



1 引言
飞行仿真转台是一种典型的伺服控制系统,是进行飞行器地面半物理仿真实验的关键设备.
干扰观测器(disturbance observer,DOB)是一种主动估计系统扰动并进行实时补偿的方法,广泛应用于伺服系统中[1],并且近年来She等人提出了一种基于等价输入干扰(equivalent input disturbance,EID)的扰动抑制方法,由于其无需利用干扰观测器所需对象的逆模型,避免了不稳定的零极点对消的情况,有效保证了系统的性能[2-4].
滑模变结构控制具有以下的优点:算法比较简单,不必依赖精确的系统模型;当参数摄动及外部扰动满足完全匹配条件时,控制系统对参数变化与外界干扰具有不变性[5-8].然而抖振的问题严重制约了滑模控制在实际中的应用,系统处于滑动模态的时候,其对不确定性的不变性也正是依靠系统中的高频抖振[6-9].但是对多数的系统,如转台伺服系统来说,抖振是有害的:1)抖振会使得系统中的齿轮原件磨损加速;2)抖振会激发系统中的未建模动态,从而会破坏系统的稳定性[10-13].文[11]通过使用饱和函数或平滑函数来取代符号函数,通过这样的连续近似的方法可以有效地减少系统的抖振,但是这同时也降低了系统的控制性能.
高阶滑模控制系统在保留了传统一阶滑模控制的鲁棒性的同时减小了抖振,这是因为高阶滑模对原本不连续的控制信号进行了积分或滤波的作用,减弱了抖振的产生[14-18].学者进行了大量、深入的研究,提出了许多有效算法.李雪冰等将不确定性用非负函数限定,并采用加幂积分技术保证系统的有限时间稳定[19],Taleb等在一阶自适应滑模控制的基础上设计了一种自适应二阶滑模控制器[20].本文针对飞行转台伺服系统,并考虑到一阶滑模控制的抖振问题,设计了一种基于EID估计器的高阶滑模控制器以提高系统性能,并从理论上证明了控制算法的稳定性.
2 带有EID的系统控制结构 2.1 系统控制结构飞行仿真转台是飞行器地面半实物仿真的重要设备,它可以在实验室模拟飞行器在空中的各种运动姿态,有效地降低了飞行器的研发成本.转台各轴原理及控制方式相同,现对其单轴进行研究.
转台是一个典型的伺服系统,其结构如图 1所示.其中,r(t)为系统输入,y(t)为系统输出,u(t)为控制输入,uf(t)为闭环控制器输出值,

|
| 图 1 转台控制系统框图 Figure 1 Block diagram of the turntable control system |
单输入单输出线性时变系统的状态方程为
|
(1) |
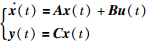
其中,对象的状态变量x(t)∈Rn,控制输入u(t)∈Rp,y(t)∈Rq是系统输出,系统矩阵A∈Rn×n,控制矩阵B∈Rn×p,输出矩阵C∈Rq×n,干扰d1∈Rnd,Bd∈Rn×nd.
式(1)中的B与Bd的维数可能不等,所以干扰并非仅仅存在于控制输入上,干扰的作用点有很多.如果假设被控对象满足能控且能观测的条件,根据文[2]对EID的定义,将不同作用点的干扰等效到系统的输入通道上,则系统(1)可以描述为
|
(2) |
其中,d为系统的EID.
为了保证系统的控制性能,消除干扰对系统性能的影响,针对系统(2)设计EID估计器,对d实现有效的估计与补偿. EID估计器的结构如图 2所示.其中,

|
| 图 2 带有EID估计器的被控对象 Figure 2 Controlled object with EID estimator |
针对系统(2)设计状态观测器:

|
(3) |
使

|
(4) |
现假设存在一个控制输入u1(t)使得系统有表达式:

|
(5) |
将式(5)代入式(4)中得:

|
(6) |
因而观测器的状态方程亦为

|
(7) |
其中,
结合式(3)与式(7)可以推出干扰的估计值:

|
(8) |
设计低通滤波器让





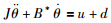
飞行仿真转台伺服系统主要是由台体、执行电机、功放、测速机、位置测角装置等设备组成,系统建模时要将这些环节都要考虑进去[20].一般来讲,电机电枢、电感、电机负载的粘性阻尼都非常小,可以近似为0,这样被控对象的传递函数可以写为
|
(9) |
其中,J表示等效转动惯量,单位为(kg·m2);θ表示角位置,单位为(°);

对于系统(9),选择角位置信号及角速度信号为系统状态变量,x1=θ,
|
(10) |
其中,A=[0 1;0 -B*/J],B=[0;1/J],C=[1 0].
假设EID估计器对系统干扰进行了有效的估计和补偿,则引入EID估计器后系统方程变为
|
系统(2)亦可改写为

|
(11) |
其中,
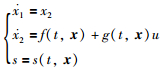
结合式(11)考虑系统:
|
(12) |
x∈Rn,u∈R是系统的状态与控制输入;f(t,x)与g(t,x)是不确定的光滑函数.
高阶滑模实际上是在Filippov意义下,不连续动态系统的一种特殊的积分流形上的运动,高阶滑模可通过滑模变量s及其各阶导数收敛到0来描述[21].其中滑模面各阶导数的集合:sr={x|s(t,x)=…=sr-1(t,x)=0}称为“r阶滑模集”,并且
对于系统(9)由高阶滑模控制的原理,为使控制器u的导数显含于

|
(13) |
其中,a>0,b>0,1>α>0,0 < β < 1,k>0,k1>0.
定理1 由到达条件(13),系统(11)的相轨迹将能够最终收敛于集合:
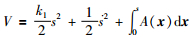
证明 取李亚普诺夫函数:
|
(14) |
这里令:

|
(15) |
易得V>0,V对时间t的导数为

|
(16) |
将式(15)代入式(16)则可以得出

|
(17) |
由式(17)可知,




综上所述系统将会收敛于集合:

|
其中,切换项sgn s前的系数由b|s|α+k组成,利用初始时|s|较大来加快系统收敛速度,随着时间增加s趋近于0,切换项的幅值亦随之减小.这里k存在的目的是为保证系统的稳定性.
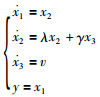
3.3 二阶滑模控制器的设计假设系统的相关度为r,即控制输入u第一次出现在s的r阶导数中[22-24],这里控制目标使得系统(11)对滑模面s的相关度为1,滑模面的导数中显含
|
(18) |
其中,v为虚拟控制器,其相当于式(11)中的u的导数,即

|
下面来进行滑模变量的设计.
假设系统的跟踪误差为

|
(19) |
其中r为给定信号,通过采用跟踪误差以及误差的导数来进行滑模变量的设计:
|
(20) |
c为常数,通过增加c的值可以加快系统收敛的速度.

|
(21) |

|
(22) |
|
(23) |
由式(19)及式(20)~式(23)可得

|
(24) |
又由到达条件(13)可得

|
因此:

|
(25) |
从而可以推出:
|
(26) |
实际控制器:

|
(27) |
理论上讲,可以将虚拟控制器v中的a、h与b取值取的很大,从而获得控制系统良好动态性能.经仿真分析验证,适当地增加a的值可以有效地减小误差,但同时其到达给定信号时间亦增加.在实际中要考虑到控制器的受限情况,具体取值与系统有关.
4 仿真结果分析与对比对转台伺服系统(18):λ=-B*/J,γ=1/J,取转动惯量J=1/800 kg·m·s2,等效阻尼比为B*=65/800 N·m·s·rad-1.为了验证所提方法的有效性,设计一阶滑模控制器与之进行对比.
设初始信号为x0=[0.5;0.5],其中r为给定正弦信号Asin(a2πt),控制器设计为

|
(28) |
这里η大于0的常数.
二阶滑模系统滑模面的选取同一阶滑模面.取虚拟控制器(26),实际控制器为(27).
给定信号r为Asin(f2πt),这里首先取低速A=0.5,f=0.1 Hz;扰动信号d为0.5sin(2t),当t=5 s时在原干扰上突加常值干扰,此时d=0.5sin(2t)+5;一阶滑模中的参数c=10,η=50,二阶滑模控制器中的参数:a=10,b=100,α=1/2,h=30,k1=0.1,k=50,一阶及二阶滑模均采用EID估计器,EID参数为:滤波器F(s)中T=0.01,L=[200;12 000].
在低速时系统的跟踪曲线,误差以及控制器的图形如图 3、图 4所示.

|
| 图 3 低速时无EID估计器的系统位置跟踪曲线 Figure 3 System position tracking curve without EID estimator at low speed |

|
| 图 4 低速时含EID估计器的系统位置跟踪曲线 Figure 4 System position tracking curve with EID estimator at low speed |
通过比较图 3、图 4可知,在低速情况下,当系统中不含EID估计器时,一阶与二阶滑模均不能较好跟踪给定信号,尤其是当突加常值干扰时一阶滑模跟踪曲线单调递增,已不能跟踪给定信号.相比之下,带有EID估计器的一阶与二阶滑模均能较好跟踪给定信号.
由图 5可知在系统含有EID估计器的前提下,当干扰发生突变时,采用所设计的二阶滑模控制器时,系统的误差较传统一阶滑模控制有明显的减小.

|
| 图 5 低速时含EID估计器的一阶、二阶滑模误差 Figure 5 First order, two order sliding mode error with EID estimator at low speed |
通过比较图 4、图 5及图 6可知,含有EID估计器时一阶滑模与二阶滑控制均可较好跟踪给定信号,但一阶滑模控制器的抖振问题较为严重,更易激发系统的未建模动态.这是由于一阶滑模控制器中直接含有不连续的切换项,因此抖振再所难免,而高阶滑模控制器中切换项并未直接加在控制器上,而是作用于虚拟控制器,由图可见高阶滑模有效减小抖振的产生.并且低速时一阶滑模在干扰突变时鲁棒性差.

|
| 图 6 低速时含EID估计器的一阶、二阶滑模控制输入 Figure 6 First order two order sliding mode control input with EID estimator at low speed |
高速时取A=0.5,f=5 Hz,与扰动信号d为0.5sin(2t),当t=1.5 s时在原干扰上突加常值干扰,此时d=0.5sin(2t)+5.一阶与二阶滑模面控制器以及EID的参数选取与低速时相同,则在高速时系统的跟踪曲线、误差以及控制器图形如图 7~图 9所示.

|
| 图 7 高速时无EID估计器的系统位置跟踪曲线 Figure 7 System position tracking curve without EID estimator at high speed |

|
| 图 8 高速时含EID估计器的系统位置跟踪曲线 Figure 8 System position tracking curve with EID estimator at high speed |

|
| 图 9 高速时含EID估计器的一阶、二阶滑模误差 Figure 9 First order, two order sliding mode error with EID estimator at high speed |

|
| 图 10 高速时含EID估计器的一阶、二阶滑模控制输入 Figure 10 First order two order sliding mode control input with EID estimator at high speed |
比较图 4、图 5、图 8及图 9,不论在低速情况还是在高速状态,带有EID估计器的一阶与二阶滑模控制系统均能较好地跟踪给定信号.并且由图 3和图 6易知,在突加给定干扰时传统一阶滑模控制器使得系统跟踪信号突变情况较严重,而所设计的二阶滑模控制器可以使系统较快地收敛于稳态,较传统一阶滑模有较好的鲁棒性.
5 结论本文针对飞行转台伺服系统,并考虑到一阶滑模控制的抖振问题,设计了一种新型二阶滑模控制器;通过虚拟控制器增加系统的相对阶,从理论上证明了该控制算法的稳定性.加入了EID估计器来进一步提高系统性能.对比传统一阶滑模,此控制算法有效地减少了抖振的产生,并且误差亦有所减小.仿真结果证明该控制算法的有效性.
| [1] | 刘强. 现代高精度数字伺服系统运动控制理论及应用研究[D]. 北京: 北京航空航天大学, 2002. Liu Q. Modern high precision motion control theory and application research on digital servo system[D]. Beijing:Beijing University of Aeronautics and Astronautics, 2002. http://d.wanfangdata.com.cn/Thesis/Y2684872 |
| [2] | She J H, Fang M X, Ohyama Y. Improving disturbance-rejection Performance based on an equivalent-input-disturbance approach[J]. IEEE Transactions on industrial Electronics, 2008, 55(1): 380–389. DOI:10.1109/TIE.2007.905976 |
| [3] | 吴正成. 基于等价输入干扰估计器的永磁同步伺服系统的设计与实现[D]. 无锡: 江南大学, 2011. Wu Z C. Construction and realization of permanent magnet synchronous servo system based on equivalent input disturbance estimator[D]. Wuxi:Jiangnan University, 2011. http://d.wanfangdata.com.cn/Thesis/Y1889500 |
| [4] | 刘瑞娟. 基于等价输入干扰补偿的几类典型系统扰动抑制的设计[D]. 长沙: 中南大学, 2014. Liu R J. Disturbance rejection design for some typical systems based on the equivalent-input-disturbance compensation[D]. Changsha:Central South University, 2014. http://d.wanfangdata.com.cn/Thesis/Y2684872 |
| [5] |
阎晓妹, 尚婷, 赵小国.
基于主动滑模控制的不确定分数阶混沌(超混沌)系统的延迟同步[J]. 信息与控制, 2015, 44(1): 1–7.
Yan X M, Shang T, Zhao X G. Lag Synchronization of uncertain fractional-order chaotic (hyperchaotic) systems using active sliding mode control[J]. Information and Control, 2015, 44(1): 1–7. |
| [6] |
钟华, 潘金文, 王永.
一种基于特征模型的自适应离散滑模控制[J]. 信息与控制, 2015, 44(1): 56–61.
Zhong H, Pan J W, Wang Y. Characteristic model-based adaptive discrete-time sliding mode control[J]. Information and Control, 2015, 44(1): 56–61. |
| [7] |
张梦楠, 徐洪泽, 张严心.
基于自适应模糊滑模控制的高速列车自动停车算法[J]. 信息与控制, 2015, 44(2): 223–229.
Zhang M N, Xu H Z, Zhang Y X. Automatic stop method for high speed train based on adaptive fuzzy sliding mode control[J]. Information and Control, 2015, 44(2): 223–229. |
| [8] |
刘金琨.
滑模变结构控制MATLAB仿真[M]. 北京: 清华大学出版社, 2012.
Liu J K. Sliding mode control design and MATLAB simulation[M]. Beijing: Tsinghua University Press, 2012. |
| [9] |
高为炳.
变结构控制的理论设计及方法[M]. 北京: 科学出版社, 2005.
Gao W B. The theory design and the method of variable structure control[M]. Beijing: Science Press, 2005. |
| [10] | 李鹏. 传统和高阶滑模控制研究及应用[D]. 长沙: 国防科学技术大学, 2011. Li P. Research and application of traditional and higher-order sliding mode control[D]. Changsha:National University of Defense Technology, 2011. http://cdmd.cnki.com.cn/Article/CDMD-90002-1011303399.htm |
| [11] |
王鹤, 李耀峰, 张守龙, 等.
基于自适应Terminal滑模的混沌振荡控制[J]. 电力系统及其自动化学报, 2013, 25(3): 61–66.
Wang H, Li Y F, Zhang S L, et al. Chaotic oscillation control based on adaptive Terminal sliding mode[J]. Proceedings of the CSU-EPSA, 2013, 25(3): 61–66. |
| [12] | 李琳. 滑模变结构控制系统抑制抖振方法的研究[D]. 大连: 大连理工大学, 2006. Li L. A study of chattering elimination in sliding mode control system[D]. Dalian:Dalian University of Technology, 2006. http://d.wanfangdata.com.cn/Thesis_Y1029646.aspx |
| [13] |
SloanJ J, 李卫平.
应用非线性控制[M]. 北京: 国防工行业出版社, 1992.
Sloan J J, Li W P. The application of the nonlinear control[M]. Beijing: National Defense Industry Press, 1992. |
| [14] |
袁赣南, 左志丹, 曲桂婷, 等.
二阶滑模变结构控制系统的滑模到达条件[J]. 华中科技大学学报:自然科学版, 2013, 41(6): 71–75.
Yuan G N, Zuo Z D, Qu G T, et al. Reach condition of sliding mode in second-order sliding mode variable structure control systems[J]. Huazhong Univerisity of Science & Technology:Natural Science Edition, 2013, 41(6): 71–75. |
| [15] | Orr J S, Shtessel Y B. Lunar spacecraft powered descent control using higher-order sliding mode techniques[J]. Journal of the Franklin Institute, 2012, 349(2): 476–492. DOI:10.1016/j.jfranklin.2011.06.015 |
| [16] | Ebrahimi B, Tafreshi R, Mohammadpour J, et al. Second-order sliding mode strategy for air-fuel ratio control of lean-burn SI engines[J]. IEEE Transactions on Control Systems Technology, 2014, 22(4): 1374–1384. DOI:10.1109/TCST.2013.2281437 |
| [17] | Farhoud A, Erfanian A. Fully automatic control of paraplegic FES pedaling using higher-order sliding mode and fuzzy logic control[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(3): 533–542. DOI:10.1109/TNSRE.2013.2296334 |
| [18] | Khandekar A A, Malwatkar G M, Patre B M, et al. Discrete sliding mode control for robust tracking of higher order delay time systems with experimental application[J]. ISA Transactions, 2013, 52(1): 36–44. DOI:10.1016/j.isatra.2012.09.002 |
| [19] |
李雪冰, 马莉, 丁世宏.
一类新的二阶滑模控制方法及其在倒立摆控制中的应用[J]. 自动化学报, 2015, 41(1): 194–201.
Li X B, Ma L, Ding S H. A new second order sliding mode control and its application to inverted pendulum[J]. Acta Automatics Sinica, 2015, 41(1): 194–201. |
| [20] | Taleb M, Plestan F, Bououlid B. Higher order sliding mode control based on adaptive first order sliding mode controller[J]. IFAC Proceedings, 2014, 47(3): 1380–1385. DOI:10.3182/20140824-6-ZA-1003.02487 |
| [21] | 于楠楠. 飞行仿真转台运动控制的研究[D]. 包头: 内蒙古科技大学, 2015. Yu N N. Motion control research of flight simulator[D]. Baotou:Inner Mongolia university of Science and Technology, 2015. http://d.wanfangdata.com.cn/Thesis/D665882 |
| [22] |
张静.
高阶滑模控制问题研究探讨[J]. 控制工程, 2013, 20(s1): 78–81.
Zhang J. Study on higher order sliding mode control method[J]. Control Engineering of China, 2013, 20(s1): 78–81. |
| [23] |
孙宜标, 何新.
直接驱动数控转台自适应二阶滑模控制[J]. 制造技术与机床, 2014(1): 41–47.
Sun Y B, He X. Adaptive second order sliding mode control for direct drive NC rotary table[J]. Manufacturing Technology & Machine Tool, 2014(1): 41–47. |
| [24] |
皇甫宜耿, LaghroucheS, 刘卫国, 等.
高阶滑模消抖控制在永磁同步电动机中的应用[J]. 电机与控制学报, 2012, 16(2): 8–12.
Huangfu Y G, Laghrouche S, Liu W G, et al. Chattering avoidance high order sliding mode control for permanent magnet synchronous motor[J]. Electric Machines and Control, 2012, 16(2): 8–12. |