



1 引言
在实际生产过程中,由于异步电机参数、负载的不对称性,检测、采样电路的不准确性以及调速系统运行过程中的动态特性,使异步电机的磁场大多数都呈椭圆形,因此,常规工况下磁链观测的电压、电流模型不能有效地估算异步电机转子磁链[1].李彪等应用电压模型的新算法,对永磁同步电机控制系统的定子侧磁链进行观测,可以有效估算椭圆形磁场,但无法克服低速时估算不准确或无法正常工作的缺陷[2-3].为了改善电压模型所固有的纯积分器问题,很多学者针对这一问题提出改进方法[4-6].用一阶低通滤波器对电压模型的结构进行改造是常见的改进方法,可以有效地消除磁链观测的纯积分器问题,但其稳态性能较差,影响磁链的辨识精度[7-8].基于扩展卡尔曼滤波器、神经网络观测器和滑模观测器等的矢量控制系统研究[9-11],可以提高系统的运行性能,并且受异步电机参数变化影响较小,但存在结构复杂、计算量大的缺点,降低了实际生产应用的易行性和可靠性[12-20].针对以上问题,本文进行了以下研究工作.
将带通滤波器(BPF)串联到纯积分器的输出端,并且通过输出反馈的方法,补偿串入带通滤波器带来的稳态幅值相位误差.这种方法的优点在于可以更准确地观测实际工况中存在的不规则形磁场.同时,为了解决此算法在低速时估算误差增大,静止时失效的缺点,本文提出将此算法和磁链观测的电流模型相结合,根据转子速度的大小做出相应判断,使其在低速运行和高速运行的场合相互切换,从而达到高精度、全速度转子磁链观测的目的.最后,将磁链观测的组合模型应用于异步电机的矢量控制仿真中,验证了算法的简单易行性和运行可靠性.将组合模型观测器应用于异步电机矢量控制系统的实验中,并利用德州仪器的TMS320F2812DSP对组合模型磁链观测算法进行实验,证明了组合模型磁链观测器的实用性.
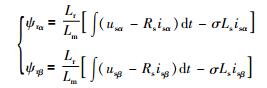
2 电压模型假设研究对象采用的异步电机,电机磁动势沿气隙圆周是正弦分布的,磁路是线性的,并且忽略铁损的影响.异步电机转子磁链的电压模型方程为
|
(1) |
式中,Lr、Ls、Lm分别为转子电感、定子电感、定转子互感,Rs为定子电阻;σ为漏磁系数,σ=1-Lm2/(LsLr).
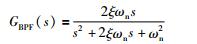
以异步电机磁链电压方程的α分量为例进行分析,其结构框图如图 1所示,首先经过纯积分器的积分环节,其输出存在初始相位误差和直流偏置误差,后面串入的带通滤波器,可以抵消纯积分器在原点处的极点,彻底消除纯积分引起的初始相位误差,而输出的反馈环节是对直流偏置误差的弥补.其中,GBPF是带通滤波器的传递函数,表达式如式(2) 所示,b为常数,ωr为转子角频率.

|
| 图 1 电压模型改进原理框图 Figure 1 The improvement principle of the voltage model |
|
(2) |
式中,ξ为带通滤波器的阻尼系数;取ωn=kωr作为中心频率,其中k值的选取决定系统整体的磁链观测性能.
由图 1可得算法的闭环部分传递函数为

|
(3) |
在这里,带通滤波器的串如会使系统产生稳态误差,可以通过选取适当的b值作为反馈系数对系统误差进行补偿.使上面的传递函数与纯积分器构建等式,从而使系统和纯积分器具有相同的频率特性为
|
(4) |
由以上公式可得算法的反馈系数为
|
(5) |
针对异步电机转子磁链观测的新算法,它不依赖于α、β两相的对称性,即对现实更多存在的椭圆形磁链可以准确观测,同时也降低了传统工况下磁链观测电压模型在实际应用中存在初始相位和直流偏置问题的影响.
3 组合式转子磁链观测器仿真结果证明,改进的电压模型在高速运行中对磁链具有良好的观测效果,但是在低速运行中,由于纯积分器的影响,观测效果依然不精确,当电机静止时,算法无法正常工作.异步电机转子磁链的电流模型方程为
|
(6) |
电流模型具有良好的低速观测效果,因此,本文提出将电流、改进的电压模型相结合,以解决系统在低速运行时存在磁链估算误差的缺陷.在异步电机转子磁链观测器的组合式模型中,改进的电压、电流模型相辅相成,适时切换.在低速运行阶段电流模型被使能,从而弥补了电压模型的缺陷;在高速阶段改进的电压模型处于工作状态,消除了电流模型在高速阶段受转子参数影响严重的不足.而两者之间的自由平滑切换,本文采用一个以转速为变量的分段函数f(ωr),当转速达到某一适当的值时,对组合模型磁链观测器进行适时调节.在组合式转子磁链观测器中,异步电机转子磁链的估算公式为
|
(7) |
式中,f(ωr)为分段函数,ψrαc、ψrβc分别为异步电机转子磁链电流模型估算结果的α、β分量,ψvrα、ψvrβ分别为异步电机转子磁链电压模型估算结果的α、β分量.
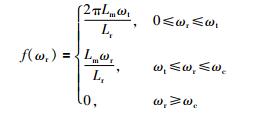
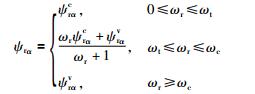
分段函数f(ωr)的选取应保证新转子磁链观测器在特定的某一速度将两个模型正常切换,并保证在切换过程的平滑性,因此,分段函数f(ωr)的设计分为低速阶段、平滑过渡阶段、高速阶段三个部分,其函数表达式为
|
(8) |
式中,ωt、ωc为3个部分的切换边界值,以保证改进的电压模型和电流模型的相互切换与过度.
下面以异步电机转子磁链的α分量为例进行分析,当转速ωr达到不同的转速值时,转子磁链组合模型的估算结果为
(1) 当0≤ωr≤ωt时,将公式
|
(9) |
又异步电机在低速运行时

|
(10) |
上式表明,当异步电机运行在低速阶段,电流模型切换到工作状态,磁链的估算值为电流模型的输出.
(2) 当ωt≤ωr≤ωc时,将公式
|
(11) |
由上式可得,磁链的估算值为ωr、ψrαc、ψvrα的函数,从而保证了两种模型的切换平滑过渡.
(3) 当ωr≥ωc时,将公式f(ωr)=0代入式(7) 中,计算得:

|
(12) |
上式表明,当异步电机运行在高速阶段,电压模型观测器切换为工作状态,磁链的估算值为电压模型的估算结果.
最后,由以上磁链的估算表达式(10)~(12) 可得,异步电机转子侧磁链的α分量估算结果为
|
(13) |
通过以上分析可知,组合式转子磁链观测器集中了电压、电流模型两者的优点,既避免了电压模型在低速运行时存在估算不准的缺陷,又克服了电流模型受电机系统参数影响的不足,从而实现系统在宽速度范围内更好的磁链观测结果.组合式异步电机转子侧磁链估算的结构框图如图 2所示,分段函数f(ωr)的使用,使得两个模型相互切换的过程得以简化,从而使后续模型搭建和仿真运行过程变得更加简单有效.

|
| 图 2 组合式转子磁链观测器结构框图 Figure 2 Structure diagram of the rotor flux observer for combined model |
为了验证组合模型在异步电机矢量控制系统中转子磁链观估算的可行性和可靠性,在Matlab/Simulink仿真平台中搭建异步电机的磁链观测组合式模型,如图 3所示,并对模型进行仿真运行研究.

|
| 图 3 组合式转子磁链估算仿真模型 Figure 3 Simulation model of rotor flux observer based on combined model |
仿真的对象为三相异步电机,电机的额定电压给定为380 V,频率给定为50 Hz,极对数为2,定子电阻为0.435 Ω,转子电阻为0.816 Ω,互感为0.069 3 H,定、转子绕组漏感均为0.02 H.仿真结果分析如下:
在改进的电压模型中,取带通滤波器的参数为k=0.4,ξ=0.5;由图 4电流模型的仿真图可知,电流模型的低速性能优良,但在0.1 s后磁链的观测效果开始明显下降,此时取异步电机转子角速度为65 rad/s,由图 5改进的电压模型仿真图可知,基于新算法的磁链估算电压模型的仿真波形在0.2 s以后的高速度阶段性能表现良好,磁链的估算值曲线可以良好地跟随参考值曲线,此时取转子角速度125 rad/s.通过以上分析,分段函数f(ωr)的参数取ωt=65 rad/s,ωc=125 rad/s.

|
| 图 4 电流模型估算结果与参考磁链的对比 Figure 4 Comparison of the results between the current model estimation and the reference flux |

|
| 图 5 改进的电压模型估算结果与参考磁链的对比 Figure 5 Comparison between the improved voltage model estimation results and the reference flux |
组合模型转子磁链估算仿真结果与参考磁链的对比如图 6所示,由图可知,组合模型融合了电流模型和改进的电压模型,同时拥有两者的优点,因此,使异步电机矢量控制系统的组合式观测模型具有全速度准确估算转子磁链的优良性能.

|
| 图 6 组合式观测器估算结果与参考磁链的对比 Figure 6 Comparison of between the estimated results of the estimation model and the reference flux |
在Matlab/Simulink仿真平台中继续搭建磁链估算的电流模型、改进的电压模型和组合式观测器与参考值之间的估算值误差仿真,仿真结果如图 7所示.仿真结果表明,组合式磁链观测器在低速运行阶段使用电流模型估算磁链结果,在高速运行阶段改进的电压模型进入工作状态,仿真误差分别与两者磁链估算误差曲线重合;而在0.1 s~0.2 s的过度阶段,磁链估计值为两种模型的函数,误差仿真结果也在两者估算误差曲线之间,这保证了两种磁链估算模型的平稳切换,从而使组合模型在电机运行全速度范围的转子磁链估计值更加准确.

|
| 图 7 各算法的磁链估算误差对比(准时切换) Figure 7 Comparison of the flux estimation error of each algorithm (switch on time) |
以上分析,给出了选取切换时间的仿真实验方法,当切换时间为0.1~0.2 s时,由图 7可知满足系统的要求.为了验证这种方法的可行性,进行以下仿真研究:当切换时间提前,即选为0.05 s~0.15 s时,计算可得边界切换角速度分别为29.5 rad/s和96 rad/s,因此分段函数f(ωr)的参数取ωt=29.5 rad/s,ωc=96 rad/s.如图 8所示,组合模型的误差仿真曲线在转子速度达到29.5 rad/s时提前进入过渡阶段,并且显著偏离电流模型的误差曲线;当转速增加到时96 rad/s切换过渡过程结束,而组合模型的误差过早收敛到接近0,此时偏离电压模型的误差曲线也较大.因此,切换时间提前会影响系统的平滑过渡.

|
| 图 8 各算法的磁链估算误差对比(提前切换) Figure 8 Comparison of the flux estimation error of each algorithm (switch ahead) |
当切换时间滞后,即选为0.15~0.25 s时,计算可得边界切换角速度分别为96 rad/s和143.5 rad/s,因此分段函数f(ωr)的参数取ωt=96 rad/s,ωc=143.5 rad/s.如图 9所示,系统在进入和退出切换过渡过程时都比较平稳,但是由于过渡时间的滞后,组合模型在转速为96 rad/s以前的一段时间内无法避免由电流模型误差增大引起的磁链观测误差;而在0.2 s时,即转速为125 rad/s,电压模型的误差已经收敛到0附近,系统不会及时响应.因此,切换时间滞后失去了电压、电流模型相互切换的意义.

|
| 图 9 各算法的磁链估算误差对比(滞后切换) Figure 9 Comparison of the flux estimation error of each algorithm (delay switching) |
定义max Δψ为过渡过程中组合模型的最大观测误差;Δψ-Δψc为进入切换时组合模型与电流模型观测误差的差值;Δψ-Δψv为退出切换时组合模型与电压模型观测误差的差值,各参数值单位均为Wb.并由Δψ-Δψc和Δψ-Δψv的值来判定系统切换过程的平滑性.由仿真分析可得过渡过程各算法的磁链观测误差如表 1所示,可知根据仿真实验方法确定的切换过程是合理的,提前切换和滞后切换都存在不足.
| 过渡过程误差分析 | max Δψ | 进入切换 Δψ-Δψc |
退出切换 Δψ-Δψv |
| 准时切换 | 0.015 6 | 0.015 2 | 0.007 7 |
| 提前切换 | 0.072 4 | 0.185 6 | 0.024 2 |
| 滞后切换 | 0.012 0 | 0.008 2 | 0.010 2 |
由以上仿真实验可得:组合模型利用电压、电流模型的准时切换,有效地提高了转子磁链观估算的准确性;通过仿真实验的方法确定系统的切换时间,得到分段函数f(ωr)的参数ωt、ωc是可行的和相对准确的.
5 实验验证实验平台的搭建基于三相异步电机的矢量控制策略,其结构框图如图 10所示,采用速度、电流双闭环结构,由本文研究的组合式磁链观测器对电机的转子位置进行实时估算,并使用德州仪器的TMS320F2812DSP实现控制算法.基于转子磁场定向的异步电机控制,其关键问题是获得准确的转子位置,再通过坐标变换,使异步电机调速系统像直流电机一样拥有优秀的控制特性.

|
| 图 10 基于组合模型的矢量控制结构框图 Figure 10 Structure diagram of the vector control based on the combined model |
实验的对象为实验室用三相异步电机,电机额定功率为100 W,三相交流额定电压为380 V,额定电流为0.66 A,额定转速为1 420 r/min.实验的过程及结果分析如下:
图 11为500 r/min、空载条件下电压模型磁链观测器和组合模型磁链观测器运行时,a相电流波形的对比.由实验结果可知,组合模型磁链观测器运行时,异步电机a相电流波形更加平滑,电机运行更平稳.

|
| 图 11 a相电流对比实验结果 Figure 11 Experimental results of a phase current comparison |
为了验证组合模型磁链观测器在速度阶跃变化情况下的有效性,图 12为电机转速在500 r/min~1 200 r/min之间跃变时,电机转速估算值波形和a相电流波形.由实验结果可知,当电机转速跃变时,电机的电流迅速做出响应,使电机具有良好的动态性能.

|
| 图 12 转速估算和a相电流实验结果 Figure 12 Speed estimation and a phase current experimental results |
图 13为电机转速在500 r/min~1 200 r/min之间跃变时的电机转速估算值波形和转子位置波形.

|
| 图 13 转速估算和转子位置实验结果 Figure 13 Speed estimation and rotor position experimental results |
为了验证组合式磁链观测器对电机转子位置估计的有效性,在500 r/min、空载条件下,图 14为光电编码器和组合式磁链观测器对电机转子位置估算的对比波形.由实验结果可知,组合模型具有良好的转子位置估算精度,从而验证了组合模型磁链观测器的实际可行性.

|
| 图 14 转子位置对比实验结果 Figure 14 The experimental results of the rotor position comparison |
磁链观测器的电压模型由两相正交的α、β分量推导得出,由于自身电机参数的不对称性及外部条件的不对称性,使得传统电压模型的磁链估算存在稳态误差.电压的改进模型不依赖于α、β两相的对称性,可以准确地估算椭圆形磁场.针对电压的改进模型在电机低速运行时存在缺陷,基于转子速度的分段函数,使得改进的电压、电流模型在系统运行时可以有效地平滑切换过渡,两者工作互不影响.仿真结果表明,组合模型转子磁链观测器继承了异步电机转子磁链观测的简单有效性,提高磁链估算精度的同时兼具工程实用性,适合宽调速范围运行的异步电机磁链观测,从而易于工程实现与应用.
| [1] |
李红, 罗裕, 韩邦成, 等.
带通滤波器法电压积分型定子磁链观测器[J]. 电机与控制学报, 2013, 17(9): 8–16.
Li H, Luo Y, Han B C, et al. Voltage integral model for stator flux estimator based on band-pass filter[J]. Electric Machines and Control, 2013, 17(9): 8–16. |
| [2] |
李彪, 李黎川.
新型磁链观测算法及其在永磁同步电机无位置传感器控制中的应用[J]. 西安交通大学学报, 2015, 49(11): 102–109.
Li B, Li L C. New flux estimation algorithms for position sensorless control of permanent magnet synchronous motors[J]. Journal of Xi'an Jiaotong University, 2015, 49(11): 102–109. DOI:10.7652/xjtuxb201511017 |
| [3] | Li B, Li L. New integration algorithms for flux estimation of AC machines[C]//2011 International Conference on Electrical Machines and Systems (ICEMS). Piscataway, NJ, USA:IEEE, 2011:1-5. |
| [4] |
宋文祥, 阮智勇, 周杰, 等.
改进的感应电机静态补偿电压模型及低速性能分析[J]. 中国电机工程学报, 2013(30): 81–89.
Song W X, Ruan Z Y, Zhou J, et al. Low-speed performance analysis of a modified statically compensated voltage model for induction motors[J]. Proceedings of the CSEE, 2013(30): 81–89. |
| [5] |
陆文斌, 姚文熙, 吕征宇.
基于改进闭环磁链观测器的感应电机无速度矢量控制[J]. 电工技术学报, 2013, 28(3): 148–153.
Lu W B, Yao W X, Lü Z Y. Parameter sensitivity analysis of two kinds of flux observer for induction motor[J]. Transactions of China Electrotechnical Society, 2013, 28(3): 148–153. |
| [6] |
姜宏丽, 宗伟, 刘其辉, 等.
改进电压模型的异步电机无速度传感器矢量控制[J]. 电气传动, 2015, 45(2): 8–12.
Jiang H L, Zong W, Liu Q H, et al. Speed sensorless vector control of induction motor on improved voltage model[J]. Electric Drive, 2015, 45(2): 8–12. |
| [7] | Lee S S, Kim J H, Park B G, et al. Sensorless induction motor control with improved stator flux estimator by programmable LPF[C]//38th Annual Conference on IEEE Industrial Electronics Society. Piscataway, NJ, USA:IEEE, 2012:1993-1998. |
| [8] |
刘洋, 史黎明, 赵鲁, 等.
一种基于混合型磁链观测器的异步电机直接转矩控制[J]. 电工技术学报, 2015, 30(10): 157–163.
Liu Y, Shi L M, Zhao L, et al. Direct torque control of asynchronous motor based on hybrid flux observer[J]. Transactions of China Electrotechnical Society, 2015, 30(10): 157–163. DOI:10.3969/j.issn.1000-6753.2015.10.022 |
| [9] |
李宁, 李亚光, 王宏兴, 等.
分数阶永磁同步电机混沌系统模糊跟踪控制[J]. 信息与控制, 2016, 45(1): 8–13.
Li N, Li Y G, Wang H X, et al. Fuzzy tracking control for fractional-order permanent magnet synchronous motor chaotic system[J]. Information and Control, 2016, 45(1): 8–13. |
| [10] |
陈振, 刘向东, 靳永强, 等.
采用扩展卡尔曼滤波磁链观测器的永磁同步电机直接转矩控制[J]. 中国电机工程学报, 2008, 28(33): 75–81.
Chen Z, Liu X D, Jin Y Q, et al. Direct torque control of permanent magnet synchronous motors based on extended Kalman filter observer of flux linkage[J]. Proceedings of the CSEE, 2008, 28(33): 75–81. DOI:10.3321/j.issn:0258-8013.2008.33.013 |
| [11] |
陆华才, 提娟, 刘怡君, 等.
基于模糊滑模观测器的PMLSM无传感器控制[J]. 信息与控制, 2016, 45(1): 60–65.
Lu H C, Ti J, Liu Y J, et al. Sensorless control for the PMLSM based on fuzzy sliding mode observer[J]. Information and Control, 2016, 45(1): 60–65. |
| [12] | Zhang Z, Tang R, Bai B, et al. Novel direct torque control based on space vector modulation with adaptive stator flux observer for induction motors[J]. IEEE Transactions on Magnetics, 2010, 46(8): 3133–3136. DOI:10.1109/TMAG.2010.2051142 |
| [13] |
黄苏融, 何栋林, 王爽, 等.
基于扩展Kalman滤波器的永磁同步电机转动惯量辨识研究[J]. 电机与控制应用, 2015, 42(12): 7–11.
Huang S R, He D L, Wang S, et al. Research on Inertia identification of permanent magnet synchronous motor based on extend Kalman filter[J]. Electric Machines and Control Application, 2015, 42(12): 7–11. DOI:10.3969/j.issn.1673-6540.2015.12.002 |
| [14] |
邱腾飞, 温旭辉, 赵峰, 等.
永磁同步电机永磁磁链自适应观测器设计方法[J]. 中国电机工程学报, 2015(9): 2287–2294.
Qiu T F, Wen X H, Zhao F, et al. Design strategy of permanent magnet flux linkage adaptive observer for permanent magnet synchronous motor[J]. Proceedings of the CSEE, 2015(9): 2287–2294. |
| [15] |
韦文祥, 刘国荣.
基于扩展状态观测器模型与定子电阻自适应的磁链观测器及其无速度传感器应用[J]. 中国电机工程学报, 2015, 35(23): 6194–6202.
Wei W X, Liu G R. Sensorless control with flux observer based on parallel stator resistance adaptation and extended state observer model[J]. Proceedings of the CSEE, 2015, 35(23): 6194–6202. |
| [16] |
黄进, 赵力航, 刘赫.
基于二阶滑模与定子电阻自适应的转子磁链观测器及其无速度传感器应用[J]. 电工技术学报, 2013, 28(11): 54–61.
Huang J, Zhao L H, Liu H. Sensorless control with resistance variation approach based on parallel MRAS and second-order sliding mode observer[J]. Transactions of China Electrotechnical Society, 2013, 28(11): 54–61. DOI:10.3969/j.issn.1000-6753.2013.11.008 |
| [17] |
邓歆, 张广明, 王德明, 等.
基于全阶模型的异步电机磁链观测收敛性分析与对策[J]. 电工技术学报, 2015, 30(1): 61–71.
Deng X, Zhang G M, Wang D M, et al. Convergence analysis and corresponding strategy of full model based induction motor flux observation[J]. Transactions of China Electrotechnical Society, 2015, 30(1): 61–71. |
| [18] | Zaky M S, Khater M M, Shokralla S S, et al. Wide-speed-range estimation with online parameter identification schemes of sensorless induction motor drives[J]. IEEE Transactions on Industrial Electronics, 2009, 56(5): 1699–1707. DOI:10.1109/TIE.2008.2009519 |
| [19] |
刘洋, 史黎明, 赵鲁, 等.
一种基于混合型磁链观测器的异步电机直接转矩控制[J]. 电工技术学报, 2015, 30(10): 157–163.
Liu Y, Shi L M, Zhao L, et al. Direct torque control of asynchronous motor based on hybrid flux observer[J]. Transactions of China Electrotechnical Society, 2015, 30(10): 157–163. DOI:10.3969/j.issn.1000-6753.2015.10.022 |
| [20] |
周扬忠, 毛洁.
基于有效磁链概念的永磁同步电动机新型定子磁链滑模观测器[J]. 中国电机工程学报, 2013, 33(12): 152–158.
Zhou Y Z, Mao J. A novel sliding mode stator flux linkage estimator based on active flux principle for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2013, 33(12): 152–158. |