6): 702–707.
Ning C, Zhang Q L, Su H Y. Predictive functional control for multivariable first order plus dead time system[J]. Information and Control, 2007, 36(6): 702–707. |