



1 引言
永磁同步电机(PMSM)由于具有高功率密度、功率高、高可靠性及结构简单等优点[1],被广泛应用于工业生产和国防航天等领域.然而PMSM是一个多变量、强耦合的非线性系统,存在电流耦合、系统参数摄动及物理限制等诸多不利因素[2],这些都严重制约着PMSM速度控制性能的提高,因此寻求合适的控制方法对PMSM性能的提升显得尤为迫切.
在PMSM速度控制中需要研究两个问题:首先是控制方法的研究,其次是基于该方法的抗饱和策略的研究.
针对控制方法的研究:通过总结学者们的研究发现,在众多控制方法中,PI控制由于其结构简单、对模型依赖度低的优点被广泛应用于永磁同步电机控制中[3-4],但是其非线性调节能力不足的缺点使得基于PI控制方案的PMSM很难在速度精度需求较高的场合有所作为[5-7].为此学者将滑模变结构控制[8](SMC)引入到PMSM的控制中并取得良好的控制性能,滑模变结构控制是非线性控制方法的一种,它对系统内部参数和外部干扰都具有良好的鲁棒性,同时具有较高的稳态控制精度[9-12],因此目前逐渐成为电机控制领域的研究热点.但是,抖振问题的存在严重制约滑模控制技术在电机控制中的应用,因为高频抖振能够诱发系统未建模特性,影响系统控制性能,严重时能够导致系统崩溃.为此,研究人员也提出了各种削弱抖振的方案.文[13-14]分别将二阶滑模控制算法应用于PMSM速度控制中,削弱了传统的一阶滑模控制中存在的抖振问题;文[15]在二阶滑模的基础上提出“次优算法”——二阶滑模控制方法,并将其应用于PMSM速度控制中,进一步克服了滑模控制的“抖振”问题;文[16]提出一种新型滑模趋近律用于改善系统抖振.这些方法虽取得一定的效果,但并不理想,大多数方法在一定程度上削弱了抖振,但是系统的其它性能并没有明显的提高,并且没有涉及抗饱和控制,因此不具备太大的实践意义.
针对抗饱和策略的研究:电机是一个物理受限的被控对象也就是说电机能够承受的电流是有限的,超过这个界限将会对系统造成破坏.需要指出的是抗饱和策略依赖于控制方案,两者必须有机的结合才能获得良好的控制效果,目前关于抗饱和策略的研究,学者的成果主要集中在PI控制的基础上研究相应的抗饱和策略,包括Anti-Reset Windup[17-18]方法、条件积分方法,反馈抑制抗饱和方案等,但是基于滑模控制的抗饱和策略研究不足.
将包括神经网络、自适应等新型控制方法与滑模控制相结合并在此基础上研究抗饱和策略成为解决以上面临的问题的一个重要途径.在这一领域,目前涌现出一些研究成果:文[19]研究了基于径向基神经网络终端滑模控制方法,并将其应用于永磁同步电机的位置控制中,降低了系统模型不精确对控制性能的影响.文[20]提出了基于神经网络的自适应滑模控制,该方法在PMSM位置控制中取得良好的动态性能和鲁棒性.但是总结来说这些研究主要是集中在对电机的位置控制,对PMSM速度控制的研究不足同时没有研究与之相对应的抗饱和策略.
本文提出滑模控制抗饱和控制方法:一方面使用神经网络与滑模进行结合用于削弱系统的抖振同时提高系统的响应速度;另一方面通过改变滑模面的设计并且根据控制器的设计来设计分离型反馈抑制抗饱和策略降低饱和效应对系统超调的影响.仿真表明该方法用在PMSM速度控制中能够获得良好的控制效果.
2 滑模控制方法设计传统滑模控制一般由等效控制和切换控制组成,而其中的切换控制是造成抖振的主要原因,本文用神经网络代替切换控制达到削弱甚至消除系统抖振的目的,同时引入PI并行控制避免系统陷入局部最优解.本文控制结构图如图 1所示.

|
| 图 1 滑模控制结构图 Figure 1 Sliding mode control structure |
表面式PMSM的系统状态模型为
|
(1) |
式中,id、iq、ud、uq表示d、q轴定子电流、电压,ω表示转子角速度,Rs、L表示定子电阻和电感,ψf、J代表转子磁链、转动惯量,TL代表负载转矩,pn表示极对数,B表示系统的摩擦因数.
但是这种方法建立系统模型是不精确的:一方面,它忽略了永磁体阻尼、铁芯饱和及其它不确定因素;另一方面,电机运行过程中存在的负载扰动、系统摩擦也决定系统具有非线性的特性.考虑神经网络尤其是RBFNN具有逼近任意非线性的能力[21],因此本文将该网路引入到系统建模和控制中建立如下系统模型:
|
(2) |
为方便表示,下文用α代替
这里将包括摩擦、扰动及模型不确定性部分用神经网络进行估计.针对PMSM速度控制问题,在矢量控制框架下采用id=0的双闭环控制策略,其中电流环采用PI控制方法,控制结构框图如图 2所示.

|
| 图 2 PMSM的控制框图 Figure 2 Control block diagram for PMSM |
从图 2可以看出本文方法速度环的输出就是电流环iq给定的,而对于PMSM来说,系统能够承受的电流是有限的,并且这个限制会恶化系统控制性能,主要是增大系统超调和稳态误差,因此需要对速度控制器的设计进行抗饱和处理.总结来说:控制目标是在存在饱和限制的情况下设计带有抗饱和措施的速度控制器,获得良好的速度跟踪性能.
假设需跟踪速度为w*,定义速度跟踪误差:
|
(3) |
设计滑模面:
|
(4) |
当系统运动滑模面上时满足:
|
(5) |
结合式(2)、式(3)、式(5)可以设计系统的等效控制为
|
(6) |
神经网络由于其良好的非线性逼近能力、强大的自组织自学习能力及易于硬件实现等优点,相比于BP神经网络,RBFNN具有更快的训练速度,因此逐渐被引入到实时控制系统.本文将RBFNN与滑模控制相结合,以滑模面作为网络的输入,利用RBFNN的输出代替滑模控制的切换控制,其结构图如图 3所示.

|
| 图 3 神经网络控制结构图 Figure 3 Neural network control structure |
神经网络的相关结构表达式为
|
(7) |
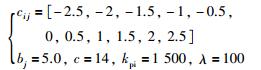
式中,cij和bj代表隐含层神经元的中心和宽度,W和H代表网络的权值向量和径向基函数向量.同时如果用W*和ξ表示神经网络的理想权值向量和逼近误差,则式(2)中的Δnn可以表示为
|
(8) |
虽然RBFNN有一系列的优点,但是容易陷入局部最优解是一个不容忽视的缺点.本文引入PI并行控制,通过2.5小节的证明可以看出,PI并行控制的引入有效地避免系统陷入局部最优解.
由于滑模面本身就是比例积分型滑模面,因此并行控制可以设计如下:
|
(9) |
根据图 1滑模控制结构图及2.3小节和2.4小节设计,控制器可以表示为
|
(10) |
为了使得神经网络能够快速并且准确地逼近系统的未建模部分,需要对网络进行训练,也就是寻找合适的网络权值,为此首先定义神经网络权值误差:

|
(11) |
采用直接李亚普诺夫方法设计神经网络权值更新率,选取李亚普诺夫函数为
|
(12) |
那么:
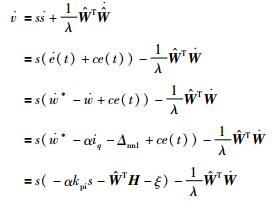
|
(13) |
选择:

|
(14) |
那么:
|
(15) |
当参数选取满足αkpi

针对系统抗饱和问题,假设PMSM所能承受的物理上下限是ilim+和ilim-,简单的抗饱和方案是在速度环的输出加一个饱和限制,即:

|
(16) |
这种方法中积分控制作用的存在容易造成系统超调变大,因此可以考虑通过减弱这一部分的积分来改善系统的超调.
分析控制器设计:
|
(17) |
从该表达式可以看出控制器部分的设计包含积分部分kpic∫e(τ)dτ,该项是导致系统超调的主要原因,因此本文抗饱和策略的设计的思路是:一方面从内部着手,改变滑模面的设计降低积分部分对系统性能的影响;另一方面是从外部着手,在完成控制器设计后增加改进型的反馈抑制抗饱和策略.
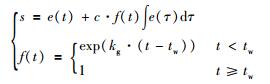
3.1 改变滑模面的设计因为系统的超调主要来源于系统的积分部分,而系统之所以选择比例积分的设计方式,主要是为了削弱系统的抖振,同时降低系统的静态误差.考虑到本文用神经网络代替滑模的切换项已经达到削弱甚至消除系统抖振的目的,所以对滑模的积分部分进行改变对抖振不会有影响;同时引入积分来降低系统的静差,主要作用在系统到达稳态后,而饱和效应主要来源系统到达稳态前,根据以上分析自然想到设计时变的滑模面,在未到达稳态时,使用小的积分项增益,到达稳态后使用较大的积分项增益,表达式为
|
(18) |
可以看出在设计滑模面时引入指数型增益,同时为了满足设计要求,kg需要较大的值,式中tw表示系统到达稳态的时间,需要通过实验或仿真确定.
3.2 改进反馈抑制抗饱和策略传统的反馈抑制抗饱和策略一般是在PI控制基础上设计的,目的是使控制器的积分环节的输出保持在线性范围内,从而使系统饱和输出性能能够接近无饱和限制下的线性输出,其原理框图如图 4所示.

|
| 图 4 基于PI的反馈抑制抗饱和策略 Figure 4 Feedback inhibition anti-windup strategy based on the PI control |
从图 4可以看出这种方法采用反馈补偿的方式降低系统的积分效应,但是这种方法是将比例积分环节同时进行补偿,在控制中没能发挥比例环节的作用,补偿不具有针对性,因此补偿效果一般.本文采用将比例积分补偿进行分离,该方法在发挥比例环节的作用的同时降低系统的输出饱和对系统性能的影响,其原理框图如图 5所示.

|
| 图 5 改进型的抗饱和策略 Figure 5 Improved anti-window strategy |
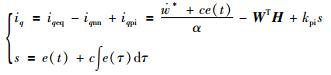
从图 5可见,本文方法将不含有积分的环节(包括等效控制和PI并行控制中的比例部分)单独分离出来施加反馈抑制控制,同时为了降低饱和效应的影响,还在控制器中设计全局反馈抑制抗饱和策略.其表达式为
当iq=iqn时:

|
(19) |
当iq≠iqn时:

|
(20) |
其中,式中ks为抗饱和增益,iqeq、iqpiqi和iqnn分别代表本文提出的滑模控制的等效控制、PI并行控制的比例部分、积分部分和神经网络控制.之所以将前两者单独分离是因为它们不涉及积分项,而后两者包含积分部分.通过后面的仿真可以发现本文提出的抗饱和策略能够有效地降低系统的超调,同时能够减小系统的稳态误差.
4 仿真验证仿真从两个角度说明本文提出的算法在PMSM速度控制中的有效性:首先将本文提出的滑模控制方法(以下称SMC)与文[22]提出的SMC进行对比,说明撇开抗饱和策略,本文提出的控制方法本身具有优良的控制性能;其次通过比较饱和限制策略、反馈抑制抗饱和本文提出的抗饱和策略的仿真效果,证明本文提出的抗饱和策略的优越性能.
仿真采用的电机参数:

|
(21) |
本文控制方法的相关参数为
|
(22) |
仿真中电流环采用PI控制,比例积分系数为
|
(23) |
仿真设定的跟踪速度为

|
(24) |
仿真1 控制方法的对比
本文与文[22]提出SMC仿真效果对比如图 6和表 1所示.

|
| 图 6 速度跟踪误差效果对比 Figure 6 Comparison of speed tracking error |
由图 6和表 1可以看出,文[22]在一定程度上削弱了抖振,并且通过调节参数可以获得一定的效果,但是分析可知该方法在调节时间和系统超调之间存在不可调和的矛盾,而本文提出的方法引入RBFNN的控制具有强大的自学习能力和收敛速度快的优点,使得该方法不仅消除了抖振,同时还达到同步提高稳态精度和降低响应时间的目的.
仿真2 抗饱和策略对比
考虑电机的承受能力,饱和限制阈值设计为

|
(25) |
根据仿真测试发现该方法的到达稳态时间约为0.01 s,因此将滑模面的积分项的参数设计为

|
(26) |
有关反馈抑制抗饱和策略的参数设计为

|
(27) |
由图 7和表 2的数据对比可以看出:在PMSM速度控制中引入饱和限制后会出现如下现象:首先,相比于未加入任何抗饱和措施的控制方法,饱和限制的存在将增长系统的调节时间,这是因为饱和限制的存在限制了系统的控制输入,导致施加在系统的能量不足,因此系统的响应速度变慢;另一方面,相比于单纯加入饱和限制或者反馈抑制抗饱和方案,本文提出的抗饱和策略能更进一步降低系统的超调,同时具有更高的稳态精度.

|
| 图 7 抗饱和策略效果对比 Figure 7 Comparison of anti-windup strategy |
| 性能对比 | 调节时间 | 超调量 | 稳态误差 |
| 饱和限制 | 0.014 s | 7% | 4.3 rad/s |
| 积分抑制抗饱和 | 0.08 s | 2.5% | 2.3 rad/s |
| 本文方案 | 0.08 s | 0.3% | 0.23 rad/s |
首先为了说明本文方案的稳态精度,定义指标:
|
其中,tws和t分别表示稳态误差积分的起始时间和结束时间,其中积分的起始时间必须在系统到达稳态后,结合图 5的仿真结果可以选择:

|
稳态误差的积分值曲线如图 8所示.

|
| 图 8 稳态误差对比 Figure 8 Comparison of steady-state errors |
从图 8可以看出三者的稳态误差(曲线斜率)分别为:4.3 rad/s、2.3 rad/s和0.23 rad/s,这表明本文提出的抗饱和策略能够有效降低系统的稳态误差.
电流环作为系统的内环,对系统控制性能有很大的影响,为了说明本文提出的方法的性能,这里给出q轴电流分量的对比图(图 9).由图 9可以看出:本文提出的方法启动迅速,反应在图中体现在开始q轴电流分量大,同时本文电流曲线在0.02 s以后相比于对比文献的方法波动小,而在电机系统中,电流的稳定对系统硬件的冲击小,因而可以说明本方法更具有工程价值.

|
| 图 9 q轴电流分量对比 Figure 9 Comparison of q axis current |
总结以上仿真可以看出:本文提出的滑模控制本身具有良好的性能,同时能与抗饱和方案有机结合,适用于PMSM速度控制.
5 结束语针对PMSM的速度控制问题,本文提出了滑模控制抗饱和控制.首先,使用RBFNN代替滑模控制的切换项有效地消除了滑模的抖振问题,同时神经网络强大的自适应、自学习能力及收敛速度快的优点使得控制系统具有良好的动态性能;其次,本文在滑模控制的基础上提出适合的抗饱和策略实现降低系统超调和提高稳态精度的目的.仿真结果表明该方法在PMSM调速中具有良好的稳态和动态性能.
致谢: 感谢中国科学技术大学信息科学实验中心提供的软硬件服务.| [1] | Liu Y, Zhou B, Fang S. Sliding mode control of PMSM based on a novel disturbance observer[C]//4th IEEE Conference on Industrial Electronics and Applications. Piscataway, NJ, USA:IEEE, 2009:1990-1994. http://en.cnki.com.cn/Article_en/CJFDTOTAL-ZGDC201009013.htm |
| [2] |
楚远征, 郭强强, 祁世民, 等.
永磁同步电机的新型滑模抗饱和控制研究[J]. 电机与控制应用, 2016, 43(9): 38–43.
Chu Y Z, Guo Q Q, Qi S M, et al. Study of novel sliding mode control with anti-windup for permanent magnet synchronous motor[J]. Electric Machine & Control Application, 2016, 43(9): 38–43. |
| [3] | Zhang D, Li H, Collins E G. Digital anti-windup pi controllers for variable-speed motor drives using FPGA and stochastic theory[J]. IEEE Transactions on Power Electronics, 2006, 21(5): 1496–1501. DOI:10.1109/TPEL.2006.882342 |
| [4] | Espina J, Arias A. Speed anti-windup PI strategies review for field oriented controlof permanent magnet synchronous machines[C]//2009 CPE'09 Compatibility and Power Electronics. Piscataway, NJ, USA:IEEE, 2009:279-285. http://ieeexplore.ieee.org/document/5279238/ |
| [5] |
王淑莲, 孙辉, 张聿成, 等.
二次调节节能系统非线性PID控制器设计[J]. 液压与气动, 2004(9): 17–18.
Wang S L, Sun H, Zhang Y C, et al. The design of nonlinear PID controller basis of secondary regulationenergy-saving system[J]. Chinese Hydraulics & Pneumatics, 2004(9): 17–18. |
| [6] | Lai C K, Shyu K K. A novel motor drive design for incremental motion system via sliding-mode control method[J]. IEEE Transactions on Industrial Electronics, 2005, 52(2): 499–507. DOI:10.1109/TIE.2005.844230 |
| [7] |
郑泽东, 李永东, 肖曦, 等.
永磁同步电机负载转矩观测器[J]. 电工技术学报, 2010, 25(2): 30–36.
Zheng Z D, Li Y D, Xiao X, et al. Load torque observer of permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2010, 25(2): 30–36. |
| [8] |
高为炳.
变结构控制理论及设计方法[M]. 北京: 科学出版社, 1996: 225-234.
Gao W B. Variable structure control theory and design method[M]. Beijing: Science Press, 1996: 225-234. |
| [9] | McCann R, Islam M S, Husain I. Application of a sliding-mode observer for position and speed estimation in switched reluctance motor drives[J]. IEEE Transactions on Industry Applications, 2001, 37(1): 51–58. DOI:10.1109/28.903126 |
| [10] | Zhang C F, Wang Y N, He J. Variable structure intelligent control for PM synchronous servo motor drive[J]. Proceedings of the CSEE, 2002, 22(7): 13–17. |
| [11] | Liu Y, Zhou B, Fang S. Sliding mode control of PMSM based on a novel disturbance observer[C]//2009 ICIEA 20094th IEEE Conference on Industrial Electronics and Applications. Piscataway, NJ, USA:IEEE, 2009:1990-1994. http://en.cnki.com.cn/Article_en/CJFDTOTAL-ZGDC201009013.htm |
| [12] | Tong K, Zhang X, Zhang Y, et al. Sliding mode variable structure control of permanent magnet synchronous machine based on a novel reaching law[J]. Proceedings of the CSEE, 2008, 21(28): 102–106. |
| [13] | Damiano A, Gatto G L, Marongiu I, et al. Second-order sliding-mode control of DC drives[J]. IEEE Transactions on Industrial Electronics, 2004, 51(2): 364–373. DOI:10.1109/TIE.2004.825268 |
| [14] |
孙宜标, 杨雪, 夏加宽.
基于二阶滑模的永磁直线同步电机的鲁棒速度控制[J]. 电工技术学报, 2008, 22(10): 35–41.
Sun Y B, Yang X, Xia J K. Robust speed control of permanent-magnet linear synchronous motor based onthe second order sliding mode[J]. Transactions of China Electrotechnical Society, 2008, 22(10): 35–41. |
| [15] | Pisano A, Davila A, Fridman L, et al. Cascade control of PM DC drives via second-order sliding-mode technique[J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 3846–3854. DOI:10.1109/TIE.2008.2002715 |
| [16] | 张晓光. 永磁同步电机调速系统滑模变结构控制若干关键问题研究[D]. 哈尔滨: 哈尔滨工业大学, 2014. Zhang X G. Research on key issuses of permanent magnet sysnchronous motor sliding mode speed control system[D]. Harbin:Harbin Institute of Technology, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014081330.htm |
| [17] |
杨明, 徐殿国, 贵献国.
永磁交流速度伺服系统抗饱和设计研究[J]. 中国电机工程学报, 2007, 27(15): 28–32.
Yang M, Xu D G, Gui X G. Study of AC PMSM Speed servo systemanti-windudesign[J]. Proceedings of the CSEE, 2007, 27(15): 28–32. DOI:10.3321/j.issn:0258-8013.2007.15.005 |
| [18] | March P, Turner M C. Anti-windup compensator designs for nonsalient permanent-magnet synchronous motor speed regulators[J]. IEEE Transactions on Industry Applications, 2009, 45(5): 1598–1609. DOI:10.1109/TIA.2009.2027157 |
| [19] | 齐亮. 基于滑模变结构方法的永磁同步电机控制问题研究及应用[D]. 上海: 华东理工大学, 2013. Qi L. Research and application of permanent magnet sysnchronous motor via sliding mode controlmethods[D]. Shanghai:East China University of Science and Technology, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10251-1013211518.htm |
| [20] |
李鸿儒, 顾树生.
基于神经网络的PMSM自适应滑模控制[J]. 控制理论与应用, 2005, 22(3): 461–464.
Li H R, Gu S S. Neuralnetworkbased adaptive sliding mode control for PMSM[J]. Journal of Control Theory and Applications, 2005, 22(3): 461–464. |
| [21] |
从爽.
智能控制系统及其应用[M]. 合肥: 中国科学技术大学出版社, 2013: 19-20.
Cong S. Intelligent control system and their applications[M]. Hefei: University of Science and Technology of China Press, 2013: 19-20. |
| [22] | 朱儒. 永磁同步电机矢量控制算法的设计与实现[D]. 合肥: 中国科学技术大学, 2014. Zhu R.The design and realization of space vector control of permanent magnet synchronous motor system[D].Hefei:University of Science and Technology of China, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10358-1014299519.htm |