



0 引言
容错控制[1-4]的目的在于当系统发生故障后, 能够补偿故障产生的影响, 以维护系统的稳定性并尽可能恢复系统故障前的性能, 使系统运行稳定可靠.容错控制为提高系统的可靠性和安全性开辟了一条新的途径.
系统的可重构性也称为故障的可恢复性, 它一般包含2个方面: 1)是否存在一个控制律使得发生故障后的系统仍然稳定且有良好的响应;2)该控制律是否可行, 即该控制律是否满足一定的输入能量限制条件.可重构性和容错控制的关系就好比“可控性”和“控制器设计”, 因此对系统进行容错控制之前, 对其进行可重构性分析显得尤为重要.文[5]利用奇异值矩阵的最小特征值分析了线性时不变系统的可重构性.文[6]考虑了在一定能量限制条件下, 线性时变系统在执行器故障时的可重构性.文[7]基于分段仿射系统方法分析了非线性系统的可重构性.文[8]通过引入切换系统格莱姆矩阵的概念来分析切换系统的可重构性.更多有关系统可重构性的研究概况可参考文[9].
互联系统是指一类由多个子系统通过一定的耦合方式组成的复杂系统.随着控制系统规模的日益增大, 越来越多的复杂系统具有多个子系统互联的特性, 如大规模的电网传输系统、多体飞行器系统及城市地下物联网系统等[10].各个子系统都有着不同的动态特性和控制要求, 因此无法运用单一的系统模型建模.运用互联系统对其进行建模是一种行之有效的方法[11].对于这一类系统, 故障的发生可能更为致命, 造成的损失也更为巨大.经过数十年的发展, 互联系统的分析和设计取得了令人鼓舞的进展[12-16].然而, 绝大多数研究关注的重点都在于定性的讨论分析互联系统稳定性和镇定性, 目前尚未有关于互联系统可重构性的成果报道.
互联系统中子系统之间的耦合导致其可重构性分析更加复杂, 而现有的可重构性分析工具大都是针对单个子系统的.严格来说, 由于组成系统的各个部件在不同程度上存在非线性的性质, 因此实际的自动控制系统都是非线性系统.非线性系统不能采用叠加原理来进行分析, 这就决定了其在研究上的复杂性和多样性.由于缺乏能统一处理的有效数学工具, 非线性控制系统至今仍未像线性控制系统那样建立起一套完善的理论体系和设计方法.在许多工程应用中, 由于难以求解出系统的精确输出过程且考虑到绝大多数非线性系统的正常状态都是处于稳定的平衡态之中, 可以利用数学中泰勒级数的思想, 对其进行小扰动线性化.这样非线性系统在平衡点及其附近的动态特征就能用一个线性系统来描述, 同时也可以采用较为成熟的线性系统理论对其进行分析和设计.本文就一类线性互联系统, 给出了集中式和分布式两种控制结构下的可重构性评价方案.其中, 在集中式控制结构下, 将互联系统视为一个整体进行控制律设计, 进而通过分析其输入能耗评价系统的可重构性;在分布式控制结构下, 设计了一种分布式控制律对系统耦合进行补偿, 并通过计算其输入能耗分析系统的可重构性.本文的主要贡献在于: 1)对线性互联系统进行了集中式控制律和分布式控制律的设计;2)从能量的角度出发, 定量地分析了所设计的控制律是否满足系统的能耗限制;3)将理论结果应用于元飞机模型上, 并通过仿真结果验证所提出的可重构性评价方案的有效性.
1 预备知识在本节中会给出本文用到的一些符号定义及相关的基础知识.
1.1 符号定义对于向量v∈Rn, 记‖v‖:= 

首先考虑一个独立的线性系统, 其状态方程为
|
(1) |
其中, x∈Rn, 是系统状态向量;u∈Rq, 是系统输入向量;A∈Rn×n, B∈Rn×q, 分别是系统矩阵和控制增益矩阵.
引理1[17] 对于线性系统(1), 如果存在t1>t0, 使得可控性格莱姆矩阵
考虑一个由m个子系统相互连接构成的互联系统, 其子系统间的耦合特性可以由有向图G=(M, E)来表征.其中, M:={1, 2, ..., m}表示所有子系统所构成的集合;E是所有邻边组成的集合;元素(j, i)∈E表示从子系统j到子系统i的通路, 这意味着子系统i和子系统j是相耦合的, 子系统i的动态方程为

|
(2) |
其中, Ai∈Rni×ni, Bi∈Rni×qi分别是子系统i的系统矩阵和控制增益矩阵, i∈M;Hij∈Rni×nj是子系统i和子系统j的耦合矩阵, j∈Ni表示子系统j是子系统i的邻居且当j∉Ni时, Hij=0.整个互联系统的动态方程可以表示为
|
(3) |
其中,
|
此时可以将互联系统(3)视为单个线性系统, 进而可以利用引理1判别其可控性.
1.3 独立系统的可重构性当系统发生故障后, 有很多种容错控制设计方法, 但由于受到实际条件的约束或环境的限制, 有些控制律是不可实现的.本文考虑的可重构性包括2个方面: 1)存在一个控制律使得故障后的系统可以达到给定的容错控制目标, 即系统可以由初始状态x(t0)=x0在终端时刻tf>t0转移到x(tf)=0;2)该控制器是可行的, 即满足系统的输入能量限制条件.
当线性系统(1)发生故障后, 其动态方程改写为

|
(4) |
其中, θ∈Rc是由故障所引入的向量参数, 故障的存在会使系统矩阵发生改变.记Ω为系统的故障集合, 即θ∈Ω.
定义1[7] 考虑系统(4), 若对于给定的初始状态x(t0)=x0, 存在一个可行的输入u使系统状态在tf>t0时刻转移到x(tf)=0, 则称系统(4)对于故障θ(θ∈Ω)是可重构的.
基于文[17]的分析, 设计控制律:

|
(5) |
其中, 

|
(6) |
记ζ≥0是系统容许的输入能量限制.如果ρ(θ):=λmax(W-1)‖x0‖2足够小使得Q(x0, u, θ)≤ζ恒成立, 那么就能满足系统的输入能量限制条件.
引理2[8] 对于系统(4), 其初始状态为x0, 容许的输入能量限制为ζ, 如果满足:

|
(7) |
则称系统(4)对于故障θ(θ∈Ω)是可重构的.
引理2给出了系统发生故障后是否具备可重构性的一个定量判别标准.
2 互联系统的可重构性分析互联系统与独立系统相比较而言, 由于互联项的引入导致问题的分析更加复杂.本文将分别从集中式和分布式控制结构出发, 构建互联系统的可重构性评价方案.由于本文研究的侧重点在于可重构性分析, 所以假设已经得到了故障之后的系统参数.故障检测与诊断的方法参见文[18-20].
考虑由m个子系统组成的互联系统, 其故障后模型辨识为

|
(8) |
其中, Ai(θi)、Bi(θi)、Hij(θi)是发生故障后的系统相应维度的系数矩阵.此时受故障的影响, 单个子系统l(l∈M)的可控性可能遭到破坏, 变得不再可控.但若综合考虑其邻居系统的耦合, 将子系统l和其一些邻居系统组成一个群落(group), 则群落整体可能是可控的.当不考虑群落之间的耦合时, 单个群落的动态方程为

|
(9) |
其中, zl:=[xlT xl1T … xTlml]T, vl:=[ulT(t) ul1T(t) … uTlml(t)]T (l1, …, lml∈Nl), ml表示该群落中子系统l的邻居子系统的个数,
|
其中, Hli, lj(i, j∈{1, …, ml})表示群落l中子系统li和子系统lj的耦合矩阵.此时可将群落看成一个新的系统, 如图 1所示.

|
| 图 1 群落划分示意图 Figure 1 The schematic diagram of the grouplization |
假设1 对于故障后的互联系统(8)而言, 针对故障所导致的单个子系统l不可控的情形, 总能找到一个由该系统和其邻居系统组成的可控群落zl且每个子系统只属于一个群落.
当系统不满足假设1时, 即找不到一个可控的群落, 则无法设计控制器使得群落由初始状态转移到零状态, 此时系统是不可重构的.
原系统经划分为p个群落系统后, 互联系统(8)的动态特性可以重新表示为

|
(10) |
其中, Glk∈Rnl×nk是群落l和群落k之间的耦合矩阵, 表示群落之间的耦合特性.从而可以从群落的角度出发, 评价系统是否是可重构的.
定义2 对于系统(10), 若对于给定的初始状态zl(t0)=zl0, 存在一个可行的输入vl使系统状态在tf>t0时刻转移到zl(tf)=0, 则称系统(10)对于故障θ(θ∈Ω)是可重构的.
接下来, 分别在集中式和分布式两种控制结构下, 构建群落化后的互联系统(10)的可重构性评价方案.
2.1 集中式互联系统在如图 2所示的集中式控制结构下, 整个系统存在一个集中的监测器, 每个子系统都可以获得所有子系统的状态信息和故障信息.因此, 在集中式控制结构下, 可以将互联系统看成一个整体设计控制器.

|
| 图 2 集中式控制结构 Figure 2 Centralized control structure |
对于互联系统(10), 在集中式控制结构下, 可以将其动态方程改写为

|
(11) |
其中,
|
根据之前分析, 当系统(11)是可控时, 存在tf>t0时刻, 使其可控性格莱姆矩阵W(t0, tf, θ):= 

|
(12) |
记Qc(V, Z0, θ):=‖V‖t2为系统在集中式控制结构下全局的输入能耗, ζc是集中式控制结构下系统容许的输入能量限制, ρc(θ):=λmax(W-1)‖Z0‖2, 则可得到下述定理.
定理1 对于系统(10), 若对于给定的初始状态Z0, 在集中式控制结构下的输入能量满足:

|
(13) |
则称互联系统(10)对于故障θ(θ∈Ω)是可重构的.
证明 当选取集中式控制律(12)时, 互联系统(10)可由给定的初始状态Z0转移到Z(tf)=0:
|
(14) |
集中式控制结构下全局的输入能耗:
|
所以条件(13)可以保证系统满足输入能量限制条件.
将能使故障系统从任意初始状态转移到零状态的集中式控制律集合记为Ψc, 显然控制律(12)是集合中的元素.因此控制律(12)的能耗不少于最优的集中式控制律的能耗, 即至少存在一个集中式控制律满足系统的输入能量要求.由此可得, 互联系统(10)对于故障θ(θ∈Ω)是可重构的.
2.2 分布式在如图 3所示的分布式控制结构下, 每个子系统都有自己的监测器, 但是只与跟它耦合的子系统进行状态信息和故障信息的交互.因此, 在分布式控制结构下, 可以充分利用与子系统i耦合的所有子系统j的状态信息和故障信息, 设计控制器ui(xi, xj, θi, θj), j∈Ni.

|
| 图 3 分布式控制结构 Figure 3 Distributed control structure |
假设2[22] 互联系统(10)满足条件:

|
(16) |
假设2是系统控制增益矩阵和耦合项矩阵相匹配的条件, 即存在一个矩阵Flk*∈Rnl×nl, 使得(I-Fl(θl)Flk*)·Glk(θl)=0, 其中I∈Rnl×nl是单位矩阵.
互联系统(10)对于一类故障θ(θ∈Ω), 在分布式控制结构下, 对每个群落设计控制器:

|
(17) |
其中, χl:=-FlTe-ElT(t-t0)Wl-1zl0, flk:=-Flk*Glkzk, Wl是群落l的可控性格莱姆矩阵.
定义局部能耗矩阵Λ∈Rp×p和L2增益矩阵Γ:

|
(18) |
|
(19) |
其中, γlk(l, k∈{1, …, p}且l≠k)表示的是输入输出系统:
|
(20) |
的L2增益, 可以等效为系统传递矩阵Flk*Glk(sI-Ek)-1Fk的H∞增益[21].
记
定理2 对于系统(10), 若对于给定的初始状态Z0, 在分布式控制结构下的输入能量满足:
|
(21) |
则称互联系统(10)对于故障θ(θ∈Ω)是可重构的.
证明 当选取分布式控制律(17)时, 互联系统(10)中每个群落的动态变为
|
(22) |
互联系统(10)在分布式解耦控制律(17)的作用下, 系统动态可由给定的初始状态zl0转移到zl(tf)=0:
|
(23) |
下面分析该控制律的输入能耗.与式(15)的分析类似, 可以得到:

|
(24) |
而flk即为系统(20)的输出yk, 由H∞[21]的定义可得:
|
(25) |
由式(18)、式(19)及三角不等式, 可以得到:
|
(26) |
其中, Γl为式(19)所定义的矩阵Γ的第l行, l=1, …, p.结合式(26)和
|
(27) |
所以条件(21)可以保证系统满足输入能量限制.
将能使故障系统从任意初始状态转移到零状态的分布式控制律集合记为ΨDs, 显然控制律(17)是集合中的元素, 因此控制律(17)的能耗不少于最优的分布式控制律的能耗, 即至少存在一个分布式控制律满足系统的输入能量要求.由此可得, 互联系统(10)对于故障θ(θ∈Ω)是可重构的.
3 元飞机应用 3.1 模型建立近些年来, 无人飞行器不管是在军事领域还是民用领域都有着广泛的应用, 如军事侦察、灾区勘查搜救等.元飞机是由多个独立的飞行器通过一定的物理连接机制耦合起来的综合飞行器, 这些互联的子飞行器间可以实现传递燃料、分担负载或信息交互等功能[22].如在执行勘察搜救任务中, 勘查机可以利用所携带的雷达设备对某一区域实现勘察, 同时它可以和一个携带作战武器的飞行器互联以实现对敌机的防卫功能, 也可以进一步和其它的飞行器互联以实现更多的功能, 如燃料补给机.这些飞行器通常通过翼尖—翼尖(wing-tip-to-wing-tip)或者首—尾(tip-to-tail)结构耦合、分离, 如图 4所示.这些互联结构给多功能战略机的设计带来了极大的优势.本文主要考察翼尖—翼尖结构下元飞机的纵特性.

|
| 图 4 元飞机耦合布局 Figure 4 Meta aircraft coupling configurations |
通过翼尖—翼尖结构连接的元飞机, 一种常见的技术是飞行器机翼和机翼之间通过一组磁铁相耦合, 如图 5所示.当两个飞行器翼间距离足够小的时候, 磁铁间的作用力和力矩会稳定于一个常值.在连接过程中, 将跟随者飞行器的机翼外表面连接处视为尖点(vertices), 领航者机翼视为棱柱, 并用软接触模型分析此连接过程[24].此连接过程是通过一种被称为面元的无质量刚性平面完成的.可以用一个更加直观的由法向和切向两个方向的弹簧和阻尼元件组成的弹簧阻尼系统来代替面元与机翼之间的接触模型[24]:
|

|
| 图 5 元飞机可重构性评估 Figure 5 Reconfigurability evaluation of meta aircraft |
其中, Δxwij、Δywij、Δzwij是第i个和第j个飞行器翼尖之间沿3个坐标轴的距离, Δϕij、Δϑij和Δψij表示的是第i个和第j个飞行器之间的滚转角、俯仰角和偏航角差值.因此元飞机在翼尖—翼尖耦合结构下的动态特性在平衡点小扰动线性化后可以表示为
|

|
其中, ΔVi=ΔVi/Vi0, 表示第i个飞行器速度的百分比增量;Ti、Di和Yi表示施加在第i个飞行器上总的推力、阻力和升力;αi、μi和ϑi分别表示第i个飞行器的攻角、航迹角及俯仰角;δei、δTi表示第i个飞行器的升降舵偏转角和发动机推力;Mi、Izi表示第i个飞行器俯仰力矩和质量惯性矩阵;X表示元飞机在速度方向前进的距离.
3.2 仿真结果在元飞机纵向特性的仿真验证中, 参考文[25]中的固定翼小型无人驾驶飞行器的参数.单个飞行器的重量为5.6 kg, 转动惯量为Iz=0.847 0 kg·m2.连接节点由弹性元件保证弹性性能, 柔性转动元件完成相对转动.线性弹簧的胡克系数为1 000 N/m, 阻尼器的参数设定为40 N·s/m.纵向安定系数为2 580 N·m/rad, 俯仰阻尼系数为10 N·m·s/rad.本文研究了由两架飞行器通过翼尖—翼尖结构组成的元飞机上发生执行器部分失效故障的问题, 为方便说明, 假设只有一台飞行器出现了故障.进一步的, 元飞机系统的动态特性可以表示为
|
其中,
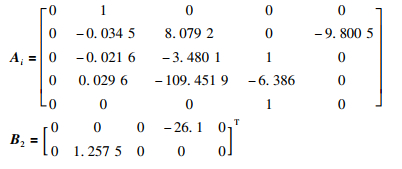
|
|
第1个飞行器故障后的控制增益矩阵辨识为

|
其中, θ1, θ2∈[0, 1].当θ1=θ2=0时, 执行器完全失效;当θ1=θ2=1时, 执行器为无故障状态.
不失一般性, 将元飞机在t0时刻的初始状态的向量范数选取为1.根据式(12)设计集中式控制器:

|
其中,

|
根据式(17)设计分布式解耦控制器:

|
然后根据式(15)和式(27)分别计算出在集中式和分布式控制结构下全局的输入能耗, 仿真结果如图 5所示.
图 5(a)描绘的是元飞机系统在集中式控制下的可重构性评价图, 其中与θ1-θ2相平行的平面就是系统容许的输入能量限制.当执行器有效因子θ1、θ2接近于1时, 输入能量满足系统输入能量限制, 系统是可重构的.但是随着执行器失效程度的增加, 如当θ1=0.2, θ2=0.4时, 虽然仍存在控制器使得系统状态回到原点, 但是其输入能量已经超出了系统的限制, 此时元飞机系统不可重构. 图 5(b)是元飞机系统在分布式控制下的可重构性评价图, 与集中式结构类似分析, 可以看出当执行器有效因子接近于1时, 系统所需输入能量相对较小, 而当执行器失效较严重时, 即θi接近0时, 系统所需输入能量相对较大, 这和实际情况是相吻合的.
4 总结和展望本文就一类线性互联系统, 分别从集中式和分布式控制结构予以考虑, 建立了不同控制结构下的可重构性评价方案, 并通过元飞机系统的实际应用验证了所提出的理论.下一步将从更一般的非线性互联系统出发, 将线性互联系统可重构性的结果推广到非线性互联系统中, 并将其应用于实际系统中.
| [1] |
姜斌, 冒泽慧, 杨浩.
控制系统的故障诊断与故障调节[M]. 北京: 国防工业出版社, 2009.
Jiang B, Mao Z H, Yang H. Fault diagnosis and fault accommodation for control systems[M]. Beijing: National Defense Industry Press, 2009. |
| [2] |
周东华, 叶银忠.
现代故障诊断与容错控制[M]. 北京: 清华大学出版社, 2000.
Zhou D H, Ye Y Z. Modern fault diagnosis and fault-tolerant control[M]. Beijing: Tsinghua University Press, 2000. |
| [3] | Blanke M, Kinnaert M, Lunze J, et al. Diagnosis and fault-tolerant control[M]. Berlin, Germany: Springer, 2006. |
| [4] |
胡昌华, 许化龙.
控制系统的故障诊断与故障调节[M]. 北京: 国防工业出版社, 2000.
Hu C H, Xu H L. Fault diagnosis and fault-tolerant control analysis and design for control systems[M]. Beijing: National Defense Industry Press, 2000. |
| [5] | Wu N E, Zhou K M, Salomon G. Control reconfiguration of linear time-invariant systems[J]. Automatica, 2000, 36(11): 1767–1771. DOI:10.1016/S0005-1098(00)00080-7 |
| [6] | Staroswiecki M. On reconfigurability with respect to actuator failures[J]. IFAC Proceedings Volumes, 2002, 35(1): 257–262. |
| [7] | Ren W J, Yang H, Jiang B. Fault recoverability analysis of nonlinear systems:A piecewise affine system approach[J]. International Journal of Control, Automation and Systems, 2017, 15(2): 547–556. DOI:10.1007/s12555-015-0454-8 |
| [8] | Yang H, Jiang B, Staroswiecki M. Fault recoverability analysis of switched systems[J]. International Journal of Systems Science, 2012, 43(3): 535–542. DOI:10.1080/00207721.2010.517861 |
| [9] |
王大轶, 屠园园, 刘成瑞, 等.
航天器控制系统可重构性的内涵与研究综述[J]. 自动化学报, 2017, 43(10): 1687–1702.
Wang D Z, Tu Y Y, Liu C R, et al. Connotion and research of reconfigurability for spacecraft control systems:A review[J]. Acta Automation Sinica, 2017, 43(10): 1687–1702. |
| [10] | Liu Y Y, Slotine J J, Barabasi A L. Controllability of complex networks[J]. Nature, 2011, 473(7346): 167–173. DOI:10.1038/nature10011 |
| [11] |
杨浩, 姜斌, 周东华.
互联系统容错控制的研究回顾与展望[J]. 自动化学报, 2017, 43(1): 9–19.
Yang H, Jiang B, Zhou D H. Results and perspective on fault tolerant control for interconnected systems[J]. Acta Automation Sinica, 2017, 43(1): 9–19. |
| [12] | Antonelli G. Interconnected dynamic systems:An overview on distributed control[J]. IEEE Control Systems, 2013, 33(1): 76–88. DOI:10.1109/MCS.2012.2225929 |
| [13] | Yang H, Jiang B, Staroswiecki M, et al. Fault recoverability and fault tolerant control for a class of interconnected nonlinear systems[J]. Automatica, 2015, 54: 49–55. DOI:10.1016/j.automatica.2015.01.037 |
| [14] |
段海滨, 邱华鑫, 范彦铭.
基于捕食逃逸鸽群优化的无人机紧密编队协同控制[J]. 中国科学:技术科学, 2015, 45(6): 559–572.
Duan H B, Qiu H X, Fan Y M. Unmanned aerial vehicle close formation cooperative control based on predatory escaping pigeon-inspired optimization[J]. Scientia Sinica Technologica, 2015, 45(6): 559–572. |
| [15] | Kazerooni S, Khorasani K. Optimal consensus algorithms for cooperative team of agents subject to partial information[J]. Automatica, 2008, 44(11): 2766–2777. DOI:10.1016/j.automatica.2008.04.016 |
| [16] |
宗群, 王丹丹, 邵士凯, 等.
多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017, 49(3): 1–14.
Zong Q, Wang D D, Shao S K, et al. Research status and development of multi UAV coordinated formation flight control[J]. Journal of Harbin Institute of Technology, 2017, 49(3): 1–14. |
| [17] |
胡寿松.
自动控制原理[M]. 第6版. 北京: 科学出版社, 2013.
Hu S S. The principle of automatic control[M]. 6th ed. Beijing: Science Press, 2013. |
| [18] | Zhang X, Polycarpou M M, Parisini T. Fault diagnosis of a class of nonlinear uncertain systems with Lipschitz nonlinearities using adaptive estimation[J]. Automatica, 2010, 46(2): 290–299. DOI:10.1016/j.automatica.2009.11.014 |
| [19] | Shao S, Yang H, Jiang B, et al. Decentralized fault tolerant control for a class of interconnected nonlinear systems[J]. IEEE Transactions on Cybernetics, 2018, 48(1): 178–186. DOI:10.1109/TCYB.2016.2627682 |
| [20] |
宗群, 刘文静, 窦立谦, 等.
分布式网络化控制系统故障诊断方法的研究[J]. 控制与决策, 2008, 23(6): 672–676.
Zong Q, Liu W J, Dou L Q, et al. Fault diagnosis of distributed networked control system[J]. Control and Decision, 2008, 23(6): 672–676. |
| [21] | Pasqualetti F, Zampieri S, Bullo F. Controllability metrics, limitations and algorithms for complex networks[J]. IEEE Transactions on Control of Network Systems, 2014, 1(1): 40–52. DOI:10.1109/TCNS.2014.2310254 |
| [22] |
宗群, 苏芮, 王婕, 等.
高超声速飞行器自适应高阶终端滑模控制[J]. 天津大学学报(自然科学与工程技术版), 2014, 47(11): 1031–1037.
Zong Q, Su R, Wang J, et al. Adaptive high-order terminal sliding mode control for hypersonic flight vehicle[J]. Journal of Tianjin University(Science and Technology), 2014, 47(11): 1031–1037. |
| [23] | Etkin B. Dynamics of atmospheric flight[M]. Chicago, IL, USA: Courier Corporation, 2012. |
| [24] | Troub B, Montalvo C. Meta aircraft controllability[C]//AIAA Atmospheric Flight Mechanics Conference. Reston, VA, USA: AIAA, 2016: 2016-3395. |
| [25] | Jung D. Hierarchical path planning and control of a small fixed wing UAV: Theory and experimental validation[D]. Atlanta, GA, USA: Georgia Institute of Technology, 2007. http://www.researchgate.net/publication/27535176_Hierarchical_Path_Planning_and_Control_of_a_Small_Fixed-wing_UAV_Theory_and_Experimental_Validation |