



0 引言
超机动是指在迎角超过失速迎角、气动舵面操纵效率下降的情况下完成机动动作的超常规机动.通过大迎角飞行并绕速度矢量滚转,从而快速改变机头指向和敌我态势. “Herbst”机动和“猫鼬”机动就是经典的超机动动作,能够实现超小半径转弯.但是超机动飞行时不仅要突破失速禁区,还需要在迎角超过甚至远大于临界失速迎角的情况完成大角速率机动,其气动力和力矩的非线性、非定常迟滞性,三轴动力学严重耦合性及飞机模型参数的快时变性[1],使得超机动飞行的气动参数及模型和外界扰动具有较大的不确定性,所以必须提高非线性控制方法[2]的鲁棒性来补偿不确定性.
非线性动态逆[2-6]是超机动最常使用的控制方法,但是动态逆方法依赖控制对象的精确模型,鲁棒性较差,这就大大限制了动态逆在超机动控制中的应用.文[7]通过引入误差的积分和微分项,在一定程度上提高了动态逆方法的鲁棒性,但是当存在较大的建模误差时,控制效果欠佳.文[8]设计了增量动态逆控制律,消除了动态逆方法对模型的依赖,但是当反馈角加速度信号存在误差时将大大降低控制律鲁棒性.文[9-10]通过引入神经网络对逆误差实时补偿,提高了控制器的鲁棒性.文[11]采用结构奇异值与动态逆相结合的方法进行了控制律设计,使得控制系统对模型参数摄动具有较强的鲁棒性.文[12-14]引入滑模观测器估计干扰力矩,提高了控制系统的鲁棒性.文[15]将准连续高阶滑模控制用到了航天器姿态跟踪,所设计的控制器有效抑制了干扰,但系统的稳态时间较长.文[16]设计非线性干扰观测器用于提高系统鲁棒性.文[17]将反步法与干扰观测器相结合,所设计的控制器能够较好地抑制干扰,但只能保证跟踪误差一致有界.文[18]针对气动参数不确定性引入自适应律,取得了良好的控制效果.
本文通过设计自适应干扰观测器来对外界扰动和建模误差进行观测和补偿,在快、慢回路中引入不连续投影参数自适应律来对不确定气动参数进行估计,基于此实现对超机动飞行的鲁棒控制,并选取了李亚普诺夫函数对整个系统的稳定性进行分析.超机动飞行的数字仿真验证了本文所设计的鲁棒控制器能够有效抑制外界扰动和建模误差及不确定气动参数引起的干扰,提高了系统的鲁棒性.
1 问题描述 1.1 超机动飞行的数学模型飞机做超机动飞行时,整个系统为一个时变的、非线性、强耦合系统.为建立飞机超机动飞行的数学模型,假设:
1) 地面坐标系是惯性坐标系,即地球是静止的.
2) 地面为一个平面,即忽略地球曲率.
3) 飞机为刚体且在飞行过程中质量不变.
4) 重力加速度为定值.
5) 飞机为对称布局,机体坐标轴系的xoz平面为飞行器的对称平面,即惯性积Ixy=Izy=0.
基于假设,飞机运动的数学模型可由12个1阶微分方程描述:
|
(1) |
|
(2) |

|
(3) |

|
(4) |

|
(5) |

|
(6) |

|
(7) |

|
(8) |

|
(9) |

|
(10) |

|
(11) |

|
(12) |
式中,x、y、z分别为飞机质心位置在地轴坐标系中的投影坐标; v、χ、γ、α、β、μ分别为飞机速度、航向角、轨迹角、迎角、侧滑角、速度矢滚转角; p、q、r分别为飞机转动角速度在机体坐标系中的分量; (X,Y,Z)、(Tx,Ty,Tz)、(L,M,N)、(LT,MT,NT)分别为飞机所受的空气动力、发动机矢量推力、空气动力力矩和发动机矢量推力力矩在飞机机体坐标系中的分量; Ix、Iy、Iz分别为飞机对机体轴系3个坐标轴的惯性矩; Izx、Ixy、Izy为惯性积,因飞机关于xoz平面对称,惯性积Ixy=Izy=0; q=0.5 ρv2, 为飞机动压; m、s、b、c分别为飞机质量、机翼面积、翼展和平均空气动力弦长.
1.2 超机动飞行快、慢回路分析根据时标分离法,将超机动飞行分为快慢两回路,快回路由[p q r]组成,方程为式(10)~式(12),慢回路由[α β μ]组成,方程为式(7)~式(9).针对超机动飞行的快、慢回路设计控制律.超机动飞行的慢回路和快回路方程可以描述为
|
(13) |
式中,Ω=[α β μ]T,α、β、μ分别为迎角、侧滑角和滚转角; ω=[p q r]T,p、q、r分别为滚转、俯仰和偏航角速度; x=[α β μ p q r]T为系统状态.
当飞机进行超机动时,其气动的非线性、不对称性、交叉耦合及迟滞特性使得气动参数具有不确定性; 当飞机受到不稳定气流影响及控制系统具有建模误差时,会产生一个总的不确定性d.通过将不确定参数提出并考虑不确定性d,式[13]可以描述为
|
(14) |
式中,θΩ∈R3为不确定气动力参数; θω∈R12为不确定气动力矩参数; A(x)和B(x)为不确定参数系数矩阵; u为快回路输入控制信号且u=[up uq ur]T=Gf(ω)[δa δe δr δy δz]T,[δa δe δr δy δz]T分别为副翼、平尾、方向舵舵面、侧向推力矢量舵面偏转角和纵向推力矢量舵面的偏转角度,为最终舵面偏转角度; θΩ、Fs(Ω)、A(x)、Gs(Ω)、θω、Ff(Ω)、B(x)、Gf(ω)分别为

|
其中,C*表示机体坐标系*轴气动力系数;
|
其中,C∘·表示∘力矩·系数,l、m、n分别表示滚转、俯仰和偏航.

|

|
本文控制目标为:设计一个基于自适应干扰观测器的超机动鲁棒控制器,有效补偿外界扰动和建模误差不确定性及不确定气动力、气动力矩带来的干扰,使得飞机姿态角Ω=[α β μ]T渐近跟踪期望的超机动指令Ωc=[αc βc μc]T,并使飞机保持良好的动态性能和稳态性能.
2 鲁棒控制器设计在慢回路设计中,输出虚拟控制信号ωc=[pc qc rc]T,使得飞机姿态角Ω=[α β μ]T稳定跟踪姿态角指令Ωc=[αc βc μc]T; 在快回路设计中,输出最终控制信号u,使飞机角速度ω=[p q r]T稳定跟踪角速度指令ωc=[pc qc rc]T.为使飞机有效补偿外界扰动和建模误差不确定性及不确定气动力、气动力矩参数带来的干扰,在鲁棒自适应控制器的设计过程中,设计自适应干扰观测器对外界扰动及建模误差等不确定性进行估计和补偿,引入自适应律对不确定气动参数进行在线估计,并对飞行控制系统整体进行稳定性分析.最后通过舵面分配算法,得到舵面偏转角度.控制器结构如图 1所示.

|
| 图 1 鲁棒自适应控制器结构图 Figure 1 The structure chart of the robust adaptive controller |
定义姿态角的跟踪误差为

|
(15) |
式中,Ωc=[αc βc μc]T为姿态角的期望指令信号,则:

|
(16) |
设计虚拟控制信号为
|
(17) |
式中,
接下来对不连续投影算子进行定义: θ∈RP是未知参数向量,




|
不连续投影自适应律具有性质:
性质1 
性质2 
现对不连续投影自适应律的性质进行证明:
由不连续投影算子的定义可得性质1成立,即
当

当
其它情况时,
综上所述,不连续投影自适应律的性质2成立.式(17)中

|
(18) |
其中,kΩ、Γ1、λΩ为待设计的正定对角矩阵.
将式(17)和式(18)代入式(16)得

|
(19) |
定义姿态角速度的跟踪误差为
|
(20) |
式中,ωc为快回路虚拟指令信号,则:

|
(21) |
设计控制信号:

|
(22) |
式中,

|
(23) |
其中, kω、Γ2、λω为待设计的正定对角矩阵.通过在非线性干扰观测器[11]中引入不确定参数自适应律设计自适应干扰观测器,来对d进行估计和补偿,设计为

|
(24) |
其中,

条件1 使系统
条件2 
本文所设计的自适应干扰观测器与文[19]中的非线性干扰观测器的不同之处在于本文所设计的观测器中含有不确定参数估计值
下面给出自适应干扰观测器收敛性的简单证明:
由文[20]得引理:
引理 对于系统:
|
假设

若
由以上证明过程可知,自适应干扰观测器的收敛性取决于
在超机动中,飞机本体参数,气动参数及各姿态角是不断变化的,但是实际飞行中,它们都是有一定的界限的.基于此,提出2个假设:
假设1 存在一个正常数ρ1,使得对于任何Ω∈UΩ(UΩ是实际飞行中Ω的取值范围)都有‖Gs(Ω)‖≤ρ1; 本文取ρ1= 
假设2 存在一个正常数ρ2,使得对于任何x∈UΩ×Uω,Uω是实际飞行中ω的取值范围,都有‖B(x)‖≤ρ2; 本文取ρ2=0.13.
考虑系统(14),在假设条件下,设计控制律为式(22),自适应律为式(18)和式(23),自适应干扰观测器为式(24),则此系统渐近稳定.以下给出证明过程:
证明 选择系统整体的李亚普诺夫函数为
|
(25) |
关于时间求微分得
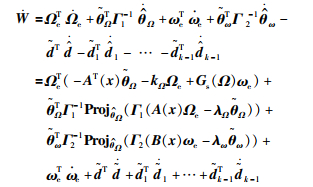
|
(26) |
由不连续投影算子性质2得
|
(27) |
由完全平方不等式得
|
(28) |
则:
|
(29) |
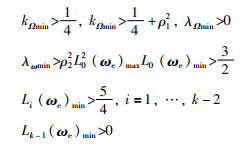
其中,kΩmin、kωmin、λΩmin、λωmin、Li(ωe)min(i=0,…,k-1)分别为矩阵KΩ、Kω、λΩ、λω、Li(ωe)中的最小元素.当鲁棒控制器参数满足式(30)条件时,
|
(30) |
由于飞机推力矢量舵面的引入,飞机共有5个操纵舵面可用,包含常规的副翼δa、平尾δe、方向舵舵面δr、侧向推力矢量舵面偏转角δy和纵向推力矢量舵面δz.本文采用加权最小二乘舵面分配算法,分配原则是:尽可能使负责相同通道的各个舵面比较一致地趋于饱和,不要个别舵面提前进入饱和.计算方法为
以各个舵面允许的最大偏角构造对角形的权重系数矩阵:

|
(31) |
将快回路仿射方程改写为

|
(32) |
其中,δ=[δa δe δr δy δz]T,记:
|
(33) |

|
(34) |


|
(35) |
对应

|
(36) |
则可以求得一组最优舵面分配:

|
(37) |
以超机动飞行动力学方程为被控对象,设计控制律为式(22),自适应律为式(18)和式(23),自适应干扰观测器为式(24),进行Matlab数字仿真.飞机的副翼δa、平尾δe、方向舵舵面δr、侧向推力矢量舵面偏转角δy和纵向推力矢量舵面δz的偏转角度限制量分别为: ±20°、±25°、±30°、±15°、±15°.按照2.3节控制系统稳定性要求,考虑到快慢回路及观测器的稳定性、准确性和快速性要求,经过多次调试,选取鲁棒控制器参数如表 1所示.
| 参数 | 取值 | 参数 | 取值 |
| KΩ | diag(4,5,5) | Kω | diag(8,10,10) |
| Γ1 | diag(1,2,3) | Γ2 | diag(1,2,3) |
| λΩ | diag(2,3,3) | λω | diag(6,7,5) |
| L0(ωe) | diag(10,20,30) | k | 2 |
选取幅值为10o/s2,周期为1 s的余弦信号作为仿真中的不确定性d=[dp dq dr]T,单位为(°)/s2.飞行仿真的进入条件为:飞行高度h=4 000 m,飞行速度v=150 m/s,发动机推力T=40 kN; 输入指令信号Ωc=[αc βc μc]T,整个仿真时间为10 s,3 s~6 s期间,迎角指令αc=90°,绕速度矢量滚转角指令μc=30°,其余时间保持为0°.侧滑角指令βc在整个仿真期间保持为0°.
为了验证本文所设计的超机动飞行鲁棒控制的抗干扰及动态和稳态性能,在外界扰动和建模误差d及不确定参数θΩ和θω的影响下,首先采用本文所设计的鲁棒控制器进行仿真,接着采用不包括自适应干扰观测器和不确定参数θΩ、θω自适应律的一般控制器进行仿真,一般控制器的θΩ、θω用对应的标准确定值代替.两种控制器的对比仿真结果如图 2~图 5所示.

|
| 图 2 慢回路指令信号与跟踪过程 Figure 2 The command signal and the trace signal of slow loop |

|
| 图 3 姿态角误差响应曲线 Figure 3 Response curves of attitude angle errors |

|
| 图 4 快回路指令信号与跟踪过程 Figure 4 The command signal and the trace signal of fast loop |

|
| 图 5 舵面偏转角度 Figure 5 The deflection angle of control surface |
图 2为采用鲁棒控制器和一般控制器的指令信号与跟踪过程对比曲线.可以看出,当存在不确定性d时,一般控制器的姿态角误差较大,控制效果并不理想.而采用了基于自适应干扰观测器和参数自适应律的鲁棒控制器明显改善了控制效果,具良好的动态性能和稳态性能. 图 3为鲁棒控制器跟踪指令信号的误差曲线,αe、βe、μe迅速稳定在一定范围内: -0.5°~0.5°,-0.4°~0.4°,-1°~1°,说明本文所设计的控制器具有较高的精度和较好的抗干扰能力. 图 4为采用鲁棒控制器的快回路虚拟指令信号与跟踪过程,快回路有较好的动态和稳态性能,控制效果较好.通过舵面分配算法得到如图 5所示的δa、δe、δr、δy、δz的动态过程.由仿真图可以看出,在超机动飞行条件下,5个舵面的偏转角都没有达到设定的限制量. 图 6为不确定性d的仿真曲线,图 7为自适应观测器和一般观测器的


|
| 图 6 d的仿真图 Figure 6 The simulation curves of d |

|
|
图 7 |

|
|
图 8 |
综合以上对仿真结果的分析可以验证,本文所设计的基于自适应干扰观测器的鲁棒控制器能够有效地补偿外界扰动及建模误差的干扰,抑制不确定气动力和气动力矩参数的影响,并使飞机按照超机动指令信号,完成超机动动作.
5 结束语本文提出了一种基于自适应观测器的超机动飞行鲁棒控制设计方法,用来解决超机动飞行过程中气动参数及外界扰动和建模误差的影响,其关键在于对干扰观测器引入自适应律来对外界干扰及建模误差进行观测和补偿,在快、慢回路中引入不连续投影自适应律对不确定气动参数进行估计,同时对整个系统进行稳定性分析,得到最终控制信号,并通过舵面分配算法得到舵面偏角.大迎角超机动的数字仿真验证了上述方法能够在较短时间内实现对超机动指令的跟踪,并使误差保持在较小范围内,具有良好的抗干扰性和动态、稳态性能.
| [1] |
朱纪洪, 张尚敏, 周池军, 等.
飞机超机动状态动力学特征及对控制系统的挑战[J]. 控制理论与应用, 2014, 31(12): 1650–1662.
Zhu J H, Zhang S M, Zhou C J, et al. Dynamic characteristics and challenges for control system of super-maneuverable aircraft[J]. Journal of Control Theory and Applications, 2014, 31(12): 1650–1662. |
| [2] | Snell S A, Enns D F, Garrard W L. Nonlinear inversion flight control for a supermaneuverable aircraft[J]. Journal of Guidance, Control, and Dynamics, 1992, 15(4): 976–984. DOI:10.2514/3.20932 |
| [3] | Brinker J, Wise K. Stability and flying quality robustness of a dynamic inversion aircraft control law[J]. Journal of Guidance, Control and Dynamics, 1996, 19(6): 1270–1278. DOI:10.2514/3.21782 |
| [4] |
朱荣刚, 姜长生, 邹庆元, 等.
新一代歼击机超机动飞行的动态逆控制[J]. 航空学报, 2003, 24(3): 242–245.
Zhu R G, Jiang C C, Zou Q Y, et al. Study on dynamic inversion control and simulation of supermaneuverable flight of the new generation flight[J]. Chinese Journal of Aeronautics, 2003, 24(3): 242–245. |
| [5] | Juliana S, Chu Q P, Mulder J A, et al. Flight control of atmospheric reentry vehicle with nonlinear dynamic inversion[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston, VA, USA: AIAA, 2004: AIAA 2004-5330. http://arc.aiaa.org/doi/abs/10.2514/6.2004-5330 |
| [6] | Da Costa R R, Chu Q P, Mulder J A. Reentry flight controller design using nonlinear dynamic inversion[J]. Journal of Spacecraft and Rockets, 2003, 40(1): 64–71. DOI:10.2514/2.3916 |
| [7] | Atesoglu O, Ozgoren M K. Automated maneuvering control of a conventional tactical aircraft enhanced with thrust vectoring controls[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Reston, VA, USA: AIAA, 2011: AIAA 2011-6636. http://arc.aiaa.org/doi/abs/10.2514/6.2011-6636 |
| [8] | Sieberling S, Chu Q P, Mulder J A. Robust flight control using incremental nonlinear dynamic inversion and angular acceleration prediction[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(6): 1732–1742. DOI:10.2514/1.49978 |
| [9] | Bosworth J T. Flight results of the NF-15B intelligent flight control system (IFCS) aircraft with adaptation to a longitudinally destabilized plant[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Reston, VA, USA: AIAA, 2008: AIAA 2008-6985. http://www.researchgate.net/publication/267782228_Flight_Results_of_the_NF-15B_Intelligent_Flight_Control_System_IFCS_Aircraft_with_Adaptation_to_a_Longitudinally_Destabilized_Plant |
| [10] |
陈谋, 邹庆元, 姜长生.
基于神经网络干扰观测器的动态逆飞行控制[J]. 控制与决策, 2008, 23(3): 283–287.
Chen M, Zou Q Y, Jiang C S. Dynamical inversion flight control based on neural network disturbance observer[J]. Control and Decision, 2008, 23(3): 283–287. |
| [11] | Bowers A H, Pahle J W, Wilson R J. An overview of the NASA F-18 high alpha research vehical[R]. Washington DC, USA: NASA, 1996. |
| [12] |
潘正伟, 薛雅丽, 章鸿翔.
滑模观测器和比例积分的超机动动态逆控制[J]. 电光与控制, 2015, 22(9): 25–30.
Pan Z W, Xue Y L, Zhang H X. Dynamic inverse control of super-maneuverable aircraft based on sliding mode observer and PI[J]. Electronics Optics and Control, 2015, 22(9): 25–30. |
| [13] | Chen J, Wang W, Mao L. Performance analysis for neuro sliding mode control with gain adjustment[C]//2nd International Conference on Computer Engineering and Applications. Piscataway, NJ, USA: IEEE, 2010: 56-59. https://www.researchgate.net/publication/232651059_Performance_Analysis_for_Neuro_Sliding_Mode_Control_with_Gain_Adjustment |
| [14] | Wang H Y, Qiao J H, Wang Q L. A hybrid adaptive wavelet neural network control and sliding mode control for electro-hydraulic servo system[C]//29th Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2010: 2328-2333. http://d.g.wanfangdata.com.cn/Conference_WFHYXW397718.aspx |
| [15] | Pukdeboon C, Zinober A, Thein M. Quasi-continuous higher-order sliding mode controllers for spacecraft-attitude-tracking maneuvers[J]. IEEE Transactions on Industrial Electronics, 2010, 57(4): 1436–1444. DOI:10.1109/TIE.2009.2030215 |
| [16] | Qian C S, Sun C Y, Huang Y Q, et al. Design of flight control system for a hypersonic gliding vehicle based on nolinear disturbance observer[C]//10th IEEE International Conference on Control and Automation. Piscataway, NJ, USA: IEEE, 2013: 1573-1577. |
| [17] | Chen M, Jiang B. Robust attitude control of near space vehicles with time-varying disturbances[J]. International Journal of Control, Automation, and Systems, 2013, 11(1): 182–187. DOI:10.1007/s12555-012-0237-4 |
| [18] | Shi Z, Zhang Y F, He C D. Adaptive robust control for maneuvering reentry vehicle basing on backstepping[C]//33rd Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2014: 2064-2068. http://ieeexplore.ieee.org/document/6896948/ |
| [19] | Yang Z L, Meng B, Sun H F. A new kind of nonlinear disturbance observer for nonlinear systems with applications to cruise control of air-breathing hypersonic vehicles[J]. International Journal of Control, 2015, 90(9): 1935–1950. |
| [20] | Sun H F, Yang Z L, Meng B. Tracking control of a class of nonlinear systems with applications to cruise control of air-breathing hypersonic vehicles[J]. International Journal of Control, 2015, 88(5): 885–896. |