



2. 兰州交通大学光电技术与智能控制教育部重点实验室, 甘肃 兰州 730070;
3. 武警陕西总队第一支队, 陕西 西安 712000
2. Key Laboratory of Opto-Technology and Intelligent Control Ministry Education, Lanzhou Jiaotong University, Lanzhou 730070, China;
3. The First Team, Shaanxi Brigade of Armed Police, Xi'an 712000, China
1 引言
永磁同步电机(permanent magnet synchronous motor,PMSM)具有的结构紧凑、高效率、高力矩惯量比和高功率密度等突出优点,因而在工业、交通、军事、航空等重要领域得到广泛应用.对于PMSM驱动系统而言,除了磁场定向控制(field-oriented control,FOC)和直接转矩控制(direct torque control,DTC)两种方法之外,近些年又出现了一种引起广泛重视的控制方式——模型预测电流控制(model predictive current control,MPCC)[1-3]. MPCC利用模型预测控制(MPC)原理[4],是一种在线优化控制算法,该方法概念简单,具有较强约束处理能力,并能同时考虑存在的非线性因素. MPCC是基于电机模型来预测未来的电流,将预测电流值与参考电流值进行比较,以使成本函数最小化从而确定逆变器开关状态,进而控制电机.与传统的FOC和DTC相比,MPCC能明显减小电流脉动,减少逆变器的开关损耗,改善系统的动态性能[5-7].
目前PMSM的MPCC系统中外环转速调节器一般采用PI算法,在一定条件下它能起调节作用,但当系统参数变化或存在外部干扰时(例如,建模的不确定、参数摄动、摩擦阻力和负载扰动等),这种线性调节器难以保证电机系统获得满意性能[8-10].为了改善转速调节器的鲁棒性,一些非线性控制方法相继被提出[11-14],其中滑模(sliding mode,SM)变控制以其控制算法简单、鲁棒性强和可靠性高等优点,被广泛地应用于伺服运动控制系统中[15-18]. SM变结构控制的特点在于控制的不连续性,即系统的“结构”并不固定,它是根据系统当前状态按既定“滑动模态”轨迹运动,这种滑动模态是可以设计的且与系统的参数及扰动无关,因此,它在PMSM高性能控制方案中备受国内外学者青睐.文[19]通过引入非线性幂次组合函数构造了基于偏差的变速趋近律,以提高调速系统的动、静态特性和鲁棒性.文[20]结合线性滑模与非奇异终端滑模,设计了一种混合非奇异终端滑模控制器,实现了状态变量的快速收敛,解决了终端滑模的奇异问题.文[21]设计了一种基于高阶终端滑模的永磁同步电机控制器,削弱了系统的抖动,改善了系统的响应性能和鲁棒性.文[22-23]利用终端滑模理论,分别设计了非奇异快速终端滑模速度控制器和转速观测器,实现了对PMSM转速的精确控制和快速跟踪.
全局快速终端滑模(global fast terminal sliding mode,GFTSM)在滑动模态设计上综合了传统滑模与终端滑模的优点,在到达阶段和滑模阶段都运用了快速终端吸引子的概念.同时GFTSM的控制律是连续的,不包含切换项,从而能消除抖振现象[24-26].因此,对于PMSM的MPCC系统的外环速度调节器,本文将采用GFTSM算法,以提高系统的鲁棒性和快速性.目前基于GFTSM的PMSM MPCC研究鲜有报道.
针对PMSM驱动控制系统,为了增强鲁棒性、实现快速性、提高控制精度,本文提出了基于GFTSM速度调节器的模型预测电流控制方法.
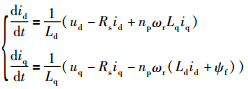
2 永磁同步电机数学模型假设磁路不饱和,空间磁场呈正弦分布,不计涡流和磁滞损耗,PMSM定子电流方程在dq两相旋转坐标系下可表示为
|
(1) |
式中,ud、uq、id、iq、Ld、Lq分别为定子电压、电流、电感在dq轴的分量,Rs为定子电阻,ψf为永磁体磁链,np为磁极对数,ωr为转子机械角速度.
PMSM机械转动方程为

|
(2) |
式中,J为转动惯量;Tl为负载转矩;Tf为库伦摩擦转矩;Bm为阻力摩擦系数;Te为电磁转矩,在dq两相旋转坐标系下可以表达为

|
(3) |
对于隐极式永磁同步电机而言,由于Ld=Lq=L,因此,电磁转矩可表达为

|
针对三相六开关电压源逆变器驱动PMSM系统,采用GFTSM转速调节器,本文所设计的基于GFTSM转速调节器的MPCC系统框图如图 1所示,该系统主要包含:GFTSM、MPCC、三相六开关逆变器(voltage source inverter,VSI)三个部分,图 1中Sxk(x=a,b,c)表示VSI开关状态,Vdc为直流母线电压,Sxk=1和Sxk=0分别表示开关接通和关断.

|
| 图 1 基于GFTSM转速调节器的MPCC系统结构框图 Figure 1 Block diagram of MPCC system based on GFTSM speed regulator |
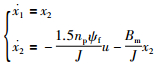
GFTSM的设计目标就是找到合适的控制律,使系统实际转速ωr快速准确地跟随给定转速ωr*,因此定义速度误差为e=ωr*-ωr,取PMSM系统状态变量为x1=e,x2=ẋ1.
假设

|
(4) |
由式(2)~式(4)可得PMSM的状态方程为
|
(5) |
式中:
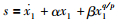
为了使系统(5)具有强的鲁棒性和快速收敛性,本文采用GFTSM技术,取滑模面如下[26]:
|
(6) |
式中:α,β>0;q,p(p>q)均为正奇数.
对式(6)进行1阶微分并将式(5)代入得

|
(7) |
为了抑制滑模抖振,确保系统(5)能快速收敛到滑模面(6),本文采用了一种连续的带有快速终端吸引子的趋近方式,其趋近律设计为[26]

|
(8) |
其中,φ,γ>0;m、v(m>v)均为正奇数.由式(7)和式(8)可得滑模控制律:

|
(9) |
根据式(5)、式(6)和式(9)可得如图 2所示的GFTSM转速调节器结构框图.

|
| 图 2 GFTSM转速调节器的结构框图 Figure 2 Block diagram of GFTSM speed regulator |
通过求解式(8),可得从任意非零初始状态s(0)≠0收敛到滑模面s(tf)=0时所历经的时间为

|
(10) |
说明:
•从式(9)可以看出GFTSM滑模控制律是连续的,不包含切换项,从而能降低系统抖振.
•当系统进入滑模阶段,即s=0时,由式(6)可得

|
(11) |
式(11)表明:当转速误差e远离零点时,收敛时间主要由快速终端吸引子ẋ1=-βx1q/p决定;而当转速误差e接近平衡状态e=0时,收敛时间主要由ẋ1=-αx1决定,即x1呈指数快速衰减.
•由式(8)和式(11)可以看出,到达阶段和滑模阶段都采用了快速终端吸引子,所以设计的GFTSM是全局滑模控制律,它不仅保证了系统响应的鲁棒性,而且使系统响应具有快速性.
•由式(10)可以看出通过选取合适的φ、γ、m和v,可以使系统在有限时间tf内到达平衡状态.
• GFTSM转速调节器输出定子电流参考值iq*,将其作为MPCC的输入,如图 1所示.
3.1.2 GFTSM调节器的稳定性证明定义李亚普诺夫函数为

|
对上式求导得

|
由于(v+m)为偶数,故
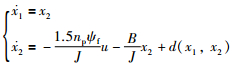
考虑参数不确定和外部扰动,系统(5)可表示为
|
(12) |
式中,d(x1,x2)可视作系统的参数不确定性和外部扰动的总和,令|d(x1,x2)|≤D,D为有限常数.
对式(6)进行1阶微分并将式(12)代入得

|
(13) |
将控制律(9)代入式(13)得:
|
(14) |
其中,
要保证式(14)是快速终端吸引子,则需满足

|
从而有:

|
(15) |
式(15)等价于:

|
因此,快速终端收敛域Δ满足约束方程:
|
进一步假设:
|
通过求解式(14),可得从任意非零初始状态s(0)≠0到达滑模面s(tf)=0时所历经的时间为

|
(16) |
因为γ>η,则等式(16)可变为

|
(17) |
则到达时间tf满足不等式:

|
通过以上分析可知,只要满足条件γ>0,就能保证快速终端收敛,从而受扰系统(12)将会在有限时间内收敛到滑模面s(tf)=0的邻域Δ内.
3.2 MPCC的设计MPCC的原理是:在每个采样周期预测VSI所有开关组合状态下的定子电流,以遍历法方式,通过评价每个电压矢量的控制效果,从中选择出使PMSM定子电流脉动最小的成本函数所对应的VSI开关状态,如图 1所示MPCC主要包括电流预测和成本函数最小化两部分.
3.2.1 最小成本函数MPCC以减少PMSM定子电流脉动为原则来选择电压控制矢量. MPCC策略所采用的目标函数定义为

|
(18) |
式中,id*和iq*为dq轴定子电流分量的参考值;idk+1和iqk+1为dq轴定子电流分量在(k+1)Ts时刻的预测值;V1、V2、V3、V4、V5和V6为VSI不同开关状态所产生的6个非零电压矢量,在kTs时刻Vi值为

|
(19) |
采用1阶欧拉方法对式(1)进行离散,可得dq坐标系下定子电流在下一采样时刻的预测值表达式:
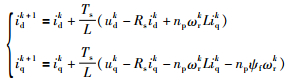
|
(20) |
式中,idk+1和iqk+1表示(k+1)Ts时刻的预测值;idk、iqk和udk、uqk分别为kTs时刻dq轴定子电流和电压分量;ωrk为kTs时刻转子角转速,Ts为采样周期.
4 仿真结果及分析为了验证所设计系统的正确性和有效性,采用Matlab/Simulink/Simspace进行了仿真研究.所用PMSM参数如表 1所示.
| 符号 | 物理量 | 数值 |
| Rs | 定子电阻 | 2.875 Ω |
| Ld,Lq | dq轴电感 | 0.008 5 H |
| ψf | 永磁体磁通 | 0.175 Wb |
| np | 磁极对数 | 4 |
| Vdc | 直流母线电压 | 300 V |
| Tl | 额定转矩 | 4 N·m |
| nN | 额定转速 | 2 000 r/min |
| J | 转动惯量 | 0.000 8 kg·m2 |
| Bm | 粘滞摩擦系数 | 0.001 N·m·s |
为了验证基于GFTSM转速调节器的MPCC方法的优越性,分别构建了基于PI转速调节器和基于常规SM转速调节器的两个MPCC PMSM系统,将上述两个系统与基于GFTSM转速调节器的MPCC PMSM系统进行比较分析.仿真时,采样周期选为26 μs[27],电机空载启动,在0.1 s时突加4 N·m的负载,仿真时间0.2 s. GFTSM转速调节器参数为

|
本文中常规SM转速调节器采用基于指数趋近律的滑模技术,滑模面定义为s=e,滑模趋近律选为ṡ=-k1s-εsgn s.
4.1 抗负载变化能力一致时暂态响应比较为了进行公平合理的比较,调节PI、SM参数,使得基于PI、SM和基于GFTSM的3个MPCC PMSM系统尽可能具有同样的抗负载转矩变化能力(即,上述3个系统转速响应具有同样加载恢复能力),此时PI参数取值:kP=5,kI=0.5;SM参数取值:k1=22 000,ε=1 000. 图 3~图 5分别给出了3种系统的转速、转矩和三相定子电流的动态响应.

|
| 图 3 基于PI转速调节器的MPCC-PMSM系统动态响应 Figure 3 Dynamic response of MPCC-PMSM drive system based on PI speed regulator |

|
| 图 4 基于SM转速调节器的MPCC PMSM系统动态响应 Figure 4 Dynamic response of MPCC PMSM drive system based on SM speed regulator |

|
| 图 5 基于GFTSM转速调节器的MPCC PMSM系统动态响应 Figure 5 Dynamic response of MPCC PMSM drive system based on GFTSM speed regulator |
将图 5(a)与图 3(a)和图 4(a)进行比较,可以看出在抗负载能力一致的情况下,基于PI、基于SM和基于GFTSM转速调节器的3个MPCC-PMSM系统转速响应时间分别为0.016 s、0.015 s和0.014 s,且前两个系统转速响应均有超调,而基于GFTSM的系统转速响应平稳、无超调;比较图 4(b)和图 5(b),并比较图 4(c)和图 5(c),可以看出相比传统指数趋近律SM,GFTSM能够降低滑模控制的抖振.
4.2 暂态响应特性一致时抗载变化能力对比为了进行公平合理的比较,调节PI、SM参数,使得基于PI、SM和基于GFTSM的3个MPCC-PMSM系统尽可能具有同样的暂态响应特性(即,3个系统转速响应具有同样的超调量和调节时间),此时PI参数取值:kp=0.5,ki=0.08;SM参数取值:k1=2 500,ε=800. 图 6~图 8分别给出了3种系统的转速、转矩和三相定子电流的动态响应.

|
| 图 6 基于PI转速调节器的MPCC-PMSM系统动态响应 Figure 6 Dynamic response of MPCC-PMSM drive system based on PI speed regulator |

|
| 图 7 基于SM转速调节器的MPCC-PMSM系统动态响应 Figure 7 Dynamic response of MPCC-PMSM drive system based on SM speed regulator |

|
| 图 8 基于GFTSM转速调节器的MPCC-PMSM系统动态响应 Figure 8 Dynamic response of MPCC-PMSM drive system based on GFTSM speed regulator |
将图 8(a)与图 6(a)和图 7(a)进行比较,可以看出,在转速暂态响应性能一致的情况下,当负载发生变化时,基于PI系统的转速响应在仿真时间0.1 s内未能恢复其稳态值,基于GFTSM系统和基于SM系统的转速响应均能较快地恢复其稳态值,即具有较强的鲁棒性,但通过比较图 8(b)和图 7(b),并比较图 8(c)和图 7(c),可以看出基于SM系统的转矩和定子电流具有明显的抖振.
4.3 三相电流THD值对比三相定子电流谐波失真(total harmonic distortion,THD)计算公式:
|
式中,X1表示基波,Xn是高次谐波,THDx为x(a,b,c)相的谐波失真.
本文在0.05 s到0.1 s时间段,取3个电流周期的采样值,其中基波频率66.7 Hz.在基于PI、SM和GFTSM转速调节器的3个MPCC PMSM系统具有一致暂态响应特性条件下,表 2给出了它们的三相定子电流THD值比较结果.
| 相电流 | ia | ib | ic |
| PI | 2.84% | 2.53% | 2.56% |
| SM | 3.70% | 3.73% | 3.70% |
| GFTSM | 1.39% | 1.35% | 1.38% |
从表 2中可以看出,基于GFTSM转速调节器的MPCC PMSM系统能够降低系统的THD值.
5 结论针对三相PMSM驱动系统,本文提出了基于GFTSM转速调节器的模型预测电流控制策略.所设计的GFTSM转速调节器,能够增强系统抗负载扰动和抗参数变化的能力,提升系统的鲁棒性和快速性;采用MPCC作为控制系统的电流环,能够减小定子电流脉动、提高系统的控制精度.所设计的基于GFTSM的模型预测电流控制策略能够使三相PMSM系统可靠稳定运行,达到满意的转矩和转速控制效果,并减小系统三相定子电流THD值.与基于PI的MPCC PMSM系统相比,本文策略使MPCC-PMSM系统具有更好的动态性能、更强的抗负载扰动能力;与基于SM的MPCC PMSM系统相比,本文策略使MPCC PMSM系统能有效的消除传统滑模中开关项导致的系统抖振问题.仿真结果验证了所提策略的可行性和正确性.
| [1] | Rodriguez J, Pontt J, Silva C A, et al. Predictive current control of a voltage source inverter[J]. IEEE Transactions on Industrial Electronics, 2007, 54(1): 495–503. DOI:10.1109/TIE.2006.888802 |
| [2] | Kwak S, Park J. Predictive control method with future zero-sequence voltage to reduce switching losses in three-phase voltage source inverters[J]. IEEE Transactions on Power Electronics, 2015, 30(3): 1558–1566. DOI:10.1109/TPEL.2014.2304719 |
| [3] |
宋战锋, 夏长亮, 谷鑫.
静止坐标系下基于最优时间序列的电压型PWM整流器电流预测控制[J]. 电工技术学报, 2013, 28(03): 234–240.
Song Z F, Xia C L, Gu X. Stationary frame current regulation of PWM rectifiers based on predictive control[J]. Transactions of China Electrotechnical Society, 2013, 28(03): 234–240. DOI:10.3969/j.issn.1000-6753.2013.03.033 |
| [4] |
滕青芳, 柏建勇, 朱建国, 等.
基于滑模模型参考自适应观测器的无速度传感器三相永磁同步电机模型预测转矩控制[J]. 控制理论与应用, 2015, 32(2): 150–161.
Teng Q F, Bai J Y, Zhu J G, et al. Sensorless model predictive torque control using sliding-mode model reference adaptive system observer for permanent magnet synchronous motor drive systems[J]. Control Theory and Applications, 2015, 32(2): 150–161. |
| [5] | Rodriguez J, Kazmierkowski M P, Espinoza J R, et al. State of the art of finite control set model predictive control in power electronics[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 1003–1016. DOI:10.1109/TII.2012.2221469 |
| [6] |
滕青芳, 李国飞, 朱建国, 等.
基于扩张状态观测器的无速度传感器容错逆变器驱动永磁同步电机系统自抗扰模型预测转矩控制[J]. 控制理论与应用, 2016, 33(5): 676–684.
Teng Q F, Li G F, Zhu J G, et al. Sensorless active disturbance rejection model predictive torque control using extended state observer for permanent magnet synchronous motors fed by three-phase four-switch inverter[J]. Control Theory and Applications, 2016, 33(5): 676–684. |
| [7] | Teng Q F, Bai J Y, Zhu J G, et al. Fault tolerant model predictive control of three-phase permanent magnet synchronous motors[J]. WSEAS Transactions on systems, 2013, 8(12): 385–397. |
| [8] |
王志强, 栾小丽, 刘飞.
多变量非方系统多环PI控制器设计[J]. 信息与控制, 2016, 45(5): 556–562.
Wang Z Q, Luan X L, Liu F. Multi-loop PI controller design for multivariable non-square systems[J]. Information and Control, 2016, 45(5): 556–562. |
| [9] |
王宝仁, 张承瑞, 贾磊.
永磁同步电机低脉动直接转矩控制建模与仿真[J]. 电机与控制学报, 2007, 11(3): 221–226.
Wang B R, Zhang C R, Jia L. Modeling and simulation on a direct torque control algorithm with low ripple for permanent magnet synchronous motors[J]. Electric Machines and Control, 2007, 11(3): 221–226. |
| [10] | Tursini M, Parasiliti F, Zhang D. Real-time gain tuning of PI controllers for high-performance PMSM drives[J]. IEEE Transactions on Industry Applications, 2002, 38(4): 1018–1026. DOI:10.1109/TIA.2002.800564 |
| [11] |
杜仁慧, 吴益飞, 陈威, 等.
永磁同步电机伺服系统高精度自适应鲁棒控制[J]. 信息与控制, 2013, 42(1): 132–137.
Du H R, Wu Y F, Cheng W, et al. High accuracy adaptive robust control for permanent magnet synchronous motor systems[J]. Information and Control, 2013, 42(1): 132–137. |
| [12] |
徐东, 王田苗, 刘敬猛, 等.
永磁同步电机电流环自适应复合控制方法研究[J]. 系统仿真学报, 2009, 21(22): 7199–7204.
Xu D, Wang T M, Liu J M, et al. Research on current-loop adaptive hybrid control method of permanent magnet synchronous motor[J]. Journal of System Simulation, 2009, 21(22): 7199–7204. |
| [13] | Gai J T, Huang S D, Huang Q, et al. A new fuzzy active-disturbance rejection controller applied in PMSM position servo system[C]//17th International Conference on Electrical Machines and Systems. Piscataway, NJ, USA:IEEE, 2014:2055-2059. |
| [14] | Zhang X G, Sun L Z, Zhao K, et al. Nonlinear speed control for PMSM system using sliding-mode control and disturbance compensation techniques[J]. IEEE Transactions on Power Electronics, 2013, 28(3): 1358–1365. DOI:10.1109/TPEL.2012.2206610 |
| [15] |
刘金琨, 孙富春.
滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407–418.
Liu J K, Sun F C. Research and development on theory and algorithms of sliding mode control[J]. Control Theory and Applications, 2007, 24(3): 407–418. |
| [16] | Levant A, Alelishvili L. Integral high-order sliding modes[J]. IEEE Transactions on Automatic Control, 2007, 52(7): 1278–1282. DOI:10.1109/TAC.2007.900830 |
| [17] |
侯利民, 王巍.
表面式永磁同步电机无源非奇异快速终端滑模控制[J]. 电工技术学报, 2014, 29(11): 45–52.
Hou L M, Wang W. Passivity-based control and nonsingular fast terminal sliding mode control for SPMSM[J]. Transactions of China Electrotechnical Society, 2014, 29(11): 45–52. DOI:10.3969/j.issn.1000-6753.2014.11.006 |
| [18] |
张晓光, 赵克, 孙力, 等.
永磁同步电机滑模变结构调速系统动态品质控制[J]. 中国电机工程学报, 2011, 31(15): 47–52.
Zhang X G, Zhao K, Sun L, et al. Sliding mode control of permanent magnet synchronous motor based on a novel exponential reaching law[J]. Proceedings of the CSEE, 2011, 31(15): 47–52. |
| [19] |
茅靖峰, 吴爱华, 吴国庆, 等.
永磁同步电机幂次变速趋近律积分滑模控制[J]. 电气传动, 2014, 44(6): 50–53.
Mao J F, Wu A H, Wu G Q, et al. Integral-type sliding mode control for PMSM with power variable rate reaching law method[J]. Electric Drive, 2014, 44(6): 50–53. |
| [20] |
张晓光, 赵克, 孙力.
永磁同步电动机混合非奇异终端滑模变结构控制[J]. 中国电机工程学报, 2011, 31(27): 116–122.
Zhang X G, Zhao K, Sun L, et al. Hybrid nonsingular terminal sliding mode control for permanent magnet synchronous motor drive system[J]. Proceedings of the CSEE, 2011, 31(27): 116–122. |
| [21] |
郑剑飞, 冯勇, 陆启良.
永磁同步电机的高阶终端滑模控制方法[J]. 控制理论与应用, 2009, 26(6): 697–700.
Zheng J F, Feng Y, Lu Q L. High-order terminal sliding-mode control for permanent magnet synchronous motor[J]. Control Theory and Applications, 2009, 26(6): 697–700. |
| [22] |
常雪剑, 刘凌, 崔荣鑫.
永磁同步电机非奇异快速终端可变边界层滑模控制[J]. 西安交通大学学报, 2015, 49(6): 53–59.
Chang X J, Liu L, Cui R X. A nonsingular fast terminal sliding mode controller with varying boundary layers for permanent magnet synchronous motors[J]. Journal of Xi'an Jiaotong University, 2015, 49(6): 53–59. DOI:10.7652/xjtuxb201506009 |
| [23] |
常雪剑, 彭博, 刘凌, 等.
新型非奇异终端滑模观测器的永磁同步电机无传感器控制[J]. 西安交通大学学报, 2016, 50(1): 85–91.
Chang X J, Peng B, Liu L, et al. A novel nonsingular terminal sliding mode observer for permanent magnet synchronous motors[J]. Journal of Xi'an Jiaotong University, 2016, 50(1): 85–91. DOI:10.7652/xjtuxb201601014 |
| [24] |
徐世许, 马建敏.
不确定MIMO线性系统的全局快速终端滑模控制[J]. 信息与控制, 2011, 40(5): 633–638.
Xu S X, Ma J M. Global fast terminal sliding mode control of uncertain MIMO linear systems[J]. Information and Control, 2011, 40(5): 633–638. |
| [25] | Wang L M, Chen J C, Zheng H, et al. Global fast terminal sliding mode control for direct drive XY table by permanent magnet linear synchronous motor[C]//Chinese Control and Decision Conference. Piscataway, NJ, USA:IEEE, 2011:1221-1225. |
| [26] | Yu S, Yu X, Man Z. Robust global terminal sliding mode control of SISO nonlinear uncertain systems[C]//Proceedings of 39th IEEE Conference on Decision and Control. Piscataway, NJ, USA:IEEE, 2000:2198-2203. |
| [27] | Morel F, Lin S X, Retif J M, et al. A comparative study of predictive current control schemes for a permanent magnet synchronous machine drive[J]. IEEE Transactions on Industrial Electronics, 2009, 56(7): 2715–2728. DOI:10.1109/TIE.2009.2018429 |