



2. 系统控制与信息处理教育部重点实验室, 上海 200240
2. Key Laboratory of System Control and Information Processing, Ministry of Education of China, Shanghai 200240, China
0 引言
工业系统的复杂性和对经济性能要求的提高,推动了先进控制技术的发展.模型预测控制(model predictive control,MPC)[1]因其有效处理多变量和约束优化问题而广泛应用于工业控制过程[2].在当前工业实际应用中,大型系统的全局优化常用分层递阶结构将多目标逐层分解,实时优化层面向全局系统的经济性能指标给出满足系统运行约束的稳态最优点.先进控制层中模型预测控制的主要任务是实现追踪设定值的同时抑制过程扰动,使系统过程在典型工况点附近运行.但当模型预测控制受到上层实时优化层指导时,上层实时优化响应过程扰动,不断地调整最优操作条件,系统状态需要在不同的工况点频繁大幅度变动.同时,随着智能制造的推广和发展,新工业系统需要适应不同生产模式变化造成的操作条件的变化.
针对实际生产中的非线性系统所产生的非凸非线性优化问题需要在每个采样周期在线求解[3-5],大量的计算负担使得非线性策略不具有实际应用性.工业过程控制需要更加实用的方法来执行复杂的建模和控制任务.多模型方法由于能够处理非线性系统大范围工况转移问题而广受关注.
在基于多模型的众多方法中[6-14],学者将预测控制应用到多模型策略中,对于控制器的简化设计和减少计算量有显著效果.多模型预测控制(multi-model predictive control,MMPC)针对不同模式下工况点所对应的线性模型分别设计预测控制器,局部预测控制器在每一采样时刻实时求解预测时域最优控制问题.多个线性控制器通过切换或合成逼近非线性控制器性能,相较于单一的线性预测控制器,往往具有更好的控制效果[6].针对不同生产安排导致的操作状态在大范围工况条件下的跳变问题,部分学者考虑将大范围操作空间分解为多个子工况空间[7-8],在局部空间内设计预测控制器,通过协调调度得到全局系统的控制,但对于划分子空间数目的确定没有明确阐述.关于多控制器的合成方法,可归结为切换和加权两种主流方式. Özkan等[8]将多模型预测控制策略应用于聚合反应器,应用准无穷时域目标方程的滚动时域方法,设计基于切换方式的多模型预测控制器,并在文[9]中首次证明了多模型预测控制直接切换方式的稳定性;文[10-12]对子模型间的切换方法提出了不同的策略,有效地减少在线计算量并且得到了良好的控制效果.文[13]提出了采用间隙度量的方法定量描述动态线性系统之间的差异,划分控制器有效区间.但针对如何减少未来状态变量在模型间转移对控制器的影响及如何提高多模型协同控制性能的问题,相关文献中还没有全面系统的研究.
针对大范围运行系统的工况转移问题[14],本文的核心思想是利用间隙度量理论确定线性模型的有效邻域,在有效邻域内设计具有稳定椭圆不变集的局部控制器;为了保证多控制器切换的稳定性,设计中间稳态点具有相互重叠的椭圆不变集;进一步地,利用网络实现状态信息在子控制器间的传递,考虑状态在不同子区间的转移对当前控制器的影响,采用N步时域的控制序列代替单一反馈控制律,加强多模型预测控制器之间的协调性,尽可能地逼近原非线性控制器性能.
1 问题描述 1.1 多工况运行问题对于一般的非线性系统控制问题,由于求解非线性优化问题需在每一采样周期求解造成大量的计算负担,可在典型工况点附近设计控制器,使系统在典型工况点附近稳定运行.实际工业过程中由于生产原料、排产计划、过程扰动等不同往往具有不同的运行工况[15].针对大范围、频繁切换的非线性系统,当系统从一种工况环境切换到另一种工况环境,使得当前工况点远离线性控制器的初始设计工况点时,控制效果会显著下降.如图 1所示.在t1时刻,工作在工况s稳态最优点EPs=(xPs,uPs)的非线性系统接收工况变化请求,切换到工况s+1的稳态最优点EPs+1=(xPs+1,uPs+1).若EPs+1=(xPs+1,uPs+1)不在稳态点EPs=(xPs,uPs)的控制器有效范围内,则难以实施有效的控制,可能会造成生产不稳定,甚至影响生产安全.为了解决多工况运行系统的平稳切换问题,本文采用的方法是在稳态点EPs=(xPs,uPs)控制器有效范围内,选取过渡稳态点Es1,Es2,…,Esn,针对过渡稳态点设计局部模型预测控制器,将状态逐次转移至稳态点EPs+1=(xPs+1,uPs+1).

|
| 图 1 多工况状态转移 Figure 1 Multi-mode state transition |
根据工业系统下不同生产模式对多模型协同控制的设计要求,利用网络信息模式交互辅助多模型预测控制器通讯,本文提出了网络化的多模型预测控制一般结构,如图 2所示.主要包括子系统分解、局部控制器设计和协调网络三个部分.与单模型预测控制算法不同,多模型协同预测控制充分考虑各子系统之间的耦合关系,局部控制器利用网络信息进行多控制器的协调[16]和切换,以提高系统的闭环控制性能.

|
| 图 2 网络信息模式下多模型协同预测控制结构 Figure 2 Multi-model coordinated predictive control structure under networked information mode |
本文的目的是设计针对大范围工况转移系统的多模型协同预测控制算法,工况s正常工作时保证系统工作在最优稳态点EPs,当系统接收到切换至其它工况稳态点运行请求时,能够保证系统平稳切换的同时提高状态转移效率、提高控制性能.
2 基于间隙度量的多模型线性近似 2.1 非线性系统的多线性模型近似考虑一般的非线性系统:
|
(1) |
其中,
设θ表示系统的调度变量.一般来说,调度变量是包含系统状态、输入、输出、扰动或其它模型参数的子集.典型的调度变量能够显性表征系统的动态特征.令Σ表示θ的变化范围,则称Σ为系统的调度空间,也称操作空间.当实时控制层求解得到不同的稳态最优解时,先进控制层的控制器设定值发生跳变.对于大范围运行工况的变化,单一的线性模型不能描述非线性系统的动态特征.因此,对应不同的最优工况点,本文采用多模型方法描述整体系统特性.
假设非线性系统(1)在两个典型工况范围内具有稳态平衡点
|
(2) |
其中,fd(·)、gd(·)分别为f(·)、g(·)的离散形式,以下简写为fd、gd.
在平衡点处,若有Jaccobi矩阵存在:
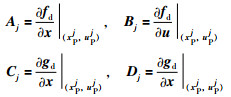
|
(3) |
则系统(1)在平衡点

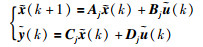
|
(4) |
其中,

|
(5) |

|
(6) |
其中,







对于实际系统的状态和控制变量的约束




|
同理,控制变量约束也可转化成相似形式.
假设1 线性模型(Aj,Bj)能控,满足约束(5)和约束(6).
假设2 非线性系统分解为子区间Ωj中的n个局部线性系统,Ωj满足:
|
(7) |
其中,int(Ωj)表示Ωj的内点.每个空间Ωj(j=1,2,…,n)都有一个线性化模型Tj近似非线性系统.
引理1[17] 若存在控制器使线性系统(4)对于原点渐近稳定,则控制器施加到非线性系统(1)后在平衡点的局部邻域内也是闭环稳定的.
基于引理1可知,合理的估计平衡点邻域是控制器设计的前提.
2.2 基于间隙度量的邻域估计多模型的基本思想是将复杂的非线性模型分解为若干简单的线性模型,目前常见的方法是使用提前选定的模型集进行测试,根据测试结果在线调整模型集的参数和个数,直到得到满意的控制效果.这种策略不仅会造成模型集的冗余,而且十分耗时[11, 18].
本节采用间隙度量的方法描述线性化模型之间的动态关系,估计线性模型代替非线性系统的有效邻域,进而将非线性系统的多工况控制问题转化为多模型系统的控制问题.
间隙度量由Zames和EI-Sakkary为了研究反馈系统的不确定性引入控制领域[19],度量值定义了(可能不稳定)线性系统之间的距离. EI-Sakkary在文[20]中证明了间隙度量比范数更适于描述线性系统之间的动态特性关系.
定义1[18] 两个具有相同输入和相同输出的有限维线性系统的系统矩阵Pi(s),i=1,2,它们的互右秩分解为Pi(s)=NiMi-1(i=1,2),则这两个系统的间隙度量为

|
(8) |
其中,P1(s)、P2(s)分别表示线性系统Ti:={Ai,Bi,Ci,Di}(i=1,2)的系统矩阵,
|
(9) |
其中,Q为H∞空间上的矩阵,H∞空间定义为在圆盘上带有范数
性质1 间隙度量的取值范围是[0, 1],数值越小表示两个系统动态特性越接近;反之,表明两个系统动态特性差异越大.如果两个线性系统完全相同,则它们的间隙度量为0.
性质2 如果两个线性系统之间的度量间隙很小,那么至少存在一个反馈控制器,使得两个系统同时稳定.
基于间隙度量的平衡点邻域估计算法如算法1所示.该算法有4个输入和2个输出.通过该算法可以量化估计平衡点的有效邻域,进而确定控制器的有效区间.
| 算法1 基于间隙度量的平衡点邻域估计算法 |
| 输入:非线性系统(1); 平衡点EP=(xP,uP); 间隙度量阈值η; 取点间隔Δx; 1.对非线性系统(1)的平衡点EP=(xP,uP),按式(3)求线性模型,记为T:={A,B,C,D}; 2.在平衡点EP=(xP,uP)附近约束范围内选择足够大的区域Φ; 3.在Φ内按间隔Δx均匀取点{x1,x2,…,xM}; 4.在非线性系统(1)上分别线性化{x1,x2,…,xM},记为Sh:={Ah,Bh,Ch,Dh},h=1,2,…,M; 5.按式(8)和式(9)计算Sh与T的间隙度量ηh=η(Sh,T); 6.将间隙度量ηh≤η的状态点聚类,组成平衡点的初选邻域Φ; 7.采用对称多边形  近似不规则图形Φ; 近似不规则图形Φ;8.用线性不等式方程组  表示多边形 表示多边形 ; ;输出:平衡点的线性模型T:={A,B,C,D}; 线性不等式方程组  |
根据引理1和间隙度量的性质2可知,在线性不等式方程组

注1 间隙度量阈值的选择具有一定的主观性,阈值越小,表示聚类模型之间的差异越小.根据文[21],一般选择间隙度量阈值η∈[0.2,0.6].
3 多模型协同预测控制策略假设对于稳态运行的化工过程,在任一操作条件下具有渐近稳定平衡点EPs=(xPs,uPs).某一时刻,先进控制层接收实时优化层的最优稳态设定值发生跳变,记为EPs+1=(xPs+1,uPs+1).控制策略可表述为:若新的稳态点EPs+1=(xPs+1,uPs+1)属于在稳态点EPs=(xPs,uPs)处设计的控制器的有效范围(ΩPs,控制器的有效范围将在3.3节详述),则由控制器操纵状态变量到达新的稳态点,若不属于原稳态点EPs=(xPs,uPs)控制器的有效范围,则在新、旧稳态点间求解其它稳态点Esj=(xsj,usj),j=1,2,…,n-1,经由其它稳态点的线性模型邻域转移到新的稳态点.该问题的难点在于如何在多控制器作用下保证系统的稳定性和增加控制器间的协调,减少状态转移时间.
设稳态点


本章主要给出n个局部模型预测控制优化问题的构造及其求解算法.该方法通过预测控制算法将状态变量在子区间转移对控制律的影响考虑在内,实现子控制器控制性能的优化,提高局部模型预测控制器间的协同度.
假设3
ⅰ)在任意采样时刻k,系统状态x(k)可测;
ⅱ)各局部控制器同步;
ⅲ)一个采样周期内控制器间通讯一次,网络通讯不存在延时.
3.1 模型预测控制器设计为保证控制器的稳定性,采用无穷时域模型预测控制.设系统由稳态点


|
(10) |
其中,



为将跟踪控制问题转化为标准形式,进行坐标变换,在采样时刻k,得到性能指标:

|
(11) |
控制器



设计状态反馈
|
(12) |
其中,



在控制策略Π中,已知当前状态x(k)和当前状态所在的子区间,为了减少忽略未来状态转移造成的保守性,对时域N内采用控制律Kj(i|k),对时域N以后采用控制律Kj(N-1|k),不同的控制律Kj(i|k)对应不同的分区Ωj,即对应不同的预测模型.
对于控制律
|
(13) |
假设V满足:
|
(14) |
将式(14)从i=0到i=∞加和可得性能指标上界:

|
(15) |
控制策略Π可描述为:忽略状态变量在子区间的转移顺序,不论下一时刻状态变量在哪个子区间,与当前区间相应的状态反馈

定理1 定义标量γ>0,满足


|
(16) |
|
(17) |

|
(18) |
|
(19) |
证明

|
(20) |
写成线性矩阵不等式的形式:
|
(21) |
当1≤i < N-1时,根据式(13),采样时刻k+i时有:

|
(22) |
假设在采样时刻k+i+1对状态变量x(k+i|k)施加控制输入
|
(23) |
由式(14)、式(22)和式(23),可以得到:
|
(24) |
令

当i≥N时,假设状态只在不变集QtN-1中趋近平衡点Erj,不再发生状态在子区间的转移.同理,可由Schur补定理得到式(19).
存在约束(5)和约束(6)时,不能直接加到优化问题P1中,需要先将它们转化为线性矩阵不等式的形式,再添加到优化问题P1中进行求解.证明过程详见文[20].
考虑输入约束(5),只需存在对称矩阵Xti满足如下方程即可保证满足输入约束:
|
(25) |
其中,Xti,dd表示Xti的对角线元素.
考虑状态约束(6),只需存在对称矩阵Zi使得:

|
(26) |
其中,Zi,dd表示Zi的对角线元素.
考虑输出约束


|
(27) |
其中,Wi,dd表示Wi的对角线元素.
令

|
(28) |
其中,算法1得到的线性不等式方程组


求解该优化问题可得到Qti、Yti,从而可得到控制律
对于系统(4),在多边形邻域

|
(29) |
考虑非线性系统(1),在初始稳态点EPs=(xPs,uPs)和期望稳态点EPs+1={xPs+1,uPs+1}之间,选择n-1个中间稳态点Esj={xsj,usj},j=1,2,…,n-1.因为不仅要保证局部控制器的椭圆不变集覆盖非线性系统的操作空间,而且要保证控制器平稳切换至系统期望稳态点.所以,中间稳态点的选择至关重要.
中间稳态点的选择策略如算法2伪代码流程所示.算法有2个输入,分别是初始稳态点EPs=(xPs,uPs)和期望稳态点EPs+1=(xPs+1,uPs+1).以期望稳态点为第1个平衡点(第2行),计算线性邻域(4行~6行);将线性邻域用矩阵不等式表示,加到优化问题(29)求解邻域内的最大椭圆不变集(7行~10行);之后在椭圆不变集内找到满足优化问题(30)(可根据具体情况构造不同优化问题)的下一个平衡点(11行~13行);若不满足条件xPs∈Ψj(14行),返回第3行;否则,将j记为n.
| 算法2 中间稳态点选择策略 |
| 输入:初始稳态点EPs=(xPs,uPs); 期望稳态点EPs+1=(xPs+1,uPs+1) 1.j←0; 2.  ; ;3.Do j←j+1; 4.对Eej执行算法1; 5. Tj:={Aj, Bj,Cj,Dj}←T:={A,B,C,D}; 6.  ; ;7.将  化为矩阵不等式(25)~不等式(27)的形式,加入优化问题(29)的约束条件; 化为矩阵不等式(25)~不等式(27)的形式,加入优化问题(29)的约束条件;8.求解优化问题(29); 9. Gj←Qt0*; 10.  ; ;11.求解优化问题(30); 12.  ; ;13.  ; ;14.Until xPs∈Ψj; 15.n←j; 输出:中间稳态点  ; ;线性模型  ; ;椭圆稳定域矩阵  ; ; |
在子空间椭圆不变集Ψj内选择下一个稳态点Eej+1=(xej+1,uj+1e)=(x*,u*),可通过求解式(30)~式(32)的优化问题得到:
|
(30) |

|
(31) |

|
(32) |
该优化问题的代价函数可根据不同优化要求设计,如经济性能等.此处简化为选择椭圆不变集内距离初始稳态点xPs最近的状态点作为中间稳态点.
由算法2得到有n-1个中间稳态点的椭圆不变集如图 3所示.由于倒序设计使n个椭圆不变集互相覆盖,可实现相邻控制器间的平稳切换.

|
| 图 3 多模型椭圆稳定域 Figure 3 Multi-model elliptical stable region |
分别以期望稳态点EPs+1=(xPs+1,uPs+1)和中间稳态点Esj=(xsj,usj),j=1,…,n-1处的线性模型Tj:{Aj,Bj,Cj,Dj}为预测模型,设计无穷时域预测控制器,依次记为Cj,j=1,2,…,n.由算法2的设计步骤可知,从初始稳态点到期望稳态点之间的子区间分别为Ψn,Ψn-1,…,Ψ1.控制器Cj的稳定子空间Ψj相互重叠,如图 3所示.
多个局部控制器“合成”全局控制器时,局部控制器间通过无线网络进行通讯,实时获取局部控制器作用下状态变量的所在区间.利用网络信息交互和控制器切换策略将多个局部控制器合成为全局模型预测控制器.为了实现系统运行模式切换的稳定过渡,令控制器Cj有效区间为
|
(33) |
其中,Ωj(j=1,…,n)满足条件(7).如图 4所示,橙色椭圆域表示子区间Ω1,是期望稳态点EPs+1=(xPs+1,uPs+1)的有效稳定区域,蓝色表示子区间Ω2,绿色区域表示子区间Ωn,包含了初始稳态点EPs=(xPs,uPs).

|
| 图 4 多控制器有效区间 Figure 4 Effective region for multiple controllers |
控制器间的切换规则可描述为:对于k时刻的状态x(k),可以找到所属的子区间Ωj,满足x(k)∈Ωj,则控制器Cj被激活.在每一采样时刻,重复该策略,直至j=1,令控制器C1一直作用,不再切换,即到达目标状态EPs+1=(xPs+1,uPs+1)所在的子区间.
在采样时刻k,对于非线性系统(1),预测时域i < N-1时,若预测状态

注2 在区间Ωj内,非线性模型可用线性模型Tj:={Aj,Bj,Cj,Dj}替代并可在间隙度量衡量下保证精度.因此,当预测状态变量x(k+i+1|k)进入下一个区间时,将区间Ωj-1对应的线性模型Tj-1:={Aj-1,Bj-1,Cj-1,Dj-1}代入k+1时刻优化问题,利用时域N内的预测控制序列和预测状态序列,在k时刻的控制器求解中考虑N步时域内状态变量在控制器间的转移对控制器的影响,可以提高系统的性能.
假设4 初始时刻k0,当前系统状态x(k0)∈Ωj,j∈ξ,假设存在可行控制律



为方便描述,引入定义:
定义2[23] 设系统划分为n个线性子系统Ti,i∈ξ={1,2,…,n}、n个子区间Ωi,i∈ξ和n个控制器Ci,i∈ξ.在状态转移过程中,如果子系统Ti在子系统Tj之前,则称子系统Ti为子系统Tj的上游子系统;相应地,子系统Tj称为子系统Ti的下游子系统.
考虑实际工业生产系统的特点,默认当系统先进控制层接收设定值变化到EPs+1=(xPs+1,uPs+1)时,稳定工作在工况点EPs=(xPs,uPs).
| 算法3 网络信息模式下的多模型协同预测控制算法 |
| 输入:初始稳态点EPs=(xPs,uPs); 期望稳态点EPs+1=(xPs+1,uPs+1); 时域N值; 1.离线设计: 1.1 x(k)=xPs; 1.2 执行算法2; 1.3 得到中间稳态点Esj=(xsj,usj),j=1,…,n-1,线性矩阵Tj:={Aj,Bj,Cj,Dj},其对应的椭圆不变集矩阵Gj; 1.4 设稳态点   n,稳态点Erj=(xrj,urj)对应的线性模型和稳定域矩阵分别是Tj:={Aj,Bj,Cj,Dj}和Gj; n,稳态点Erj=(xrj,urj)对应的线性模型和稳定域矩阵分别是Tj:={Aj,Bj,Cj,Dj}和Gj;2.在线设计: 2.1 初始化 ⅰ)初始化x(k)和Uj,j∈ξ,满足假设3; ⅱ)在k0时刻,若x(k0)∈Ω1,那么对所有k>k0,一直采用控制器C1;否则,判断x(k0)所在的区间Ωj,j∈ξ,采用对应的线性模型Tj:={Aj,Bj,Cj,Dj}和控制器Cj; ⅲ)式(18)中i=1,…,N-1共同采用模型Tj(假设时域N内所有状态在区间Ωj内); 2.2 求解优化问题(28),得到状态反馈控制律Kh(0|k),Kh(1|k),…,Kh(N-1|k),h∈ζ; 2.3 将第1个控制变量  施加到原系统; 施加到原系统;2.4 根据线性矩阵  求出预测状态 求出预测状态 ∀h∈ζ; ∀h∈ζ;2.5 求出坐标平移前的预测状态序列    并发送给下游子系统,下游子系统的控制器找出状态序列中属于该子区间的状态并标记; 并发送给下游子系统,下游子系统的控制器找出状态序列中属于该子区间的状态并标记;2.6 在采样时刻k+1,每个控制器接收测量的状态变量x(k+1),激活所在子空间的控制器,下游子系统向激活的子系统发送标记过的预测状态序列: ⅰ)若  ,则控制器切换为Cj-1,令j=j-1; ,则控制器切换为Cj-1,令j=j-1;ⅱ)若x(k+1)∈Ωj,继续采用控制器Cj; ⅲ)式(18)、(19)中的线性模型按照接收信息中预测状态序列x(k+1|k),x(k+2|k),…,x(k+N|k)对应的区间模型切换; 2.7 令k=k+1,若x(k)∉Ω1返回步骤2.1;否则,转至第2.8步; 2.8 令控制器C1一直作用,全部采用线性模型T1:{A1,B1,C1,D1},不再判断和切换,系统在期望稳态点  附近工作. 附近工作. |
注3 本文中MPC的预测步长和子模型的有效区域对MPC的可行性有一定影响.根据定理1,一方面,预测步长大,预测控制优化问题求解线性矩阵不等式的个数增多,从而导致计算量增大.另一方面,预测步长大,预测过程所涵盖的子模型越多,对系统性能有所改善.因此,为了平衡控制器的计算量和精确度,MPC预测步长的选取应考虑多种因素.
定理2 已知带有约束条件(5)和约束条件(6)的非线性系统(1),对于优化问题P2,如果在初始时刻k0,系统对当前状态x(k0)具有初始可行解,那么在k≥k0时刻都具有可行解,并且闭环系统渐近稳定.
证明 首先证明递推可行性.由优化问题P2可知,只有线性矩阵不等式(17)与状态有关.由式(17)可知,


|
(34) |
由最优解的性质,优化变量P在k+1时刻的最优解P(k+1)满足:

|
(35) |
因此,
下面证明渐近稳定性.对系统(1),采样时刻k,假设已知系统状态x(k)∈Ωl,由于控制器(28)对k时刻状态x(k)可行,可假定其最优解为控制律序列{Kj*(0|k),Kj*(1|k),…,Kj*(N-1|k)}.对采样时刻k状态变量根据线性预测模型可写为
|
(36) |
那么对于采样时刻k+1,通过将采样时刻k的最优解向右移动1位,并在末尾补上Kj*(N-1|k)构造k+1时刻可行解,满足约束条件(17)~约束条件(19)、约束条件(24)~约束条件(26):

|
(37) |
因此:
|
(38) |
又有J*(k+1)≤J(k+1).因此J*(k+1)≤J*(k),闭环系统渐近稳定.
4 连续搅拌釜式反应器系统验证 4.1 控制对象模型描述连续搅拌釜式反应器系统(continuous stirred tank reactor,CSTR)作为化工生产过程中广泛应用的一种反应器,具有强非线性的特点.在本节中,将本文提出的网络信息模式下基于大范围工况转移的多模型协同预测控制算法进行验证.
假设反应器的物料是充分混合的,反应釜中发生一级不可逆放热反应,根据物料守恒和能量守恒有如下动态模型:
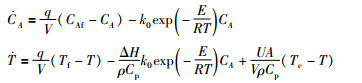
|
各参数的物理意义及数值如表 1所示.状态变量x=[CA T]T,控制变量u=Tc.具有输入变量和状态变量约束:

|
| 符号 | 物理意义 | 参数值 | 单位 |
| CA | 产物的平均反应浓度 | [0,1] | mol/L |
| T | 反应器温度 | [280,500] | K |
| Tc | 冷却液温度 | [250,500] | K |
| q | 过程参数流量 | 100 | L/min |
| V | 反应器体积 | 100 | L |
| CAf | 进料浓度 | 1 | mol/L |
| k0 | 时间常数 | 4.71×108 | min-1 |
| ΔH | 反应热 | -2×105 | J/mol |
| UA | 热交换系数 | 1×105 | J/(min·K) |
| ρ | 液体浓度 | 1×103 | g/L |
| Cp | 比热容 | 1 | J/(g·K) |
| E/R | 反应激活能 | 8 000 | K |
工况1下进料浓度CA1=0.28 mol/L,反应器温度T1=420 K.工况2下进料浓度CA2=0.52 mol/L,反应器温度T2=398.8 K,其它条件不变.设计多模型协同预测控制器实现工作状态从工况1到工况2的转移.
由图 5可知,连续搅拌釜反应器是非线性系统,由于状态变量[CA T]T都与输入Tc有单一对应关系,选择状态变量[CA T]T为操作变量,对应的状态变量约束为操作空间Σ.

|
| 图 5 CSTR稳态输入输出关系 Figure 5 Steady-state input-output map for CSTR |
局部控制器设计步骤为:
步骤1 选择目标状态[CA2,T2]T=[0.52,398.8]T作为第1个平衡点Ee1,在平衡点处进行线性化和离散化,离散时间为Td=0.03 s,得到线性模型T1:

|
其中,

|
步骤2 在平衡点附近选择一个足够大的邻域


|
| 图 6 线性模型T1的间隙度量 Figure 6 Gap metric of linear model T1 |
步骤3 选择间隙度量阈值η=0.4,聚类间隙度量值小于阈值η的状态点为邻域Φ1,如图 7所示;因为邻域Φ1为不规则图形,用图 8所示多边形对其近似,多边形区域记作

|
| 图 7 线性模型的近似邻域 Figure 7 Approximate neighbourhood of linear model |

|
| 图 8 线性模型的近似多边形邻域 Figure 8 Approximate polygon neighbourhood of linear model |
步骤4 以线性模型T1作为预测模型在邻域





|
| 图 9 线性模型的近似六边形邻域和椭圆稳定域 Figure 9 Approximate hexagon neighbourhood and elliptic stable region of linear model |
对称多面体区域
|
构造虚拟输出:
|
对称多面体区域Φ1可以通过输出约束(27)表示,添加到优化问题(29)求解最大椭圆稳定域.
步骤5 根据式(29)估计局部预测控制器1的最大椭圆不变集
步骤6 因为初始状态点不在椭圆域里,因此在Ψ1内沿初始状态的方向选择下一个平衡状态,即求解优化问题(30),得到Ee2=([0.42,407.23]T,298.97).
重复上述步骤,直到初始状态在控制器稳定域内.
最终,第3个平衡的点xe3=[0.332,415]T的椭圆稳定域Ψ3包含初始稳态点


在3个平衡点处分别设计控制器,满足假设1~假设3,控制器间通过图 2所示的网络信息相互通信,按照算法3的在线设计部分执行控制器操作.为减少控制器间的通信负担,只在算法3指定的控制器间通讯.
4.3 结果分析与讨论对连续搅拌釜反应器分别施加本文提出的多模型协同预测控制策略(N=7)和文[6]提出的多模型预测控制策略,将状态变量、输入变量和状态转移轨迹进行比较. 图 10~图 12分别表示在两种控制器作用下的状态变量[CA T]T以及输入变量Tc随时间的变化曲线.可以看到,两种控制器的闭环系统均满足平稳过渡的基本要求,且满足输入变量和状态变量约束.在每个椭圆不变集内局部控制器将状态点逐步向平衡点转移,并在达到该状态平衡点后进行控制器切换,进入下一个控制器稳定域并进行下一轮的状态转移.多模型协同预测控制器与独立的预测控制器都能够实现系统初始状态到目标状态的转移,但本文提出的算法使状态转移的反应时间减少,状态变化效率提高.对于频繁发生工况转移的实际系统,本文策略具有更好的控制性能.

|
| 图 10 闭环状态CA轨迹 Figure 10 Closed-loop state CA trajectories |

|
| 图 11 闭环状态T轨迹 Figure 11 Closed-loop state T trajectories |

|
| 图 12 输入变量轨迹 Figure 12 Input variable trajectories |
从图 12可以看出,第1次区间转移时协同预测控制器的控制输入比独立预测控制器小,而第2次区间转移协同预测控制的控制输入与第1次基本一致.降低了实际控制系统中对执行器的硬件要求. 图 13表示状态从初始


|
| 图 13 状态转移轨迹 Figure 13 State transition trajectories |
因此,本文提出的基于间隙度量的多模型协同预测控制器控制性能优于独立的多模型预测控制器,减少了控制器设计的保守性,提高了状态转移的效率.
5 结论本文提出了网络信息模式下的大范围工况运行系统多模型协同预测控制策略.针对大范围、频繁移动工况状态的非线性系统,利用间隙度量确定线性模型的有效邻域,在邻域内设计具有椭圆稳定域的预测控制器,考虑N步时域的控制序列造成的状态在子系统间的转移,减少控制器设计的保守性,并将其转化为便于求解的线性矩阵不等式形式.通过间隙度量描述线性动态系统之间的关系,解决了传统预先设置线性模型集的冗余问题.此外,可以针对不同的子操作空间,根据不同的实际需求,分别设计有效的控制器.多个子系统利用网络进行通讯和协调,保证控制器运行和切换的稳定性.最后,仿真结果表明了算法的有效性.
| [1] |
席裕庚.
预测控制[M]. 北京: 国防工业出版社, 2013: 7-8.
Xi Y G. Predictive control[M]. Beijing: National Defense Industry Press, 2013: 7-8. |
| [2] | Li S Y, Zheng Y, Lin Z. Impacted-region optimization for distributed model predictive control systems with constraints[J]. IEEE Transactions on Automation Science & Engineering, 2015, 12(4): 1447–1460. |
| [3] | Yin S, Gao H, Qiu J, et al. Adaptive fault-tolerant control for nonlinear system with unknown control directions based on fuzzy approximation[J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2017, 47(8): 1909–1918. |
| [4] | Li H, Bai L, Wang L, et al. Adaptive neural control of uncertain nonstrict-feedback stochastic nonlinear systems with output constraint and unknown dead zone[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2017, 47(8): 2048–2059. DOI:10.1109/TSMC.2016.2605706 |
| [5] |
陶洪峰, 董晓齐, 杨慧中.
离散非线性系统的迭代学习轨迹跟踪鲁棒算法优化及应用[J]. 信息与控制, 2016, 45(4): 385–390.
Tao H F, Dong X Q, Yang H Z. Robust optimization and application of iterative learning trajectory tracking algorithm for discrete nonlinear systems[J]. Information and Control, 2016, 45(4): 385–390. |
| [6] |
陶响元. 基于间隙度量的非线性系统多模型预测控制[D]. 上海: 上海交通大学, 2014. Tao X Y. Gap metric based multiple model predictive control for non-linear systems[D]. Shanghai:Shanghai Jiao Tong University, 2014. |
| [7] |
乐艳. 大范围工况系统的多模型约束预测控制算法[D]. 上海: 上海交通大学, 2004. Le Y. Multiple model-based predictive control with constrains for the plant-wide process systems[D]. Shanghai:Shanghai Jiao Tong University, 2004. |
| [8] | Özkan L, Kothare M V, Georgakis C. Control of a solution copolymerization reactor using multi-model predictive control[J]. Chemical Engineering Science, 2003, 58(7): 1207–1221. DOI:10.1016/S0009-2509(02)00559-6 |
| [9] | Özkan L, Kothare M V. Stability analysis of a multi-model predictive control algorithm with application to control of chemical reactors[J]. Journal of Process Control, 2006, 16(2): 81–90. DOI:10.1016/j.jprocont.2005.06.013 |
| [10] | Xu W, Zhang J, Zhang R. Application of multi-model switching predictive functional control on the temperature system of an electric heating furnace[J]. ISA Transactions, 2017, 68: 287–292. DOI:10.1016/j.isatra.2017.02.001 |
| [11] |
刘琳琳, 周立芳, 嵇婷, 等.
多层次多模型预测控制算法的模型切换方法研究[J]. 自动化学报, 2013, 39(5): 626–630.
Liu L, Zhou L F, Ji T, et al. Research on model switching method of multi-hierarchical model predictive control system[J]. Acta Automatica Sinica, 2013, 39(5): 626–630. |
| [12] |
杨世忠, 任庆昌.
基于在线优化的鲁棒模型预测控制[J]. 信息与控制, 2013, 42(6): 742–749.
Yang S Z, Ren Q C. Robust model predictive control based on online optimization[J]. Information and Control, 2013, 42(6): 742–749. |
| [13] | Tao X, Li N, Li S. Multiple model predictive control for large envelope flight of hypersonic vehicle systems[J]. Information Sciences, 2016, 328(C): 115–126. |
| [14] |
李少远.
全局工况系统预测控制及其应用[M]. 北京: 科学出版社, 2008: 13-14.
Li S Y. Global condition system predictive control and application[M]. Beijing: Science Press, 2008: 13-14. |
| [15] |
杨亚茹, 李少远.
切换非线性系统全局优化运行的经济预测控制[J]. 自动化学报, 2017, 43(6): 1017–1027.
Yang Y R, Li S Y. Economic model predictive control for global optimal operation of nonlinear switching systems[J]. Acta Automatic Sinica, 2017, 43(6): 1017–1027. |
| [16] | Li S, Zheng Y. Distributed model predictive control for plant-wide systems[M]. Singapore:John Wiley & Sons, Singapore Pte. Ltd, 2015:103-106. |
| [17] |
程代展, 秦化淑.
非线性系统的几何方法[J]. 控制理论与应用, 1987, 4(1): 8–16.
Cheng D Z, Qin H S. Geometric approach to nonlinear systems[J]. Control Theory and Applications, 1987, 4(1): 8–16. |
| [18] | Du J, Johansen T A. Integrated multilinear model predictive control of nonlinear systems based on gap metric[J]. Industrial and Engineering Chemistry Research, 2015, 54(22): 6002–6011. DOI:10.1021/ie504170d |
| [19] | Zames G, El-Sakkary A. Uncertainty in unstable systems:The gap metric[J]. IFAC Proceedings Volumes, 1981, 14(2): 149–152. DOI:10.1016/S1474-6670(17)63475-X |
| [20] | El-Sakkary A. The gap metric:Robustness of stabilization of feedback systems[J]. IEEE Transactions on Automatic Control, 2003, 30(3): 240–247. |
| [21] | Du J, Song C, Li P. Application of gap metric to model bank determination in multilinear model approach[J]. Journal of Process Control, 2009, 19(2): 231–240. DOI:10.1016/j.jprocont.2008.04.015 |
| [22] | Thomas J. Robust predictive control for constrained uncertain piecewise linear systems using linear matrix inequalities[J]. IFAC Proceedings Volumes, 2014, 47(1): 165–170. DOI:10.3182/20140313-3-IN-3024.00149 |
| [23] |
郑毅, 李少远.
网络信息模式下分布式系统协调预测控制[J]. 自动化学报, 2013, 39(11): 1778–1786.
Zheng Y, Li S Y. Networked cooperative distributed model predictive control for dynamic coupling systems[J]. Acta Automatica Sinica, 2013, 39(11): 1778–1786. |