



0 引言
近年来,基于生物学启发的多智能体系统分布式协调控制问题引起了众多研究者的广泛关注.分布式协同控制因其效率高、鲁棒性强等优点,在无线传感器网络、集群航天器深空探测、移动机器人编队控制等领域得到广泛的应用[1-2].
一致性问题是多智能体协同控制领域的基本问题,也是协调控制中的研究热点之一[3-6].多智能体系统通过各智能体之间互相协调合作进行信息传递,按照控制协议改变自身的状态,从而使各个智能体达到状态一致.领导—跟随型(leader-follower)是一种解决一致性问题的有效的设计方案[4-6]. leader是一类特殊的个体,作为群体的领导者,它不受其它个体的影响,引导着群体的运动轨迹.而follower无需知道群体目标,只有部分follower能够获取leader的信息即可.文[4]研究了具有单个领导者组成网络化系统的单目标跟踪一致性问题.文[5]和文[6]讨论了具有多个领导者的群集运动控制问题,提出了包容控制类一致性思想,设计跟随者的通信协议使得跟随者最终收敛到由领导者围成的某一目标区域内.然而,这些研究都是基于理想型系统模型,没有考虑建模不确定性、外部扰动等干扰对系统的影响.
在实际应用中,多智能体系统通常会受到干扰的影响.为了处理系统干扰,研究者们提出了许多先进的控制方法,包括自适应控制[7]、H∞鲁棒控制[8]、滑模控制[9-10]、输出调节理论[11]等.然而这些方法大多数仅考虑匹配干扰,即干扰与控制输入在同一通道中,如文[12]利用干扰的外源系统,设计了基于干扰观测器的控制方法.在多智能体系统中,常常存在异于控制输入通道进入系统的干扰,即不匹配干扰.不匹配干扰广泛存在于实际工程系统中,如多导弹系统中外风及参数时变等干扰属于不匹配干扰[13];多液压机械臂系统的电液伺服作动器中,模型参数摄动,环境干扰等直接影响活塞杆和机械臂的运动,异于控制电压通道,这也属于不匹配干扰;工业磁悬浮列车控制系统中轨道水平位置的起伏波动引起的干扰会出现在异于控制输入的通道[14].由于不匹配干扰不能直接通过反馈控制器消除,因此不匹配受扰系统的多智能体协同控制问题是一个很大的挑战.
常用的干扰抑制方法是被动抗干扰控制(passive anti-disturbance control,PADC),该方法是通过偏差调节的反馈控制,不能直接并快速地消除或抑制干扰,而且这种被动抗干扰控制是以牺牲闭环系统的标称性能为代价的[15].为此,文[15]提出基于干扰观测器的控制(disturbance observer based control,DOBC)方法.这是一种主动抗干扰控制(active anti-disturbance control,AADC)方法,利用干扰前馈补偿和输出反馈复合控制来消除干扰.一般来说,基于DOBC的复合式控制律是由反馈控制器和基于干扰观测器(disturbance observer,DO)的前馈补偿控制器组成.相比于PADC,DOBC方法有很强的处理干扰影响和增强系统鲁棒性的能力,而且不牺牲系统的标称性能[15].因此,DOBC已被广泛应用于受扰系统控制问题中[14-18].
由于不匹配干扰往往不可能将其在状态通道中通过前馈补偿完全消除,所以对于存在不匹配干扰的研究成果很少[14, 17-18].文[14]给出状态通道不匹配不确定系统主动干扰控制方法,通过设计时域干扰观测器,将干扰在输出通道中消除.文[17]研究了高阶多智能体系统不匹配干扰的分布式主动抗干扰控制方法,结合滑模控制理论和DOBC方法,实现系统的输出一致性.文[18]研究了不匹配受扰二阶多智能体系统的输出有限时间一致性问题,通过设计有限时间扩张状态观测器同时估计各智能体的干扰与未知状态,利用李亚普诺夫稳定性定理和齐次性理论证明系统有限时间收敛.
本文研究了带有不匹配干扰和参数不确定的领导—跟随型多智能体系统的协同控制问题.创新点在于设计了基于主动干扰观测器和输出反馈控制的分布式复合控制律,研究了具有不匹配干扰和参数不确定的领导—跟随型多智能体系统的输出一致性问题.
1 预备知识 1.1 代数图论假设n个节点的权重连接图用G=(V,ε,A)来表示,其中,V={v1,v2,…,vn}为n个节点的集合,节点的下标集合N={1,2,…,n};ε⊆V×V为边的集合;A=[aij]∈Rn×n为图G的权重邻接矩阵,其中矩阵元素aij表示节点vi与节点vj的连接权重.定义Ni={vj∈V|(vi,vj)∈ε}为节点vi的邻居集合.当vj∈Ni时,aij>0,否则aij=0.若对∀i,aij=aji(i,j∈N),则图G为无向拓扑图,且邻接矩阵A为对称矩阵.若对∀i,aij≠aji(i,j∈N),则图G为有向拓扑图且邻接矩阵A为非对称矩阵.
假设图G中任一节点无自环,即对于∀i∈N,aii=0.定义D为图G的度对角矩阵D=diag(d1,d2,…,dn),其中节点vi的度
定义1 如果网络化系统中的一个自主体至少存在一个邻接成员,则称之为跟随者,否则称为领导者.
1.2 重要引理引理1(Schur补)[19] 对给定的对称矩阵
(1) S<0;
(2) S11<0且S22-S12TS11-1S12<0;
(3) S22<0且S11-S12S22-1S12T<0.
引理2[20] 给定适当维数的矩阵Y、D、E,其中Y是对称的,则:

|
对于所有满足FTF≤I的矩阵F成立,当且仅当存在一个常数γ>0,使得

|
多智能体协同运动系统中,每个智能体可看作拓扑图G中的一个点,智能体与智能体之间的通信可看作是图G的边,假设一个由n个跟随者和1个领导者构成的网络化系统,其跟随者集合记为
|
其中L1∈Rn×n,L2∈Rn×1.
引理3[21] 若n个跟随者构成的网络GF为无向连通图,且至少有一个跟随者能够接受到领导者信息,则L1>0,即为正定对称矩阵.若n个跟随者构成的网络GF为有向连通图,且至少有一个跟随者能够接受到领导者信息,则L1>0,即为正定非对称矩阵.
引理4[22] 假设多项式q(s)=ρ0+ρ1s+…+ρnsn,令s=jω,则q(jω)=m(ω)+jn(ω),那么q(s)是Hurwitz稳定的当且仅当满足下列条件:
(1) m(ω)=0的根(m1<m2<…)和n(ω)=0的根(n1<n2<…)满足:

|
或者:

|
(2) m(0)n′(0)-m′(0)n(0)>0.
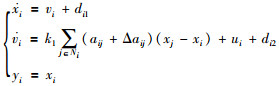
2 问题描述考虑n个跟随者和1个领导者构成的多智能体系统.带有不匹配干扰的二阶多智能体系统的动力学模型为:
对于∀i∈N={1,2,…,n}:
|
(1) |
其中,xi和vi分别是智能体i的位置状态和速度信息,ui是控制输入,yi是系统输出,Δaij是系统建模不确定性引起的通信误差项,k1>0,di1、di2分别表示不匹配干扰和匹配干扰.
注1 Δaij是系统建模不确定性引起的通信误差项,满足0<Δaij<1,可将多智能体系统构成的拓扑图G看作是随机拓扑图.
假设领导者的动力学模型为

|
(2) |
定义2 多智能体系统(1)和多智能体系统(2)实现一致性跟踪,如果对∀i∈N={1,2,…,n},满足:
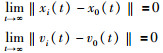
|
本文将要分别研究多智能体系统(1)的拓扑结构是无向连通和有向连通并且都存在不匹配干扰的情况下一致性性问题.
3 基于多源干扰的领导—跟随型多智能体系统的一致性分析假设1 在系统(1)中,干扰di1(t)二阶可微,di2(t)一阶可微且
注2 假设1在DOBC领域是很常见的假设[14-16].一方面,如果干扰具有很快时变,那么干扰观测器很难进行估算;另一方面,在实际应用上,有很多种干扰满足这种假设,如常值干扰、谐波干扰等[17-18].
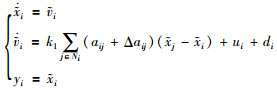
令
|
(3) |
假设2 系统(3)中干扰
对于系统(3)的干扰,由观测器估计:
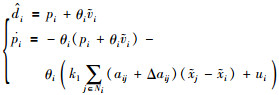
|
(4) |
其中,
定理1 若系统(3)满足假设1和假设2的条件,则干扰观测器(4)是渐近稳定的.
证明 令干扰观测器的干扰估计误差为

|
(5) |
结合系统(3)、干扰观测器(4)和干扰估计误差(5),得
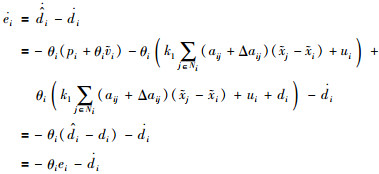
|
(6) |
令e=[e1,e2,…,en]T,d=[d1,d2,…,dn]T,Θ=diag(θ1,θ2,…,θn),则干扰估计误差为

|
(7) |
由于θi>0,因此矩阵-Θ是Hurwitz的,另有
注3 尽管本文给出的DOB干扰渐近估计结论是基于假设2的,但只要观测器的动态足够快,在选择适当的观测增益下,观测器(4)也可以估计快时变干扰[17].
注4 对式(6)的微分方程求解可得

|
(8) |
式(8)中

本节将分别研究跟随者之间是双向交流信息和单向交流信息的情况下多智能体系统的一致性跟踪问题.设领导者与跟随者之间单向通信,且至少有一个跟随者能接收到领导者发送的目标信息,每个跟随者都可接收到它邻居发送的状态信息.
为了保证二阶多智能体系统能够实现一致性跟踪,基于系统(3)和干扰观测器(4),设计分布式控制器ui为

|
(9) |
其中,k1>0,k2>0,
注5 ai0为领导者与跟随者之间的邻接权重,若跟随者能接收到领导者的信息,则ai0>0;反之ai0=0.控制器的设计是根据每一个智能体自身和其邻居的状态信息,因此可实现完全分布式设计.
定理2 假设多智能体系统的拓扑结构是无向连通网络且存在一个全局可达点,至少有一个智能体能接收到领导者发送的信息.那么系统(1)在DOBC(9)下能实现渐近一致,如果对于给定k1>0,存在正定对称矩阵P以及标量γ>0,满足:
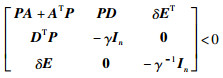
|
(10) |
其中,
|
L1为多智能系统的Laplacian矩阵且满足L1>0,δ>0.
证明 令跟踪误差

|
(11) |
令

|
(12) |
其中,L1为无向连通网络系统的Laplacian矩阵,ΔL是由系统建模不确定性引起的通信误差项.
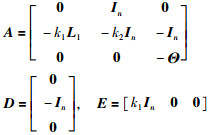
联立干扰估计误差(7),动态方程(12),得闭环系统:
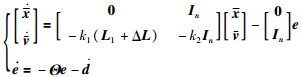
|
(13) |
即:
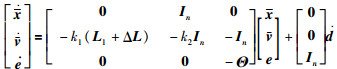
|
(14) |
由假设2知,


|
则:

|
(15) |
其中,
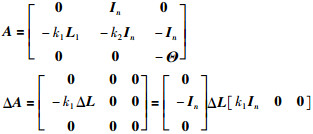
|
且ΔLTΔL≤δ2I.
若:

|
(16) |
则
将ΔA=DFE代入式(16)得

|
(17) |
其中,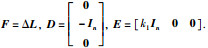
由引理(2)可知,存在一个标量γ>0,使得

|
(18) |
由Schur补引理,式(18)等价于:
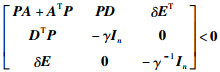
|
(19) |
由于式(19)与式(16)等价,因此多智能体系统(1)可利用干扰观测器(4)精确估计误差,并在控制器(9)下能实现渐近一致.
注6 如果系统中不存在参数不确定项,则系统(14)转变成
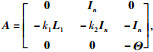

|
(20) |
解得矩阵A的特征值满足:

|
(21a) |

|
(21b) |
由干扰观测器(4)可知观测增益θi>0,因此方程(21a)的特征值-θi<0;假设μi(i=1,2,…,n)为系统Laplacian矩阵L1的特征值,方程(21b)可解得
|
(22) |
由于多智能体系统构成的拓扑图为无向连通的,因此矩阵L1为正定对称矩阵,存在正实数特征根.只要k2>0,λ必存在负实部,使得矩阵A是Hurwitz的.因此可得结论:如果系统中不存在参数不确定项,本文所设计的干扰观测器以及DOBC控制律仍能使系统渐近稳定.
式(22)由泰勒展开公式可得
注7 考虑参数不确定项干扰因素,由上述分析可知,对于式(18),存在正定对称矩阵P,使得PA+ATP<0.引理2的作用是将不可测的不确定项转换成数值极小的可知量,即式(18)中γδ2ETE+γ-1PDDTP>0,但是存在标量γ,使得该项的值近乎等于0,其中γ的作用是使得γ-1PDDTP项减小,而δ保证γδ2ETE项不会变得特别大,从而使得式(18)成立,得到条件(19).将式(19)左右各乘diag{In,In,γIn},可转变成线性矩阵不等式形式:
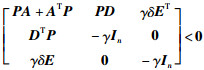
|
(23) |
由于式(23)与式(19)等价,通过Matlab工具箱中线性矩阵不等式(LMI)可以求解,当γ较大,而δ较小时,存在正定对称矩阵使得条件(10)成立.
注8 本文所提的干扰观测器是仅对干扰进行观测,考虑带有参数不确定项的领导—跟随型多智能体系统,通过设计DOBC消除不匹配干扰.文[14]则是直接考虑带有多个干扰的多输入多输出线性系统,设计复合控制律,通过设计合适的干扰补偿增益使得不匹配干扰在输出通道中消除.
注9 文[23]中针对参数不确定项引用了二次稳定[24]的概念,即系统


下面考虑系统(1)为有向连通拓扑结构且存在不匹配干扰的情况下一致性性问题.
定理3 假设多智能体系统的拓扑结构是有向连通网络且存在一个全局可达点,至少有一个智能体能接收到领导者信息.那么系统(1)在DOBC(9)下能与领导者达成渐近一致,如果:
(1) 存在正定对称矩阵P以及标量γ>0,满足条件(10),其中式(9)中矩阵L1为有向图的Laplacian矩阵;
(2) 控制增益k1>0,k2>0且满足
证明 由于系统的拓扑结构为有向连通,矩阵L1为正定非对称矩阵,其特征值为复数根,假设矩阵L1的特征值为μi=a+jb,其中a>0,j为复数单位,则在注6中求解矩阵A的特征值的过程中,式(21b)的解变成:

|
(24) |
令q(λ)=λ2+k2λ+k1(a+jb),假设λ=jω,则式(24)变成q(jω)=m(ω)+jn(ω),其中m(ω)=-ω2+k1a,n(ω)=k2ω+k1b.由于m(0)=k1a,m′(0)=0,n(0)=k1b,n′(0)=k2,可得m(0)n′(0)-m′(0)n(0)=k1k2a>0.方程m(ω)=0和n(ω)=0的解为


应用定理2的证明过程可得到条件(1),从而证明多智能体系统(1)可利用干扰观测器(4)精确估计误差,并在控制器(9)下能渐近地与领导者达成一致.
4 数值仿真例1 拓扑图是无向连通的.考虑4个跟随者和1个领导者组成的网络如图 1所示,图中智能体0为动态领导者,其余(1~4)都是无向连通的跟随者,其中智能体1和4可接收到领导者0发出的信息.假设拓扑图所有边的权重都是1,则拓扑图G的权重邻接矩阵:
|

|
| 图 1 无向连通网络拓扑图 Figure 1 The undirected connected network topologies |
系统的Laplacian矩阵为
|
其中,
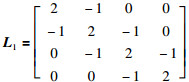
|
假设跟随者之间存在的不确定项为
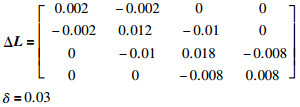
|
为了验证本文结论的有效性,根据假设1和假设2,4个智能体都受到干扰影响,智能体1:d1, 1=2tanh(t),d1, 2=2tanh2(t);智能体2:d2, 1=4tanh(t),d2, 2=4tanh2(t);智能体3:d3, 1=sigmoid(t),d3, 2=sigmoid2(t);智能体4:d4, 1=3sigmoid(t),d4, 2=3sigmoid2(t),t>0.其中di1、di2(i=1, 2, 3, 4)分别表示不匹配干扰和匹配干扰.
根据定理2的条件和评注6的分析,应用Matlab的LMI工具箱验证,将控制器的参数设置为k1=50,k2=20.由评注4可知,观测增益越大,观测器响应速度越快,因此观测器参数设置为θ1=50(智能体1),θ2=50(智能体2),θ3=50(智能体3),θ4=50(智能体4).假设4个智能体的初始位置状态,速度状态分别为x(0)=[10,15,-1,3]T,v(0)=[2,3,4,1]T.领导者的初始状态为x0(0)=5,v0(0)=2,因此,领导者为动态领导者,其动力学模型为x0=2t+5,v0=2.仿真结果如图 2所示.

|
| 图 2 干扰观测器估计(θi=50) Figure 2 The estimation of DO (θi=50) |
根据系统(3)可知,不匹配干扰转化成:d1=2,d2=4,d3=sigmoid(t),d4=3sigmoid(t). 图 2和图 3分别是观测器增益取50的情况下干扰估计值和观测器估计误差曲线,表 1是各智能体的观测器干扰估计误差统计数据,表 2则是观测增益分别在20和50下智能体1和智能体3的干扰估计误差对比数据.从上述实验结果可以得到,干扰观测器可快速精确地估算出干扰,表现出较好的跟踪性能.当观测增益取50时,干扰估计误差仅在0.2 s时就达到0.007左右,且随时间的增长,越发趋于0.相对地,当观测增益取20时,观测误差在0.5 s后才达到相应的程度.因此,观测增益越大,观测器响应速度越快.

|
| 图 3 干扰观测器估计误差(θi=50) Figure 3 The estimation errors of DO (θi=50) |
| 时间/s | 智能体1 | 智能体2 | 智能体3 | 智能体4 |
| 0.1 | 1.11e-00 | 1.65e-00 | 2.24e-00 | 5.47e-01 |
| 0.2 | -1.02e-03 | -1.52e-03 | -6.95e-03 | -1.54e-02 |
| 0.3 | 3.42e-03 | 5.03e-03 | 1.95e-03 | -1.30e-02 |
| 0.4 | 2.82e-03 | 4.15e-03 | 8.41e-04 | -1.31e-02 |
| 0.5 | -1.12e-03 | -1.63e-03 | -6.91e-03 | -1.48e-02 |
| 1.5 | -1.47e-06 | -2.18e-06 | -3.03e-03 | -8.91e-03 |
| 2 | -1.59e-07 | -2.35e-07 | -2.12e-03 | -6.24e-03 |
| 3 | -1.49e-09 | -2.21e-09 | -8.26e-04 | -2.62e-03 |
| 时间/s | 智能体1 | 智能体3 | ||
| θi=20 | θi=50 | θi=20 | θi=50 | |
| 0.1 | 5.41e-00 | 1.11e-00 | 1.10e-01 | 2.24e-00 |
| 0.2 | 8.95e-01 | -1.02e-03 | 1.81e-00 | -6.95e-03 |
| 0.3 | 1.22e-01 | 3.42e-03 | 2.36e-01 | 1.95e-03 |
| 0.4 | 1.64e-02 | 2.82e-03 | 2.14e-02 | 8.41e-04 |
| 0.5 | 1.82e-03 | -1.12e-03 | -8.02e-03 | -6.91e-03 |
| 1.5 | 5.09e-12 | -1.47e-06 | -7.68e-03 | -3.03e-03 |
图 4和图 5分别是无向连通的各智能体的位置状态轨迹图和状态误差曲线,从图 4、图 5可看出各智能体在10 s左右其位置状态即可与动态领导者的位置保持一致,因此可得系统在分布式控制律下能够有效地消除干扰,并实现渐近一致.

|
| 图 4 无向连通的各智能体位置状态轨迹图 Figure 4 The state trajectories of each agent under undirected connected |

|
| 图 5 无向连通的各智能体位置状态误差 Figure 5 The position state errors of each agent under undirected connected topology |
若不添加干扰观测器,即系统中存在干扰时,各智能体的运动轨迹结果如图 6所示.从图 6可以看出,各智能体在干扰的影响下无法跟踪到领导者.而通过本文分析和实验验证,设计干扰观测器(4),利用复合式控制律(9)可有效地消除干扰的影响,并实现跟踪一致性.

|
| 图 6 带干扰的各智能体运动轨迹 Figure 6 Movement trajectory of the agents with disturbance |
例2 拓扑图是有向连通的.考虑4个跟随者和1个领导者组成的网络如图 7所示,图中智能体0为领导者(动态或静态),其余(1~4)都是有向连通的跟随者,其中智能体1和4可接收到领导者0发出的信息.假设拓扑图所有边的权重都是1,则拓扑图G的权重邻接矩阵:
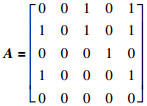
|

|
| 图 7 有向连通网络拓扑图 Figure 7 The directed connected network topologies |
系统的Laplacian矩阵为
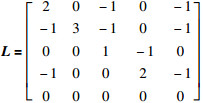
|
其中,
|
根据例1中各项参数的选取方法确定参数并进行仿真,图 8和图 9分别是观测器增益取20的情况下干扰估计值和观测器估计误差曲线,从图(9)可知干扰观测器可快速准确地估算出干扰,表现出较好的跟踪性能. 图 10和图 11分别是有向连通的各智能体的位置轨迹和状态误差曲线.从图 10和图 11可看出各智能体在8 s左右其位置状态即可与动态领导者的位置保持一致,因此可得系统在分布式控制律下能够有效地消除干扰,并实现渐近一致.

|
| 图 8 干扰观测器估计(θi=20) Figure 8 The estimation of DO (θi=20) |

|
| 图 9 干扰观测器估计误差(θi=20) Figure 9 The estimation errors of DO (θi=20) |

|
| 图 10 有向连通的各智能体位置状态轨迹图 Figure 10 The state trajectories of each agent under directed connected topology |

|
| 图 11 有向连通的各智能体位置状态误差 Figure 11 The position state errors of each agent under directed connected topology |
本文研究了带有不匹配干扰和参数不确定项的多智能体系统的输出一致性控制问题.为了估计各个智能体的干扰,设计了渐近收敛的主动干扰观测器.基于干扰前馈补偿和输出反馈控制,设计了分布式复合控制律,利用现代控制和线性矩阵不等式理论,得到了领导—跟随型多智能体系统一致性问题的充分条件.最后通过数值仿真对所提控制算法进行了有效验证.
| [1] | Chen S, Ho D W C, Huang C. Fault reconstruction and state estimator design for distributed sensor networks in multitarget tracking[J]. IEEE Transactions on Industrial Electronics, 2015, 62(11): 7091–7102. DOI:10.1109/TIE.2015.2448685 |
| [2] |
张峥, 朱炫颖.
复杂网络同步控制的研究进展[J]. 信息与控制, 2017, 46(1): 103–112.
Zhang Z, Zhu X Y. Recent progress in the synchronous control of complex networks[J]. Information and Control, 2017, 46(1): 103–112. |
| [3] | Wang F, Yang H. Containment consensus of multi-agent systems with communication noises[J]. IEEE Transactions on Automatic Control, 2016, 61(11): 3586–3592. DOI:10.1109/TAC.2016.2522647 |
| [4] | Yang H, Zhang Z, Zhang S. Consensus of second order multi-agent systems with exogenous disturbances[J]. International Journal of Robust & Nonlinear Control, 2011, 21(9): 945–956. |
| [5] | Wang F Y, Yang H Y, Liu Z X, et al. Containment control of leader-following multi-agent systems with jointly-connected topologies and time-varying delays[J]. Neurocomputing, 2017, 260(18): 341–348. |
| [6] | Yang H Y, Wang F Y, Han F J. Containment control of fractional order multi-agent systems with time delays[J/OL]. IEEE/CAA Journal of Automatica Sinica, doi: 10. 1109/JAS. 2016. 7510211. [2016-12-15]. http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=7783963. |
| [7] | Yoo S J. Distributed adaptive containment control of uncertain nonlinear multi-agent systems in strict-feedback form[J]. Automatica, 2013, 49(7): 2145–2153. DOI:10.1016/j.automatica.2013.03.007 |
| [8] |
王君, 李淑真, 李炜.
基于事件触发机制的NCS主被动混合鲁棒H∞容错控制[J]. 信息与控制, 2017, 46(2): 144–152.
Wang J, Li S Z, Li W. Hybrid active-passive robust fault-tolerant control for a networked control system based on an event-triggered scheme[J]. Information and Control, 2017, 46(2): 144–152. |
| [9] | Khoo S Y, Xie L H, Zhao S K, et al. Multi-surface sliding control for fast finite-time leader-follower consensus with high order SISO uncertain nonlinear agents[J]. International Journal of Robust & Nonlinear Control, 2015, 24(16): 2388–2404. |
| [10] |
黄健, 鲜斌.
一种基于自适应2阶终端滑模控制算法的理论和实验研究[J]. 信息与控制, 2016, 45(6): 660–665.
Huang J, Xian B. Theoretical and experimental research of adaptive second-order terminal sliding-mode controller[J]. Information and Control, 2016, 45(6): 660–665. |
| [11] | Wang X H, Xu D B, Hong Y G. Consensus control of nonlinear leader-follower multi-agent systems with actuating disturbances[J]. Systems & Control Letters, 2014, 73: 58–66. |
| [12] | Yang H Y, Zhang Z X, Zhang S Y. Consensus of second-order multi-agent systems with exogenous disturbances[J]. International Journal of Robust and Nonlinear Control, 2011, 21(9): 945–956. DOI:10.1002/rnc.v21.9 |
| [13] | Yang J, Chen W H, Li S H. Autopilot design of bank-to-turn missiles using state-space disturbance observers[C]//Ukacc International Conference on Control. Piscataway, NJ, USA: IEEE, 2012: 1-6. |
| [14] | Yang J, Zolotas A, Chen W H, et al. Robust control of nonlinear MAGLEV suspension system with mismatched uncertainties via DOBC approach[J]. ISA Transactions, 2011, 50(3): 389–396. DOI:10.1016/j.isatra.2011.01.006 |
| [15] | Li S H, Yang J, Chen W H, et al. Disturbance observer-based control:Methods and applications[M]. Boca Raton, FL, USA: CRC Press, 2014: 69-72. |
| [16] | Yang J, Li S H, Yu X H. Sliding-mode control for systems with mismatched uncertainties via a disturbance observer[J]. IEEE Transactions on Industrial Electronics, 2012, 60(1): 160–169. |
| [17] | Wang X Y, Li S H, Lam J. Distributed active anti-disturbance output consensus algorithms for higher-order multi-agent systems with mismatched disturbances[J]. Automatica, 2016, 74: 30–37. DOI:10.1016/j.automatica.2016.07.010 |
| [18] | Li G P, Wang X Y, Li S H, et al. Finite-time output feedback stabilization of second-order systems with mismatched disturbances with application to consensus[C]//IEEE International Conference on Control and Automation. Piscataway, NJ, USA: IEEE, 2016: 198-203. |
| [19] | Wang Y Y, Xie L H, De Souza C E. Robust control of a class of uncertain nonlinear systems[J]. Systems & Control Letters, 1992, 19(2): 139–149. |
| [20] | Yaz E E. Linear matrix inequalities in system and control theory[J]. Proceedings of the IEEE, 2002, 86(12): 2473–2474. |
| [21] | Diao M, Duan Z, Wen G Hi. Consensus tracking of linear multi-agent systems under networked observability conditions[J]. International Journal of Control, 2014, 87(8): 1478–1486. DOI:10.1080/00207179.2013.873950 |
| [22] | Ogata K. Discrete-time control systems[M]. Upper Saddle River, NJ, USA: Pearson, 1995: 223-255. |
| [23] | Li Z G, Duan Z S, Xie L H, et al. Distributed robust control of linear multi-agent systems with parameter uncertainties[J]. International Journal of Control, 2012, 85(8): 1039–1050. DOI:10.1080/00207179.2012.674644 |
| [24] | Khargonekar P P, Petersen I R, Zhou K. Robust stabilization of uncertain linear systems:Quadratic stabilizability and H∞control theory[J]. IEEE Transactions on Automatic Control, 2002, 35(3): 356–361. |