



2. 国家海洋局第一海洋研究所, 山东 青岛 266061;
3. 中国石油大学(华东)信息与控制工程学院, 山东 青岛 266580
2. First Institute of Oceanography, State Oceanic Administration, Qingdao 266061, China;
3. College of Information and Control Engineering, China University of Petroleum, Qingdao 266580, China
1 引言
随着海洋无人平台的兴起以及自动导航、自动控制等技术的快速发展,无人船成为一个研发的热点[1-3]. 21世纪以来已有多个国家超过40个海洋研究单位研发了用于环境监测、海洋测绘、水声通讯中继等不同用途的无人船[4-8].无人船自动控制是无人船研究的一项重要内容,其中位点跟踪是其重要组成部分,其优点是可以使无人船快速地到达期望位置,并能实现多种测量轨迹,如直线、弓字形轨迹等.因此,为节省航时和航程、满足多种应用需求,位点跟踪作为无人船的一项重要基本功能,受到了相当的关注[9].
无人船位点跟踪的控制目标一般是使无人船所在位点与期望位点之间的距离快速收敛于零[10].目前已有多位学者针对使用方向舵操控的大型船舶进行了相关研究. Pettersen等[11]将四阶船舶模型转化为级联系统,并基于李亚普诺夫理论设计了转动矩控制量,完成了期望位点间的直线跟踪仿真.针对单推进式船舶,Fossen等[12]基于LOS(line-of-sight)投影算法进行了位点跟踪仿真.而针对大型油轮,Moreira等[13]使用PID(proportion-integral-derivative)控制和LOS投影算法设计了位点直线跟踪,并进行了相关的仿真工作.然而,双推进式无人船的转向通过推进器转速差产生的力矩控制,无法直接利用上述有舵船舶的自动跟踪理论.当前无人船控制实际应用中仍以PID控制为主,该方法虽然已经非常成熟,但其参数需要经验确定,且易出现超调和振荡的现象,因此仍有必要研究其他控制算法来进一步提高无人船的自主控制性能.若无人船系统能近似为线性系统,则可利用线性系统的线性二次型(LQ)最优控制理论[14]来设计控制器,实现更优的控制性能.文[15-16]的相关学者就将一种LQR(linear quadratic regulator)与Kalman滤波结合的技术用于船只的自动驾驶仪设计,证明了利用LQ最优控制方法的有效性.为此,针对自研发的双推进双体测深无人船“USBV”(unmanned surface bathymetry vehicle)[17],本研究将结合其推进系统的特性,并基于LQR进行自动位点跟踪控制器的设计,最后通过仿真和湖试试验进行验证.
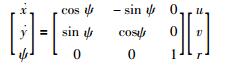
2 双推进双体无人船建模 2.1 三自由度水动力方程无人船建模需合适的坐标系,本研究采用了地球和船体两个坐标系[18].无人船模型可利用刚体六自由度方程表示,但为简化控制律的设计且考虑无人船以水平面内运动为主的特性,建模时忽略无人船的垂向、横滚和俯仰运动,从而将六自由度水动力方程简化为水平面内的三自由度水动力方程[19].此时,无人船的平面运动方程可表示为
|
(1) |
其中,位置状态向量η=[x,y,ψ]T表示地球坐标系中无人船的位置及航向,速度状态向量ν=[u,v,r]T表示船体坐标系中无人船的轴向、侧向速度和偏航角速度.
当无人船在水面低速航行时,其受到的阻力与速度通常可近似为线性关系,其水动力模型中的水动力阻力项可采用线性形式构建,因此无人船水动力方程可表示为

|
(2) |
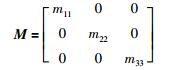
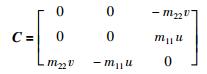
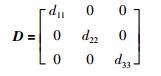
其中,M为无人船的惯性质量矩阵,C为向心力和科氏力系数矩阵,D为阻力系数矩阵, τ为无人船的纵向、横向推力及力矩矢量.各系数矩阵M、C和D分别定义为
|
(3) |
|
(4) |
|
(5) |
其中,

|
(6) |
其中,Fl和Fr分别表示左/右推进器的推力,d表示推进器轴到无人船中线的距离,本研究中d=0.3m.此时,无人船的水动力方程可表示为
|
(7) |
无人船水动力方程中的参数可通过理论和试验获得,本小节将进行相关参数的辨识工作.本研究中的无人船对象(如图 1)采用双推进双体结构,推进系统包括两个采用400 W直流无刷电机的水下推进器及相应的控制器.推进系统通过调节控制器的输入控制电压(0~5 V范围)改变推进器电机的转速,进而改变推进器的推力,同时通过两个推进器的转速差控制无人船的转向,最终实现无人船的前进和转向操控[17].

|
| 图 1 双推进双体测深无人船“USBV” Figure 1 The catamaran unmanned surface bathymetry vehicle with double propulsion-"USBV" |
无人船控制系统利用控制命令值n(0~200范围内的整数)离散化表征控制电压Vlr,两者线性关系为Vlr=0.025n.在湖试中利用测力计测量不同控制命令下的无人船推力,两个推进器相同控制命令下所产生的推力基本相等,因此可以利用试验数据(见表 1)获得控制命令或控制电压与单推进器推力之间的关系. 表 1的数据显示控制电压与单推进器推力测量值存在明显的线性关系.当试验中控制电压为1.25 V(接近实测的推进器电机启动对应的控制电压1.1 V)时,测量推力值明显偏离整体线性关系.因此,剔除上述测量点后进行线性回归,得到单推进器推力Flr与Vlr的线性关系为:Flr=αVlr.其中,拟合系数α=9.50.对推进器控制器分别施加控制电压Vl和Vr,则产生的推力合力为τ1=α(Vl+Vr),力矩为τ3=αd(Vl-Vr).
| 控制电压 /V |
推力 /N |
控制电压 /V |
推力 /N |
控制电压 /V |
推力 /N |
| 1.25 | 6.4 | 1.75 | 16.2 | 2.25 | 20.0 |
| 2.75 | 27.2 | 3.25 | 31.2 | 3.75 | 36.2 |
| 4.25 | 40.0 | 4.75 | 45.0 | 5.00 | 47.5 |
普通船舶模型辨识工作通常利用试验数据进行全参数辨识[20-21],该方法用于无人船时存在部分参数难以辨识的问题.从影响无人船自动控制及应用的角度考虑,阻力系数是无人船航行的重要水动力参数,对其续航能力起主导作用,且明显影响位点跟踪效果.因此,本研究通过湖试数据对D进行参数辨识,其他参数则通过理论公式计算获得.
下面将利用无人船湖试的稳定航行数据获取D中的3个阻力系数d11、d22和d33.当无人船匀速直线航行时,其所受阻力f与推进器推力合力τ1相等,且满足

| 速度 /(m/s) |
阻力 /N |
速度 /(m/s) |
阻力 /N |
速度 /(m/s) |
阻力 /N |
| 0.26 | 6.3 | 0.31 | 10.0 | 0.46 | 21.3 |
| 0.51 | 27.5 | 0.61 | 33.8 | 0.77 | 47.5 |
| 1.00 | 75.0 |
| 左/右推进器控制器控制电压/V | 速度/kn | 轨迹直径/m | 角速度/(°/s,顺时针为正) |
| 1.25/2.50 | 1.1~1.4 | 12 | -5.7 |
| 2.50/1.25 | 1.2~1.3 | 13 | 5.6 |
| 1.25/3.75 | 1.3~1.6 | 9 | -10.0 |
| 3.75/1.25 | 1.4 | 9 | 9.5 |
| 2.50/3.75 | 1.7~1.8 | 20 | -5.1 |
| 3.75/2.50 | 1.7 | 22 | 5.0 |
| 参数 | 物理值 | 参数 | 物理值 |
| d11 /(kg/m) | 61.8 | X/kg |
-20.0 |
| d22 /(kg/m) | 0 | Y /kg /kg |
-21.6 |
| d33 /(kg·m/rad2) | 40.4 | N/(kg·m/rad) |
-206.2 |
| m/kg | 100 | I/(kg/m) | 20.0 |
基于上述水动力参数,不考虑无人船侧向受力,则双推进双体无人船的三自由度模型水动力方程可简化为
|
(8) |
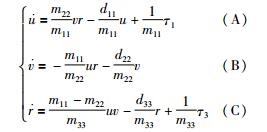
针对双推进双体无人船“USBV”,为了设计稳定的航向控制,将采用转速差控制的方式.设置推进器基础控制电压为V0,控制量为控制电压增量ΔV,通过分别对左/右推进器控制器增减ΔV的方式实现航向控制.此时,控制电压分别为Vl=V0+ΔV和Vr=V0-ΔV,推进器纵向推力合力为τ1=2αV0,力矩为τ3=2αdΔV.则式(8) 可进一步化为
|
(9) |
当无人船运动稳定后满足
在位点跟踪控制器设计时首先进行航向控制器设计,设航向偏差变量Δψ=ψ-ψe,且

|
(10) |
其中,系统矩阵
根据线性系统有限时间时不变LQ问题的基本属性可知,最优控制存在且唯一,u(t)为最优控制的充分必要条件具有形式[14]:
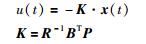
|
(11) |
其中,K为1×2状态反馈矩阵,R为1×1正定矩阵,P为2×2正半定对称矩阵,满足黎卡提微分方程:

|
(12) |
其中,Q为2×2正半定矩阵.
在实际无人船系统中对式(10) 采取离散化处理[22],令采样周期T=1 s,则离散化状态方程为
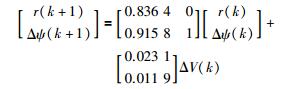
|
(13) |
加权矩阵Q和R的选取至今仍缺少一般和有效的指导原则,通常根据经验确定[14].在本控制器设计中,取Q=[1,0;0,1],R=0.1,并基于Matlab求解黎卡提方程,得到离散LQR控制律为

|
(14) |
则相应的输入控制量ΔV为

|
(15) |
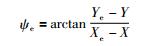
基于上述控制律,可实现航向控制器的设计.位点跟踪控制使得无人船在控制系统的驱动下自动地从初始位点驶向期望位点,并最终到达期望位点一定精度范围内区域.位点跟踪可通过航向跟踪实现,两者主要区别在于位点跟踪的期望航向是根据当前位置和期望位置不断变化的.因此,在每个控制周期,基于无人船当前位点和期望位点并利用LOS投影算法[12]计算得到期望航向ψe,计算公式为
|
(16) |
其中,Xe,Ye和X,Y分别为地球坐标系下期望位点位置和无人船当前位置.将该期望航向作为航向控制器的期望航向输入即可实现位点跟踪控制器的设计.
位点跟踪控制器结构的基本框图如图 2所示.图中,LOS过程表示利用LOS算法计算期望航向ψe,pos(position)过程表示利用k时刻的无人船速度、航向以及采样周期计算位移量ΔX,ΔY,∑过程表示上一时刻相应变量值与其变化量累加得到当前时刻变量值.实际无人船系统中,虚框内的过程可直接通过GPS获取的导航数据得到X,Y.

|
| 图 2 位点跟踪控制器结构基本框图 Figure 2 The diagram of the structure of waypoint tracking controller |
利用Matlab对基于LQR和PID控制方法的位点跟踪控制器进行仿真.设置无人船初始位置(10 m,10 m),目标位置(85 m,65 m),初始速度为0 m/s,初始航向为-45°(设置Y轴正方向为0°,且顺时针为正),无人船航行至目标位置1 m距离范围内停止,得到图 3所示的相关参数仿真结果.其中,对基于PID控制方法的控制器进行仿真时,定义偏差量e(t-2)=ψe(t)-ψ(t-2),e(t-1)=ψe(t)-ψ(t-1) 和e(t)=ψe(t)-ψ(t),则t时刻施加的ΔV值为

|
| 图 3 无人船位点跟踪仿真 Figure 3 USV waypoint tracking simulation |

|
(17) |
其中,kP=0.9,kI=-0.1和kD=2.0分别为经验确定的PID增益系数,ψe(t)为t时刻期望航向,ψ(t-2),ψ(t-1) 和ψ(t)则分别为t-2,t-1和t刻的无人船航向.
位点跟踪仿真航行轨迹图显示,即使初始航向与期望位点方位存在较大偏差,位点跟踪控制器仍控制使无人船航行至期望位点,相比PID控制方法,基于LQR的控制方法更平稳;ΔV受推进器控制器的控制电压所约束,但随着无人船的航行,所设计的控制器中的ΔV能较快地收敛并最终稳定于零值,显示了控制器快速稳定跟踪的优点,而基于PID控制方法的ΔV则无法快速收敛;仿真速度结果则显示无人船速度能快速达到稳定航速,且与输入控制量无关;基于LQR控制方法的仿真航向同样能较快地收敛,而基于PID控制方法的仿真航向则一直存在振荡.此外,图 3(b)至3(d)的结果均显示基于LQR的控制器能使无人船更快速地达到期望位点.总体而言,仿真结果表明本研究设计的位点跟踪控制器可以较好地实现双推进双体无人船的位点跟踪控制,且与传统的PID控制方法相比具有更好的快速性和稳定性.
4 无人船湖试2014年10月~11月在连云港当路水库进行了为期6天的无人船自动航行试验,期间开展了多次单位点和连续多位点跟踪控制的验证试验.试验过程中,无人船系统基于设计的位点跟踪控制器(根据经验对控制律参数进行了微调)和相关导航数据自动调节控制量ΔV,并设置航行至期望位点6 m距离范围内自动转向下一期望位点或自动停船.
在湖试试验中,其中一次单位点跟踪典型试验设置起始位点为(119°14′25.24″E,34°37′25.53″N),期望位点为(119°14′30.64″E,34°37′29.29″N),实际的试验航行轨迹如图 4所示.其中一次多位点跟踪典型试验设置起始位点为(119°14′33.29″E,34°37′25.36″N),10个连续期望位点位置如表 5所示,相应的试验航行轨迹如图 5所示.

|
| 图 4 单位点跟踪试验轨迹图 Figure 4 The single waypoint tracking trajectory |
| 序号 | 期望位点坐标 |
| 1 | (119°14′25.53″E,34°37′25.67″N) |
| 2 | (119°14′27.99″E,34°37′30.94″N) |
| 3 | (119°14′29.38″E,34°37′30.24″N) |
| 4 | (119°14′27.41″E,34°37′25.82″N) |
| 5 | (119°14′28.71″E,34°37′25.53″N) |
| 6 | (119°14′30.64″E,34°37′29.29″N) |
| 7 | (119°14′31.61″E,34°37′28.25″N) |
| 8 | (119°14′30.28″E,34°37′25.64″N) |
| 9 | (119°14′32.22″E,34°37′27.21″N) |
| 10 | (119°14′32.72″E,34°37′25.95″N) |

|
| 图 5 多位点(10个)跟踪试验轨迹图 Figure 5 The multi-waypoint (10 waypoints) tracking trajectory |
单位点和多位点跟踪试验的无人船航行轨迹图显示了较好的自动位点跟踪效果,表明设计的位点跟踪控制器适用于所研发的双推进双体无人船.但另一方面,受无人船航速、角速度以及输入控制量ΔV的约束,当无人船航向与期望位点方位相差较大时,无人船存在相对较大的转弯半径,无法实现较快速的转弯.
5 结论与讨论针对自研发的双推进双体无人船的自动位点跟踪问题,考虑无人船低速航行的情况,将无人船系统近似为一个线性可控系统.基于简化的三自由度无人船动力模型,详细介绍了利用实际湖试数据以及相关理论方程进行模型中相关参数的辨识以及基于LQR理论和LOS算法进行位点跟踪控制器设计的基本原理和过程,并进行了仿真和湖试验证.验证结果显示了较好的跟踪效果,表明了所设计的位点跟踪控制器在双推进式无人船中的适用性.
受模型简化过程中忽略非线性项和外力干扰的影响以及模型参数辨识的限制,本研究中的简化三自由度无人船模型存在一定的局限性.在风、浪、流影响较大的复杂海洋环境中,通常存在较大的非线性,可能导致设计的控制器无法达到理想的控制效果.未来需进一步研究非线性的无人船模型,并继续开展路径跟踪等自动控制算法的研究.
| [1] | Bertram V. Unmanned surface vehicles-a survey[J]. SkibstekniskSelskab, 2008: 1–4. |
| [2] | Manley J E. Unmanned surface vehicles, 15 years of development[C]//Proceedings of the 2008 Oceans MTS/IEEE Quebec Conference and Exhibition. Piscataway, NJ, USA:IEEE, 2008:1-4. http://www.academia.edu/27781540/Exploration_vs._Exploitation_in_Differential_Evolution |
| [3] | Yuh J, Marani G, Blidberg D R. Applications of marine robotic vehicles[J]. Intelligent Service Robotics, 2011, 4: 221–231. DOI:10.1007/s11370-011-0096-5 |
| [4] | Yan R J, Pang S, Sun H B, et al. Development and missions of unmanned surface vehicle[J]. Journal of Marine Science & Application, 2010, 9(4): 451–457. |
| [5] | Yaakob O, Mohamed Z, Hanafiah M. Development of unmanned surface vehicle (USV) for sea patrol and environmental monitoring[J]. Academia Edu, 2012: 20–22. |
| [6] | Wang M. The development of and experiments on an unmanned surface vehicle platform for water sampling and monitoring[D]. Hong Kong:The Hong Kong University of Science and Technology, 2012. http://www.sciencedirect.com/science/article/pii/S1367578816300219 |
| [7] |
金久才, 张杰, 马毅, 等.
一种无人船水深测量系统及试验[J]. 海洋测绘, 2013, 33(2): 53–56.
Jin J C, Zhang J, Ma Y, et al. An unmanned surface vehicle for bathymetry[J]. Hydrographic Surveying and Charting, 2013, 33(2): 53–56. |
| [8] | Cuschieri J. Estimation and measurement of the acoustic signature of unmanned surface and underwater vehicles[J]. Journal of the Acoustical Society of America, 2010, 127(3): 1813. |
| [9] | Do K D, Pan J. Global waypoint tracking control of underactuated ships under relaxed assumptions[C]//Proceedings of the IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 2003:1244-1249. |
| [10] | Lekkas A M, Fossen T I. Integral LOS path following for curved paths based on a monotone cubic hermite spline parametrization[J]. IEEE Transactions on Control Systems Technology, 2014, 99: 1–7. |
| [11] | Pettersen K Y, Lefeber E. Way-point tracking control of ships[C]//Proceedings of the 40th IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 2001:940-945. |
| [12] | Fossen T I, Breivik M, Skjetne R. Line-of-sight path following of underactuated marine craft[C]//Proceedings of the IFAC MCMC'03. Kingstone, USA:IFAC, 2003:1-6. |
| [13] | Moreira L, Fossen T I, Soares C G. Path following control system for a tanker ship model[J]. Ocean Engineering, 2007, 34: 2074–2085. DOI:10.1016/j.oceaneng.2007.02.005 |
| [14] |
郑大钟.
线性系统理论[M]. 第2版. 北京: 清华大学出版社, 2002.
Zheng D Z. Linear system theory[M]. 2nd ed. Beijing: Tsinghua University Press, 2002. |
| [15] | Naeem W, Xu T, Sutton R, et al. The design of a navigation, guidance, and control system for an unmanned surface vehicle for environmental monitoring[J]. Proceedings of the Institution of Mechanical Engineers Part M-Journal of Engineering for the Maritime Environment, 2008, 222(2): 67–79. DOI:10.1243/14750902JEME80 |
| [16] | Sharma S K, Sutton W N R. An autopilot based on a local control network design for an unmanned surface vehicle[J]. Journal of Navigation, 2012, 65(2): 281–301. DOI:10.1017/S0373463311000701 |
| [17] |
金久才, 张杰, 邵峰, 等.
一种海洋环境监测无人船系统及其海洋应用[J]. 海岸工程, 2015, 34(3): 87–92.
Jin J C, Zhang J, Shao F, et al. An unmanned surface vehicle for ocean environment monitoring and its oceanic application[J]. Coastal Engineering, 2015, 34(3): 87–92. |
| [18] | 李长喜. 不完全驱动船舶直线航迹控制系统的研究与设计[D]. 杭州: 浙江工业大学, 2008. Li C X. Research and design of straight-line tracking control systems for underactuatedship[D]. Hangzhou:Zhejiang University of Technology, 2008. http://d.wanfangdata.com.cn/Thesis/Y1341125 |
| [19] | Fossen T I. Handbook of marine craft hydrodynamics and motion control[M]. New York, USA: John Wiley & Sons Ltd, 2011. |
| [20] | Holden C, Fossen T I. A nonlinear 7-DOF model for U-tanks of arbitrary shape[J]. Ocean Engineering, 2012, 45(5): 22–37. |
| [21] | Araki M, Sadat-Hosseini H, Sanada Y, et al. Estimating maneuvering coefficients using system identification methods with experimental, system-based, and CFD free-running trial data[J]. Ocean Engineering, 2012, 51(2): 63–84. |
| [22] |
刘豹, 唐万生.
现代控制理论[M]. 第3版. 北京: 机械工业出版社, 2007.
Liu B, Tang W S. Modern control theory[M]. 3rd ed. Beijing: China Machine Press, 2007. |