



1 引言
随着系统复杂性和所处环境的恶劣程度的增加,系统发生故障的几率也在不断提升.这不仅会影响到系统的动态性能,甚至其稳定性也难以得到保障.所以故障系统下的容错控制问题引起了广泛的关注.由于被动容错控制的保守性问题,基于故障检测的主动容错控制更是成为了广大学者的研究热点[1-4].
近年来,各种基于故障诊断的主动容错控制方法已经被运用到工程或理论研究领域.其中基于鲁棒控制算法[5-6]、基于神经网络的智能算法[7]、基于滑模观测器的方法等容错控制技术已经得到了一定的发展[8-9].但是基于复杂非线性时变系统的时变故障问题的研究却没有太大的进展,特别是在不确定性偏差模型问题上的容错控制问题没有得到很好地解决[10-11].针对于风力机系统出现的桨距角执行器时变偏差故障问题,本文提出了基于自适应凸多面体观测器的双层凸多面体LPV容错控制方案.首先在传统自适应观测器的基础上设计了自适应凸多面体观测器并优化了其估计算法[12-13],从而加强了该故障观测器在LPV风力机系统故障检测中的融合性和实时性.当获取实时的故障信号后,针对传统单层风力机的LPV模型中存在的线性偏差问题[14],提出了双层凸多面体LPV容错控制方法.根据估计的误差信号,调度变量及拟合的偏差参量分别在凸多面体的每个顶点处设计出各自输出反馈容错控制器,再通过凸组合的方式得到最终容错控制器.该方法不仅消减了传统风力机LPV控制中由线性偏差带来的模型不确定性,还解决了桨距角时变故障的容错控制器设计问题,从而保障了高风速下风力机系统的稳定性和安全性.
2 风力机模型构建风力机模型[15]主要由空气动力学子模型、传动机构子模型、桨距系统子模型、发电机和变流器子模型等组成.在风力的驱动下,风机开始转动,从而带动内部电机旋转;传动机构负责把气动力矩转化为发电机的转速,最后变流器把电力功率传输到电网中.
2.1 空气动力学子模型空气动力学子模型中在风速的作用下在转子桨叶产生了力矩Tr(t),使风轮转子以速度wr(t)旋转.所捕获的风能大小主要是和风速v(t)、空气密度ρ、桨叶的等效面积A和转化效率Cp(λ(t),β(t))有关.其中,Cp(λ(t),β(t))是桨距角β(t)和叶尖速比λ(t)的函数,气动力矩Tr(t)为

|
(1) |
风力机的液压桨距系统由3个独立的桨距执行器组成,可以把它等效为一个2阶动态系统.由于它们结构相同,这里就只描述一个桨距执行器的模型:

|
(2) |
其中,βref(t)为参考桨距角,ωn为自然频率,ζ为阻尼系数.
2.3 传动机构子模型传动机构由低速轴和高速轴组成.低速轴和高速轴的转动惯量分别为Jr和Jg,摩擦系数分别为Br和Bg;高低速轴通过齿轮箱连接,两侧的齿轮比为Ng.考虑传动机构扭力衰减系数Bdt、扭转刚度Kdt、传动系统的输出扭矩角θΔ(t)、电机产生的转矩Tg(t)、发电机转速ωg(t)、气动转矩Tr(t)和风机转速ωr(t),传动系统的模型为
|
(3) |
|
(4) |
|
(5) |
由发电机产生的电能通过变流器输送到通用电网中.发电机的力矩Tg(t)通过跟踪参考力矩Tg,ref(t)来控制,变流器可以近似为一个具有时间常数τg的1阶动态系统.所产生的电能pg(t)是由转换效率ηg决定.其子系统模型为

|
(6) |

|
(7) |
由于Cp(λ(t),β(t))导致了Tr(t)的高度非线性,为此对Tr(t)进行泰勒展开,得到如下形式:

|
(8) |
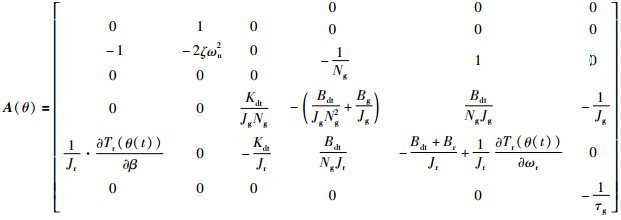
由文[16]可知,式(8)中的3个偏导数分量都可以由风速近似线性表述,故风速v选为调度变量θ.通过适当的选择系统的状态变量,并根据上述风力机的子模型可以将式(1)~式(8)转化为开环状态空间的LPV模型的形式:

|
(9) |
其中,状态变量:

|
|
|
控制输入u=[βref Tg,ref]T,y(t)为反馈输出,w(t)为风速扰动.为了书写的简洁,后文简写A(θ(t))为A,D(θ(t))为D.
3 自适应凸多面体观测器 3.1 问题阐述在高风速下,桨距角的测量很容易出现偏差,通过系统的相互作用,必然也会导致其参考值出现偏差.式(10)为桨距子系统偏差故障的数学模型[17]:

|
(10) |
即

|
(11) |
E为故障矩阵系数,由于故障发生在控制输入通道,所以取E=B. H为偏差增益矩阵,L为观测器增益矩阵,f(t)为故障信号.式(11)又可表示为

|
(12) |
基于线性恒值系统的故障估计模型如式(13)所示:

|
(13) |
其估计算法为
|
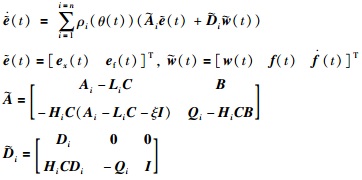
针对于非线性风力机桨距系统时变偏差问题提出基于LPV结构的自适应凸多面体观测器:
|
(14) |
式(15)为新的故障估计算法:

|
(15) |
其中,i是以调度变量构成的LPV模型凸多面体的顶点(n=2θ),Hi为该顶点处的偏差增益矩阵,Ai、Di为该顶点处的控制器矩阵组,Qi为增益矩阵,ρi(θ(t))为凸多面体结构的权重函数,ξ为一个标量值.
相比于一般的估计算法中的单位矩阵I,增益矩阵Qi的引入提供了一定的估计自由度,而ėy(t)的引入在一定程度上增强了故障估计速度和精度.改写的故障估计模型形式则是针对于风力机LPV模型的特有形式,其中ex(t)为状态变量的偏差矩阵.由式(14)可得:
|
(16) |
结合式(13)和式(16)可得式(17)故障估计的增广系统:
|
(17.1) |
根据极点配置D(λ,τ)及H∞控制(γ>0)原理可知[18],若在凸多面体的每一个顶点处都存在对称正定矩阵Pi、对称矩阵Qi、适维矩阵Ri、Yi使得不等式(17.2)和不等式(17.3)成立,则不仅可以保障误差系统稳定且ex(t)、ef(t)的值可以尽可能的小.其中λ、τ分别为极点配置中的极点及范围参数,σ为一个可选常数.
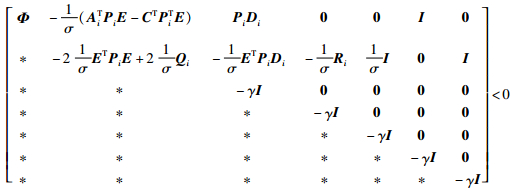
|
(17.2) |
|
(17.3) |
其中,*表示矩阵的对称分量.
4 双层凸多面体容错控制器设计 4.1 双层凸多面体的结构原理式(8)中对Tr(t)进行线性化时,由风速近似线性表出的3个偏导数分量的值是存在误差的.这使得线性化模型存在一定的不确定性偏差.这往往会使得在单层凸多面体结构顶点处所求解的容错控制器不够准确和理想.而双层凸多面体结构是在原有单层凸多面体的顶点四周,根据不确定参数η的个数和的变化范围,选取对应个数的邻近点构成第2层凸多面体.对于每个邻近点都离线设计出控制器,再根据邻近点控制器的线性合成方法计算出第1层顶点控制器,进一步利用计算所得的第1层凸多面体顶点控制器和实时可测的调度变量求取满足性能指标的最终控制器. 图 1为双层凸多面体的原理结构示意图.

|
| 图 1 双层凸多面体的原理结构示意图 Figure 1 The schematic diagram of a double convex polyhedron structure |
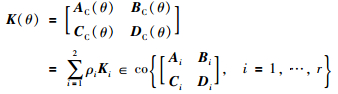
图 1中存在2个调度变量和3个偏差参量,其中整个中间阴影区域是以θ为调度变量的第1层凸多面体结构.其顶点个数i是由调度变量的个数n决定的(一般i=2n). Ki为第1层中每个顶点所对应的控制器.根据线性偏差参量η的个数m和变化范围确定了第2层凸多面体的顶点Dij(j=2m),由每组Dij组成的小凸多面体共同构成了第2层凸多面体的结构.其中K(θ1)、K(θ2)、K(θ3)为调度变量取某一个固定值时的控制器矩阵.
4.2 风力机双层凸多面体模型构建根据文[19]中的实际风力机实验数据可知,∂Ta(θ(t))/∂β、∂Ta(θ(t))/∂wr、∂Ta(θ(t))/∂v与风速成一定的曲线关系,在对其3组曲线初步线性拟合后,并代入系统数据后式(9)可以写成式(18)中A(θ,η)、D(θ,η)带有不确定性偏差的线性表达式:
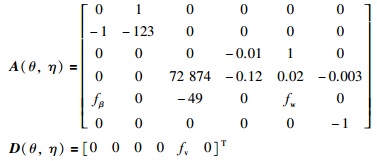
|
(18) |
其中,fβ=-0.05θ+η1,fw=-0.8θ+η2,fv=η3,θ是调度变量,η1、η2、η3是偏差参量.
由于建模和线性化带来的模型不确定性而设立的第2层凸多面体的结构如式(19)和式(20)所示:
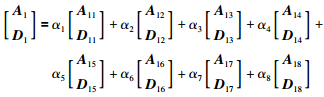
|
(19) |
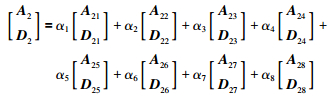
|
(20) |
由于有η1、η2、η3三个偏差参量,故在第1层的基础上A1,D1;A2,D2可以表示为8组{αj,Aij,Dij}的组合方式.其中αj为第2层凸多面体的调度参量,Aij、Dij为其调度矩阵.将η1、η2、η3的两端点值分别代入到矩阵A1、A2、D1、D2中即可分别得到Aij、Dij数值矩阵的形式(i=1,2,j=1,2,…,8).其中,
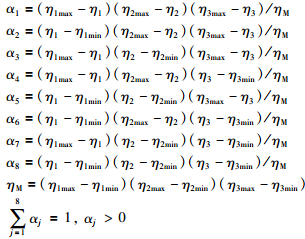
|
其中,ηkmax、ηkmin(k=1,2,3)分别为不确定性参量的最大和最小值,η1、η2、η3是在某一内层顶点处偏差参量的取值.
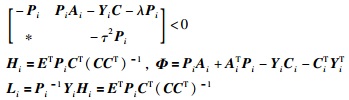
4.3 容错控制器设计假设1 rank(B,E)=rank(B).
由文[20]可知:若存在矩阵B*使得下列等式成立,则上述假设与下列条件等价:

|
(21) |
设输出反馈容错控制器状态方程为

|
(22) |
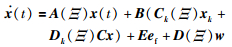
(θi,ηij)每取一组值就代表了一个外层顶点.为了书写简洁,下列各式中(θi,ηij)改写成(Ξ),则:

|
(23) |
由式(21)和式(23)可得式(24):
|
(24) |
联立式(22)和式(24)得到增广系统:

|
|
定理1 对于给定的标量γ>0,假设在每一个(Ξ)处都存在对称正定矩阵F,G∈Rn×n和辅助矩阵




|
(25) |

|
(26) |
|
其中MNT=I-FG,其过渡矩阵M、N的值可由矩阵奇异值分解得到.
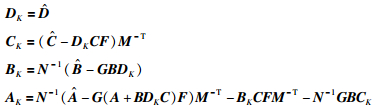
4.4 控制器求解步骤(1) 在每一个凸多面体顶点(θi,ηij)处利用LMI的方法对式(25)和式(26)进行求解,得到一组F、G、
(2) 利用式MNT=In-FG进行奇异值分解得到矩阵M、N.
(3) 在每一个外层凸多面体顶点(θi,ηij)处依次求出控制器参数矩阵DK、CK、BK、AK.
(4) 内层顶点处的控制器矩阵DC、CC、BC、AC可由求解出的每一组外层控制器参数矩阵,该顶点处的偏差参量值η及权重函数αj组合而成:

|
(5) 当内层每一个顶点处的控制器矩阵参数获得后,利用类似的方式即可获得总的控制器矩阵参数:
|
针对于桨距角的时变偏差故障设置了3组故障:
故障1:
|
故障2:
|
故障3:
|
风力机系统部分仿真参数如表 1中所示.
| 参数 | 值 |
| Bdt | 775 |
| Br | 7.11 |
| Bg | 45.6 |
| Ng | 95 |
| (η1min,η1max) | (9.2,11.5) |
| (η2min,η2max) | (0.3,0.5) |
| Jg | 390 kg·m2 |
| Jr | 106 kg·m2 |
| A | 10 385 m2 |
| ρ | 1.225 kg/m3 |
| (θmin,θmax) | (12,24) |
| (η3min,η3max) | (0.7,0.9) |
图 2和图 3为自适应观测器估计的故障信号. 图 2显示的情况为:在30 s~50 s处估计到正弦故障信号,其它时间未出现故障信号. 图 3显示的情况为:在60 s~70 s处估计到斜坡故障信号f1,其它时段未出现故障信号.

|
| 图 2 正弦偏差故障信号 Figure 2 The sinusoidal deviation fault signals |

|
| 图 3 斜坡故障故障信号 Figure 3 The slope failure fault signals |
图 4、图 5是在故障下一般控制器和双层凸多面体容错控制器及单层凸多面体容错控制器与双层凸多面体容错控制器的控制效果对比图.在无故障时段(0~30 s、50 s~100 s)容错控制和一般控制器的效果相差无几.但在故障阶段(30 s~50 s)容错控制的效果得以体现.在30 s处的容错控制有一个小抖动,但是很快便恢复过来.在整个故障阶段始终保证了转矩角的稳定,从而维持了故障系统的平稳运行.与单层LPV容错控制器相比较,在故障发生的时间段内,双层的效果明显要优于单层的控制效果.

|
| 图 4 故障1控制效果对比图 Figure 4 The contrast diagram of the control effect for the fault 1 |

|
| 图 5 故障1的两种容错控制效果对比图 Figure 5 The contrast diagram of the two fault-tolerant control effect for the fault 1 |
图 6、图 7是在故障f2下一般控制器与双层凸多面体容错控制器、单层凸多面体容错控制器与双层凸多面体容错控制器的控制效果对比图.在故障发生前(0~60 s、70 s~100 s)容错控制和一般控制器的效果相差无几.但在故障阶段(30 s~50 s),容错控制器很好地保证了转矩角的稳定输出.与单层LPV容错控制器相比较,在故障发生的时间段内,双层的效果明显要优于单层的控制效果.

|
| 图 6 故障2控制效果对比图 Figure 6 The contrast figure of control effect for the fault 2 |

|
| 图 7 故障2的两种容错控制效果对比图 Figure 7 The contrast diagram of the two fault-tolerant control effect for the fault 2 |
故障f3的设计是为了体现双层容错控制器在一段时间内连续处理故障的效果. 图 8、图 9是在图 4和图 6的基础上将两种时变偏差故障在不同时段依次接入系统中.在0~30 s无故障阶段,系统平稳运行;在30 s~50 s故障f1阶段,容错控制器很好地抑制了正弦故障的影响;在50 s~60 s无故障阶段系统再次平稳运行;在60 s~70 s容错控制器又抑制了斜坡故障的影响;最后故障全部消失,系统回归稳定.与单层LPV控制器相比较,在故障发生的时间段内,双层的效果明显也要优于单层的控制效果.

|
| 图 8 故障3控制效果对比图 Figure 8 The contrast diagram of the control effect for the fault 3 |

|
| 图 9 故障3的两种容错控制效果对比图 Figure 9 The contrast diagram of the two fault-tolerant control effect for the fault 3 |
注 在图 4~图 9中,0~16 s时段内系统处于低风速状态下,系统无需桨距角调控. 16 s后系统进入高风速段,桨距角开始运行.所以出现的一个瞬态的切换效果属于正常现象且与本文讨论的问题无关.
6 结论在出现桨距角时变偏差故障的情况下,凸多面体结构的观测器及其改进算法准确的显示了故障的发生.在获取实时的故障信号后,针对传统单层风力机的LPV模型中存在的线性偏差问题,提出了双层凸多面体LPV容错控制方法.利用估计的误差信号、调度变量及拟合的偏差参量通过凸组合的方式,得到最终控制器. 3组故障的仿真结果所示,桨距角在发生时变故障时,采用该方法的系统依旧能够保持良好的运行状态,起到了容错控制器调节功能.使得系统在无故障的情况下系统照常运行,在出现故障的情况下也能稳定运行.
| [1] | Jin J, Xiang Y. Fault-tolerant control systems:A comparative study between active and passive approaches[J]. Annual Reviews in Control, 2012, 36(1): 60–72. DOI:10.1016/j.arcontrol.2012.03.005 |
| [2] |
毛海杰, 李炜, 冯小林.
非线性系统主动容错控制综述[J]. 传感器与微系统, 2014, 33(4): 6–13.
Mao H J, Li W, Feng X L. Review of active fault tolerant control for Nonlinear systems[J]. Transducer and Microsystem Technologies, 2014, 33(4): 6–13. |
| [3] | Qiang M S, Jiang Bin, Xu D Z. Fault tolerant tracking control scheme for UAV using dynamic surface control technique[J]. Circuits, Systems and Signal Processing, 2012, 31(5): 1713–1729. DOI:10.1007/s00034-012-9402-5 |
| [4] | 陈华民. LPV系统的主动容错控制[D]. 上海: 上海交通大学, 2015. Chen H M. Active fault tolerant control of LPV systems[D]. Shanghai:Shanghai Jiao Tong University, 2015. http://d.g.wanfangdata.com.cn/Thesis_D785530.aspx |
| [5] | Huo Z H, Zheng Y, Xu C. A robust fault tolerant control strategy for networked control systems[J]. Journal of Network and Computer Applications, 2010, 34(2): 708–714. |
| [6] |
宋锦, 吴定会.
基于虚拟传感器的风力机LPV容错控制[J]. 信息与控制, 2015, 44(4): 474–480.
Song J, Wu D H. LPV fault tolerant control of wind turbines based on virtual sensor[J]. Information and Control, 2015, 44(4): 474–480. |
| [7] | Zakwan S. Fault tolerant control based on stochastic distribution via RBF neural networks[J]. Journal of Systems Engineering and Electronics, 2011, 22(01): 63–69. DOI:10.3969/j.issn.1004-4132.2011.01.007 |
| [8] | Hu Q L. Robust adaptive sliding-mode fault-tolerant control with L2-gain performance for flexible spacecraft using redundant reaction wheels[J]. IET Control Theory & Applications, 2010, 33(2): 87–96. |
| [9] |
聂宏, 王强.
不确定多时滞离散切换系统滑模可靠控制[J]. 控制工程, 2015, 22(6): 1151–1157.
Nie H, Wang Q. Sliding-mode reliable control for a class of uncertain discrete-time switched systems with multi-delay[J]. Control Engineering of China, 2015, 22(6): 1151–1157. |
| [10] | Mao H J, Li W, Feng X L. Review of active fault tolerant control for nonlinear system[J]. Transducer and Microsystem Technologies, 2014, 33(4): 6–13. |
| [11] | Song X Q, Liu C S, Zhang S J. Adaptive active fault tolerant control for discrete-time systems with uncertainties[J]. Asian Journal of Control, 2016, 18(5): 1–10. |
| [12] |
王君瑞, 钟彦儒, 宋卫章.
基于无源性与自适应降阶观测器的双馈风力发电机控制[J]. 中国电机工程学报, 2011, 31(33): 159–168.
Wang J R, Zhong Y H, Song W Z. Doubly-fed induction generator control for wind power based on passivity and adaptively reduced order observer[J]. Proceedings of the CSEE, 2011, 31(33): 159–168. |
| [13] |
吴定会, 翟艳杰.
基于系统辨识算法的风力机桨距系统故障诊断[J]. 信息与控制, 2016, 45(5): 563–567.
Wu D H, Zhai Y J. Fault diagnosis for the pitch system of wind turbines using the system identification algorithm[J]. Information and Control, 2016, 45(5): 563–567. |
| [14] | Wu D H, Li Y Y, Ji Z C. Active fault tolerant LPV control of wind energy conversion system[J]. Control Engineering of China, 2014, 21(5): 712–717. |
| [15] | Yue T, Wang L X, Ai J Q. Gain self scheduled H∞ control for morphing aircraft in the wing transition process based on an LPV model[J]. Chinese Journal of Aeronautics, 2013, 26(4): 909–917. DOI:10.1016/j.cja.2013.06.004 |
| [16] | Christoffer S, Thomas E, Jakbon S. Fault diagnosis and fault tolerant control of wind turbines[M]. Berlin, Germany: Springer-Verlag, 2011: 56-63. |
| [17] | Gao Z, Ding S X. Fault estimation and fault tolerant control for descriptor systems via proportional, multiple integral and derivative observer design[J]. IET Control Theory & Applications, 2007, 1(5): 1208–1218. |
| [18] | Yang G H, Ye D. Reliable control of linear systems with adaptive mechanism[J]. IEEE Transactions on Automatic Control, 2010, 55(1): 242–247. DOI:10.1109/TAC.2009.2036293 |
| [19] | Christoffer S, Thomas E, Jakbon S. Robust and fault tolerant linear parameter-varying control of wind turbines[J]. Mechatronics, 2011, 21(4): 645–659. DOI:10.1016/j.mechatronics.2011.02.001 |
| [20] | Jiang B, Staroswiecki M, Cocquempot V. Fault accommodation for nonlinear dynamic systems[J]. IEEE Transactions on Automatic Control, 2006, 51(9): 1578–1583. DOI:10.1109/TAC.2006.878732 |