



2. 黄河交通学院, 河南 焦作 454950
2. Huanghe Jiaotong University, Jiaozuo 454950, China
0 引言
网络化控制系统具有成本低、可靠性强、结构灵活等诸多优点,被广泛应用于远程医疗、机器人、航空航天等领域,但因网络的引入易产生时延、丢包等问题,这些现象的出现不仅会使控制系统的性能下降,甚至使其运行不稳定[1-3];且随着网络规模的逐渐扩大,系统的稳定性、安全性要求随之逐渐上升.因此,网络化控制系统的稳定性、故障检测及输出数据的预测问题受到专家学者们的广泛关注[4-6].
文[7]主要研究短时延网络化控制系统的稳定性问题,通过构建李亚普诺夫函数,并采用LMI来确定系统稳定的充分条件;文[8]考虑存在传感器故障的非线性时滞系统滤波器设计问题,首先建立T-S模糊模型,并基于时滞划分技术得到系统稳定的充分条件,但文[7]与文[8]中对于定理中出现的非线性项未做任何处理,因此该不等式约束不是一个严格的LMI,不能直接得到滤波器参数的设计方法.文[9]采用传统RBF(radial basis function)神经网络对发生时延的网络化控制系统进行预测,可达到收敛速度快、唯一最佳逼近等优点,但其只能是任意地选取中心矢量来构造基函数来得到自身性能,其显然不能达到满意的效果.文[10]研究带量化的网络化控制系统故障检测问题,基于获取的扩展滤波误差系统模型,选取李亚普诺夫泛函并结合LMI给出系统的稳定性充分条件;文[11]研究网络化控制系统中基于H∞观测器的控制问题,通过构建李亚普诺夫函数来得到系统稳定的充分条件,从而获得系统的H∞性能;文[12]研究存在时延给网络化控制系统带来的不确定问题,采用自回归在线预测模型对输出数据进行预测;但因网络带宽限制等因素的存在,丢包现象不可避免,因此文[10-12]对于数据丢包问题有待深入.
基于以上讨论,本文进一步研究存在传感器数据丢失的网络化控制系统的故障检测问题.首先,采用基于迭代算法的LMI得到使故障观测器稳定的充分条件,且对定理中出现的非线性项进行了适当地处理,通过添加一新的正定变量,使之成为严格地LMI;然后,将改进的RBF神经网络预测控制器对系统输出进行预测,在利用反馈校正对得到的预测输出值进行修正的基础上通过在线调整学习效率的方法来改变误差大小,从而更精确地预测输出值;并给出了故障判定准则,结合所设计的观测器对发生故障时的系统进行检测;最后通过仿真分析验证所提方法的有效性.
1 问题描述网络化控制系统主要由传感器、控制器及执行器三部分组成,结构图如图 1所示.

|
| 图 1 网络化控制系统的结构图 Figure 1 The structure chart of networked control systems |
本文仅考虑控制器到执行器间经通信网络进行数据传输,但因网络带宽有限,则不可避免地会出现数据包丢失现象.
考虑如下网络化控制系统:

|
(1) |
其中,

式(1)中,α(k)∈R为满足Bernoulli 0-1序列分布的变量,有:

|
(2) |

|
(3) |

|
(4) |
其中,数据包的丢包率α一定且0≤α≤1.
为得到主要结论,有以下假设:
1) 网络化控制系统采用基于遗忘因子法的丢包补偿策略,对较新的控制信号重视度较高,同时削弱较老控制信号的影响.
2) (A,C)完全可观测.
为消除丢包现象给系统带来的不利影响,设计了如图 2所示的网络化控制系统.

|
| 图 2 基于预测控制器的网络化控制系统结构图 Figure 2 The chart of networked control systems based on predictive controller |
图 2中,当系统发生数据丢包时,从控制器传送的系统输出数据经网络无法正常传送至执行器端,导致系统无法正常运行.此时,预测控制器开始作用,根据系统发生丢包之前的输出数据信息,采用基于RBF神经网络的预测方法预估出当前时刻的输出数据信息,从而有效地抵消了丢包给系统带来的不良影响.此外,为分析系统稳定性,根据系统丢包情况设计故障观测器.当系统正常时,观测器系统是稳定的;当系统发生故障时,又能够根据观测器对系统进行故障检测.
构造的故障观测器如下所示:
|
(5) |
其中,



考虑控制器与执行器间存在丢包,采用的状态反馈控制器为
|
(6) |
其中,
式(6)中,β(k)∈R为满足Bernoulli 0-1序列分布的变量:

|
(7) |

|
(8) |

|
(9) |
其中,数据包的丢包率β一定且0≤β≤1.
定义状态估计误差

|
(10) |
利用增广向量

|
(11) |
其中,
|
为分析系统稳定性,由式(11)可得系统无故障时的观测器误差方程为

|
(12) |
其中,
下面对系统(12)进行稳定性分析,得到定理:
定理1 对于给定标量γ(γ>0),若存在适维矩阵H、S和Q(Q>0),其中S为对称正定矩阵,使下面不等式成立:

|
(13) |
|
(14) |
|
(15) |
其中,
证明 选取正定李亚普诺夫函数

|
(16) |
由式(10)、式(12)及式(16)可得:
|
(17) |
其中,
若使系统(12)渐近稳定,需使E{ΔV(k)} < 0成立.
首先,需使下式成立:

|
(18) |

|
(19) |
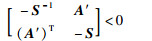
由Schur补[13]:给定常数矩阵S、Q和A,若S、Q分别为对称正定矩阵,即S=ST、Q=QT,则ATSA+Q < 0成立,当且仅当

|
式(18)可写为
|
(20) |
则式(18)小于0得证.
由Schur补引理,式(19)可写为
|
(21) |
将式(21)转化为如下形式:

|
(22) |
由引理2[14]:给定适维矩阵Y、H和E,若YT=Y、FTF≤I,则Y+HFE+ETFTHT < 0,当且仅当存在一个常数γ>0,使得Y+γHHT+γ-1ETE < 0;得下式成立:

|
(23) |
结合Schur补引理,式(23)可转化为
|
则式(21)小于0成立.
接下来需使下式成立:

|
(24) |
其中,
若式(13)成立,则式(24)成立,即E{ΔV(k)} < 0成立,系统(12)渐近稳定.
注1 由于式(15)中存在-S-1+γHHT这一非线性项,因此定理1的条件式(15)已不再为LMI.
根据文[15]的思想,添加一新的正定变量M(S-1>M),由引理1可得

|
(25) |
|
(26) |

|
(27) |
若要直接求出式(25)中非线性最小化问题的全局最优解很困难,这里采用迭代算法进行求解.基本思想为:首先将式(25)最小化,同时对式(26)进行验证,若式(26)满足,就可终止最小化过程.迭代算法如下所示:
1) 确定变量:选择合适的充分小的初值γ0及一组合适的解
2) 建立迭代关系式:求解关于式(26)和式(27)的最小化问题:

|
其中,令
3) 对迭代过程进行控制:若式(26)满足,则适当增大γ0,然后回到第一步中确定合适解的部分;若式(26)未在规定的迭代次数内满足,则退出.否则,设k=k+1,退回到第2)步.
在观测器系统稳定性得到保证后,用以下准则判断系统是否发生故障[16]:
|
(28) |
其中,第一个式子表示系统的残差信号评估函数,第二个式子表示系统的故障检测阈值;当评估函数大于阈值时,系统发生故障,反之,正常运行;L为仿真时间段大小;残差向量
为解决系统发生数据丢包时,输出数据无法通过网络传送至执行器端,导致系统不能正常运行的现象,采取预测方法对系统输出进行预测.若采用传统RBF神经网络,具有收敛速度快、唯一最佳逼近等优点,但因在选取基函数的中心来构造其性能时,只能是任意地选取中心矢量,则构造出来的性能不能达到特别满意的效果,因此在传统RBF神经网络基础上采用在线调整学习效率的方法,使选取中心矢量更准确,从而使其预测能力更强.
采用单隐含层RBF神经网络,结构图如图 3所示.

|
| 图 3 单隐含层RBF神经网络结构图 Figure 3 The structure chart of RBF neural networked with single hidden layer |
图中,

本文所选隐含层的径向基函数为反常s型函数:

|
(29) |
其中,Tj为隐含层第j个节点的中心矢量;cj为隐含层第j个节点的基宽度参数.
神经网络的误差代价函数为

|
(30) |
注2 神经网络的实际输出与预测输出间误差为ζ(k)=y(k)-y′(k),误差大,若直接将其应用到误差代价函数中,预测效果不理想.因此,为使得到的预测输出值y′(k)更精确,从而使预测误差更小,采用反馈校正对其进行修正,得Y′(k)=y′(k)+l*ζ(k),其中l为修正系数,其值为l=y(k)/y′(k).
运用迭代算法计算神经网络的中心矢量、基宽度参数和连接权向量,其中η为学习效率:
|
为得到更精确的预测输出值Y′(k),添加调整参数α(0 < α < 1)对连接权向量进行修正,修正公式为

|
(31) |
且在预测过程中采用在线调整学习效率η减少训练次数.若k时刻实际输出值与预测输出值间误差过大,则在k+1时刻适当减小η使误差变小,来得到更好的收敛性和预测效果,为观测器能够更快的检测出故障打下基础.
4 仿真分析考虑由以下参数构成的网络化控制系统[7]:

|
(1) 设系统初始状态为:[0.8 -0.8]T.给定信号传输通道参数:α=0.95,β=0.90.应用Matlab编程得观测器的增益矩阵为:L=[-10.138 5]T;然后应用Simulink仿真得到引入观测器后系统的状态响应曲线图为图 4所示.

|
| 图 4 网络化控制系统的状态响应曲线图 Figure 4 The status response curve of networked control systems |
由图 4可看出,系统状态x1、x2在0.08 s左右趋于平衡,文[2]和文[7]趋于平衡状态分别需要0.4 s左右,因此用本文方法得到的系统状态响应速度比文[2]和文[7]更具优势,且系统的稳定性更好.
(2) 当系统发生数据丢包时,给定信号传输通道参数为:1-α=0.05,1-β=0.08.此时应用Matlab编程得到系统的预测输出与实际输出图为图 5所示.

|
| 图 5 改进的RBF神经网络预测输出曲线图 Figure 5 The curve of predicted output and for improved RBF neural network |
从图 5可看出,运用本文所述的基于改进的RBF神经网络的预测控制器对系统输出进行预测,预测误差在[0 -0.04 s]之间;而运用文[12]、文[17]和文[18]所用方法得到的估计误差在[0 -0.15 s]、[0 -0.25 s]和[0 -0.7 s]之间,且与传统RBF预测,即图 6仿真结果相比较而言,预测误差大大减小,因此采用本文所述方法可实现预测误差更小,跟踪速度及精度更高的效果.说明将该预测方法应用到发生丢包的网络化控制系统中可有效抵消数据丢包给系统带来的不良影响.

|
| 图 6 传统RBF神经网络预测输出曲线图 Figure 6 The curve of predicted output for traditional neural network |
(3) 假设当系统发生阶跃型突变故障时,选定故障检测阈值ε=0.15,得到的故障检测结果仿真图如图 7所示.

|
| 图 7 故障检测结果图 Figure 7 The result diagram of fault detection |
从图 7可看出,当系统在1 s时刻左右发生故障时,残差迅速发生跳变,超过选取的检测阈值(图 6蓝点所示直线),快速有效地检测出故障的发生,检测结果较为理想.而文[11]所需时间为0.2 s,说明本文所设计的故障观测器检测故障速度更快且有效.
5 结论本文采用改进的RBF神经网络的预测控制器可有效预测出系统输出数据信息,从而补偿丢包给系统带来的不良影响.其中,在对得到的预测输出值采用反馈校正进行修正的基础上通过调整学习效率来使误差变小、训练次数减少,从而得到更好的收敛性和更快的预测速度;且当系统发生故障时,能够根据所设计的故障观测器及判定准则快速检测出故障的发生.最后的仿真结果验证了所提方法的有效性.
| [1] | Li A C, Yi S J, Wang X. New reliable H∞ filter design for networked control systems with external disturbances and randomly occurring sensor faults[J]. Neurocomputing, 2016, 185: 21–27. DOI:10.1016/j.neucom.2015.12.031 |
| [2] |
刘艳, 潘丰.
丢包网络化控制系统非脆弱量化H∞控制[J]. 信息与控制, 2016, 45(3): 320–327.
Liu Y, Pan F. Non-fragile quantized H∞ control for networked control system with packet dropouts[J]. Information and Control, 2016, 45(3): 320–327. |
| [3] |
罗小元, 李娜, 徐奎, 等.
具有随机丢包的非线性网络化控制系统鲁棒故障检测[J]. 控制与决策, 2013, 28(10): 1596–1600.
Luo X Y, Li N, Xu K, et al. Robust fault detection for nonlinear networked control systems with random packets loss[J]. Control and Decision, 2013, 28(10): 1596–1600. |
| [4] |
张晓蔚, 姜顺, 潘丰.
带有时延的网络化控制系统非脆弱H∞控制[J]. 控制工程, 2017, 24(4): 747–751.
Zhang X W, Jiang S, Pan F. Non-fragile H∞ control for networked control systems with time delay[J]. Control Engineering of China, 2017, 24(4): 747–751. |
| [5] |
龙雨强, 凌强, 郑伟.
基于事件触发的网络化控制系统的L2稳定性分析[J]. 信息与控制, 2016, 45(2): 171–176.
Long Y Q, Ling Q, Zheng W. L2 stability analysis of networked control systems based on event-triggering[J]. Information and Control, 2016, 45(2): 171–176. |
| [6] |
马伟伟, 贾新春, 张大伟.
双率采样系统的基于观测器的网络化H∞控制[J]. 自动化学报, 2015, 41(10): 1788–1797.
Ma W W, Jia X C, Zhang D W. Observer-based networked H∞control for dualrate sampling systems[J]. Acta Automatica Sinica, 2015, 41(10): 1788–1797. |
| [7] | Wu C W, Li H Y, Lam H K, et al. Fault detection for nonlinear networked systems based on quantization and dropout compensation:An interval type-2 fuzzy-model method[J]. Neurocomputing, 2016, 191: 409–420. DOI:10.1016/j.neucom.2016.01.061 |
| [8] |
魏永松, 郑毅, 李少远, 等.
面向大规模网络化系统的分布式预测控制[J]. 信息与控制, 2017, 34(8): 997–1007.
Wei Y S, Zheng Y, Li S Y, et al. Distributed predictive control for large-scale networked systems[J]. Information and Control, 2017, 34(8): 997–1007. |
| [9] |
任雯, 胥布工.
基于标准神经网络模型的非线性系统分布式无线网络化控制[J]. 控制与决策, 2015, 30(4): 691–697.
Ren W, Xu B G. Distributed wireless networked control for nonlinear system based on standard neural network model[J]. Control and Decision, 2015, 30(4): 691–697. |
| [10] |
邢伟, 孙阳, 戴良萃.
基于观测器的时延网络化控制系统稳定性[J]. 东北大学学报:自然科学版, 2014, 35(4): 457–460.
Xing W, Sun Y, Dai L C. Observer-based stability of networked control systems with time-delay[J]. Journal of Northeastern University:Natural Science, 2014, 35(4): 457–460. |
| [11] |
黄玲, 谢徐欢, 谢文博, 等.
随机非线性时滞系统的H∞滤波器设计[J]. 信息与控制, 2016, 45(1): 20–26.
Huang L, Xie X H, Xie W B, et al. H∞ filter design for class of stochastic non-linear time delay control systems[J]. Information and Control, 2016, 45(1): 20–26. |
| [12] | Bakefayat A S, Tabrizi M M. Lyapunov stabilization of the nonlinear control systems via the neural networks[J]. Applied Soft Computing, 2016, 42: 459–471. DOI:10.1016/j.asoc.2015.07.012 |
| [13] |
张勇, 王朝晖, 刘振兴.
随机传输的量化网络化系统故障检测[J]. 华中科技大学学报:自然科学版, 2013, 41(3): 63–67.
Zhang Y, Wang Z H, Liu Z X. Fault detection of quantized networked systems with stochastic transmission[J]. Journal of Huazhong University of Science and Technology:Natural Science Edition, 2013, 41(3): 63–67. |
| [14] | Liu L J, Liu X Li, Man C T, et al. Delayed observer-based H∞ control for networked control systems[J]. Neurocomputing, 2016, 179: 101–109. DOI:10.1016/j.neucom.2015.11.075 |
| [15] |
刘婷, 姜顺, 潘丰.
网络控制系统前向通道随机时延的在线多步预测[J]. 信息与控制, 2017, 46(5): 620–626.
Liu T, Jiang S, Pan F. Online multi-step prediction for the random delay of the forward channel in networked control system[J]. Information and Control, 2017, 46(5): 620–626. |
| [16] |
方园, 蒋威.
一类分数阶时滞系统的输出反馈镇定[J]. 信息与控制, 2013, 42(1): 33–38.
Fang Y, Jiang W. Output feedback stabilization for a type of fractional-order systems with delay[J]. Information and Control, 2013, 42(1): 33–38. |
| [17] |
卫一恒, 朱敏, 彭程, 等.
不确定分数阶时滞系统的鲁棒稳定性判定准则[J]. 控制与决策, 2014, 29(3): 511–516.
Wei Y H, Zhu M, Peng C, et al. Robust stability criteria for uncertain fractional order systems with time delay[J]. Control and Decision, 2014, 29(3): 511–516. |
| [18] |
黄鹤, 谢德晓, 张登峰, 等.
具有随机马尔可夫时延的网络化控制系统H∞故障检测[J]. 信息与控制, 2010, 39(1): 6–12.
Huang H, Xie D X, Zhang D F, et al. H∞ fault detection for networked control system with random Markov delays[J]. Information and Control, 2010, 39(1): 6–12. |
| [19] |
黄鹤, 谢德晓, 韩笑冬, 等.
具有随机丢包一类的网络控制系统的故障检测[J]. 控制理论与应用, 2011, 28(1): 79–86.
Huang H, Xie D X, Han X D, et al. Fault detection for networked control systems with random packet dropout[J]. Control Theory & Applications, 2011, 28(1): 79–86. |
| [20] |
罗小元, 袁园, 张玉燕, 等.
线性时滞网络化控制系统鲁棒故障检测[J]. 控制与决策, 2014, 29(11): 2048–2054.
Luo X Y, Yuan Y, Zhang Y Y, et al. Fault-detection for nonlinear time-delays networked control systems with packet dropouts and access constraints[J]. Control and Decision, 2014, 29(11): 2048–2054. |
| [21] | Kang J, Meng W J, Abraham A, et al. An adaptive PID neural network for complex nonlinear system control[J]. Neurocomputing, 2014, 135: 79–85. DOI:10.1016/j.neucom.2013.03.065 |