



1 引言
随着对海洋资源的不断开发,我们逐渐从浅海域向深海域跃进,并对海上作业的效率和对海洋资源开发的自动化程度提出了更高的要求,从而多艘船舶的协同编队在民用和军事作业的应用也越来越广泛.相比于单艘船舶作业,多艘船舶相互协调作业有着许多潜在的优势:可以提高执行某作业的效率;完成海上比较复杂的任务,而这些任务有可能是单艘船根本无法完成的;可以改善作业的性能;并且能避免操纵员因作业的高难度和长期作业的疲倦感带来的种种影响[1-2].另外,多艘船舶协调作业还具有容错性强和适应性强等优点[3].因此研究船舶的协同编队控制具有很大的实际应用价值,船舶的协同编队控制研究也越来越受到更多学者的关注[4].
船舶之间相互协调必涉及到相互之间的通信,而对于比较复杂的通信网络,经常采用图论来表示,其中图的顶点表示船,图的边表示船舶之间的通信链路.目前关于船舶协同编队控制方法的研究成果越来越多,如Skjetne通过预先定义一个期望的队形参考点,并根据定义的队形参考点定义每艘船舶实现编队时的期望路径,并基于非线性反步法设计相应的编队控制器[5]. Ihle在此基础上,针对每艘船舶规划路径参数不相同的情况,引入了路径参数同步约束函数来保证所有船的路径参数趋于一致,实现了船舶协同编队的分布式控制[6].上述方法都是要求所有船舶之间实现全局通信. Ihle基于无源性理论设计了路径参数的同步控制律[7],该方法不需要船舶实时信息的全局通信.随着一致性理论的不断研究[8-9],Christoffer通过定义队形参考向量将队形控制问题转换为状态的一致性问题,并应用无源性同步理论设计了多船的协同编队控制律[10]. Wang在此基础上研究了参考速度不相同时,通过设计速度的同步控制律来完成协同编队控制器的设计[11].由于同步控制具有简单的控制结构且控制器的实现比较容易[12],常被用于解决编队控制问题,文[13]基于虚拟领航者的策略研究了船舶的无源协同编队控制方法,该方法要求相邻两船实现相互通信且整个通信拓扑图必须为平衡图.而当船舶执行协调作业时,可能因海况恶劣导致通信出现故障,从而导致有些船舶只能接收相邻船发来的信息,却不能保证其发送信息给相邻的船舶.此时的通信拓扑图就是普通的有向图,并非简单的双向或无向图.然而现有的大部分编队方法并不适用于有向通信拓扑结构下的协同编队控制.
近年来,有学者针对更广泛的有向非平衡通信拓扑图的协调控制进行了初步的研究[14-16].如Liu等针对非线性欧拉—拉格朗日系统在有向强连通图下的协调同步控制进行了研究[17].陈刚等研究了在有向强连通拓扑下的无源系统的协调同步控制,并对多机械手系统的协调同步进行了仿真验证[18].针对非线性系统的协同编队控制理论,尤其是有向通信拓扑下的编队控制远未达到成熟. Jiao通过定义一个新的任务空间研究了有向通信拓扑下船舶的无领航者的协同编队控制方法[19].船舶执行协同编队作业时还需要以期望的队形执行协调定位或协调循迹,显然上述这些编队方法并不能直接应用于船舶的协同编队控制,无疑就给船舶的协同编队控制器的设计带来一定的困难.另外,在深海作业时船舶常常需要根据不同的作业需求执行多种工作模式,如定点定位、低速循迹、高速循迹等.对于船舶的协同编队,仍旧会遇到不同的作业模式,如协调定点定位、协调轨迹跟踪、协调路径跟踪、协同编队等,并且要求能够在不同作业模式间相互切换,来完成相应的海上任务,作业模式的改变直接导致控制器的控制目标改变.
针对上述问题,本文提出了一种有向通信拓扑下的任务驱动船舶协同编队控制方法.所提出的方法综合考虑了船舶之间的通信需求和多种作业模式的协同编队.相比于现有文献中的协同编队控制方法,本文所提出的方法只需要船舶相互之间的通信拓扑为有向非平衡通信,即:不需要船舶相互之间实现全局通信,只需要邻近的船舶实现通信即可,且不要求船舶之间的通信为双向通信,通信要求有所降低;另外,本文提出的方法不像现有成果中研究单一作业模式下的协同编队控制方法,而是将任务驱动引入到船舶协同编队作业中,实现了包含多种协调作业模式的协同编队.考虑到船舶在海事作业时常常需要依次执行定位、循迹等作业模式,本文设计了一个通用的协同编队控制器,该控制器可以根据相应任务要求改变相应的期望参考信号,从而得到编队控制器、协调定位控制器、协调跟踪控制器,同时设计了各控制器之间的平滑过渡过程控制器,使得船舶根据不同的作业需求可以激活相应的协调控制器,并且能保证各控制器之间的平滑过渡,从而实现任务驱动的船舶协同编队控制,所提出的算法更接近实际应用.最后,通过仿真实验验证了所提出的任务驱动协同编队控制方法的有效性.
2 问题描述 2.1 船舶数学模型本文以水面船舶为研究对象,为了简化控制器设计通常选用3自由度数学模型.假设船舶在北东坐标系下的北向位置、东向位置和艏向用向量η=[n e ψ]T表示,在船体坐标系下的纵荡速度、横荡速度和回转率用向量v=[u v r]T表示,由文[2],水面船舶的运动学和动力学数学模型一般描述为
|
(1) |
R(ψ)为从船体坐标系到大地坐标系的转换矩阵,其矩阵形式为
|
(2) |
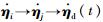
并且有R-1(ψ)=RT(ψ).其中,Mv为包含水动力附加质量的惯性矩阵; Cv为包含附加质量的科里奥利向心力矩阵,有船舶自身和附加质量共同作用产生的,它是由于地球自转运动而作用于地球上运动船舶的偏向力;Dv为阻尼系数矩阵,主要由潜在阻尼、船体表面的摩擦阻尼、波浪的漂移阻尼及漩涡阻尼组成;τv为船舶的执行器给出的外力或力矩输入.
将船舶的数学模型进行变形,得到北东坐标系下的数学模型方程为

|
(3) |
其中:
|
上述北东坐标系下的船舶数学模型有如下的性质:
(1) M(η)是正定对称惯性矩阵且满足λmin(Mi)||x||22≤xTMix≤λmax(Mi)||x||22,∀x≠0;
(2) 


(3) 阻尼矩阵

假设有n艘船舶执行协同编队作业,每艘船舶相应的状态变量用下标i(i=1,2,…,n)来表示.首先分别对每艘船指定各自的队形参考点,定义每艘船在北东坐标系下的位置和对应的队形参考点之间的相对位置向量为:li=[x0i,y0i,ψ0i]T,i=1,2,…,n.船舶自身的实际位置用ηi(t)来表示,根据前面定义的相对位置向量,可以将所有队形参考点的位置表示为:xi=ηi(t)+li,i=1,2,…,n.而队形参考点之间的位置关系可以直接反应船舶之间的队形结构.为了保证船舶协调作业过程中所需要的队形结构,要求协同编队控制律能使所有队形参考点达到同步一致,即:x1=x2=…=xn.相应的队形关系如图 1所示.

|
| 图 1 船舶的队形关系图 Figure 1 The formation relationship of the ships |
如果定义队形参考点的期望轨迹为ηd(t),则船舶实现协调跟踪,需要满足x1=x2=…=xn=ηd(t).如果定义队形参考点期望位置为ηd=[xd,yd,ψd]T,其中xd、yd、ψd分别为常数,则船舶实现协调定位需要满足:x1=x2=…=xn=ηd.显然,协调定位可以看作协调跟踪的一个特例.
3 任务驱动协同编队控制器设计 3.1 协调控制器设计引理1[20] 如果有向图是强连通的,图中节点数为N,该有向图的拉普拉斯矩阵表示为L,则存在一个元素全为正的向量γ使得式子γTL=0成立,其中向量γ定义为γ=[γ1,…,γN]T,γi>0 ∀i∈{1,…,N}.
引理2(Barbalat′s引理)[21] 假设在时间区间[t0,∞)上的一致连续函数w(t):R→R,其积分项
船舶之间的通信拓扑用有向强连通图来表示,首先设计船舶的协同编队控制器,该控制器对于不同的作业任务,通过改变期望状态信号,就可以得到相应任务的协调控制器.不失一般性,本文给出有向通信拓扑下的协调轨迹跟踪控制器的具体设计过程.
定义每艘船的队形参考点的位置跟踪误差为

|
(4) |
对每艘船定义一个新的向量si:
|
(5) |
式中,λi∈R3×3为正定的对角阵.
定义船舶的队形参考点的相对位置误差为

|
(6) |
通过计算,可以得到:
|
(7) |
将每艘船的控制输入选择为
|
(8) |
式中,ki∈R3×3为正定的对角阵,fi为协调控制辅助输入,具有如下形式:
|
(9) |
式中,lij为船舶相互之间的通信拓扑图的拉普拉斯矩阵L的元素. Ni定义为节点i的邻集,即有向图中的通信链路指向节点i的所有节点的集合.
定理1 有n艘船舶执行协同编队作业,如果船舶之间的相互通信拓扑图为有向强连通图,则协调控制律(8) 和(9) 可以保证系统的渐近稳定性,从而保证船舶以期望的队形执行协调轨迹跟踪任务.
证明 由于xi=ηi+li,因此

|
(10) |
注意到,向量
对于所有船舶构成的整个系统,定义李亚普诺夫函数:

|
(11) |
对上式进行求导,可得:
|
(12) |
将式(10) 代入到上式中,可得:
|
(13) |
根据北东坐标系下的船舶数学模型的性质,可知:
|
(14) |
将式(5)、式(9) 代入到上式中,经过计算可得:
|
(15) |
将上式中等式右边的第2项拆成两项,可得:
|
(16) |
对上式进行变形可得:
|
(17) |
经过计算可得:
|
(18) |
定义sTs=[s1Ts1,s2Ts2,…,snTsn]T,则上式可变为
|
(19) |
由于
|
(20) |
由于船舶之间的通信拓扑图为有向强连通图,根据有向强连通图的性质γTL=0.则不等式(20) 可以写为
|
(21) |
由于V是半正定的,而







根据上述分析,如果期望参考信号选为一条轨迹,即ηd(t)=[xd(t),yd(t),ψd(t)]T,每艘船舶实现协调跟踪控制的控制输入则为

|
(22) |
如果将期望参考信号选为一个期望位置,即:ηd=[xd,yd,ψd]T,xd、yd、ψd分别为常数,则每艘船舶实现协调定位的控制输入选为

|
(23) |
同理,船舶实现期望的队形控制的控制输入可选择为

|
(24) |
式中k0∈R3×3为正定的对角矩阵.
根据前面设计的不同作业模式下的协调控制器,基于切换控制的思想将多种作业模式下的协调控制器集成一个整体的协调控制系统.特别强调的是,海事作业中如果先执行协调轨迹跟踪作业,则该模式通过协同编队模式过渡到协调轨迹跟踪模式,这样可以避免船舶之间的相互碰撞;如果先执行协调定位模式,则可以从定位模式过渡到协调轨迹跟踪模式,而不需要经过协同编队模式.
假设协同编队控制器是控制器-1,协调轨迹跟踪控制器是控制器-3,从协同编队控制器到协调轨迹跟踪控制器的切换控制器是控制器-2,协调定位控制器是控制器-5,协调轨迹跟踪控制器和协调定位控制器相互之间的切换控制器是控制器-4.整个集成的协调控制系统的结构图如图 2所示.监督模块负责根据相应的指令或者DP操纵员直接发的指令选择相应作业模式下的协调控制器,从而完成相应的协调任务.两种作业模式下的协调控制器之间可以通过设计额外的滑动控制器完成作业模式的平滑过渡,其中该控制器包含前面两个控制器.

|
| 图 2 集成的协调控制系统的结构图 Figure 2 The block diagram of integrated coordinated control system |
为了实现从编队控制器到协调轨迹跟踪控制器的平缓过渡,定义一个权值函数α,该权值函数需要满足以下3个条件:
a.当任意两艘船舶的队形参考点之间的位置同步误差eij=xj-xi→0时,α→1成立;
b.当任意两艘船舶的队形参考点之间的位置同步误差eij=xj-xi的值比较大时,α→0成立;
c.权值函数α变化缓慢.
将所有船舶的队形参考点之间的位置同步误差写成向量的形式e.定义船舶之间相互通信的拓扑图的邻接矩阵为A,则可以定义从协同编队控制器到协调轨迹跟踪控制器的过渡函数为

|
(25) |
从而可得从协同编队控制器到协调跟踪控制器的过渡过程的控制律为

|
(26) |
为了实现从协调轨迹跟踪和协调定位控制器之间的平缓过渡,定义一个权值函数σ,该权值函数需要满足以下3个条件:
a.当其中的一种模式下的控制器开始工作时,σ→1;
b.当现有的控制器暂停工作,而另外一种模式的控制器开始工作时,σ→0;
c.权值函数σ变化缓慢.
不失一般性,设计从协调轨迹跟踪控制到协调定位控制的过渡函数为

|
(27) |
其中,

|
(28) |
根据前面控制器的设计过程可知,每个任务模式下的控制器都是稳定的.控制器之间的过渡过程是通过设计平滑过渡函数实现的,所以过渡过程控制器也是稳定的.
4 仿真分析验证本节通过仿真实验验证了所提出的任务驱动协同编队控制方法的有效性,该实验中采用的船舶模型参数为
|
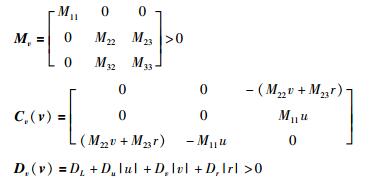
所有船舶的模型系数的具体数值都参见文[10].实验中船舶相互之间的通信拓扑图为有向强连通图,如图 3所示.

|
| 图 3 船舶相互之间的通信拓扑图 Figure 3 The communication topology graph of these ships |
该有向强连通图的拉普拉斯矩阵为
|
显然,该拉普拉斯矩阵并不是对称的.由于该通信拓扑图是有向强连通图,所以存在一个元素全为正的向量γ使得式子γTL=0成立,此处向量γT=[3 1 3 3 3].
所有船舶的初始位置分别设定为

为了方便仿真验证,实验中用时间间隔代替操纵员指令,设计权值函数实现不同模式间的平滑切换.假设目标任务要求:当t < 1 000 s时船舶从任意初始位置执行协调轨迹跟踪,该过程包含从协同编队到协调轨迹跟踪的过渡,当船舶相互之间形成期望的队形结构,即eij→0时,α→1,从而τfti=(1-α(eTAe))τfi+α(eTAe)τti→τti,此时控制器就发生切换,协调跟踪控制器被激活;当t=1 000 s时开始执行协调定位,船舶的航行速度开始下降,直到权值函数满足σ→1时,τtpi=σ(U)τpi+(1-σ(U))τti→τpi,此时控制发生切换,协调定位控制器被激活,直至t=1 700 s;从t>1 700 s,船舶继续执行协调轨迹跟踪,此时船舶的航行速度开始增大,直到权值函数满足σ→0时,τtpi=σ(U)τpi+(1-σ(U))τti→τti,此时控制器发生切换,协调跟踪控制器被激活,直至仿真结束.整个过程包括协同编队、协调轨迹跟踪和协调定位三种工作模式,试验中将船舶协调作业分为7个阶段:
阶段1 执行协同编队,使船舶形成期望的队形;
阶段2 执行从协同编队到协调轨迹跟踪的平滑过渡;
阶段3 执行协调轨迹跟踪;
阶段4 执行从协调轨迹跟踪到协调定位的平滑过渡;
阶段5 执行协调定位;
阶段6 执行从协调定位到协调轨迹跟踪的平滑过渡;
阶段7 执行协调轨迹跟踪.
船舶在有向通信拓扑图下的任务驱动协同编队控制的仿真结果如下:
图 4为船舶形成直线型队形结构执行多作业模式的平面运动曲线,任务驱动下船舶协调作业时的北向位置变化曲线如图 5所示,东向位置变化曲线如图 6所示,艏向变化曲线如图 7所示,上述几个仿真图表明,通过所提出的协调控制算法可以实现包含多种作业模式的协调任务,且所有船舶可以实现不同作业模式间的相互平滑过渡,即过渡过程中船舶的位置和艏向的变化都比较平缓;任务驱动下的协调作业所对应的各艘船舶的纵荡速度、横荡速度和回转率变化曲线分别如图 8~图 10所示,由图 8~图 10可知,不论执行哪种协调作业,船舶的速度都趋于同步,并且过渡过程中船舶的速度变化也比较平缓.

|
| 图 4 船舶的平面运动曲线 Figure 4 Plane motion curve of the ships |

|
| 图 5 船舶的北向位置变化 Figure 5 North position change of the ships |

|
| 图 6 船舶的东向位置变化 Figure 6 East position change of the ships |

|
| 图 7 船舶的艏向变化 Figure 7 Heading change of the ships |

|
| 图 8 船舶的纵荡速度变化 Figure 8 Surge velocity change of the ships |

|
| 图 9 船舶的横荡速度变化 Figure 9 Sway velocity change of the ships |

|
| 图 10 船舶的回转率变化 Figure 10 Yaw velocity change of the ships |
综上所述,多艘船舶的相互通信拓扑图为有向强连通图时,通过本文提出的任务驱动协同编队控制方法可以实现多作业模式下的协调作业,并且在作业模式发生改变时,船舶的位置、艏向、速度变化曲线都比较平缓,这样更利于在实际工程中应用.
5 结论多艘船舶在恶劣海况时,船舶之间的相互通信可能出现故障,此时船舶之间往往不能保证全局通信,甚至不能保证通信拓扑是平衡图,针对该问题,本文提出了通信拓扑为更一般的非平衡有向图下任务驱动的船舶协同编队控制算法,该算法设计了一个通用的协调控制器,可以根据海事作业任务得到相应的作业模式下的协调控制器.同时,考虑到船舶的惯性比较大,且在实际海事中往往需要根据相应任务需要在不同的作业模式间切换,本文还设计了不同协调作业模式间的平滑过渡过程协调控制器,从而保证船舶可以根据任务调用相应的协调控制器,并保证协调控制器之间的平滑过渡,从而实现了任务驱动下的船舶协同编队控制.最后,通过仿真试验验证了所提出的任务驱动的协同编队控制算法的有效性.
| [1] | Murray R M. Recent research in cooperative control of multi-vehicle systems[J]. Journal of Dynamic Systems, Measurement, and Control, 2007, 129(5): 571–583. DOI:10.1115/1.2766721 |
| [2] | Fossen T I. Handbook of marine craft hydrodynamics and motion control[M]. Hoboken, NJ, USA: John Wiley & Sons Ltd, 2011. |
| [3] |
闵海波, 刘源, 王仕成, 等.
多个体协调控制问题综述[J]. 自动化学报, 2012, 38(8): 1557–1570.
Min H B, Liu Y, Wang S C, et al. An overview on coordination control problem of multi-agent system[J]. Acta Automatica Sinica, 2012, 38(8): 1557–1570. |
| [4] | Oh K K, Park M C, Ahn H S. A survey of multi-agent formation control[J]. Automatica, 2015, 53(2): 424–440. |
| [5] | Skjetne R, Moi S. Nonlinear formation control of marine craft[C]//Proceedings of IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 2002:1699-1704. |
| [6] | Ihle I F, Skjetne R, Fossen T I. Nonlinear formation control of marine craft with experimental results[C]//Proceedings of IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 2004:680-685. |
| [7] | Ihle I F, Arcak M, Fossen T I. Passivity-based designs for synchronized path-following[J]. Automatica, 2007, 43(2): 1508–1518. |
| [8] | Ren W. Multi-vehicle consensus with a time-varying reference state[J]. Systems and Control Letters, 2007, 56(2007): 474–483. |
| [9] | Min H, Sun F, Wang S, Li H. Distributed adaptive consensus algorithm for networked Euler-Lagrange systems[J]. IET Control Theory and Applications, 2011, 5(1): 145–154. DOI:10.1049/iet-cta.2009.0607 |
| [10] | Christoffer F L, Skjetne R. Formation control of fully-actuated marine vessels using group agreement protocols[C]//Proceedings of IEEE Conference on Decision and Control and European Control Conference. Piscataway, NJ, USA:IEEE, 2011:4132-4139. |
| [11] | Wang Y, Yan W, Li J. Passivity-based formation control of autonomous underwater vehicles[J]. IET Control Theory Application, 2012, 46(4): 518–525. |
| [12] |
邵浩宇, 胡爱花.
基于事件驱动控制的非线性多智能体的一致性[J]. 信息与控制, 2015, 44(1): 38–42.
Shao H Y, Hu A H. Consensus of nonlinear multi-agent systems with event-triggered control[J]. Information and Control, 2015, 44(1): 38–42. |
| [13] |
付明玉, 焦建芳.
基于虚拟领航者的船舶无源协调编队控制研究[J]. 自动化学报, 2014, 40(3): 439–448.
Fu M Y, Jiao J F. Passive coordinated formation control for vessels based on virtual leader[J]. Acta Automatica Sinica, 2014, 40(3): 439–448. |
| [14] |
俞辉, 王永骥, 程磊.
基于有向网络的智能群体群集运动控制[J]. 控制理论与应用, 2007, 24(1): 79–83.
Yu H, Wang Y J, Cheng L. Flocking motion control of flock in directed networks[J]. Control Theory & Applications, 2007, 24(1): 79–83. |
| [15] |
谭拂晓, 关新平, 刘德荣.
非平衡拓扑结构的多智能体网络系统一致性协议[J]. 控制理论与应用, 2009, 26(10): 1087–1092.
Tan F X, Guan X P, Liu D R. Consensus protocol in networked multi-agent systems with non-balanced topology[J]. Control Theory & Applications, 2009, 26(10): 1087–1092. |
| [16] | Ren W. Consensus tracking under directed interaction topologies:Algorithms and experiments[J]. IEEE Transactions on Control Systems Technology, 2010, 18(1): 230–237. DOI:10.1109/TCST.2009.2015285 |
| [17] | Liu Y, Chopra N. Synchronization of networked robotic systems on strongly connected graphs[C]//Proceedings the 49th IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 2010:3194-3199. |
| [18] |
陈刚, 余名.
分布式无源性系统的同步控制与分析[J]. 自动化学报, 2012, 38(5): 882–888.
Chen G, Yu M. Synchronizing control and analysis of distributed passive systems[J]. Acta Automatica Sinica, 2012, 38(5): 882–888. |
| [19] | Jiao J, Liu W. Guided leaderless coordinated formation algorithm for multiple surface vessels[J]. Journal of the Franklin Institute, 2015, 352(9): 3843–3857. DOI:10.1016/j.jfranklin.2015.01.019 |
| [20] | Horn R A, Johnson C R. Matrix analysis[M]. Cambridge, UK: Cambridge University Press, 1985. |
| [21] | 斯洛坦. 应用非线性控制[M]. 程代展, 译. 北京: 机械工业出版社, 2006. Slotine J E. Application of nonlinear control[M]. Cheng D Z, trans. Beijing:Mechanical Industry Press, 2006. |