



1 引言
近二十年里,基于T-S模糊模型[1]的非线性系统稳定性分析和控制器综合得到了很多学者的广泛研究,大部分的结果都是基于普通的二次李亚普诺夫函数[2]和并行分布补偿(parallel distributed compensation,PDC)算法[3].然而,普通的二次李亚普诺夫函数具有一定的保守性.为了克服这个问题,Tanaka等[4]提出了模糊李亚普诺夫方法,相对于普通的二次李亚普诺夫函数,模糊李亚普诺夫函数可以得到更宽松的稳定条件.之后,国内外很多学者对模糊李亚普诺夫函数进行了研究[5-10].王岩等[5]将模糊李亚普诺夫方法应用到离散模糊系统中.Tanaka等[6]又基于模糊李亚普诺夫函数,提出了一种广义系统方法.文[7]通过引入松弛矩阵变量,解除了系统矩阵和李亚普诺夫矩阵的耦合关系,确保了额外的自由度,也为后来的很多研究提供了新思路.文[8]采用non-PDC控制律方法,获得了更小保守性的镇定条件并验证了non-PDC控制律的有效性.文[9]构造了一个新的模糊李亚普诺夫函数,获得了新的稳定条件和镇定条件.文[10]通过深入研究前件隶属函数对时间导数的特性,在文[7]的基础上进行改进,获得了更小保守性稳定条件.近来,Xie等[11-13]又获得了新的降低连续和离散时间T-S模糊系统稳定条件保守性方法.然而,相对于系统稳定条件保守性降低的研究,对系统镇定条件保守性降低问题的探讨较少,而且上述大部分文献选用的模糊李亚普函数同样存在一定的保守性,因此有待进一步研究.
H∞控制器设计问题一直以来受到很多学者的关注.自模糊李亚普诺夫方法提出之后,很多学者基于该方法对T-S模糊系统的H∞控制器设计问题进行了研究,初期在离散模糊系统有探讨[14-15].而近几年,在连续模糊系统的研究越来越多,也取得了一定的成果[16-20],但依然存在很大的改进空间,如构造更合适的模糊李亚普诺夫函数,或引入更松弛的矩阵变量,或对隶属函数时间导数的特性进一步探究等.
针对上述原因,本文基于一个新的模糊李亚普诺夫函数,采用PDC控制结构,对连续T-S模糊系统进行了分析,通过深入研究前件隶属函数时间导数的特性,并引入更松弛矩阵变量,解除了系统矩阵和李亚普诺夫矩阵的耦合关系,获得了一个新的镇定条件.然后对系统的H∞控制器设计问题进行了研究,给出了相应的H∞控制器方法.最后通过2个数值仿真验证了所提方法的有效性.
2 问题描述考虑下面一类连续时间T-S模糊系统,其第i条模糊规则表示为:
|
(1) |
式中,x(t)∈Rn为系统的状态向量,u(t)∈Rm为系统的控制输入,w(t)∈Rs为外界干扰输入,y(t)∈Rl为系统的输出,x1(t),x2(t),…,xp(t)为模糊前件变量,Mij为模糊集合,r为模糊推理规则数,Ai、Bi、Ei和Ci为具有适当维数的已知常数矩阵.
给定输入对(x(t),u(t)),采用单点模糊化、乘积推理和平均加权反模糊化,可得模糊系统的整个状态方程为
|
(2) |
其中,
|
式中,μij(xj(t))是xj(t)关于模糊集合Mij的隶属函数;wi(x(t))满足wi(x(t))≥0且

|
(3) |
根据并行分布补偿算法(PDC)可设计局部状态反馈控制器:
|
(4) |
整个状态反馈控制律为

|
(5) |
本文研究的目标有2个:
(1) 当w(t)=0时,找到一个控制律(5),使闭环系统(2) 镇定,并获得一个更松弛的镇定条件;
(2) 在零初始条件下,对于任意有界干扰w(t)∈L2[0,∞),满足下面的H∞性能:
|
(6) |
其中,||·||2代表L2范数,γ>0.
为了证明本文中的主要结果,首先给出如下的特性与引理:
特性1 [10] 给定l∈{1,2,…,r},考虑hρ(ρ∈{1,2,…,r})满足凸和特性(3),则对任意矩阵X ∈Rn×n和Pρ∈Rn×n,式(7)成立:

|
(7) |
另外,由式(3) 可知,式(8) 也成立:

|
(8) |
其中,R为任意合适维数的对称矩阵,0≤ε≤1.
引理1 (relaxation principle)[8] 对于矩阵Ƴij和条件:

|
(9) |
如果存在矩阵Ωii和Ωij(i < j),满足条件:

|
(10) |

|
(11) |
|
(12) |
则不等式(9) 成立.
为便于描述,以下分别用hi、hj表示hi(x(t))和hj(x(t)),符号“*”表示对称矩阵中的对称项.
3 松弛镇定条件本节基于模糊李亚普诺夫方法,通过深入研究前件隶属函数时间导数的特性,并引入更松弛的矩阵变量,解除了系统矩阵和李亚普诺夫矩阵的耦合关系,获得了一个更松弛的镇定条件.
考虑w(t)=0,将控制律(5) 代入式(2) 得闭环系统:

|
(13) |
从式(13) 可以看出,对所有的t有:

|
(14) |
因此,对任意合适维数的方阵M,可以得到
|
(15) |
下面的定理将给出闭环系统(13) 镇定的充分条件.
定理1 假设:
|
(16) |
其中ϕρ≥0,ρ∈{1,2,…,r},给定标量0≤ε≤1,μ>0,对一些固定的l∈{1,2,…,r},如果存在对称矩阵Ti、Y、S、Πii、


|
(17) |

|
(18) |

|
(19) |

|
(20) |

|
(21) |

|
(22) |

|
(23) |

|
(24) |

|
(25) |

|
(26) |
成立,则闭环系统(13) 镇定,控制器增益为Fi= SiT N-T.式中,

|
(27) |
|
(28) |
证明 考虑候选模糊李亚普诺夫函数形式:

|
(29) |
式中,Pi= PiT,R = RT,(Pi+εR)≥0.
求V(x(t))对时间的导数,并与式(8) 和式(15) 相加整理可得

|
式中,
|
由特性1和假设(16) 可得
|
(30) |
因此有:
|
(31) |
式中,
|
(32) |
对上式左边乘以非奇异矩阵diag(M-1,M-1),右边乘以diag(M-T,M-T)可得:
|
(33) |
其中,

|

|
定义变量N = M-1,Ti= NPi NT,Tϕ= NPϕ NT,S = NXNT,Y = NRNT,Sj= NFjT,可以得到式(27) 和式(28).由引理1可知,如果式(17)~式(26) 成立,则有
本节在上节的基础上,对连续T-S模糊系统的H∞控制器设计问题进行研究.利用模糊李亚普诺夫函数和线性矩阵不等式理论,给出了系统H∞控制器设计方法.
考虑w(t)≠0,由式(15) 同理可得:
|
(34) |
下面的定理将给出系统H∞控制器设计方法.
定理2 假设式(16) 成立,给定标量γ>0,0≤ε≤1,μ>0,如果对一些固定的l∈{1,2,…,r},存在对称矩阵Ti、Y、S、Πii、

|
(35) |
|
(36) |

|
证明 如文[18]中所示,如果:

|
(37) |
成立,则条件(6) 成立.
考虑模糊李亚普诺夫函数(29),求其对时间的导数,并与式(8) 和式(34) 相加,式(37) 可整理为
|
式中,
|
(36) |
应用矩阵的Schur补性质,Φij < 0,有:
|
对上式左边乘以非奇异矩阵diag(M-1,I,M-1,I),右边乘以diag(M-T,I,M-T,I)可得:

|
式中,

|
同样定义变量N = M-1,Ti= NPi NT,Tϕ= NPϕ NT,S = NXNT,Y = NRNT,Sj= NFjT,可得到式(35) 和式(36).因此如果式(17)~式(26) 成立,则闭环模糊控制系统(2) 的H∞范数小于γ,控制器增益由Fi= SiTN-T给出.证毕.
推论1 假设(16) 成立,给定标量0≤ε≤1,μ>0,令ρ=γ2,如果优化问题:

|
有解Ti、Y、N、S、Si、Πii、Πij、

例1 考虑由两条规则描述的连续T-S模糊模型[7]:
规则1:如果x2是Φ11,则

|
规则2:如果x2是Φ12,则

|
其中,
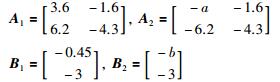
|
假设ϕ1=ϕ2=1,令μ=0.04,ε=0.5,l=1,参数0≤a≤25,0≤b≤2,分别采用文[10]定理5.1和本文定理1进行仿真,其中文[10]定理5.1仿真时取i=l=1.基于两种方法获得的镇定区域如图 1所示,其中(*)代表LMIs有可行解,a和b表示在一定范围内取值的系统未知参数.

|
| 图 1 镇定区域 Figure 1 The stabilizable regions |
从图 1可以明显地看出,基于本文定理1的镇定区域比文[10]中定理5.1要大很多,因此可推断本文定理1获得的镇定条件具有较小的保守性,进一步说明了所提方法的有效性.
注1 不考虑松弛引理1,令ε=0,本文定理1可转换为文[10]中的定理5.1,因此文[10]中定理5.1是本文定理1的一种特殊情况.
例2 考虑一类小车倒立摆平衡问题,摆的运动方程为[19]
|
式中,x1表示摆与垂直方向的角度;x2是角速度;g=9.8 m/s2是重力常数;m是摆的质量;M是小车的质量;2l是摆的长度;u是作用在车上的力;w是外部干扰;a= 
小车倒立摆的T-S模型为:
规则1:如果x1(t)大约是0,则
|
规则2:如果x1(t)大约是
|
其中,

|
两组规则的隶属度函数表示为
|
PDC控制律为
规则1:如果x1(t)大约是0,则

|
规则2:如果x1(t)大约是

|
考虑两种方法对本例进行仿真,方法及获得的最小扰动衰减度γmin对比如表 1所示.其中,本文推论1仿真时取ε=0.4,μ=0.01,ϕ1=ϕ2=1.
从表 1中可以看出,本文推论1得到的γmin更小,因此可知本文推论1相比文[19]提高了系统的H∞性能,对干扰的抑制效果更好.
给定标量γ=0.01,ε=0.4,μ=0.01,ϕ1=ϕ2=1,利用本文定理2及推论1,可得状态反馈增益分别为
定理2:
|
推论1:

|
假设初始条件为

|
| 图 2 系统响应曲线 Figure 2 The response curve of the system |
本文对一类连续时间T-S模糊系统的镇定和H∞控制器设计问题进行了研究.首先,基于模糊李亚普诺夫函数和并行分布补偿(PDC)算法,获得了一个新的LMI形式表示的镇定条件,因此可以简单地通过凸优化技术解决.然后研究了系统的H∞控制器设计问题,并给出了H∞控制器设计方法.与一些已有的结果相比,获得的镇定条件增大了系统的镇定区域,设计的H∞控制器具有较小的干扰衰减水平,降低了保守性.最后的两个仿真示例说明了所提方法的有效性.今后的工作将基于模糊李亚普诺夫方法对带有参数不确定或时滞的连续模糊系统进行研究.另外,对于系统的控制器设计也可采用non-PDC控制律方法.
| [1] | Takagi T, Sugeno M. Fuzzy identification of systems and its applications to modeling and control[J]. IEEE Transactions on Systems man & Cybernetic, 1985, 15(1): 116–132. |
| [2] | Tanaka K, Sugeno M. Stability analysis and design of fuzzy control systems[J]. Fuzzy Sets & Systems, 1992, 45(2): 135–156. |
| [3] | Wang H O, Tanaka K, Griffin M.Parallel distributed compensation of nonlinear systems by Takagi-Sugeno fuzzy model[C]//IEEE International Conference on Fuzzy Systems.Piscataway, NJ, USA:IEEE, 1995:531-538. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=409737 |
| [4] | Tanaka K, Hori T, Wang H O.A fuzzy Lyapunov approach to fuzzy control system design[C]//American Control Conference.Piscataway, NJ, USA:IEEE, 2001:4790-4795. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=945740 |
| [5] |
王岩, 张庆灵, 孙增圻, 等.
离散模糊系统分析与设计的模糊Lyapunov方法[J]. 自动化学报, 2004, 30(2): 255–260.
Wang Y, Zhang Q L, Sun Z Q, et al. Analysis and design of discrete fuzzy system with fuzzy Lyapunov approach[J]. Acta Automatica Sinica, 2004, 30(2): 255–260. |
| [6] | Tanaka K, Ohtake H, Wang H O. A descriptor system approach to fuzzy control system design via fuzzy Lyapunov functions[J]. IEEE Transactions on Fuzzy Systems, 2007, 15(3): 333–341. DOI:10.1109/TFUZZ.2006.880005 |
| [7] | Mozelli L A, Palhares R M, Avellar G S C. A systematic approach to improve multiple Lyapunov function stability and stabilization conditions for fuzzy systems[J]. Information Sciences, 2009, 179(8): 1149–1162. DOI:10.1016/j.ins.2008.12.002 |
| [8] | Chang X H, Yang G H. Relaxed stabilization conditions for continuous-time Takagi-Sugeno fuzzy control systems[J]. Information Sciences, 2010, 180(17): 3273–3287. DOI:10.1016/j.ins.2010.05.006 |
| [9] | Bouyahya A, Manai Y, Haggege J.New condition of stabilization for continuous Takagi-Sugeno fuzzy system based on fuzzy Lyapunov function[C]//International Conference on Electrical Engineering and Software Applications.Piscataway, NJ, USA:IEEE, 2013:1-7. http://ieeexplore.ieee.org/document/6578391/ |
| [10] | Faria F A, Silva G N, Oliveira V A. Reducing the conservatism of LMI-based stabilization conditions for TS fuzzy systems using fuzzy Lyapunov functions[J]. International Journal of Systems Science, 2013, 44(10): 1956–1969. DOI:10.1080/00207721.2012.670307 |
| [11] | Xie X P, Liu Z W, Zhu X L. An efficient approach for reducing the conservatism of LMI-based stability conditions for continuous-time T-S fuzzy systems[J]. Fuzzy Sets & Systems, 2015, 263: 71–81. |
| [12] | Xie X P, Xie J, Hu S. Reducing the conservatism of stability conditions for continuous-time T-S fuzzy systems based on an extended approach[J]. Neurocomputing, 2016, 173: 1655–1659. DOI:10.1016/j.neucom.2015.09.038 |
| [13] | Xie X P, Weng S X, Zhang H F. Reducing the conservatism of stability analysis for discrete-time T-S fuzzy systems based on a delayed Lyapunov function[J]. Neurocomputing, 2016, 171(C): 1139–1145. |
| [14] | Wu H N, Zhang H Y. Reliable fuzzy control for a class of discrete-time nonlinear systems using multiple fuzzy Lyapunov functions[J]. IEEE Transactions on Circuits & Systems Ⅱ:Express Briefs, 2007, 54(4): 357–361. |
| [15] | Zhou S, Lam J, Zheng W X. Control design for fuzzy systems based on relaxed non-quadratic stability and H∞ performance conditions[J]. IEEE Transactions on Fuzzy Systems, 2007, 15(2): 188–199. DOI:10.1109/TFUZZ.2006.879996 |
| [16] | Hsu S Y, Yeh C C, Su Y M, et al.An improved result for stabilization and H∞ control of T-S fuzzy systems[C]//Intelligent Control and Automation (WCICA), 2010 8th World Congress on.Piscataway, NJ, USA:IEEE, 2010:514-519. http://ieeexplore.ieee.org/document/5553973/ |
| [17] | Pan J, Fei S, Yudong N I, et al. New approaches to relaxed stabilization conditions and H∞ control designs for T-S fuzzy systems[J]. Journal of Control Theory & Applications, 2012, 10(1): 82–91. |
| [18] | Jaadari A, Guerra T M, Sala A, et al.Finsler's relaxation for local H∞ controller design of continuous-time Takagi-Sugeno models via non-quadratic Lyapunov functions[C]//Proceedings of the American Control Conference.Piscataway, NJ, USA:IEEE, 2013:5648-5653. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6580722 |
| [19] | Ho C C, Chou Y S, Chang F R.A new parameter-dependent Lyapunov function approach for robust control[C]//International Conference on System Science and Engineering.Piscataway, NJ, USA:IEEE, 2014:50-55. http://ieeexplore.ieee.org/document/6887903/ |
| [20] | Márquez R, Guerra T M, Bernal M, et al. A non-quadratic Lyapunov functional for H∞ control of nonlinear systems via Takagi-Sugeno models[J]. Journal of the Franklin Institute, 2016, 353(4): 781–796. DOI:10.1016/j.jfranklin.2016.01.004 |