



2. 华中科技大学自动化学院, 湖北 武汉 430074
2. College of Automation, Huazhong University of Science and Technology, Wuhan 430074, China
0 引言
近年来,随着全球变暖的趋势及技术进步带来的可再生能源机组的成本下降,基于太阳能、风能、生物能等可再生能源机组在世界各地均得到快速发展.对于微网而言,其内部一般包含有大量基于可再生能源的分布式机组.一方面,可再生能源机组一般通过电力电子接口接入微网,具备无功补偿功能[1];另一方面,可再生能源机组在实际运行中绝大多数时间难以实现额定有功输出,因而其无功容量可用来进行无功分配.因此,可再生能源机组不但可以提供有功[2],而且可以提供无功来改善微网的电能质量及安全稳定性,如无功补偿[3]、谐波抑制[4-5]、电压的支撑与调节等[6-7].
针对配置有统一电能质量调节器的辐射状配电网,文[8]提出了一种基于粒子群优化算法的多目标规划算法来进行无功优化,通过该无功优化算法可以得到无功补偿的最优位置、最优位置上的最优无功补偿功率及统一电能质量调节器的最优参数.但该无功优化算法显然属于集中式算法,难以适应微网中分布式机组的“即插即用”特性.
文[9]认为在高渗透率分布式机组的单相辐射状微网中,电压幅值经常会越过限定值且并非总能利用三相设备在最优点进行无功补偿,因此提出可利用微网中分布式机组与无功补偿设备的协同控制来进行无功补偿,从而改善微网中的电能质量.但就本质而言,此分布式机组与无功补偿设备的协同仍属于无功补偿设备主导的集中式控制,当分布式机组与无功补偿设备的通信失效时,该无功补偿转为分散式控制.
针对高渗透率光伏发电的辐射状配电网,文[10]提出了利用光伏逆变器进行无功补偿的分散式控制框架,并在与已有的利用光伏逆变器进行无功补偿的框架进行对比的基础上,提出了一个可在光照强度快速变化的环境下提高无功补偿鲁棒性的方法.文[11]提出了一种分散式非线性自适应控制器,通过对光伏组件逆变器提供的无功功率进行优化管理来降低辐射状配电网中的线损.而文[12]则针对低压辐射状配电网,提出了光伏逆变器无功参考值的分散控制策略以提高配电网的电压质量.分散式无功优化的优点为鲁棒性强且易于实施,但一般只能得到次优结果.
近年来,基于一致性算法[13-16]的分布式无功优化算法吸引了研究人员越来越多的关注.文[17]将辐射状配电网中通过光伏逆变器控制无功补偿的问题转化为一个以最小化配电网线损为目标函数,受逆变器容量及电压幅值约束的优化问题,然后利用交替方向乘子法,提出了一个基于全局变量一致性的分布式无功优化算法.文[18]则针对辐射状配电网中利用无功补偿设备及分布式机组无功出力最小化配电网线损的非凸优化问题,利用二阶锥松弛将非凸优化问题转化为凸优化问题,并利用交替方向乘子法,提出了该问题基于一致性的分布式算法.
但分布式无功优化算法通过二阶锥松弛将非凸的无功优化问题转化为凸优化问题的前提是各节点电压相位的内在关系可由最优解直接导出,无需单独考虑,即电网拓扑应为树状,而非网状或环状.因此,目前分布式无功优化算法局限于辐射状电网,对于环状微网并不适用.
针对环状微网,文[19]将智能微网最优无功潮流问题建模为一个线性约束的二次优化问题,并将微网中的所有主体分为互有重叠的子集,利用微网中已有的允许各主体进行协同及交互的通信网络,提出了该二次优化问题的分布式算法.进一步地,文[20]先提出了一个环状微网的近似模型,然后设计了一个分布式的随机类gossip优化算法来求解配电网内的最优无功补偿.但文[19-20]并未考虑作为无功补偿源的分布式机组的无功出力限制.
本文的工作是在文[20]微网无功优化模型的基础上,研究利用分布式机组进行环状微网内的无功优化.不同于文[20],本文不但考虑了微网内的无功平衡,同时还考虑了作为无功补偿源的分布式机组的无功出力限制,并提出了相应的分布式算法来求解环状微网内的无功优化问题.
1 微网中的无功优化问题 1.1 微网模型一般而言,微网是配电网的一部分,通过静态开关或者说公共点(PCC)与配电网相连,并由许多的分布式机组及负荷组成.在本文中,不同于辐射状微网,本文考虑一个环状微网,并将该环状微网建模为一个有向图,有向图中的节点代表接入微网的分布式机组或者负荷,有向图中的边代表微网中的输电线路(参见图 1).

|
| 图 1 微网拓扑结构 Figure 1 Topology of the microgrid |
令ɡ=(ν,ε)表示一个有向图[21],其中ν表示节点的集合,ε为边的集合.不失一般性,假设ν={0,1,…,N},ε={1,2,…,Nε},节点0为电压为常值的公共点.于是,可以用邻接矩阵A来描述一个有向图的拓扑结构.矩阵A的行标记为整数0,1,…,N,矩阵A的列标记为整数0,1,…,Nε.如果一条边的标记为K(1≤K≤Nε)且起始于节点σ(0≤σ≤N)并终止于节点τ(0≤τ≤N),那么邻接矩阵A的第K列中,第σ行所对应的元素为1,第τ行所对应的元素为-1,其它行所对应的元素为0.
接下来,假设图ɡ连通,即图ɡ的任意两个节点之间存在一条路径,那么微网可以建模为[20]

|
(1) |

|
(2) |
|
(3) |
其中,u∈CN+1,u(v)表示节点v的电压,i∈CN+1,i(v)表示节点v的注入电流,i(v)表示i(v)的共轭;Z∈CNε×Nε为对角矩阵,其中的元素Zee=z(e),z(e)为线路e的阻抗;ξ∈CNε,ξ(e)为线路e上流过的电流;s∈CN+1,s(v)为节点v的注入复数功率.
将式(1)代入式(2),可得:

|
(4) |
定义对称的拉普拉斯矩阵L∈C(N+1)×(N+1)为L=AZ-1AT,于是可得注入微网的电流向量为

|
(5) |
因为图ɡ为连通图,其对应的拉普拉斯矩阵L的零空间为向量1的像空间,其中1∈RN+1且所有元素均为1,则拉普拉斯矩阵L奇异不可逆.因此需要利用矩阵L的伪逆矩阵将电压向量表示为电流向量的函数[20].
假设节点0为公共点且具有常值电压u0,根据式(5)有XLu=Xi,于是假设电压矢量u具有型式:

|
(6) |
则可推得:

|
(7) |
即矩阵XL需将向量投影到矩阵X的像空间.
要做到这一点,注意到:

|
(8) |
其中,10=(1,0,…,0).于是可知存在非奇异矩阵

|
(9) |
定义矩阵X为[20]:
|
(10) |
则有:

|
(11) |

|
(12) |
根据式(11)及式(12)可得:

|
且有:
|
从而矩阵X的惟一性及对称性均得到满足,且有:

|
因为:

|
即矩阵XL将向量投影到矩阵X的像空间,因此可以将电压矢量表示为电流向量的函数[20]:

|
(13) |
微网内的总线损可以表示为
|
(14) |
其中,ξ∈CNε,ξ(e)为线路e上流过的电流,ξH为向量ξ的共轭转置,Re Z表示取对角矩阵Z的实部.由式(1)可得Z-1ATu=ξ,将其代入式(14)有:
|
其中,拉普拉斯矩阵L=AZ-1AT,假设公共点PCC的电压值相对较大,即:即使微网内有轻微的负荷扰动,微网内的节点电压值仍可以认为等于公共点PCC的电压值u0.基于这一假设,微网内的线损可以表示为[20]
|
其中,s∈CN+1,s(v)为节点v注入的电流;p=Re s,p(v)=Re s(v)为节点v的分布式机组注入微网的有功功率;q=Im s,q(v)=Im s(v)为节点v的分布式机组注入微网的无功功率,由此可得
|
因此有1Tq=0.
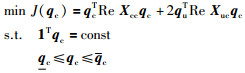
在本文中,主要考虑最优无功补偿的问题,并强调作为无功补偿源的分布式机组的无功输出是有界的,即由分布式机组注入微网的q是有界的,因此本文的无功优化问题可以表述为
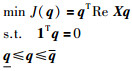
|
(15) |
其中,q,q∈RN+1,q(v)及q(v)分别为节点v的分布式机组的最小无功出力及最大无功出力.不失一般性,可将微网内的分布式机组分为分布式可控机组与不可控机组,qc∈Rm表示分布式可控机组的无功出力向量,qu∈RN+1-m表示不可控机组的无功出力向量,公共点节点0属于不可控集[20].相应地,矩阵X可以分解为
|
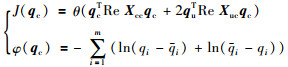
于是J(q)可以写成[20]:

|
考虑到不可控机组的无功出力为常数,所以无功优化问题(15)也可以表示为
|
(16) |
其中,qc,qc∈Rm.
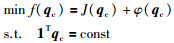
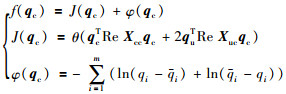
2 微网无功优化分布式算法在本文中,假设微网中的供需处于平衡状态,微网的拓扑结构已知,并且分布式可控机组知晓所有不可控机组的无功出力,在这些前提下,很自然地可以将优化问题(16)中的不等式约束利用障碍函数隐性地包含在目标函数中,从而将优化问题(16)转化为一个等式约束优化问题:
|
(17) |
其中,
|
由优化问题(17)可知,任意在迭代中的轨迹都被严格限定在其自身的可行域中,所以这种不等式约束转为等式约束的方法属于内点法,并且只有当不等式约束严格成立的时候才适用.由文[22]可知,对于优化问题(17),这种方法的近似误差不大于
优化问题(17)的拉格朗日函数可表示为

|
(18) |
其中,
|
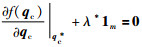
其中,λ为拉格朗日乘子.由式(18)可知,该目标函数为凸函数,因此对于给定的θ该问题有唯一的最优解.对于一个给定的足够大的θ,假设qc*为优化问题(18)的最优解且存在一个对偶可行解λ*满足Karush-Kuhn-Tucker条件:
|
(19) |
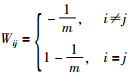
为了实现优化问题(18)的分布式求解,考虑利用微网内分布式可控机组之间的双向通信网络Γ,考虑到微网的规模一般都不大,假设任意一对可控分布式机组之间存在一条双向通信网络,并假设这些通信线路在通信网络对应的拓扑图上具有相同的权重.因此,通信网络Γ所对应的拓扑图中,线路权重均为
|
利用通信网络Γ,分布式机组i按基于一致性[24-26]的算法调节自身注入微网的无功:

|
(20) |
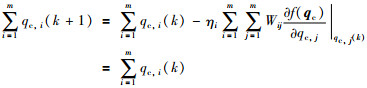
其中,ηi>0为步长,Wij为分布式机组i与分布式机组j之间通信线路所对应的权重.只要该算法的初始值qc,i(i=1,2,…,m)选取得当,则算法(20)始终满足优化问题(17)中的等式约束,这可以由式(21)推导得出:
|
(21) |
当f(qc)的梯度中的各元素收敛至相同值λ*时,各分布式可控机组的无功出力调整结束,此时即求得优化问题(17)的最优解qc*.正如前面所提到的,θ的值非常大时优化问题(17)难以求解,因此采用递进的方式来求解该问题.即先给定一个不太大的θ(k),求解优化问题(17),得到最优解qc*(k),然后增大θ(k)至θ(k+1),即减小问题的近似误差
算法1 最优无功补偿算法:

|
在本节中,利用一个构造的微网来验证所提无功优化算法的正确性.该微网为环状拓扑结构,包含10台分布式可控机组及14台不可控机组(或者负荷),图中圆圈代表分布式可控机组,三角形代表不可控机组或负荷.微网公共点的额定电压设定为230 V,额定频率50 Hz,线路电阻为0.16 mΩ/m,线路电抗为1 mΩ/m,线路长度分为100 m和200 m两种.微网拓扑及分布式可控机组参数分别示于图 1及表 1,其中p.u.表示标幺值.
| 机组 | G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 | G9 | G10 |
| 下界(p.u.) | -0.10 | -1.00 | -1.00 | -1.00 | -1.00 | -1.00 | -1.00 | -1.00 | -1.00 | -0.50 |
| 上界(p.u.) | 0.10 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 0.50 |
在以下的无功优化工况1与工况2中,不可控机组及负荷的情况均相同,即工况1与工况2有相同的无功总需求,唯一不同的是各可控机组的初始无功出力.
3.1 无功优化工况1在工况1中,分布式可控机组注入微网无功出力初始值如表 2所示,无功优化算法求得的分布式可控机组注入微网的最优无功出力示于表 3.
| 机组 | G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 | G9 | G10 |
| 初始值(p.u.) | 0.00 | 0.30 | 0.60 | 0.20 | 0.30 | 0.40 | 0.20 | 0.30 | 0.40 | 0.40 |
| 机组 | G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 | G9 | G10 |
| 最优值(p.u.) | 0.099 | 0.301 | 0.493 | 0.220 | 0.220 | 0.616 | 0.200 | 0.284 | 0.467 | 0.200 |
算法求解过程中各分布式可控机组的梯度轨迹如图 2所示,各分布式可控机组的无功出力轨迹如图 3所示,相应的目标函数值轨迹如图 4所示.

|
| 图 2 工况1可控分布式机组梯度轨迹 Figure 2 The evolutions of the gradients of controllable distributed generators in case Ⅰ |

|
| 图 3 工况1可控分布式机组无功出力轨迹 Figure 3 The evolutions of the reactive power outputs of controllable distributed generators in case Ⅰ |

|
| 图 4 工况1目标函数值轨迹 Figure 4 The evolution of objective function in case Ⅰ |
由图 2可见,各分布式机组的梯度在开始阶段变化较快,并随着迭代的进行逐步收敛到一致值0.003,由前述分析可知,此时目标函数值即微网线损达到最小.
同时,由表 2、表 3及图 3可知,大部分分布式机组的无功出力最优值较初始值均有较大幅度的变化,分布式机组G1无功出力达到上界.相应地,如图 4所示,目标函数值由0.016降至最小值0.013,由图 3中G1无功出力轨迹可知,增大G1无功出力上界可进一步降低微网线损.
3.2 无功优化工况2在工况2中,分布式可控机组注入微网无功出力初始值如表 4所示,无功优化算法求得的分布式可控机组注入微网的最优无功出力示于表 5.
| 机组 | G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 | G9 | G10 |
| 初始值(p.u.) | -0.05 | 0.60 | 0.45 | 0.50 | 0.60 | 0.85 | -0.20 | 0.30 | 0.25 | -0.20 |
| 机组 | G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 | G9 | G10 |
| 最优值(p.u.) | 0.099 | 0.301 | 0.493 | 0.220 | 0.220 | 0.616 | 0.200 | 0.284 | 0.467 | 0.200 |
算法求解过程中各分布式可控机组的梯度轨迹如图 5所示,各分布式可控机组的无功出力轨迹如图 6所示,相应的目标函数值轨迹如图 7所示.

|
| 图 5 工况2可控分布式机组梯度轨迹 Figure 5 The evolutions of the gradients of controllable distributed generators in case Ⅱ |

|
| 图 6 工况2可控分布式机组无功出力轨迹 Figure 6 The evolutions of the reactive power outputs of controllable distributed generators in case Ⅱ |

|
| 图 7 工况2目标函数值轨迹 Figure 7 The evolution of objective function in case Ⅱ |
由图 5可见,各分布式机组的梯度随着迭代的进行逐步收敛到一致值0.003,与工况1一致;同时由表 3、图 3、表 5及图 6可知,各可控机组在工况1下与工况2下有相同的最优无功出力;且由图 7可见,工况2中微网最小线损值为0.013,与工况1一致.这从另外一个侧面验证了本文所提算法的正确性.
4 结论本文主要关注环状微网中利用分布式机组进行以线损最小为目标函数的最优无功补偿,并强调微网中作为无功补偿源的分布式可控机组无功出力的有界性.针对该不等式约束优化问题,本文采用对数障碍函数将其转化为一个等式约束优化问题,基于微网中的全连通通信网络,利用基于微增率一致的分布式算法对该等式约束无功优化问题进行了求解,且该算法能够保证微网中无功的实时平衡.最后的仿真分析验证了所提分布式算法的正确性.
| [1] | Sadabadi M S, Shafiee Q, Karimi A. Plug-and-play voltage stabilization in inverter-interfaced microgrids via a robust control strategy[J]. IEEE Transactions on Control Systems Technology, 2017, 25(3): 781–791. DOI:10.1109/TCST.2016.2583378 |
| [2] | Liu B, Duan S, Cai T. Photovoltaic DC-building-module-based BIPV system-Concept and design considerations[J]. IEEE Transactions on Power Electronics, 2011, 26(5): 1418–1429. DOI:10.1109/TPEL.2010.2085087 |
| [3] | Luo A, Chen Y, Shuai Z, et al. An improved reactive current detection and power control method for single-phase photovoltaic grid-connected DG system[J]. IEEE Transactions on Energy Conversion, 2013, 28(4): 823–831. DOI:10.1109/TEC.2013.2277658 |
| [4] | D'Arco S, Ochoa-Gimenez M, Piegari L, et al. Harmonics and interharmonics compensation with active front-end converters based only on local voltage measurements[J]. IEEE Transactions on Industrial Electronics, 2017, 64(1): 796–805. DOI:10.1109/TIE.2016.2588462 |
| [5] | Micallef A, Apap M, Spiteri-Staines C, et al. Reactive power sharing and voltage harmonic distortion compensation of droop controlled single phase islanded microgrids[J]. IEEE Transactions on Smart Grid, 2014, 5(3): 1149–1158. DOI:10.1109/TSG.2013.2291912 |
| [6] | Guo F, Wen C, Mao J, et al. Distributed secondary voltage and frequency restoration control of droop-controlled inverter-based microgrids[J]. IEEE Transactions on Industrial Electronics, 2015, 62(7): 4355–4364. DOI:10.1109/TIE.2014.2379211 |
| [7] | El Moursi M S, Zeineldin H H, Kirtley J L, et al. A dynamic master/slave reactive power-management scheme for smart grids with distributed generation[J]. IEEE Transactions on Power Delivery, 2014, 29(3): 1157–1167. DOI:10.1109/TPWRD.2013.2294793 |
| [8] | Ganguly S. Multi-objective planning for reactive power compensation of radial distribution networks with unified power quality conditioner allocation using particle swarm optimization[J]. IEEE Transactions on Power Systems, 2014, 29(4): 1801–1810. DOI:10.1109/TPWRS.2013.2296938 |
| [9] | Majumder R. Reactive power compensation in single-phase operation of microgrid[J]. IEEE transactions on industrial electronics, 2013, 60(4): 1403–1416. DOI:10.1109/TIE.2012.2193860 |
| [10] | Turitsyn K, Sulc P, Backhaus S, et al. Options for control of reactive power by distributed photovoltaic generators[J]. Proceedings of the IEEE, 2011, 99(6): 1063–1073. DOI:10.1109/JPROC.2011.2116750 |
| [11] | Cagnano A, De Tuglie E, Liserre M, et al. Online optimal reactive power control strategy of PV inverters[J]. IEEE Transactions on Industrial Electronics, 2011, 58(10): 4549–4558. DOI:10.1109/TIE.2011.2116757 |
| [12] | Molina-García Á, Mastromauro R A, García-Sánchez T, et al. Reactive power flow control for PV inverters voltage support in LV distribution networks[J]. IEEE Transactions on Smart Grid, 2017, 8(1): 447–456. DOI:10.1109/TSG.2016.2625314 |
| [13] | Liu Z W, Yu X, Guan Z H, et al. Pulse-modulated intermittent control in consensus of multiagent systems[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016. DOI:10.1109/TSMC.2016.2524063 |
| [14] |
赵丹, 胡爱花, 刘丹.
牵引控制间歇通讯多智能体网络的一致性[J]. 信息与控制, 2017, 46(2): 238–242.
Zhao D, Hu A H, Liu D. Consensus of multi-agent networks with intermittent communication via pinning control[J]. Information and Control, 2017, 46(2): 238–242. |
| [15] | Guan Z H, Liu Z W, Feng G, et al. Synchronization of complex dynamical networks with time-varying delays via impulsive distributed control[J]. IEEE Transactions on Circuits and Systems Ⅰ:Regular Papers, 2010, 57(8): 2182–2195. DOI:10.1109/TCSI.2009.2037848 |
| [16] | Guan Z H, Liu Z W, Feng G, et al. Impulsive consensus algorithms for second-order multi-agent networks with sampled information[J]. Automatica, 2012, 48(7): 1397–1404. DOI:10.1016/j.automatica.2012.05.005 |
| [17] | Šulc P, Backhaus S, Chertkov M. Optimal distributed control of reactive power via the alternating direction method of multipliers[J]. IEEE Transactions on Energy Conversion, 2014, 29(4): 968–977. DOI:10.1109/TEC.2014.2363196 |
| [18] | Zheng W, Wu W, Zhang B, et al. A fully distributed reactive power optimization and control method for active distribution networks[J]. IEEE Transactions on Smart Grid, 2016, 7(2): 1021–1033. |
| [19] | Bolognani S, Zampieri S. A gossip-like distributed optimization algorithm for reactive power flow control[J]. IFAC Proceedings, 2011, 44(1): 5700–5705. DOI:10.3182/20110828-6-IT-1002.03256 |
| [20] | Bolognani S, Zampieri S. A distributed control strategy for reactive power compensation in smart microgrids[J]. IEEE Transactions on Automatic Control, 2013, 58(11): 2818–2833. DOI:10.1109/TAC.2013.2270317 |
| [21] | Biggs N. Algebraic graph theory[M]. Cambridge, UK: Cambridge University Press, 1993: 37-38. |
| [22] | Boyd S, Vandenberghe L. Convex optimization[M]. Cambridge, UK: Cambridge University Press, 2004: 565-566. |
| [23] | Li C, Yu X, Yu W, et al. Distributed event-triggered scheme for economic dispatch in smart grids[J]. IEEE Transactions on Industrial Informatics, 2016, 12(5): 1775–1785. DOI:10.1109/TII.2015.2479558 |
| [24] |
廖诗来, 潘丰.
一类多时变时延异质多智能体系统的组一致性[J]. 信息与控制, 2016, 45(5): 568–574.
Liao S L, Pan F. Group consensus of a class of heterogeneous multi-agent systems with multiple time-varying delays[J]. Information and Control, 2016, 45(5): 568–574. |
| [25] |
林瑜阳, 李钟慎.
基于连通二部图的二阶多智能体系统分组一致性分析[J]. 信息与控制, 2017, 46(1): 7–12.
Lin Y Y, Li Z S. Group consensus analysis on second-order multi-agent systems based on the connected bipartite graph[J]. Information and Control, 2017, 46(1): 7–12. |
| [26] | Liu Z W, Guan Z H, Shen X, et al. Consensus of multi-agent networks with aperiodic sampled communication via impulsive algorithms using position-only measurements[J]. IEEE Transactions on Automatic Control, 2012, 57(10): 2639–2643. DOI:10.1109/TAC.2012.2214451 |