



1 引言
航空发动机是一个典型强非线性、高度耦合的控制系统,工作环境(飞行高度和来流马赫数)和系统状态(转子转速)是影响其动态特性的主要因素.由于发动机的全包线内不能直接利用非线性气动热力学模型来设计控制系统,因此,搭建航空发动机的高精度模型就成了研究发动机控制系统的重难点之一.而本文是从已有的各种设计方法中,选取了对某个稳态工作点进行小偏差线性化得到线性化模型的方法.在发动机的建模过程及发动机的运行过程中,存在着系统状态变量和控制变量是时刻改变且无法实时精确测量的问题.而自适应控制方法在设计控制器时不需要对象的精确数学模型,而是通过直接调整控制器的参数等手段来适应对象的变化,很好地解决了该问题.但是在自适应参数调节过程中可能出现过度调节[1-3]的情况,从而无法保证系统的动态性能满足飞行过程中的要求.为了解决该问题,在这里引入了重置控制的思想[4-6].
重置控制系统是一类由连续动态线性控制器和一个重置机构组成的特殊的混合控制系统,即在离散时间间隔对控制器的状态进行强制重置[7-12].最早的重置控制是由Clegg在1958年提出的,Clegg控制器(CI)[13]是最简单的一种重置单元,它包含一个线性积分器和一个重置律,只要当系统输入穿过重置层时就会使积分器的状态重置为0. CI的主要优势就是它的描述函数与线性参照具有相同的增益频率性质,并且具有更小的相位滞后.这种性质在线性反馈控制设计中用来解决Bode相位增益的限制.另一种重置方式是在文[14]中提出的,也就是在系统的输入输出异号时进行重置.
不过,本文中所添加的重置机构不同与上面介绍的两类重置机构,主要区别在于重置对象.以往的重置都是针对系统变量进行的,在这里将选取自适应律中的调节参数作为重置对象.这样重置的好处在一般情况下常参数调节比传统自适应调节具有更好的瞬态特性,所以对重置机构进行了这样的设计,具体证明可参考文[15].
针对刚开始提到的调节过程出现参数跳变的情况,本文将根据系统误差的范围大小决定是否进行重置,重置后将把自适应调节参数重置为一个常参数,而该常参数将保证自适应参数误差小于规定的范围.
本文的主要工作就是对某航空发动机的线性数学模型,设计模型参考自适应控制器,并对其自适应律进行改进,即在其基础上添加一个重置机构.然后给出相关的定理及证明过程,最后的仿真实验验证了设计方法的正确性.通过该重置机构可以提高系统的动态特性,使航空发动机能更好地完成飞行任务.
2 航空发动机的数学模型及控制问题的描述由参考文[16]可以得到某发动机的线性状态变量模型为

|
(1) |
其中,AP∈Rn×n,BP∈Rn×m是含有未知常参数的矩阵;FP∈Rn,FP=-(APxe+BPue),xP(t)∈Rn为航空发动机的可测状态变量,其中包括航空发动机的高压、低压转子转速,各个截面的压力及温度等变量;xe是期望平衡点,即稳态工作点;ue是维持系统工作在平衡点xe处所需要的稳态控制输入;u(t)=[u1(t),…,um(t)]∈Rm为航空发动机控制输入,其中包括航空发动机的主燃料室的燃油流量、加力燃料室的加力燃油流量以及尾喷口的面积等[17].
根据航空发动机状态方程的结构及模型的阶次选取满足航空发动机期望的性能指标要求的参考模型为

|
(2) |
其中,xM(t)∈Rn为期望的航空发动机参考模型的状态向量,均为可测量的状态变量;r(t)∈Rm为航空发动机控制系统的参考输入,AM∈Rn×n,BM∈Rn×m,矩阵AM、FM和BM均为参数已知的常值矩阵且AM为赫尔维茨矩阵,这样可以保证所选取的航空发动机参考模型是满足期望的性能指标要求的.
3 重置自适应控制器设计在本节中,先设计传统自适应律,然后在其基础上添加一个重置机构,使得在保证系统渐近收敛的情况下提高系统的瞬态特性.
利用第2节得到的航空发动机的线性状态方程模型和选取的参考模型,现在设计一个基于航空发动机状态可观测时的增益反馈型重置模型参考自适应控制系统,其结构框图如图 1所示.

|
| 图 1 重置模型参考自适应控制系统结构框图 Figure 1 Structure diagram of the reset model reference adaptive control system |
针对发动机系统将自适应控制器设计为

|
(3) |
其中,F(t)∈Rn×m是反馈增益矩阵,K1(t)、K2(t)∈Rm×m是前馈增益矩阵.三者均为参数可调矩阵,从而可以表示该系统中参数可调的自适应控制律[18].所设计的控制器对系统中未知矩阵所代表的环境和状态变化具有适应性.
根据式(1)~式(3),得到系统的增广状态方程为

|
(4) |
其中,ẋ′P(t)∈Rn,F*、K1*和K2*分别为模型匹配时的参数F(t)、K1(t)和K2(t)的取值,即系统达到最终的稳态时的参数取值,F*、K1*和K2*的维数与F(t)、K1(t)和K2(t)的维数相同,具体可表示为K1*=[K11*,K12*,K1i*],





由参考模型(2)和系统增广状态方程(4),可以得到系统的误差为
|
(5) |
其中,e(t)∈Rn.
由参考文[5]得到自适应控制律表达式为
|
(6) |
P和Γ均为正定矩阵,P∈Rn×n,Γ∈Rn×n且P=PT>0,
针对本文提出来的重置自适应控制,其控制目标为

|
(7) |
即,保证在整个自适应调节过程中调节参数误差不大于d.其中,

注 假设预估计值θ和d是提前设定好的.如果未知参数属于一个确定的紧致集Ω,那么就可以选择Ω的中间值来作为θ,从而使d最小化.此外,可以通过文[19]中提出的方法,在有限的时间内计算出预估计值.
结合传统自适应律,系统的重置自适应控制律将变成式(8):
|
(8) |
其中,Br为系统处于渐近稳定时,自适应控制系统误差e(t)的取值范围.
注 该重置自适应律实际上是由两个部分组成的控制律.一个是在范围Br外的重置自适应律,另一个是在范围Br内的传统自适应控制律.
引理 对于系统,假设存在一个光滑函数V(x):Rn→R和K类函数α1(·)、α2(·)使得
1) α1(x(t))≤V(x)≤α2(x(t)).
2) 
对所有的x∈Rn,那么系统的平衡点x=0是稳定的[20].
假设1 有两个正定函数V1(e(t)),G(e(t))∈C1和K类函数β1(·)、β2(·),对于所有e(t)∈Rn,有:
|
(9) |

|
(10) |
另外,对于所有‖e(t)‖>r>0存在:
|
(11) |
其中,ψ=[xP(t) ri(t) 1]T,h>2L为一个比例常数.
注 对本文系统,条件(9)保证可以得到正定矩阵P和Q使矩阵AM满足AMTP+PAM=-Q,因此,可以选择正定函数V1=eT(t)Pe(t)和G=eT(t)Qe(t)使得
|
(12) |
满足式(9)~式(11).
定理1 在重置自适应律的调解下,系统在平衡点e=0处是稳定的.
证明 根据本文的重置自适应率,可以保证
|
(13) |
根据式(10)和式(13)可以得到满足引理的条件,即系统在平衡点e=0处是稳定的.
假设2 存在正定函数V1(e(t)),G(e(t))∈C1和正常数a、c1、c2、c3,使得对所有e(t)∈Rn有:

|
(14) |

|
(15) |
用φ(t0)>V1(t0)构造一个φ系统:
|
(16) |
其中,δ是一个很小的正数,λ是待设定的正常数.
由式(16)可以得到
|
(17) |
定理2 当重置自适应率添加到参数误差系统(5)中时,将保证:
1) 所有信号均为有界.
2) 在球Br外,‖e(t)‖的边界为
证明 首先对1)进行证明.考虑到在没有重置结构的连续时间区间内,对于系统的相关
|
(18) |
在重置时刻tσ,重置机构将保证

|
(19) |
式(18)和式(19)保证了


下面来证明2):
当

|
(20) |
将式(11)代入式(20),对于所有e(t)∉Br有:

|
(21) |
由式(20)和式(21)可以得到

|
(22) |
整理一下,得到

|
(23) |
选择λ使其满足0 < λ < λ.由式(23)和式(17)得到对所有e(t)∈Rn\Br,t>t0,有:

|
(24) |
由式(14)和式(24)可得

|
(25) |
对于所有e(t0)∈Rn\Br′,t∈[t0,t1-),将式(17)与上式结合可得
|
(26) |
由式(16)、式(17)和式(25)可以得到
|
(27) |
那么就可以得到e(t)抵达球Br′的有限时间为

|
(28) |
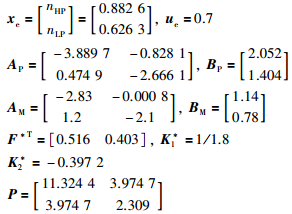
针对本文设计的基于模型参考的航空发动机重置自适应控制系统,选取JetCat SPT5发动机处于最大连续推力状态的工作点作为例子对所提出方法进行验证.
该发动机在工作点处动态模型为

|
(29) |
其中FP=-(APxe+BPue),xP(t)为航空发动机的状态变量,这里取高压转子转速nHP和低压转子转速nLP,u(t)为航空发动机的控制输入,这里取燃油流量. xe是期望平衡点,ue是维持系统工作在平衡点xe处所需要的稳态控制输入.
根据文[21]以及发动机性能的要求计与被控对象模型相匹配的参考模型为

|
(30) |
其中,xM(t)为参考模型的状态向量,r(t)为参考模型的输入量,AM∈Rn×n,BM∈Rn×m,矩阵AM、FM和BM均为参数已知的常值的矩阵.
下面根据动态模型、参考模型以及自适应律搭建Simnlink仿真框图进行仿真.根据参考文[21]的方法,将控制系统中状态值和输入值,即发动机真实的转速值和燃油输入值转化为标准值.同时根据文[22]得到发动机在该工作点处的状态空间模型,具体的相关数据及仿真图如图 2~图 5所示.
|

|
| 图 2 模型参考自适应律下的输入信号曲线 Figure 2 The input signal curve under model reference adaptive control |

|
| 图 3 重置模型参考自适应律下的输入信号曲线 Figure 3 The input signal curve under reset model reference adaptive control |

|
| 图 4 模型参考自适应律下的误差曲线 Figure 4 The error curve under model reference adaptive control |

|
| 图 5 重置模型参考自适应律下的误差曲线 Figure 5 The error curve under reset model reference adaptive control |
图 2和图 3分别为传统模型参考自适应律下的输入信号曲线和加入重置机构之后的输入曲线,图 4和图 5分别为传统模型参考自适应律下的系统状态误差曲线和加入重置机构之后的系统状态误差曲线,其中实线为高压转速误差,虚线为低压转速误差.通过图 4和图 5的对比,可以很明显地观察到传统模型参考自适应律改进之后,在同一时刻系统的误差曲线更为平缓,意味着在整个自适应调节过程中自适应参数的误差范围同时也缩小了,也就达到了最初设计重置机构的目的.在实际应用中,可以根据飞行过程中的具体需求更改重置参数,使得系统的动态性能更为出色.
5 总结本文首先介绍了航空发动机控制中的相关难题,并借此引出了自适应控制和重置控制.考虑到自适应控制中可能出现过度调节的缺陷以及重置控制可以随时对控制系统进行重置的优势,本文将二者结合起来组成了基于模型参考的重置自适应控制.最后对提出的相关定理进行了证明,并且利用Simulink证明了重置自适应律可以减弱传统模型参考自适应控制中的过度调节问题,提高了系统的动态性能.
| [1] | Cao C, Hovakimyan N. Design and analysis of a novel L1 adaptive control architecture with guaranteed transient performance[J]. IEEE Transactions on Automatic Control, 2008, 53(2): 1–34. DOI:10.1109/TAC.2008.919477 |
| [2] | Sun J. A modified model reference adaptive control scheme for improved transient performance[J]. IEEE Transactions on Automatic Control, 1993, 38(8): 1255–1259. DOI:10.1109/9.233162 |
| [3] | Ydstie B E. Transient performance and robustness of direct adaptive control[J]. IEEE Transactions on Automatic Control, 1992, 37(8): 1091–1105. DOI:10.1109/9.151091 |
| [4] | Anderson B D, Brinsmead T S, De Bruyne F. Multiple model adaptive control. Part 1:Finite controller coverings[J]. International Journal of Robust and Nonlinear Control, 2000, 10(11/12): 909–929. |
| [5] | Hespanha J, Liberzon D, StephenMorse A. Multiple model adaptive control. Part 2:Switching[J]. International Journal of Robust and Nonlinear Control, 2001, 11(5): 479–496. DOI:10.1002/(ISSN)1099-1239 |
| [6] | Narendra S, Balakrishnan J. Adaptive control using multiple models[J]. IEEE Transactions on Automatic Control, 1997, 42(2): 171–187. DOI:10.1109/9.554398 |
| [7] | Aangenent W, Witvoet G, Heemels W, et al. Performance analysis of reset control systems[J]. International Journal of Robust and Nonlinear Control, 2010, 20(11): 1213–1233. |
| [8] | Beker O, Hollot C, Chait Y. Plant with integrator:An example of reset control overcoming limitations of linear feedback[J]. IEEE Transactions on Automatic Control, 2001, 46(11): 1797–1799. DOI:10.1109/9.964694 |
| [9] | Guo Y, Wang Y, Xie L, et al. Stability analysis and design of reset systems:Theory and an application[J]. Automatica, 2009, 45(2): 492–497. DOI:10.1016/j.automatica.2008.08.016 |
| [10] | Carrasco J, Banos A, van der Schaft A. A passivity-based approach to reset control systems stability[J]. Systems & Control Letters, 2006, 59(1): 18–24. |
| [11] | Beker O, Hollot C, Chait Y, et al. Fundamental properties of reset control systems[J]. Automatica, 2004, 40(6): 905–915. DOI:10.1016/j.automatica.2004.01.004 |
| [12] | Banos A, Carrasco J, Barreiro A. Reset times-dependent stability of reset control systems[J]. IEEE Transactions on Automatic Control, 2011, 56(1): 217–223. DOI:10.1109/TAC.2010.2088892 |
| [13] | Clegg J C. A nonlinear integrator for sevromechanisim[J]. Transactions of the American Institute of Electrical Engineers, 1958, 77: 41–42. |
| [14] | Nei D, Zaccarian L, Teel A R. Stability properties of reset systems[J]. Automatica, 2008, 44: 2019–2026. DOI:10.1016/j.automatica.2007.11.014 |
| [15] | Wang X, Zhao J. Logic-based reset adaption design for improving transient performance of nonlinear system[J]. IEEE/CAA Journal of Automatica Sinica, 2015, 2(4): 440–448. DOI:10.1109/JAS.2015.7296539 |
| [16] | 赵媛媛. 基于航空发动机切换模型的自适应跟踪控制[D]. 沈阳: 东北大学, 2015. Zhao Y Y. Adaptive tracking control for the switched model of the aeroengine[D]. Shenyang:Northeastern University, 2015. |
| [17] | 年夫强, 马宏军, 杨光红. 航空发动机模型参考自适应控制[C]//第27届中国控制与决策会议论文集. 沈阳: 东北大学, 2015: 6583-6588. Nian F Q, Ma H J, Yang G H. Model reference adaptive control for aeroengine[C]//Proceedings of the 27th Chinese Control and Decision Conference. Shenyang:the Southeast University, 2015:6583-6588. |
| [18] |
徐湘元.
自适应控制理论与应用[M]. 北京: 电子工业出版社, 2007.
Xu X Y. Theory and application of automatic control[M]. Beijing: Publishing House of Electronics Industry, 2007. |
| [19] | Adetola V, Guay M. Finite-time parameter estimation in adaptive control of nonlinear systems[J]. IEEE Transactions on Automatic Control, 2008, 53(3): 807–811. DOI:10.1109/TAC.2008.919568 |
| [20] | Alberto I. Nonlinear control system[M]. Beijing: Publishing House of Electronics Industry, 2007. |
| [21] | Pakmehr M, Fitzgerald N, Feron E, et al. Gain scheduling control of gas turbine engines:Stability by computing a single quadratic Lyapunovfunction[J]. Proceeding of the ASME Turbo Expo, 2013, 33(43): 256–306. |
| [22] |
樊思齐, 李华聪, 樊丁.
航空发动机控制(下册)[M]. 西安: 西北工业大学出版社, 2008.
Fan S Q, Li H C, Fan D. Aircraft engine control[M]. Xi'an: Press of Northwestern Polytechnical University, 2008. |