



1 引言
经典冲击试验主要用于考核设备的冲击环境适应性.产生经典冲击波形的试验设备有冲击机、振动台等.通过振动台产生经典冲击波形具有波形精度高、重复性好、便于控制等优点,但是也有其特点即要求加速度、速度、位移都是零起始、零结束.
传统的冲击试验是一次在一个方向进行的,通常多个方向冲击要经过多次加载来完成.而实际上用多次一维运动来模拟实际所处的多维环境在许多方面存在问题.实践已经证明,一维振动试验存在着试验效应上的欠试验与试验时间上的过试验[1-3].随着试验产品的复杂性增强,可靠性要求越来越高,多维冲击控制技术在多维冲击环境模拟包括武器飞行环境模拟、机载环境模拟、爆炸环境模拟等方面有着广泛的应用前景[4].
2 经典冲击试验 2.1 试验原理及准则实际环境的冲击波形变化复杂,几乎没有两次波形完全相同的冲击.要在实验室完全重现产品所经受的实际冲击很困难,也没有必要.经典冲击试验方法采用等效损伤原理,即采用标准脉冲对产品进行冲击后产生与实际出现相一致的故障、损坏、失效的原理.在MIL、GJB、GB等标准中均有采用该方法[5-6],使用的波形是最简单且在时域中可用确定函数描述的半正弦波、后峰锯齿波和对称梯形波3种波形,并给予一定的波形容差.产品可根据实际冲击脉冲的特征,选择与其近似的一种进行试验.
2.2 振动台冲击试验振动台冲击试验系统采用计算机自动控制,能够较准确地产生一系列的冲击载荷,与规定冲击试验机的冲击试验相比,其重现性和精度都较高,在实验室也易于实现.因此,利用振动台进行冲击试验已经成为冲击模拟的一种常用方式[7-8].
采用振动台进行冲击试验时要求模拟的时域目标波形满足加速度、速度、位移均为“静止启动,静止结束”,这是因为振动台不允许末位移和末速度的存在,否则会损坏设备.显然标准冲击脉冲不能直接用于振动台加载,必须对信号进行一系列的修正补偿处理,以确保在冲击结束时台面的加速度、速度和位移恢复到静止状态[9-11].
3 冲击脉冲波形合成与补偿方法 3.1 补偿方法结合振动台冲击试验的特点,对标准冲击脉冲进行补偿时,主要考虑以下几点问题:1)在加速度已经满足零起始零结束的前提下,实现速度波、位移波的零起始零结束,并避免出现数据跳变;2)根据设备的试验能力来限定试验波形量级,判断冲击波的最大加速度、速度、位移是否超限;3)补偿后的目标数据在规定容差内[12].

|
| 图 1 衍生半正弦窗 Figure 1 Derivative half sine window |
由于原始的标准冲击脉冲加速度波本身满足起始段和结束段均为零的条件,因此只需对速度波和位移波进行加窗补偿;同时考虑到振动台的位移通常是正负向对称的,对位移波进行了对称平移处理;最后将信号放大至需要的量级.补偿方法具体实现如下:
a) 将标准脉冲的起始段和结束段补零形成完整冲击波形,作为原始波;积分求取速度波和位移波,经积分得到的速度、位移的末值不为零,需分别进行补偿修正.
b) 加速度加窗:利用一种衍生半正弦窗,该窗函数主波段为平顶窗,减小对主脉冲段波形的影响.计算速度末值,对加速度波加窗修正,在实现速度波零结束的同时可保持主脉冲段波形不失真.
c) 速度补偿:采用类似的方式对速度波形进行补偿,可实现位移波零结束.
d) 位移修正:考虑到补偿完的位移波形通常会偏向一边,为了最大程度利用振动台的试验能力,采用位移对称修正方法,将位移波形平移并加平顶窗滤波,直到位移波形正负向基本对称.
e) 信号放大:利用补偿后的位移反算出速度和加速度;根据设定的脉冲峰值计算放大系数,将信号放大到需要的量级.
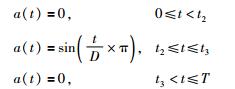
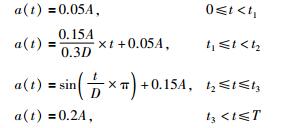
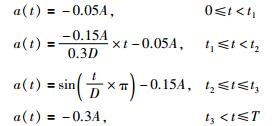
3.2 容差在GJB150.18-86及GJB150.18A-2009中分别对冲击试验中所使用的冲击脉冲的时域允差要求,以半正弦为例,如图 2所示[13-14].分别对波形的容差上下限进行计算和数据合成,采用分段函数可表达为[15]

|
| 图 2 标准半正弦冲击波形及GJB容差 Figure 2 Standard half sine shock and GJB tolerance |
标准波:
|
容差上限:
|
容差下限:
|
其中,A为脉冲峰值,D为脉冲宽度,T为波形持续总时间,且t2-t1=0.3D,t3-t2=D.以峰值加速度0.5 g,脉冲宽度20 ms,持续时间2 s,采样率2.048 kS/s的半正弦波为例,采用前面提到的方法进行补偿后的脉冲波形套入国军标容差后如图 3所示.其中,补偿完的波形完全处于规定的容差限以内,最大速度0.031 2 m/s,最大位移-2.658 2 mm.

|
| 图 3 补偿后的半正弦波及GJB容差 Figure 3 Compensated half sine wave and GJB tolerance |
一维经典波形冲击控制采用时域波形再现技术,可以在振动试验台上简单方便地以稳定的精度再现加速度冲击波形.这种方法通过给定的时间历程加速度波作为目标信号,发送时间历程波对应的驱动信号到振动台同时采集振动台的响应加速度,在线辨识振动台系统的传递函数,通过由小到大不同量级的迭代,不断计算更新驱动信号,最后实现期望的波形再现[16-18].控制流程如图 4所示.

|
| 图 4 波形控制流程图 Figure 4 Waveform control flow chart |
多维经典波形冲击控制与一维类似,但这时系统不再是单输入单输出的,而是多输入多输出(简称MIMO)系统.此时系统的传递函数不再是一个函数,而是传递函数矩阵的形式,描述如下[19-21]:

|
(1) |
其中,Y(ω)∈Cl表示系统l个输出信号,U(ω)∈Cm表示系统m个输入即驱动信号,H(ω)∈Cl×m表示系统的传递函数矩阵.
同时,系统按输入输出功率谱密度关系表示如下:

|
(2) |
其中,Suy(ω)∈Cl×m表示输入与输出的互谱矩阵,Syy(ω)∈Cl×l表示输出功率谱密度矩阵,Suu(ω)∈Cm×m表示输入功率谱密度矩阵.
根据以上公式可计算得到系统的传递函数矩阵H(ω)=Suy(ω)Suu-1(ω),在已知传递函数逆矩阵情况下可由式(1)推出驱动信号的频谱,并在试验过程中根据实际测量到的响应数据与目标数据间的偏差不断修正驱动信号,最后得到期望的响应.具体的控制算法流程如图 5所示.

|
| 图 5 多维波形再现控制算法流程图 Figure 5 Flow chart of multidimensional waveform reproduction control algorithm |
利用第3节提到的冲击脉冲波形补偿方法可得到满足振动台冲击试验加载要求的经典冲击波形,并将该时域加速度波作为多维波形控制器的目标信号,结合多维电动激振试验平台来实现多维经典冲击控制.
5.1 多维冲击控制器多维经典冲击控制器系统的主要功能是利用多维波形控制算法实现多维时间历程波的再现.采用上下位机的结构模式,其中上位机为冲击控制软件,下位机为数采主要用于驱动数据输出与响应数据输入,控制器系统的硬件配置如下:
a) 研华工控机IPC-610H
b) 4槽机箱PXIe-1071
c) 数采卡PXI-6254
● 16位A/D
● 32路AI输入
● 1 MS/s(多通道),1.25 MS/s(单通道)
d) 数采卡PXI-6733
● 16位D/A
● 8路AO输出通道
● 输出电压范围:-10 V~+10 V
● 更新速率1 MS/s
e) 接线盒及BNC线缆
5.2 多维经典冲击控制效果利用冲击脉冲波形补偿软件、多维波形再现控制器、多维电动激振系统、传感器等搭建了多维经典冲击控制试验系统如图 7.选用三台激振器分别用于X、Y、Z三个轴向的冲击激振加载,将控制器的3个输出通道(驱动)与多维激振器系统中的三台功放对应相连.同时用3只加速度传感器,安装于3个激振器的激振方向,与控制器的采集通道分别相连,用于测量响应加速度信号.

|
| 图 6 控制器系统 Figure 6 Controller system |

|
| 图 7 多维经典冲击控制试验系统 Figure 7 Multidimensional classical impact control test system |
在试验设备能力范围内选择试验用冲击波形参数,设置试验用半正弦冲击波形参数如图 8,三轴向采用一致的冲击波形,其峰值加速度10 g、脉宽5 ms、波形持续时间约0.8 s,计算得到最大速度0.16m/s,最大位移-5.43 mm.同时,设定系统控制频宽为20 Hz~1 500 Hz,系统采样频率为5 120 Hz,测量通道的加速度灵敏度100 mv/g.

|
| 图 8 试验用半正弦波 Figure 8 Half sine wave used in experiment |
首先控制器发出宽频随机信号并采集响应信号计算得到系统频响函数矩阵如图 10,矩阵左对角线代表了3个轴向的系统特性.经过几次迭代修正后得到三轴经典冲击控制效果如图 11(a).接着采用相同的冲击波形参数,改用后峰锯齿波和对称梯形波进行试验,得到控制结果分别如图 11(b)、图 11(c)所示.

|
| 图 9 系统辨识用随机信号 Figure 9 Random signal for system identification |

|
| 图 10 系统频响函数矩阵 Figure 10 The frequency response function matrix of system |

|
| 图 11 3种冲击脉冲响应信号及GJB容差 Figure 11 Three shock response signals and GJB tolerance |
1) 经过补偿后的冲击脉冲能够满足GJB容差要求,并能够在振动台上进行加载;
2) 采用3种典型的冲击脉冲分别进行三轴平动的经典冲击控制试验,取得了良好的控制效果;
3) 验证了多维冲击控制算法的正确性及脉冲波形补偿方法的有效性.
6 结论多维冲击试验能够一次性实现多个方向的冲击加载,可以克服传统试验经过多次加载完成多方向冲击的不足,在方便试验夹具设计的同时还可以有效提升试验效率.此外,由于设备实际所处的冲击环境通常是多维的,研究实现多维冲击环境模拟更具有实际工程应用价值.本文提出的波形补偿方法可实现零起始零结束的脉冲数据补偿,并且补偿后的数据满足GJB容差,形成在振动试验平台上实现多维冲击的前提.结合多维波形控制器,通过三轴经典冲击试验验证了采用该方法进行多维经典冲击试验是可行的,其控制算法和功能是正确的.其中3个轴向的控制效果在主脉冲段均能够满足GJB容差要求,针对在波形前后过渡段存在的响应数据局部超差,可以从改进数据合成方法及误差修正算法等方面进一步提高控制精度.
| [1] |
李数勇.
冲击谱中过试验和欠试验的控制[J]. 装备环境工程, 2007, 4(1): 41–43.
Li S Y. Control of over test and under test in shock spectrum[J]. Equipment Environmental Engineering, 2007, 4(1): 41–43. |
| [2] |
张殿坤, 邱杰, 王建军.
多维振动环境试验技术及其应用[J]. 战术导弹技术, 2008(2): 34–37.
Zhang D K, Qiu J, Wang J J. Multi dimensional vibration environmental test technology and its application[J]. Tactical Missile Technology, 2008(2): 34–37. |
| [3] |
柳继昌, 席兰霞.
火工品冲击试验[J]. 火工品, 1994(4): 32–37.
Liu J C, Xi L X. Explosive impact test[J]. Initiators & Pyrotechnics, 1994(4): 32–37. |
| [4] |
张建华.
航天产品的爆炸冲击环境技术综述[J]. 导弹与航天运载技术, 2005(3): 30–36.
Zhang J H. Overview of the environmental impact of the explosion of aerospace products[J]. Missile and Space Vehicle, 2005(3): 30–36. |
| [5] |
王贡献, 褚德英, 张磊.
舰船设备冲击试验机研究进展[J]. 振动与冲击, 2007, 26(2): 152–183.
Wang G X, Zhu D Y, Zhang L. Research progress of ship equipment impact testing machine[J]. Journal of Vibration and Shock, 2007, 26(2): 152–183. |
| [6] |
李伯松, 贺永胜, 韩乃仁, 等.
模拟爆炸振动的冲击试验机简介[J]. 爆炸与冲击, 2002, 22(1): 79–82.
Li B S, He Y S, Han N R, et al. The introduction of impact testing machine simulation of blast vibration[J]. Explosion and Shock Waves, 2002, 22(1): 79–82. |
| [7] | 马燕, 高玉玲, 刘艳萍. 靶场冲击与振动试验的思考[C]//2010年中国电子学会可靠性分会第十五届可靠性学术年会论文集. 北京: 中国电子学会, 2010: 299-303. Ma Y, Gao Y L, Liu Y P. The range of shock and vibration test on[C]//2010 China fifteenth branch of the Institute of Electronics Reliability Reliability Symposium. Beijing:Chinese Institute of Electronics, 2010:299-303. http://cpfd.cnki.com.cn/Article/CPFDTOTAL-SODP201011001070.htm |
| [8] |
王招霞, 王剑, 樊世超.
振动试验系统在冲击响应谱试验中的应用[J]. 航天器环境工程, 2009, 26(2): 137–139.
Wang Z X, Wang J, Fan S C. Application of vibration test system in shock response spectrum test[J]. Spacecraft Environment Engineering, 2009, 26(2): 137–139. |
| [9] |
赵于鉴.
在经典冲击下电动振动台最大加速度值的能力估算分析[J]. 国外电子测量技术, 2005, 24(11): 35–37.
Zhao Y J. Analysis of maximum acceleration ability of electric vibration table under the impact of value in classical estimation[J]. Foreign Electronic Measurement Technology, 2005, 24(11): 35–37. DOI:10.3969/j.issn.1002-8978.2005.11.011 |
| [10] | 李传日, 张雷. 冲击试验加速度波形补偿的优化方法[C]//中国航空学会航空百年学术论坛可靠性工程分论坛暨可靠性工程专业委员会第9届学术年会. 北京: 中国航空学会, 2003: 322-327. Li C R, Zhang L. Optimization method of impact test acceleration waveform compensation[C]//China Aviation Society Aviation Forum Sub Forum and the Reliability Engineering Reliability Engineering Specialized Committee Ninth Annual Conference. Beijing:Chinese Society of Aeronautics and Astronautics, 2003:322-327. http://d.wanfangdata.com.cn/Conference/5302684 |
| [11] |
任燕, 阮健.
典型波形作用下电液激振器输出波形研究[J]. 中国机械工程, 2009, 20(24): 2963–2968, 3023.
Ren Y, Ruan J. Study on output waveform of electro-hydraulic vibration exciter under typical waveform[J]. China Mechanical Engineering, 2009, 20(24): 2963–2968, 3023. DOI:10.3321/j.issn:1004-132X.2009.24.014 |
| [12] |
王鹏, 夏树杰, 陈高华, 等.
机车车辆设备冲击试验波形优化补偿研究[J]. 机车电传动, 2014(1): 86–89.
Wang P, Xia S J, Chen G H, et al. Research on optimization of waveform optimization for the shock test of locomotive and rolling stock equipment[J]. Electric Drive for Locomotives, 2014(1): 86–89. |
| [13] | 国防科学技术工业委员会. GJB150. 18-86军用设备环境试验方法冲击试验[S]. 北京: 国防科学技术工业委员会, 1986. National Defense Science And Technology Industry Committee. GJB150.18-86 military equipment and environment test method impact test[S]. Beijing:National Defense Science And Technology Commission, 1986. |
| [14] | 中国人民解放军总装备部. GJB150. 18A-2009军用装备实验室环境试验方法第18部分: 冲击试验[S]. 北京: 总装备部军标出版发行部, 2009. Chinese people's Liberation Army General Armament Department. GJB150.18A-2009 military equipment laboratory environment test method eighteenth parts:impact test[S]. Beijing:Department of General Equipment Department, Ministry Of Military Standard Press, 2009. |
| [15] |
张荣, 黄含军, 黄海莹, 等.
LABVIEW下冲击试验测试信号分析模块的设计[J]. 计算机测量与控制, 2015, 23(3): 1011–1013, 1037.
Zhang R, Huang H J, Huang H Y, et al. The design of the signal analysis module of the impact test in LABVIEW[J]. Computer Measurement & Control, 2015, 23(3): 1011–1013, 1037. |
| [16] |
王和, 刘合锋, 杨飞虎.
基于能量谱的时域波形再现瞬态振动环境试验方法[J]. 动力学与控制学报, 2014, 12(3): 279–282.
Wang H, Yang H F, Liu F H. Transient vibration environment test method for time-domain waveform reconstruction based on energy spectrum[J]. Journal of Dynamics and Control, 2014, 12(3): 279–282. DOI:10.6052/1672-6553-2014-060 |
| [17] |
靳晓雄, 张帆.
时域波形再现技术在汽车道路模拟中的应用[J]. 中国工程机械学报, 2006, 4(2): 220–222.
Jin X X, Zhang F. Application of time domain waveform reconstruction technique in automobile road simulation[J]. China Journal of Engineering and Mechanical Engineering, 2006, 4(2): 220–222. |
| [18] |
于浩洋, 关广丰, 于笑平, 等.
电液振动台加速度波形再现控制算法[J]. 黑龙江工程学院学报:自然科学版, 2013, 27(1): 60–63.
Yu H Y, Guang G F, Yu X P, et al. Electric fluid acceleration vibration waveform reproduction control algorithm[J]. Journal of Heilongjiang Academy of Engineering:Natural Science Edition, 2013, 27(1): 60–63. |
| [19] |
严侠, 朱长春, 牛宝良.
多维波形再现数字控制系统研制[J]. 机床与液压, 2009, 37(6): 146–148.
Yan X, Zhu C C, Niu B L. Multi dimensional waveform reproduction digital control system[J]. Machine Tool & Hydraulic, 2009, 37(6): 146–148. |
| [20] |
徐浩, 陈怀海, 游伟倩.
多输入多输出冲击振动试验研究[J]. 振动、测试与诊断, 2010, 30(2): 143–148.
Xu H, Chen H H, You W Q. Research on multiple input multiple output impact experiments on vibration[J]. Vibration Measurement and Diagnosis, 2010, 30(2): 143–148. |
| [21] |
李向军, 缪新颖, 丁丽娜.
电动式振动台加速度智能跟踪控制[J]. 信息与控制, 2010, 39(1): 42–46, 53.
Li X J, Miu X Y, Ding L N. Intelligent tracking control of acceleration for electric shaking table[J]. Information and Control, 2010, 39(1): 42–46, 53. |