



0 引言
近年来,无人机技术得到迅猛的发展,使其能够在各个领域满足相关的需求[1-2],如军事侦查、民用航拍.随着强大与先进的传感器与动力设备的出现、芯片的微型化与计算能力的日益增强、领域内优秀的无人机控制算法的提出,无人机也成为了研究的热点.另一方面,无人机的发展充满了挑战:无人机的飞行动力模型是由一组高度非线性耦合的数学常微分方程来描述的、一般户外环境中存在着大量的干扰,因而为无人机的飞行控制设计有效的控制器非常困难.
目前已提出许多来用于解决无人机控制问题的算法,如PID控制器[3-7]、反步法[8-11]、反馈线性化[12-14]、基于神经网络[15-16]、基于滑模控制[17-18]的自适应控制等.从文[4]对PID控制器在无人机控制应用中的分析可以看出,PID控制器主要的缺点在于:当进行无人机姿态角控制时,期望滚转角与期望俯仰角要有严格的限制,否则得不到很好地控制效果.而文[8-14]及文[17-18]中的控制器比较依赖于无人机模型的建立.文[15-16]具有较高的自适应性及鲁棒性,但控制器的计算量较大.
本文旨在解决无人机的姿态稳定控制与位置追踪问题.建立外层回路的PID控制器来解决位置追踪问题,建立内层回路的基于T-S模糊控制的滑模控制器来实现无人机姿态稳定问题.其优点在于:不依赖于准确的无人机模型,飞行的期望姿态角不需要限制在小范围内,具有较高的鲁棒性及自适应性.
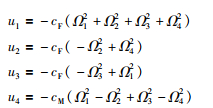
1 动力模型如图 1所示,无人机通过4个电机来驱动.升力由4个转速为[Ω1 Ω2 Ω3 Ω4]的电机提供.为了补偿空气的阻力矩,其中一个轴上的一对电机以顺时针旋转,另一个轴上的一对电机以逆时针旋转.不同电机转速所产生的控制力及力矩由下面的规则决定:

|
| 图 1 无人机机体参考系坐标 Figure 1 The reference coordinate of the UAV body |
1) 垂直升力:增加所有电机转速.
2) 滚转角力矩:减小Ω2,增加Ω4.
3) 俯仰角力矩:增加Ω1,减小Ω3.
4) 偏航角力矩:增加Ω1与Ω3,减小Ω2与Ω4.
1.1 运动学模型如图 1所示,将坐标系(x,y,z)固定在无人机上,并且将坐标系(N,E,D)设为惯性参考系.同一矢量在这两个坐标系中的转化矩阵为[13]

|
(1) |
其中,绕着固定在无人机上z、y、x轴旋转的三个角分别为偏航角、俯仰角、滚转角,其分别表示为φ、θ、ϕ; ω=[p q r]T∈R3表示在机体坐标系下的角速度,此向量的分量是时间函数; 


|
(2) |
其中,
|
(3) |
在无人机飞行过程中,假设俯仰角和滚转角都是小角度变化,可得

|
运动学模型相对比较复杂,因为其中涉及到姿态运动与位置运动.其中姿态角动力方程在机体坐标系的表达式可通过牛顿—欧拉方法得到[20]:

|
(4) |
其中,J∈R3×R3,是整个系统的转动惯量矩阵; ω×[0 0 JrΩr]T是由于电机的旋转与无人机本身的旋转引起的螺旋效应力矩; Jr∈R,表示电机的转动惯量; Ωr∈R,Ωr=-Ω1+Ω2-Ω3+Ω4; Dm表示来自外界环境的干扰力矩.大量的研究结果表明,电机转速与其提供的动力与力矩之间的关系可表述为[19]
|
(6) |
其中,cF和cM是常参数.由电机作用在无人机机体的力矩在载体坐标系中可表达为[3, 19]
|
(7) |
其中,l表示电机旋转轴到无人机中心轴之间的距离.位置运动方程在惯性参考系中的方程可由牛顿第二定律得到[3]:

|
(8) |
其中,r=[x y z]T∈R3,为无人机在惯性参考坐标系下的位置; m为整个系统的质量; g是重力加速度; FB∈R3,表示为
|
(9) |
Df表示来自外界环境的干扰力.
2 控制器设计本节将讨论控制器设计的困难之处及针对无人机姿态控制的特殊控制策略.当整个无人机系统在飞行的时候,如果无人机的某些部分(如云台)也在运动,则整个系统的转动惯量会发生变化.而且,在绝大多数情况下无人机也不可能是绝对对称的.因此整个无人机系统的状态空间模型中的部分参数不可知.而本文的双层回路控制器中的内层回路利用了基于T-S模糊控制的滑模控制器,从而能够很好地在不知道系统动力学参数情况下对无人机的姿态运动有良好的控制.
2.1 状态空间模型控制的输入可表示为

|
(10) |
其中,
|
(11) |
状态矢量可表示为

|
(12) |
状态空间模型可表示为
|
(13) |
其展开式为

|
(14) |
其中,di(i=1,2,…,6)代表来自外界环境的干扰.基于此状态空间模型,相应的双层回路控制如图 2所示.

|
| 图 2 双层闭环回路 Figure 2 The closed double circuits |
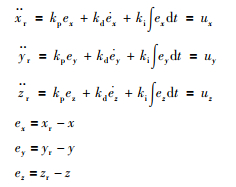
对于位置控制,采用PID控制器来产生期望滚转角与俯仰角.考虑到外界环境的干扰对位置控制的影响主要在于稳定性而不是精确性,因此在外层回路中由PID控制器产生的控制输入将不考虑外界环境干扰项.之所以能够这么做,是因为整个系统的稳定性主要由内层回路中的姿态控制器来保证,而外层回路的控制器是为了保证无人机的轨迹追踪的精确性. PID控制器产生的输入为
|
(15) |
其中,


|
(16) |
从而得到了真正的输入u1,定义公式:
|
(17) |
利用式(16)与式(17)可以得到期望滚转角ϕr及期望俯仰角θr,其表达式为
|
(18) |
定义饱和函数来保证期望滚转角ϕr及期望俯仰角θr被限定在一定范围内:
|
其中,
|
期望偏航角φr由人为给出.
2.3 姿态控制从状态空间模型的方程(14)中可以看出,除了来自外界环境的干扰之外,甚至连方程本身中也有不能得知的参数.在这种情况下,本文提出了一种基于T-S模糊模型的滑模控制器来解决姿态角运动控制的问题.由于3个姿态角控制器设计的过程类似,因此本文只展示其中一个姿态角控制器的设计过程.以状态空间模型中的滚转角为例:
|
(19) |
其中,


|
(20) |
设计滑模函数:

|
(21) |
其中,λ为一个正常数.随后得到:
|
(22) |
其中,f=c1x4x6+c2x4Ωr,c与d分别为g1与d1.
首先,设计等效控制ueq,表示为

|
(23) |
由于函数f与c的不确定性,很难获得精确的等效控制,因此采用由模糊控制产生的
|
(24) |
其中,uN为不连续控制.
由上文知ueq是未知的,利用模糊估计输入ueq取代ueq来实现反馈控制,设计基于T-S模型的模糊控制规则:
|
其中,A1l与A2l为输入s和
|
(25) |
其中,μiA1(s)与μiA2(

|
| 图 3 s的隶属度函数 Figure 3 Membership function of s |
为了能够计算出参数向量CfT的分量值,本文假设存在最优参数向量


|
(26) |
建立李亚普诺夫函数:
|
(27) |
其中,
|
(28) |
根据式(22)~式(24)、式(26)可知:
|
(29) |
因此选择最优参数向量使其满足:
|
(30) |
式(29)可变为

|
(31) |
再回到控制律uN上,定义另一个李亚普诺夫函数:
|
(32) |
同样通过微分运算可获得式(33):
|
(33) |
观察式(22)~式(24)可得

|
(34) |
不等式(35)自然成立:

|
(35) |
因此选择uN为

|
(36) |
从而保证了

|
(37) |
根据以上条件及式(31)与式(37)可得不等式:

|
(38) |
根据全局渐近稳定理论可知,选择以上控制输入是合理的.从式(36)可知,不连续控制uN直接正比于函数f、c与外界干扰d的上下界.然而这些值在大多数情况下都是比较大的,因此会产生震颤现象,所以还需要其它方法来解决这个问题.
当系统状态比较接近于s=0的邻域时,采取将等效控制作为主要的输入; 当系统状态偏离s=0的邻域时,再增加不连续控制到实际输入中,从而来减小震颤现象.为了实现这个目的,本文提出了两条模糊规则来得出最终的实际输入:
|
其中,zero和not zero是s的模糊集合,输入u的解模糊化由式(39)表达:

|
(39) |
其中,μZO(s)与μNZ(s)关于s的隶属度函数,如图 4所示.

|
| 图 4 不连续控制中的s的隶属度函数 Figure 4 Membership function of s in the discontinuous control |
为验证本文所提出的控制算法的有效性,利用仿真的结果来观察所设计的PID控制器与基于T-S模型的滑模控制器分别在位置控制与姿态角控制方面的效果.仿真实验使用的参数如表 1所示,外界干扰为
|
| m/kg | L/m | Jr/(kg·m2) | Ixx/(kg·m2) | Iyy/(kg·m2) | Izz/(kg·m2) |
| 0.5 | 0.28 | 2.9e-5 | 3.91e-3 | 3.89e-5 | 7.75e-5 |
如上文所述,期望滚转角ϕr与期望俯仰角θr是由式(18)所提供的,而期望偏航角φr由人为给出.从图 5可以看出,滚转角与俯仰角的稳态在大约2 s左右到达且超调量非常小,实际输入充分收敛到期望角度,相应的姿态角控制输入如图 6所示.

|
| 图 5 姿态角响应仿真结果 Figure 5 Simulation results for the rotational responses |

|
| 图 6 输入的仿真结果 Figure 6 Simulation results for the inputs |
图 7为位置运动的响应图,轨迹追踪的结果如图 7(d)所示.实际响应在大约1 s左右收敛到期望轨迹,并且追踪误差较小.

|
| 图 7 位置响应的仿真结果 Figure 7 Simulation results for the positional responses |
本文针对无人机轨迹追踪控制问题进行了研究,基于双层闭环回路提出了无人机控制器:内层中利用基于T-S模糊模型的滑模控制器来解决姿态控制问题,外层中利用PID控制器来解决轨迹追踪问题.该方法优点在于使得控制器的设计不需要准确的无人机模型,具有良好的自适应性及鲁棒性.仿真实验验证了本文控制器的有效性.该方法使得无人机能够在复杂的室外坏境中依然实现良好的飞行控制效果.
| [1] | Castillo P, Dzul A, Lozano R. Real-time stabilization and tracking of a four-rotor mini rotorcraft[J]. IEEE Transactions on Control Systems Technology, 2004, 12(4): 510–516. DOI:10.1109/TCST.2004.825052 |
| [2] | Carrillo L R G, López A E D, Lozano R, et al. Quad rotorcraft control:Vision-based hovering and navigation[M]. London, UK: Springer, 2013: 23-70. |
| [3] | Nagaty A, Saeedi S, Thibault C, et al. Control and navigation framework for quadrotor helicopters[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1/2/3/4): 1–12. |
| [4] | Kottenstette N, Porter J. Digital passive attitude and altitude control schemes for quadrotor aircraft[C]//IEEE International Conference on Control and Automation. Piscataway, NJ, USA: IEEE, 2009: 1761-1768. |
| [5] | Bouabdallah S, Noth A, Siegwart R. PID vs LQ control techniques applied to an indoor micro quadrotor[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2004: 2451-2456. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=1389776 |
| [6] |
张镭, 李浩.
四旋翼飞行器模糊PID姿态控制[J]. 计算机仿真, 2014, 31(8): 73–77.
Zhang L, Li H. Attitude control of four-rotor aircraft via fuzzy PID[J]. Computer Simulation, 2014, 31(8): 73–77. |
| [7] |
曹美会, 鲜斌, 张旭, 等.
基于视觉的四旋翼无人机自主定位与控制系统[J]. 信息与控制, 2015, 44(2): 190–196.
Cao H M, Xian B, Zhang X. An autonomous vision-based localization and control system for quadrotor UAV[J]. Information & Control, 2015, 44(2): 190–196. |
| [8] | Bouabdallah S, Siegwart R. Backstepping and sliding-mode techniques applied to an indoor micro quadrotor[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2006: 2247-2252. http://ieeexplore.ieee.org/document/1570447/ |
| [9] | Madani T, Benallegue A. Backstepping control for a quadrotor helicopter[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ, USA: IEEE, 2006: 3255-3260. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=4058900 |
| [10] | Chen F, Jiang R, Zhang K, et al. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5044–5056. |
| [11] | Chen F, Lei W, Zhang K, et al. A novel nonlinear resilient control for a quadrotor UAV via backstepping control and nonlinear disturbance observer[J]. Nonlinear Dynamics, 2016, 85(2): 1281–1295. DOI:10.1007/s11071-016-2760-y |
| [12] | Mokhtari A, Benallegue A. Dynamic feedback controller of Euler angles and wind parameters estimation for a quadrotor unmanned aerial vehicle[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ, USA: IEEE, 2004: 2359-2366. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=1307414 |
| [13] | Lee D, Kim H J, Sastry S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter[J]. International Journal of Control, Automation and Systems, 2009, 7(3): 419–428. DOI:10.1007/s12555-009-0311-8 |
| [14] | Khebbache H, Tadjine M. Robust fuzzy backstepping sliding mode controller for a quadrotor unmanned aerial vehicle[J]. Control Engineering & Applied Informatics, 2013, 15(2): 3–11. |
| [15] |
陈彦民, 何勇灵, 孔令博, 等.
四旋翼飞行器分散PID神经元网络控制[J]. 中国惯性技术学报, 2014, 2(2): 185–190.
Cheng Y M, He Y L, Kong L B. Decentralized PID neural network control for a quadrotor helicopter[J]. Journal of Chinese Inertial Technology, 2014, 2(2): 185–190. |
| [16] | Bouhali O, Boudjedir H. Neural network control with neuro-sliding mode observer applied to quadrotor helicopter[C]//IEEE International Symposium on Innovations in Intelligent Systems and Applications. Piscataway, NJ, USA: IEEE, 2011: 24-28. http://ieeexplore.ieee.org/document/5946063/ |
| [17] | Xiong J J, Zhang G. Discrete-time sliding mode control for a quadrotor UAV[J]. Optik -International Journal for Light and Electron Optics, 2016, 127(8): 3718–3722. DOI:10.1016/j.ijleo.2016.01.010 |
| [18] | Merheb A R, Noura H, Bateman F. Design of passive fault-tolerant controllers of a quadrotor based on sliding mode theory[J]. International Journal of Applied Mathematics & Computer Science, 2015, 25(3): 561–576. |
| [19] | Cheng Y M, He Y L, Zhou M F. Decentralized PID neural network control for a quadrotor helicopter subjected to wind disturbance[J]. Journal of Central South University, 2015, 22(1): 168–179. DOI:10.1007/s11771-015-2507-9 |
| [20] | Corona-Sánchez J J, Rodríguez-Cortés H. Trajectory tracking control for a rotary wing vehicle powered by four rotors[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1/2/3/4): 39–50. |