



2. 武汉理工大学自动化学院, 湖北 武汉 430007
2. School of Automation, Wuhan University of Technology, Wuhan 430070, China
1 引言
时滞系统具有无穷维空间,要实现其优化控制,它的观察器和控制器都应该是无穷维的,这是控制理论界长期没有解决的难题,而且难控度将随着容积的增加而增加,也即双容要比单容难控,多容则更难控.本文研究的是双容时滞系统的优化控制问题.
近年来,为解决双容时滞系统控制问题,学者们作了大量研究[1-4].文[5]用Taylor级数和Skogestad死区逼近方法将双容时滞模型降维成单容时滞模型,然后采用IMC(internal model control)算法设计PID(proportional-integral-derivative)参数,设计简单有效,但其快速性和抗干扰性并没有讨论.文[6]针对一类积分加延时的双容时滞模型,根据Hermite-Biehler原理设计了一个数值程序用来确定PID控制器的参数,该方法简单实用,但也没有讨论抗干扰性.文[7]对被控对象双容水箱的模型进行分析,选择了实验建模获取的双容时滞模型的传递函数,设计了3种基于内模控制的改进型方案,仿真结果验证了内模控制在时滞对象上控制的优越性,但也没有讨论其抗干扰性.文[8]针对双容时滞系统,设计了一个自整定2自由度比例—积分(PI)控制器,通过选择最大灵敏度为1.4~2.0时所需的鲁棒性来设计相关的闭环控制系统参数.文[9]采用IMC-PID控制器并串入前置滤波器的方法设计双容时滞系统,对负荷扰动的控制效果较好,但在参数扰动下,系统鲁棒性并不十分理想.为了消除时滞,人们开发出了Smith预估器,文[10]设计了改进型Smith预估器,对非最小相位2阶不稳定时滞过程进行控制,该方法包括定点跟踪控制器和抗扰控制器的设计,当全补偿时,其控制效果明显;但当出现欠补偿或者过补偿时,控制系统中就会出现超前项和滞后项,性能指标急剧恶化.文[11]为双容时滞不确定系统设计了分数阶PID控制器,采用约束优化算法来确定控制器中代表系统不确定性的5个未知参数,并讨论了开环系统幅频特性,该方法可以提高系统的鲁棒性和快速性,但表征系统特性的参数较多,选取较复杂.文[12-14]研究了与双容时滞相关的系统鲁棒稳定化,其原理是先对系统进行模型变换,将原系统模型变换为与其等价或近似等价的新系统,然后利用李亚普诺夫泛函和LMI(linear matrix inequality)方法,引入各种技巧,获得与时滞相关的鲁棒稳定条件及鲁棒控制器.项国波等[15-20]在1995年提出二次优化控制原理,实现了时滞系统的优化控制问题,并将其应用在电子皮带称[21]、空调和滞环电流优化控制系统[22]等工程实践中,实现了跟踪控制快速平稳、抗扰控制鲁棒性强的性能指标,但尚未解决不稳定时滞过程的优化控制问题.文[23]针对一类2阶不稳定时滞系统的抗扰动鲁棒性和动态响应问题,提出二次优化控制结构整形的方法来实现其优化控制,但只研究了单容系统,没有研究双容系统且系统的响应速度、平稳性及抗扰能力仍有进一步提高的空间.
2014年,项国波等设计了一种新的放大器——均方根放大器(SRA)[24],并指出应用它可以将已优化的控制系统非线性化.本文首先简介了双容时滞系统二次优化控制原理,然后应用均方根放大器改造线性积分器,设计出非线性均方根积分器,最后与文[8]所提出的方法分别在参数扰动和负载扰动下作对比研究,通过仿真实例验证了本文所提出的再优化方法,对控制信号而言,不仅跟踪更快速平稳,而且对负荷和参数扰动同时存在的强烈扰动下,系统具有很强的鲁棒性,因此更适合工程应用实现.
2 二次优化控制 2.1 双容时滞系统ITAE优化控制系统设双容纯时滞受控对象的数学模型为
|
(1) |
式中,K=K1K2为被控对象的放大系数,T1、T2为时间常数,L为时滞时间,
为了实现式(1)的位移无静差ITAE优化控制,需要构造如图 1所示的结构图,其中,R(p)为系统输入,Y(p)为系统输出,E(p)为系统输出与输入之差,Kc为前置放大系数,Fμ+2(p)为被控对象无穷维观测器和控制器,Yf(p)为观测器Fμ+2(p)的输出.

|
| 图 1 双容时滞系统位移无静差ITAE优化控制结构图 Figure 1 Structure of the ITAE optimal control without displacement steady-state errors for the SODTS |
为了求出Fμ+2(p)结构和参数,令:
|
(2) |
则式(1)取:
|
(3) |
根据文[20]的双容时滞系统二次优化控制原理,式(3)的一次优化控制的结构图如图 2所示.

|
| 图 2 双容时滞系统一次优化控制结构图 Figure 2 Structure diagram of the first optimal control for the SODTS |
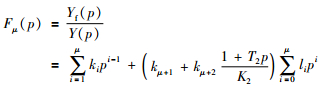
它的开环传递函数为

|
(4) |
式中,
|
(5) |
不失一般性,令μ=4.展开式(4):

|
(6) |
整理式(6),可得:

|
(7) |
其中:
|
令:
|
(8) |
式中,
|
(9) |
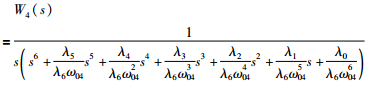
根据文[20],7阶标准化ITAE位移无静差开环传递函数为
|
(10) |
令式(9)、式(10)中的s同次幂系数相等,整理后可得,图 2系统第1次优化控制器参数为
|
(11) |
式中,
|
(12) |
为式(10)系统选取不同的超调σ1,式(11)中的βi可取文[20]中的表 1-5、表 1-6或表 1-7中的7阶βi值.因此,一次优化控制器的参数集{kc,ki}中,只有ω0μ是未知的.为求ω0μ,图 2中的近似因子需要回到无穷维空间,如图 3所示.

|
| 图 3 双容时滞系统二次优化控制结构图 Figure 3 Structure diagram of the TOC for the SODTS |
根据图 3,具有无穷维因子的纯时滞系统开环传递函数为

|
(13) |
式中,
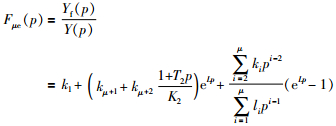
|
(14) |
式(14)就是被控系统无穷维的观测器和控制器.
式(14)中出现了超前项,成为一个超前的无穷维反馈方程,它对输出信号的变化趋势有预知功能,因此同Smith预估器一样具有补偿时滞的功能,由于这种补偿是通过负反馈完成的,因此它的补偿时滞功能要比Smith预估器好.
式(13)中既有超前项,也有滞后项,用解析法很难求出最优ω0μ,但可以用计算机仿真求出式(13)系统满足ITAE最优控制率的ω0μ,将其代入式(11),可求得双容系统二次优化控制器的所有参数.
3 比较研究1文[8]研究的受控对象为

|
(15) |
当μ=1时,取σ1=1%,从文[20]的表[1-7]中查得第1次优化参数集{βi}为

|
回到无穷维空间,在Matlab中求得式(15)二次优化控制系统,满足ITAE最优性能指标的ω01=1.05,代入到式(11),求得二次优化控制器参数集{Kc,ki}.同理可得当μ=2,3,4时的参数集,见表 1所示.它们的实时阶跃响应如图 4所示.它们的控制效果汇总于表 2所示,表中σ2%为超调量;ts为误差到达1%的过渡过程时间.
| μ | 1 | 2 | 3 | 4 |
| ω0μ | 1.05 | 1.61 | 2.04 | 2.74 |
| Kc | 0.486 2 | 1.730 8 | 3.166 7 | 6.319 0 |
| k1 | 0.017 7 | 1.13 | 2.190 4 | 7.700 9 |
| k2 | 1.249 9 | 0.636 5 | 1.139 2 | 3.786 1 |
| k3 | -0.990 5 | 2.1609 | 0.339 7 | 0.9873 |
| k4 | - | -0.636 9 | 3.290 6 | 0.344 7 |
| k5 | - | - | -0.201 6 | 1.039 1 |
| k6 | - | - | - | 2.305 5 |

|
| 图 4 式(15)二次优化控制的阶跃响应 Figure 4 Step response of the TOC with Eq.(15) |
| μ | 1 | 2 | 3 | 4 |
| σ2/(%) | 11.73 | 9.79 | 3.79 | 3.97 |
| ts | 13.25 | 10.66 | 6.01 | 4.10 |
图 4和表 2表明:应用无穷维全状态负反馈控制器实现的优化控制,可完全消除时滞影响,有很强的鲁棒性.
一个优良的控制系统,不仅对控制信号,要有快速平稳的性能指标,而且对受控对象的负荷扰动和参数扰动也应该具有很强的抗干扰能力.为了和文[8]进行比较,当t=18 s时,突加负荷扰动10%;控制对象中的2个惯性环节放大系数又同时各增加10%的参数扰动,它们的响应如图 5所示,品质数值指标见表 3所示,表中Edm为突加负载/参数同时扰动后突降最大值;tds突加负载/参数同时扰动后恢复1%的过渡过程时间.

|
| 图 5 ΔK=10%,D(t)=-10%时式(15)对象2种控制效果 Figure 5 Two control effects of the Eq.(15) in case of ΔK=10%, D(t)=-10% |
结果表明,文[8]跟踪响应虽然平稳些,但它的抗扰能力比μ=2,3,4三个优化控制系统都差.因此,接下来需要对二次优化结果进行再优化,即非线性化设计.
4 非线性化设计文[24]指出:线性放大器并不是一个理想的放大器.过渡过程之初,控制信号总是很小的.而要实现既快速又平稳的暂态过程,则要求在过渡过程之初,其放大器的增益应尽可能地大,尽快加速;而当过渡过程临近结束之时,其放大系数却要尽量地小,及时制动.用控制信号u的2n次均方根函数作为放大器,就能实现这两种矛盾的功能.因此理想放大器的放大系数Ks应具有下述函数增益功能:
|
(16) |
式中,u为控制信号,n=1,2,3,….
式(16)所表示的均方根放大器,实质上是个非线性放大器[24]:小信号时,它起加速作用;大信号时,它发挥制动功能,而且功能的转换是随着控制信号的大小,自动完成的.现用该均方根放大器,对上述二次优化系统再进行非线性化设计,可以获得更好的品质指标.
非线性化系统的优化设计,是一个新的理论难题,但从工程应用角度来看,利用计算机强大的运算功能,依靠人工智能,在双容时滞二次优化控制系统的结构图中,插入均方根放大器.以式(15)为控制对象,当μ=3时,构造非线性化控制系统如图 6所示,在kμ+1的反馈输入通道上串联一个放大器kf,为了弥补负反馈通道增强之后,造成响应减速,再在正向通道中再增加一个放大器ksc.

|
| 图 6 μ=3时用均方根放大器对式(15)进行非线性化后的控制系统 Figure 6 ND control system of the Eq.(15) by using SRA in case of μ=3 |
图 6系统的开环传递函数为

|
(17) |
取均方根放大器为

|
| 图 7 非线性化设计系统的阶跃响应 Figure 7 Step response of the ND system |
同理,当μ=2,4时,根据二次优化控制系统响应结果,用人工智能方法,调整满意的均方根放大器的个数n及{Kc,ksc,kf,ki},获得如表 4所示的非线性化参数集.
对比表 4和表 1可知,在kμ+1的反馈输入通道上串联放大器kf后,只需调整kμ+2即可得非线性化控制的效果,极为方便.它们的实时阶跃响应如图 7所示,品质指标见表 5.
| μ | ω0μ | n | σ/(%) | ts |
| 1 | 1.05 | 2 | 0.03 | 6.7 |
| 2 | 1.61 | 4 | 0.01 | 3.0 |
| 3 | 2.04 | 4 | 0.03 | 3.05 |
| 4 | 2.57 | 4 | 0.12 | 3.73 |
图 4和图 7表明:二次优化控制系统经非线性化再设计后,4个系统的跟踪响应品质指标σ都极近于0;比较表 2和表 5知:非线性化设计的系统过渡过程时间ts比二次优化控制系统缩短了很多,其中,μ=1系统缩短了49.44%,μ=2系统缩短了71.96%,μ=3系统缩短了49.25%,μ=4系统缩短了9.03%.可见二次优化控制系统经非线性化设计后具有极佳的跟踪响应.
5 比较研究2对时滞系统而言,鲁棒性强弱是一个更重要的衡量指标,以式(15)为被控对象,分别采用文[8]的控制方法及本文提出的非线性化设计方法进行鲁棒性分析.
(1) 当t=20 s时突加负荷扰动-10%,文[8]和非线性化控制系统的控制效果如图 8所示.

|
| 图 8 D(t)=-10%时两种控制方法下的效果 Figure 8 Results of the two control methods in case of D(t)=-10% |
(2) 当突加负荷扰动-30%时,文[8]和非线性化控制系统的控制效果如图 9所示.

|
| 图 9 D(t)=-30%时两种控制方法下的效果 Figure 9 Results of the two control methods in case of D(t)=-30% |
(3) 当t=25 s时,突加负荷扰动-30%,同时被控制对象式(15)的2个惯性环节放大系数各增加20%的参数扰动,文[8]和非线性化控制系统的控制效果如图 10所示.

|
| 图 10 ΔK=20%,D(t)=-30%时两种控制方法下的效果 Figure 10 Results of the two control methods in case of ΔK=20%, D(t)=-30% |
| μ | 1 | 2 | 3 | 4 | 文[8]效果 | |
| D(t)=-10% | σ2 /(%) | 0.03 | 0.01 | 0.03 | 0.12 | 0 |
| ts | 6.7 | 3 | 3.05 | 3.73 | 14.36 | |
| Edm /(%) | -0.73 | -0.66 | -0.1 | -0.07 | -7.15 | |
| tds | 0 | 0 | 0 | 0 | 8.79 | |
| D(t)=-30% | σ2 /(%) | 0.03 | 0.01 | 0.03 | 0.12 | 0 |
| ts | 6.7 | 3 | 3.05 | 3.73 | 14.36 | |
| Edm /(%) | -2.19 | -1.99 | -0.3 | -0.21 | 21.44 | |
| tds | 10.45 | 18.2 | 0 | 0 | 12.2 | |
| ΔK=20% D(t)=-30% |
σ2 /(%) | 11.17 | 8.42 | 6.32 | 10.19 | 0 |
| ts | 14.5 | 19.67 | 20.73 | 19.46 | 10.4 | |
| Edm /(%) | -2.51 | -2.06 | -0.01 | -0.18 | -29.28 | |
| tds | 7.06 | 5.77 | 0 | 0 | 10.51 | |
(1) 当D(t)=-10%时,与文[8]相比,所有的非线性化系统不仅跟踪响应更加快速平稳,而且鲁棒性接近无穷大.
(2) 当D(t)=-30%时,μ=3和μ=4两个非线性化系统,虽然快速性和平稳性稍差,但它们的负荷扰动后的最大跌落Edm几乎为0.
(3) 当突加负荷D(t)=-30%,同时又增加参数扰动ΔK=20%时,μ=3和μ=4两个非线性化系统的最大跌落Edm几近于0.
综上,与文[8]的控制效果相比,非线性化控制系统不仅响应速度快、稳定性更好,而且其中μ=2和μ=3两个非线性化控制系统的综合性能指标最好.应该指出:本文的方法对抗负荷扰动的能力很强,对抗参数扰动能力虽然比文[8]强,但还可以进一步提高,可作为接下来的研究方向.
6 结论本文提出一种应用均方根积分器的非线性设计算法,对已实现二次优化控制的双容时滞系统进行再优化设计,以提高系统的性能指标.通过比较研究算例的仿真结果表明,应用该算法后的系统不仅具有更快速更平稳的跟踪响应,而且对负荷扰动具有接近于无穷大的鲁棒性,其中μ=2和μ=3两个非线性化控制系统的综合性能指标最好.算法适用性强且易于工程实现.
| [1] | Sirota L, Halevi Y. Fractional order control of the two-dimensional wave equation[J]. Automatica, 2015, 59(C): 152–163. |
| [2] | Li M J, Zhou P, Zhao Z C, et al. Two-degree-of-freedom fractional order-PID controllers design for fractional order processes with dead-time[J]. ISA Transactions, 2016, 61: 147–154. DOI:10.1016/j.isatra.2015.12.007 |
| [3] | Carrasco J, Baños A. Reset control of an industrial in-line pH Process[J]. IEEE Transactions on control systems technology, 2012, 20(4): 1100–1106. DOI:10.1109/TCST.2011.2157920 |
| [4] | Vladimir B, Marek K, Petr D, et al. Adaptive predictive control of time-delay systems[J]. Computers and Mathematics with Applications, 2013, 66: 165–176. DOI:10.1016/j.camwa.2013.01.035 |
| [5] | Chaturvedi M, Juneja P. Effect of dead time approximation on controller performance designed for a second order delayed model[C]//International Conference on Advanced Electronic Systems. Piscataway, NJ, USA:IEEE, 2013:313-315. |
| [6] | Fabrizio P, Antonio V. On the stabilizing PID controllers for integral processes[J]. IEEE Transactions on Automatic Control, 2012, 57(2): 494–499. DOI:10.1109/TAC.2011.2164821 |
| [7] | 薛俊. 时滞系统的内模控制及其在PLC中的实现及应用[D]. 上海: 东华大学, 2015. Xue J. The implementation of IMC based on PLC and its application[D]. Shanghai:Donghua University, 2015. http://d.wanfangdata.com.cn/Thesis/D631620 |
| [8] | Alfaro V M, Vilanova R. Model-reference robust tuning of 2DoF PI controllers for first-and second-order plus dead-time controlled processes[J]. Journal of Process Control, 2012, 22(2): 359–374. DOI:10.1016/j.jprocont.2012.01.001 |
| [9] | Shamsuzzoha M, Skliar, Lee M. Design of IMC filter for PID control strategy of open-loop unstable processes with time delay[J]. Asia Pacific Journal of Chemical Engineering, 2012, 7(1): 93–110. DOI:10.1002/apj.v7.1 |
| [10] | Uma S, Rao A S. Enhanced modified Smith predictor for second-order non-minimum phase unstable processes[J]. International Journal of Systems Science, 2014, 47(4): 1–16. |
| [11] | Saidi B, Najar S, Amairi M, et al. Design of a robust fractional PID controller for a second order plus dead time system[C]//International Multi-Conference on Systems, Signals & Devices. Piscataway, NJ, USA:IEEE, 2013:1-6. |
| [12] | Fridman E, Shaked U. Delay-dependent stability and H∞ control:Constant and time-varying delays[J]. International Journal of Control, 2003, 76(1): 48–60. DOI:10.1080/0020717021000049151 |
| [13] | Fridman E, Shaked U. New bounded real lemma representations for time-delay systems and their applications[J]. IEEE Transactions on Automatic Control, 2001, 46(12): 1973–1979. DOI:10.1109/9.975503 |
| [14] | Zheng F, Frank P M. Robust control of uncertain distributed delay systems with application to the stabilization of combustion in rocket motor chambers[J]. Automatic, 2002, 38(3): 487–497. DOI:10.1016/S0005-1098(01)00232-1 |
| [15] |
项国波, 杨益群, 杨启文.
一类单容纯时滞系统二次优化控制[J]. 信息与控制, 1995, 24(4): 209–214.
Xiang G B, Yang Y Q, Yang Q W. Twice optimum control for a kind of first order system with dead time[J]. Information and Control, 1995, 24(4): 209–214. |
| [16] | 杨启文, 杨益群, 项国波. 一类双容纯时滞系统ITAE二次化控制[C]//中国控制会议. 北京: 中国科学技术社, 1995, 475-480. Yang Q W, Yang Y Q, Xiang G B. ITAE twice optimum control for the second order systems with time delay[C]//The Chinese control conference. Beijing:China Science and Technology Agency, 1995:475-480. |
| [17] |
钱业青, 项国波.
纯时滞两次ITAE优化控制系统的背弛定律[J]. 信息与控制, 2000, 29(3): 211–218.
Qian Y Q, Xiang G B. A law of run in the opposite direction for the twice ITAE optimum control in the system with dead time[J]. Information and Control, 2000, 29(3): 211–218. |
| [18] |
杨益群, 项国波, 杨启文.
双容纯时滞系统两次优化控制的背驰定律[J]. 信息与控制, 2004, 33(5): 550–559.
Yang Y Q, Xiang G B, Yang Q W. A law of run in the opposite direction for the twice optimization control of a two-capacity system with pure dead time[J]. Information and Control, 2004, 33(5): 550–559. |
| [19] | Yang Y Q, Xiang G B. Global satisfactory control for nonlinear integrator processes with long delay[J]. Journal of Control Theory and Applicatons, 2007, 5(2): 207–210. |
| [20] |
项国波.
时滞系统优化控制[M]. 北京: 中国电力出版社, 2009: 22-27.
Xiang G B. Optimum control of system with dead time[M]. Beijing: China Electric Power Press, 2009: 22-27. |
| [21] |
杨益群, 项国波, 陈进.
电子皮带秤二次优化控制的实现[J]. 电气传动, 1998, 28(6): 31–34.
Yang Y Q, Xiang G B, Tao J. Realization of twice optimum control for belt weigher[J]. Electric Drive, 1998, 28(6): 31–34. |
| [22] |
张乐, 孙淑强, 孔亚广.
基于二次优化的节能控制器的研究[J]. 机电工程, 2009, 26(11): 41–43.
Zhang L, Sun S Q, Kong Y G. Research on energy saving controller using twice optimum[J]. Mechanical and Electrical Engineering, 2009, 26(11): 41–43. DOI:10.3969/j.issn.1001-4551.2009.11.012 |
| [23] |
余艳, 王钦若, 项国波, 等.
二阶不稳定时滞过程的二次优化控制及结构整形[J]. 信息与控制, 2016, 45(2): 223–228.
Yu Y, Wang Q R, Xiang G B, et al. Twice optimal control for unstable second order process with time delay and its structure pruning[J]. Information and Control, 2016, 45(2): 223–228. |
| [24] |
项国波, 曾念寅.
均方根放大器及其在优化控制系统中的应用[J]. 电气传动, 2014, 44(4): 46–50.
Xiang G B, Zeng N Y. SQF and its application in the optimal control systems[J]. Electric Drive, 2014, 44(4): 46–50. |