



0 引言
高超声速飞行器再入飞行时, 空气稀薄, 较低的动压引起气动舵面的控制效益不高, 从而无法提供足够的控制力矩来实现飞行器的稳定飞行[1], 需要启动反作用控制系统(reaction control system, RCS)实现控制力矩补偿, 并与气动舵面协同作用来完成再入姿态控制.因此, 针对气动舵面与RCS之间、气动舵面之间及RCS之间的控制分配研究是高超声速飞行器再入段姿态控制中的一个重要问题[2].
RCS作为一种只有开启和关闭两种状态的执行机构, 具有离散的工作特性, 而气动舵面是连续作用的.对于这种异类多执行机构的控制分配, 文[3-5]将RCS视为连续执行机构, 提出了采用线性规划的方法对期望力矩进行控制分配, 这种方法对RCS的近似处理使得其控制的精确性不高.文[6-8]提出混合整数线性规划的方法对RCS中的各个推力器喷管进行控制分配, 充分考虑到RCS的离散特性, 有效地解决了离散控制量在连续系统中的设计问题.文[9-11]分析了执行机构动态特性对控制分配性能的影响, 提供了几种补偿方法.然而这些方法对执行机构模型的阶数、形式有限制, 因此不能广泛应用.
对于气动舵面和RCS协同控制的系统, 常将两者视作一套连续的执行机构进行设计, 并采用脉宽调制(pulse width modulation, PWM)将连续控制量调制成RCS实际能接收的开关型控制量[12-15].这种综合设计的方法先将RCS假设为连续工作, 尽管使分析与设计得到简化, 但却并不符合RCS喷管开关的实际工作特性.本文考虑到高超声速飞行器的工作实际, 采用分步、分开设计的思路, 直接针对高超声速飞行器的离散模型, 设计基于反步法的离散控制器, 并提出一种混合规划(mixed programming, MP)的控制分配策略, 即气动舵面与RCS各自采用不同的规划控制分配算法, 将控制器产生的期望控制力矩映射到两类执行机构, 解决了具有连续工作特性和离散工作特性的两类执行机构并存于一个系统的设计困难, 降低了将两者并作一套执行机构进行综合设计时RCS喷管开关频繁开合的机械损伤, 提高了控制的精确性及工程实用性.针对气动舵面和RCS之间的操纵权限分配, 采用链式分配法, 仅当气动舵面饱和时启动RCS进行力矩补偿.气动舵面之间的力矩分配在文[6]的基础上, 考虑执行机构存在有限带宽的情况, 将执行机构的动态性信息直接加入控制分配模块, 并将有约束的二次规划问题转化为基于线性矩阵不等式(linear matrix inequality, LMI)的目标函数优化问题求解. RCS的力矩分配则采用各喷管开关的0-1整型线性规划求解.
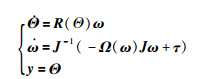
1 再入姿态模型高超声速飞行器再入段姿态动力学方程的严格反馈形式为[17]
|
(1) |
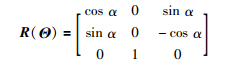
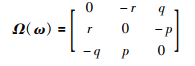
式中, J∈R3×3是转动惯量矩阵; Θ=[φ, β, α]T, φ、β、α分别表示倾斜角、侧滑角与迎角; ω=[p, q, r]T, p、q与r分别表示滚转角速率、俯仰角速率与偏航角速率; τ∈R3×1为力矩指令, 由气动舵面的控制力矩和RCS的控制力矩两个部分组成, 满足τ=Gδ+Γurcs, G∈R3×8为气动舵面的控制分配矩阵, δ∈R8×1为气动舵面的偏转角向量, urcs∈R10×1表示RCS各喷管的状态向量(只取0或1, 分别表示关闭和开启), Γ∈R3×10为RCS的力矩矩阵, Γij表示第j个RCS的喷管在第i个轴上提供的力矩值; 矩阵R(Θ)和Ω(ω)分别为
|
(2) |
|
(3) |
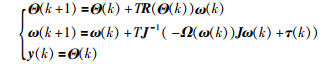
设采样时间为T, 通过欧拉近似法[18]将式(1)表示的连续模型转化为离散模型, 表示为
|
(4) |
针对式(4)描述的高超声速飞行器离散模型, 以τ(k)作为输入量, 基于反步法设计离散控制器[20], 使输出的姿态角向量Θ(k)能够跟踪参考信号Θd(k).定义x1(k)=Θ(k), x2(k)=ω(k), 模型简化为
|
(5) |
式中, g1(x1(k))=R(Θ(k)), g3=J-1, g2(x2(k))=-J-1·Ω(ω(k))Jω(k).
步骤1 定义误差z1(k)=x1(k)-x1d(k), z2(k)=x2(k)-x2d(k), 其中x1d(k)=Θd(k)为给定的姿态角指令(假设其提前两步的期望值可得), 根据式(5)有:

|
(6) |
采用反步法, 选取x2d(k)为

|
(7) |
步骤2 由定义可得:

|
(8) |
选取实际控制量为

|
(9) |
此处得到的控制量τ(k)即为期望的总控制力矩τdes(k).
分析稳定性, 选取李亚普诺夫函数:

|
(10) |
则:

|
(11) |
根据不等式2aTb≤εaTa+(1/ε)bTb(ε为适当的常数, a与b均为维数一致的列向量)及‖g1(x1(k))‖=1分别计算ΔV1(k)与ΔV2(k):

|
(12) |

|
(13) |
因此, 结合式(11)、式(12)和式(13)可得:
|
(14) |
只要选择适当的ci(i=1, 2)和ε, 使:
|
(15) |
就可得ΔV(k)<0, 即姿态控制系统是渐近稳定的.
3 混合规划控制分配策略针对控制器得到的期望力矩τdes(k), 本文提出一种混合规划控制分配策略, 把τdes(k)映射到各个执行机构中.以最大限度地使用气动舵面为前提, 气动舵面与RCS之间的力矩分配采用链式递增分配方式[8].由于气动舵面与RCS在工作特性上大不相同, 两者根据各自的特性对各自的总力矩进行再分配.控制分配结构图如图 1所示.

|
| 图 1 控制分配框图 Figure 1 Block diagram of the control allocation |
高超声速飞行器的控制分配问题描述为

|
(16) |
式中, τdes(k)为期望的总控制力矩, τδdes(k)与τrcs(k)分别为气动舵面与RCS的期望控制力矩, urcs(k)为RCS的喷管状态, δcmd(k)为气动舵面的指令偏转.控制分配问题就是针对期望的控制力矩τdes(k), 寻求满足一定优化性能指标和约束条件的控制量δcmd(k)和urcs(k).
3.1 气动舵面的控制分配 3.1.1 执行机构动力学模型若执行机构的动态特性是线性时不变的且各执行机构之间完全解耦, 则8个气动舵执行机构的离散状态空间表达式为
|
(17) |
其中, xact(k)∈RN为状态量; δcmd(k)∈R8为输入量, 表示指令舵面偏转量; δact(k)∈R8为输出量, 表示实际舵面偏转量; A∈RN×N, B∈RN×8, C∈R8×N, 为离散执行机构动态系统的参数矩阵且均为分块对角矩阵; 
|
(18) |
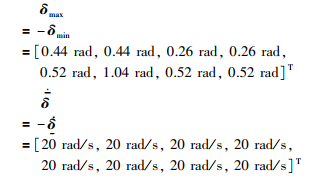
其中, δmin∈R8, δmax∈R8, 分别为气动舵面最小和最大偏转位置限制; 

本节将执行机构动态性信息加入到二次规划内, 再将其转化为基于线性矩阵不等式的优化问题进行求解.气动舵面的控制分配流程如图 2所示.

|
| 图 2 气动舵面控制分配框图 Figure 2 Block diagram of the control allocation between the aero-surfaces |
由于执行机构动态性引起一个采样周期的延迟及偏转能量的削减, 第k个采样周期的期望力矩与第k个采样周期实际产生的力矩不相等.本文期望它与第k+1个采样周期的实际力矩相等[11], 根据式(17), 有:

|
(19) |
因此, 考虑二次规划问题:
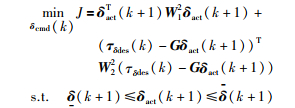
|
(20) |
式(19)与式(20)中, W1=diag(w1, 1, w1, 2, …, w1, 8)为正定对称矩阵且w1, p(p=1, 2, …, 8)表示第p个气动舵执行机构的权重系数, W2=diag(w2, 1, w2, 2, w2, 3)也为正定对称矩阵且w2, i为第i轴方向上力矩误差的权重系数(i=1, 2, 3, 即滚转、俯仰、偏航坐标轴).该目标函数以实际控制力矩与期望控制力矩误差最小为第1性能指标, 因此权重矩阵W1的选取应远大于W2.
为求解目标函数J的最小值, 引入松弛变量γ>0, 令γ-J>0, 从而将求解J的最小值转化为求γ的最小值, 由式(20)有:

|
(21) |
根据线性矩阵不等式的Schur补性质, 可将式(21)这种非线性矩阵不等式转化为线性矩阵不等式:
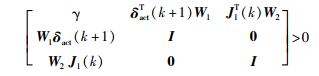
|
(22) |
式中, J1(k)=τδdes(k)-Gδact(k+1).同时, 将式(20)中的气动舵的饱和约束改写为

|
(23) |
其中, ei表示沿着δact, i方向上的单位向量, δact, i表示第i个实际舵面偏转量.
因此, 基于二次规划的控制分配问题转化为具有线性矩阵不等式约束的目标函数最小化问题:
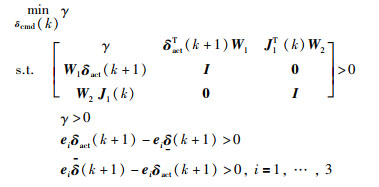
|
(24) |
考虑到RCS的喷管开关只有开启或关闭两种状态, 即只能取1或0, 因此采用0-1整型线性规划的方式把剩余的控制力矩τrcs(k)分配到10个RCS的喷管上, 并保证其力矩误差最小, 开启的喷管数目最少, 则优化函数定义为
|
(25) |
式中, urcs, j(k)为第j个RCS的喷管的开关状态; τrcs, i(k)为第i轴上需要RCS提供的控制力矩; ωaxis, i为第i轴上力矩误差的权重系数; ωj为第j个RCS喷管的权重系数, 表示各喷管的优先级且参数ωj的选取远小于ωaxis, i.同时, 
为了减少RCS的喷管开启数目, 降低燃料的消耗, 要保证RCS提供的控制力矩不能超过所需要的控制力矩τrcs(k), 即RCS要满足约束:
|
(26) |
定义一个松弛向量us(k)∈R3×1, 且us(k) 
|
(27) |
高超声速飞行器初始飞行条件为: [φ, β, α]T=[0.2 rad, 0.3 rad, 0.1 rad]T, [p, q, r]T=[0 rad/s, 0 rad/s, 0 rad/s]T, 姿态角参考输入为Θd=[0.1 rad, 0 rad, 0.2 rad]T.假设飞行器的飞行高度与飞行环境固定不变, 各舵机执行机构为二阶模型
|
基于反步法的离散控制器参数设计为c1=0.9, c2=0.85.转动惯量矩阵J(转动惯量单位为kg·m2)为
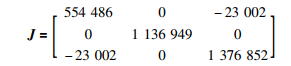
|
RCS的力矩矩阵为(力矩单位为N·m)
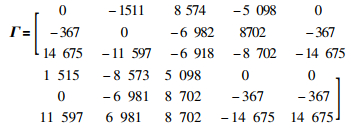
|
采样时间为T=0.01 s, 气动舵面控制分配的权值矩阵分别为W1=diag(1, 1, …, 1)和W2=diag(100, 100, 100), RCS控制分配的权重系数取为ω1=ω2=…=ω10=0.01.
本节首先对文中提出的混合规划控制分配策略进行了仿真验证, 并比较了有无RCS作用时的姿态角跟踪情况, 见图 3~图 5; 其次, 对文[12]中将RCS与气动舵面视为一套连续执行机构进行综合设计, 并采用线性规划(linear programming, LP)与脉宽调制(pulse width modulation, PWM)进行控制分配的算法进行仿真, 与本文的混合规划控制分配算法进行分析比较, 见图 6~图 7.

|
| 图 3 姿态角跟踪曲线 Figure 3 Tracking curves of the attitude angles |

|
| 图 4 气动舵面的偏转角度 Figure 4 Deflection angles of the aero-surfaces |

|
| 图 5 RCS的开关状态 Figure 5 Switch states of the RCS |

|
| 图 6 RCS提供的力矩 Figure 6 Torque commands from the RCS |

图 3显示了3种情况下的姿态角跟踪曲线.从图 3可以得出: 1) 图 3验证了本文针对离散模型提出的混合规划控制分配策略的有效性.当姿态角参考指令给出后, 经过控制律调节和控制分配算法解算, 系统能将3轴控制力矩优化分配至对应的异类执行机构, 并通过各执行机构的动作最终实现姿态角指令的跟踪, 与文[12]的方法比较, 控制效果更好, 具有快速性好、稳定性高的特点. 2)通过比较混合规划控制分配算法在有无RCS作用时的姿态角跟踪曲线可知, 启动RCS时姿态角跟踪上参考指令的时间比不启动RCS时更快, 可见当气动舵面控制效率较低时, 启动RCS作为辅助执行机构能够有效提高系统的跟踪性能和稳定性.
飞行器再入段飞行时, 气动舵面在饱和约束下提供的力矩不足, 需开启RCS进行补偿, 采用混合规划控制分配策略的各执行机构的使用情况如图 4~图 5所示. 图 4显示了8个气动舵面在饱和约束下的偏转响应曲线, 图 5显示了10个RCS喷管(Jet1~Jet10)的开关状态.比较图 4与图 5分析混合规划的分配机制:在控制初期, 系统所需的控制力矩较大, 当气动舵面处于饱和状态时, RCS处于开启状态; 当姿态角逐渐跟踪上参考指令时, 所需的控制力矩逐渐减小, 此时气动舵面单独作用即可提供足够的控制力矩, RCS处于关闭状态.从图 4、图 5的仿真曲线可以看出, 本文提出的混合规划控制分配策略最大限度地使用了气动舵面, 降低了RCS的能量损耗, 通过优化分配能够实现气动舵面与RCS之间的复合工作且与合理的姿态控制律结合能够实现姿态角的稳定跟踪.
图 6对比了文[12]的综合设计方法与本文混合规划方法中RCS提供的控制力矩曲线.从图 3中已看出, 综合设计能够实现良好的姿态角跟踪效果, 但从图 6看出, 本文混合规划控制分配算法得到的力矩曲线变化平缓, 显示出控制力矩能够在一段时间内保持, 而综合设计方法得到的曲线抖动频繁, 这表示RCS喷管开关在短时间内频繁地开启和关闭, 这大大增加了执行机构的机械磨损, 容易引起执行机构故障, 这在工程实际应用中是一个不容忽视的隐患. 图 7为文[12]中RCS的开关状态, 与图 5对比, 同样验证了综合设计方法中RCS状态变化快的缺点.
5 结论本文考虑高超声速飞行器的工作实际, 就气动舵面与RCS控制分配问题展开了研究, 为高超声速飞行器的控制分配提供了一种新的思路.本文设计了基于反步法的离散控制器, 并提出了一种混合规划的控制分配策略, 将控制器产生的期望控制力矩指令以最优的方式分配至具有连续工作特性的气动舵面和具有离散工作特性的RCS, 优化了不同类型的操纵机构组合使用, 在兼顾控制精确性的同时也满足了工程实用性.由于最大限度地使用气动舵面容易引发飞行器的执行机构故障, 因此下一步工作将在气动舵面与RCS两者的操纵权限分配问题上做进一步的研究, 力图使两者之间的力矩分配更加合理, 实现智能的在线分配.
| [1] |
梁栋, 宋建梅, 蔡高华.
高速飞行器直接力/气动力复合控制技术综述[J]. 航空兵器, 2013(4): 15–19.
Liang D, Song J M, Cai G H. Survey of compound control methods of reaction thrust and aerodynamic fin of flight vehicle[J]. Aero Weaponry, 2013(4): 15–19. |
| [2] |
包为民.
航天飞行器控制技术研究现状与发展趋势[J]. 自动化学报, 2014, 39(6): 697–702.
Bao W M. Present situation and development tendency of aerospace control techniques[J]. Acta Automatica Sinica, 2014, 39(6): 697–702. |
| [3] | Shertzer R, Zimpfer D, Brown P. Control allocation for the next generation of entry vehicles[C]//AIAA Guidance, Navigation and Control Conference and Exhibit. Keystone, Co, USA: AIAA, 2002. http://onlinelibrary.wiley.com/doi/10.1111/j.1477-8947.1984.tb00482.x/citedby |
| [4] |
周宇, 黄一敏, 孙春贞.
基于脉宽调制的反作用控制系统技术[J]. 信息与电子工程, 2012, 10(4): 446–450.
Zhou Y, Huang Y M, Sun C Z. Control technology based on pulse width modulation of RCS[J]. Information & Electronic Engineering, 2012, 10(4): 446–450. |
| [5] |
钱承山, 吴庆宪, 姜长生, 等.
基于反作用发动机推力的空天飞行器再入姿态飞行控制[J]. 航空动力学报, 2008, 23(8): 1546–1552.
Qian C S, Wu Q X, Jiang C S, et al. Flight control for an aerospace vehicle's reentry attitude based on thrust of reaction jets[J]. Journal of Aerospace Power, 2008, 23(8): 1546–1552. |
| [6] | Doman D B, Gamble B J, Ngo A D. Quantized control allocation of reaction control jets and aerodynamic control surfaces[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(1): 13–24. DOI:10.2514/1.37312 |
| [7] | Doman D B, Gamble B J, Ngo A D. Control allocation of reaction control jets and aerodynamic surfaces for entry vehicles[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Keystone, Co, CA, USA: AIAA, 2007: 994-997. http://www.researchgate.net/publication/268554760_Control_Allocation_of_Reaction_Control_Jets_and_Aerodynamic_Surfaces_for_Entry_Vehicles |
| [8] |
何晶晶, 齐瑞云, 姜斌.
基于气动舵面和RCS融合控制的高超声速飞行器再入姿态容错控制[J]. 计算机辅助工程, 2015, 24(3): 39–45.
He J J, Qi R Y, Jiang B, et al. Fault-tolerant control on reentry attitude of hypersonic flight vehicle based on aerodynamic surfaces and RCS[J]. Computer Aided Engineering, 2015, 24(3): 39–45. |
| [9] | Oppenheimer M W, Doman D B. Methods for compensating for control allocator and actuator interactions[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(5): 922–927. DOI:10.2514/1.7004 |
| [10] | Oppenheimer M W, Doman D B. A method for compensation of interactions between second-order actuators and control allocators[C]//2005 IEEE Aerospace Conference. Piscataway, NJ, USA: IEEE, 2005: 1-8. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=1559571 |
| [11] | Härkegård O. Dynamic control allocation using constrained quadratic programming[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(6): 1028–1034. DOI:10.2514/1.11607 |
| [12] |
胥彪, 周荻.
基于反步法及控制分配的导弹直接侧向力/气动力复合控制[J]. 系统工程与电子技术, 2014, 36(3): 527–531.
Xu B, Zhou D. Back-stepping and control allocation for dual aero/propulsive missile control[J]. Systems Engineering & Electronics, 2014, 36(3): 527–531. |
| [13] |
周锐, 杨晓东, 王军.
具有异构多操纵机构的飞行器复合控制技术[J]. 宇航学报, 2008, 29(4): 1297–1301.
Zhou R, Yang X D, Wang J. Blended control of flight vehicles with different kinds of control effectors[J]. Journal of Astronautics, 2008, 29(4): 1297–1301. |
| [14] | Ridgely D B, Lee Y, Fanciullo T. Dual aero/propulsive missile control-optimal control and control allocation[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit. Keystone, Co, CA, USA: AIAA, 2006: 2006-6570. http://arc.aiaa.org/doi/abs/10.2514/6.2006-6570 |
| [15] | Chai D, Fang Y, Wu Y, et al. Aerodynamic force and lateral thrust blended control for hypersonic missile using fuzzy control algorithm[C]//Control Conference. Piscataway, NJ, USA: IEEE, 2015. http://www.researchgate.net/publication/308813662_Aerodynamic_force_and_lateral_thrust_blended_control_for_hypersonic_missile_using_fuzzy_control_algorithm |
| [16] |
黄頔, 郝宇清, 段志生.
可重复使用天地往返飞行器中的多输入控制问题[J]. 控制理论与应用, 2014, 31(7): 878–889.
Huang D, Hao Y Q, Duan Z S. Multiple-input problem in control of reusable launch vehicle[J]. Control Theory & Applications, 2014, 31(7): 878–889. |
| [17] | Shtessel Y, McDuffie J, Jackson M. Sliding mode control of the X-33 vehicle in launch and reentry modes[J]. American Institute of Aeronautics and Astronautics, 1998: 1352–1362. |
| [18] | Mareels I M, Penfold H B, Evans R J. Controlling nonlinear time-varying systems via Euler approximations[J]. Automatica, 1992, 28(4): 681–696. DOI:10.1016/0005-1098(92)90030-J |
| [19] | Arun K W C, Sen S, Ray G, et al. Dynamic control allocation for tracking time-varying control demand[J]. Journal of Guidance, Control and Dynamics, 2008, 31(4): 1150–1157. DOI:10.2514/1.34085 |
| [20] |
田聪玲. 基于反步法的四旋翼飞行器非线性控制[D]. 哈尔滨: 哈尔滨工业大学, 2014. Tian C L. Nonlinear control of quadrotor based on back-stepping[D]. Harbin: Harbin Institute of Technology, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014081944.htm |