



0 引言
四旋翼无人机是能够垂直起降和悬停的6自由度无人机.相比其它无人机,其结构简单稳定,具有更强的机动性、更好的空气动力学、良好的环境感知能力等诸多优势.因此无人机被广泛应用于航拍、短距离运输、恶劣环境勘探等方面.但是在一些领域,如作战防御、协同侦察等,往往需要采用多无人机编队控制来实现.总的来说,研究四旋翼无人机编队控制具有重要的理论与应用价值.
在无人机编队方面,很多学者已经做出了不错的成果.目前研究多无人机编队控制的方法有很多,主要包括领航—跟随法、虚拟领航法和基于行为法等.文[1]将无人机模型方程看成1阶动态系统,设计其渐近时间编队的方案.文[2]则把无人机模型看成2阶线性系统,研究多无人机编队控制问题.文[3]考虑相对完善一点的无人机系统,提出了虚拟领航者的多无人机编队控制策略.文[4-6]发现无人机编队飞行与生物群体社会性行为具有相似性,提出了一种基于鸽群行为机制的多无人机自主编队控制方法,并提出新型仿生智能计算方法——鸽群优化算法.
目前,大部分的编队控制得到的是渐近的结果.比如,在文[7-8]中提出了当且仅当网络包含有向生成树时,可以实现编队.文[9]给出了能够保证系统实现渐近编队控制的充分必要条件.文[10]提出了一种基于采样控制的方法,并且给出了2阶多个体系统编队问题可解性的等价条件.文[11]考虑了具有非均匀时变时滞的多个体系统的编队问题,并提出了两种控制方法来实现目标.此外,文[12-14]也做了很多相关的工作.
在研究编队中一个最重要的问题就是关于收敛速度的问题,与渐近收敛相比,能够得到有限时间收敛的结果更加实际.已有不少文献提出了多个体系统的有限时间编队方法.文[15]讨论了1阶多个体系统的编队问题,提出了如何在梯度不光滑的情况下实现有限时间编队.当节点数量特别多的时候,文[16]把节点分为两类,一类可以获得全局信息,另一类只可以获得局部信息,并指出在两类节点共同作用情况下的有限时间编队控制策略.针对2阶多个体系统,有3大类方法研究其有限时间编队问题[17-20].针对没有领导节点的多个体系统,使用齐次性方法可以实现有限时间编队,但是没办法估计收敛时间[17].针对领航—跟随系统,终端滑模控制方法被用来得到有限时间编队控制结果,但是这个方法不是分布式的[18].加幂积分方法可以同时解决无领航系统和领航—跟随系统的有限时间编队控制问题,但是其结果也不是分布式的,而且其过程较为复杂[19].最近,结合齐次性方法和终端滑模方法,一种新颖的有限时间分布式控制策略被提出[20].
针对扰动的处理,滑模控制具有较好的鲁棒性,但是由于滑模控制算法要求扰动是有界的且上下界已知,当扰动上界未知时,其控制效果并不理想[21].除了上述的滑模控制方法可以处理扰动,还有自适应鲁棒控制[22]、预测控制[23]、反步法[24]、自抗扰控制[25-26]等.但是对于未知且不可建模的扰动,自抗扰控制中的扩张状态观测器(ESO)效果更加突出. ESO能够实时估计无人机系统的内部不确定性和外部扰动的总作用量,并在控制信号中补偿掉,实现非线性不确定扰动的动态补偿线性化[27].
本文旨在运用分布式滑模控制方法,在有限时间内实现多无人机系统的编队控制.同时结合了ESO对扰动进行估计和处理.首先,对多个无人机系统进行建模,其中分为无人机的位置和姿态两个子系统.其次,分别根据位置子系统和姿态子系统的控制要求,基于齐次性方法设计分布式的滑模面,当系统状态在滑模面上时,可以在有限时间内实现目标.再次,设计滑模控制策略,实现带有界干扰的多无人机系统在有限时间内到达滑模面.最后,当存在未知且不可建模的扰动时,用扩张状态观测器对扰动进行估计并且加以补偿,以提高系统的抗干扰能力.
1 预备知识 1.1 图论知识图论知识对于多个体系统的研究,起到了非常重要的作用.在本小节中首先需要简要地介绍一些图论的基本概念和结论.
一个n阶加权的无向网络G=(Π,ε,A)是由一组节点Π={π1,π2,…,πN},一组无向边ε∈Π×Π和一个加权邻接矩阵A=[aij]N×N所组成.在该无向网络G中,无向边εij由无序的节点对(πi,πj)来表示,这意味着节点πi和πj可以相互交换.根据邻接矩阵的定义,在无向网络G中,当且仅当一条边(πi,πj)存在时,aij=aji且aij、aji均为正数. A=[aij]N×N是一个代表网络结构的耦合矩阵,即网络的加权邻接矩阵.拉普拉斯矩阵L=[lij]N×N可以表示为
对无人机位置和姿态的控制,是通过控制4个无刷直流电机的转速来实现各自升力的变化,进而改变无人机的飞行位置以及飞行姿态.四旋翼无人机的动力学模型是一个多输入多输出且强耦合的欠驱动系统,根据拉格朗日方程,建立多无人机的动力学模型如式(1)和式(2)所示:
|
(1) |
|
(2) |
其中,式(1)表示的是位置子系统,式(2)表示的是姿态子系统. [xi,yi,zi]表示第i架无人机质心在惯性坐标系中的位置坐标;[φi,θi,ψi]表示第i架无人机3个姿态的欧拉角,分别为翻滚角、俯仰角和偏航角;飞行器半径l表示每个旋翼末端到无人机重心的距离;uir(r=1,2,3,4)表示对应的控制器;m表示无人机的总质量;Ii(i=1,2,3)代表围绕每个轴的转动惯量;Qi(i=1,2,3,4,5,6)为阻力系数;g为重力加速度;dir(r=1,2,3,4,5,6)表示扰动.
1.3 假设和引理在给出本文的主要结果之前,先给出以下的几个假设以及符号,以便后文的证明.
假设1 非线性函数dir表示的是多无人机系统(1)和系统(2)中的参数不确定性以及外界干扰,假定它满足条件:

|
(3) |
其中,αi>0是常数.
假设2 假设系统(1)中dir的导数满足条件:

|
(4) |
其中,βi>0是常数.
引理1[24] 假设x(t)是方程
该引理是LaSalle不变性原理在非光滑情况的推广.
接下来,为了进行有限时间收敛性的分析,分别给出向量函数、标量函数和系统的齐次性定义.
定义1 令f(x)=[f1(x),…,fk(x)]T:Rn→Rn为一向量函数.若对任意的ε>0,存在[r1,…,rn]∈Rn,其中ri>0,i=1,…,n,使得满足:

|
(5) |
其中,k≥-max{ri,i=1,…,n},称f(x)关于(r1,…,rn)具有齐次度k.
定义2 令V(x):Rn→R为一个连续函数.若对任意一个ε>0,存在σ>0和(r1,…,rn)∈Rn,其中ri>0(i=1,…,n),使得

|
(6) |
则称f(x)关于[r1,…,rn]具有齐次度σ.
定义3 若向量函数f(x)是齐次的,则系统
引理2 若系统
在第2小节的控制器设计中,将分别对这两个子系统进行设计,以满足实际的控制要求.
2 控制器设计在本小节中,研究分析了多个无人机系统的有限时间编队问题,通过设计一个滑模面以及相应的滑模控制器,使得系统(1)和系统(2)的状态能够在有限时间内实现编队.
2.1 位置子系统控制器设计 2.1.1 滑模面的设计首先,对位置子系统(1)进行分析设计.令Ξi=[xi,yi,zi]T,则式(1)位置子系统的动力学模型为
|
(7) |
其中,Ξi表示第i架无人机的位置;


|
为控制器系数;φi、θi、ψi分别为第i架无人机的3个姿态角信息;
通过设计位置控制律ui1,实现位置编队.由位置子系统(1)定义:
|
(8) |
假设虚拟控制输入
根据无人机位置子系统编队控制要求,给出一个新型的滑模面,如式(9)所示:
|
(9) |
其中,μ1、μ2是两个连续的奇函数且满足:yμi(y)>0(∀y≠0)且有μi(y)=ciy+o(y)(在y=0附近),ci(i=1,2)为正数,o(·)表示在零附近的关于变量y的一个高阶无穷小函数且满足前面的条件. Δi、Δj分别表示无人机达到位置一致时的相对距离,
定理1 假设多无人机系统是无向连通的,若其位置子系统(7)的状态处于所设计的滑模面(9)上,那么该多无人机系统就能够在有限时间内实现位置系统的编队控制.
证明 考虑当系统状态在滑模面上,即当Si=0时,有:

|
(10) |
此时:

|
(11) |
取李亚普诺夫函数:

|
(12) |
对其进行求导可以得到:

|
(13) |
根据引理1可知,只要所构造的李亚普诺夫函数是光滑的,Dini导数就会变成常规导数,其不变集可表示为



因为
|
(14) |
而且由于

|
(15) |
根据式(15),可得:
|
即
由于无向图A是连通的,所以能够得到∀j≠i,Ξj=Ξi.所以,有∀j≠i,vi=vj,Ξj=Ξi,则可根据引理1有,当t→∞时,
根据给定的假设μ1、μ2是两个连续的奇函数,可以将


|
(16) |

|
(17) |
令




根据李亚普诺夫函数的导数
在本小节中,将根据式(9)所给出的滑模面,设计一个控制器使得位置轨迹能够在有限时间内到达滑模面.由式(9)可以看出,第i架无人机的滑模状态Si只与自己及相邻无人机的位置和速度信息有关,即是一个分布式变量.那么,利用滑模状态Si,设计控制器:
|
(18) |
其中,
定理2 在假设1和假设2均满足的前提下,选取滑模面(9),并且设计如式(18)所示的滑模控制器,多无人机系统的位置子系统(7)就能够在有限时间内到达滑模面(9).
证明 由系统(7)可知,滑模变量Si可写为

|
(19) |
将控制器(18)代入式(19),化简可以得到:

|
(20) |
取李亚普诺夫函数
|
(21) |
由式(21)可以看出,只要控制参数Kij设计为满足Kij-βi>δ>0,就能得到
为了实现φi、θi对φid、θid的跟踪,需要对φid、θid进行求解.由式(10)可知:
|
(22) |
化简可得:

|
(23) |
此时,用φid、θid、ψid分别代替φi、θi、ψi则有:

|
(24) |
由式(24)可以解得:
|
(25) |
得到φid、θid后,就可以解得位置控制律,如式(26)所示:
|
(26) |
接下来,对姿态子系统(2)进行分析设计.因为设计过程与位置子系统的设计基本类似,所以本节中只简要介绍大致过程.
由于无人机的3个姿态角的动力学模型形式类似,可令Ωi=[φi,θi,ψi]T,将式(2)中姿态子系统的动力学模型变形为
|
(27) |
其中,Ωi表示多智能体系统中第i架无人机的姿态角信息;ωi表示第i架无人机的姿态角速度;Fi=
给出如式(28)所示的滑模面:

|
(28) |
定理3 假设多无人机系统是无向连通的,若姿态子系统的状态变量处于所设计的滑模面(28)上,那么该多无人机系统就能够在有限时间内实现姿态系统的编队控制.
证明 考虑当系统状态在滑模面上,即当Si=0时,有方程:

|
(29) |
此时:

|
(30) |
取李亚普诺夫函数:

|
(31) |
后面的证明类似于定理1后面的证明,此处省略.
因此,系统(29)是全局有限时间稳定的,多无人机系统能够在有限时间内实现姿态系统的编队控制.
2.2.2 滑模控制器设计根据式(28)所给出的滑模面可以看出,第i架无人机的滑模状态Si只与自己及相邻无人机的姿态角和角速度有关.设计控制器:

|
(32) |
其中,
定理4 在假设1和假设2均满足的前提下,选取滑模面(28),并且设计如式(32)所示的滑模控制器,多无人机系统的姿态子系统(27)就能够在有限时间内到达滑模面(28).
证明 此处证明类似于定理2的证明,此处略去.
2.3 扩张状态观测器(ESO)设计在假设1和假设2中,
在这节中,引入扩张状态观测器(ESO),用来估计并补偿系统可能存在的不确定的扰动.采用ESO控制策略,将无人机系统的所有的已知和未知扰动当成总扰动,记作Di(i=1,…,6).
以俯仰角θ为例,系统的扩张状态方程为
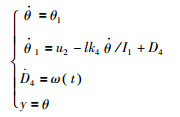
|
(33) |
俯仰角系统的状态观测器,即ESO表达式为
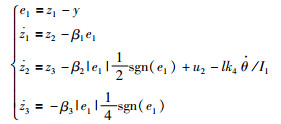
|
(34) |
式(42)和式(41)相减,误差方程为
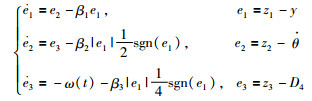
|
(35) |
选取适当的参数β1、β2、β3,ESO系统能够很好地估计俯仰角系统的状态变量θ、

|
(36) |
这样,无人机俯仰角系统的总扰动D4将被估计出来,并且可以实施补偿.
同样,对于其它5个自由度,也可以用ESO估计出每个自由度的总扰动.这样,这个无人机系统的总扰动Di将被估计并且补偿.
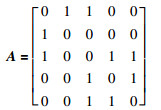
3 仿真分析考虑一个具有5个飞行器的系统,相应的连接图如图 1所示.

|
| 图 1 5个无人机的无向图 Figure 1 Undirected graph of 5 UAV |
其邻接矩阵定义为
|
无人机系统模型的参数见表 1.
| 参数 | 含义 | 数值 | 单位 |
| m | 质量 | 2 | kg |
| l | 半径 | 0.2 | m |
| g | 重力加速度 | 9.8 | m·s-2 |
| I1 | x轴转动惯量 | 1.25 | kg·m2 |
| I2 | y轴转动惯量 | 1.25 | kg·m2 |
| I3 | z轴转动惯量 | 2.5 | kg·m2 |
在仿真环境中,位置子系统中以X轴为例,选取5架无人机的X轴的初始位置为xi=[0 8 -2 4 -6],X轴的初始位置的变化率为vi=[0 4 -3 3 -1].姿态子系统中以翻滚角为例,设计5架无人机的初始翻滚角为φi=[0 5 -1 8 -7],初始翻滚角的变化率为
选取bi=[0.1 0.1 0.1 0.1 0.1]T,di=[sint sint sint sint sint]T.安全距离Δi=[1 2 3 4 5]T.此时,无人机的初始位置及其变化率的收敛情况如图 2、图 3所示.

|
| 图 2 无人机在X轴上的移动情况 Figure 2 The movement of UAV on the X axis |

|
| 图 3 无人机在X轴上的速度 Figure 3 The speed of the UAV on the X axis |
从图 2和图 3可知,5架无人机在分布式滑模控制器的作用下,最终以安全距离Δi达到一致,实现在位置上的编队控制.
5架无人机的翻滚角和其变化率的收敛情况如图 4和图 5所示.

|
| 图 4 翻滚角的变化情况 Figure 4 The change of roll angle |

|
| 图 5 翻滚角速度的变化情况 Figure 5 The change of roll angular velocity |
从图 4可得,5架无人机的翻滚角在初始值不同的情况下,通过本文设计的分布式滑模控制器,最终趋于一致,表明了分布式滑模控制器很好的控制效果.
从图 5可以看出,翻滚角的速度在初始值不同的情况下,运用分布式滑模控制器,同样能够达到一致.并且翻滚角的速度会达到一个固定值不变,这样无人机就能够实现编队控制.
当di未知并且不可建模的时候,采用上述的扰动控制策略,不能有效地实现多无人机的编队控制.具体仿真如图 6和图 7所示.

|
| 图 6 翻滚角的变化情况 Figure 6 The change of roll angle |

|
| 图 7 翻滚角速度的变化情况 Figure 7 The change of roll angular velocity |
从图 6和图 7可得,当di未知且不可建模时,翻滚角及其速度的变化都是不稳定的,并且在短时间内变化特别剧烈,这样也就无法实现无人机的编队控制.
对于这样未知并且不可控的扰动,本文采用ESO对未知的扰动进行估计,并将估计后的扰动进行补偿,从而实现对无人机扰动的控制,也便于实现分布式滑模控制的编队控制.采用ESO对扰动进行估计,仿真结果如图 8和图 9所示.

|
| 图 8 翻滚角的变化情况 Figure 8 The change of roll angle |

|
| 图 9 翻滚角速度的变化情况 Figure 9 The change of roll angular velocity |
图 8和图 9表明,当用ESO对扰动进行估计并补偿时,分布式滑模控制的控制效果明显,最终5架无人机能够保持相对一致,即能实现无人机之间的编队控制.
4 结论本文基于齐次性方法设计分布式的滑模面,对无人机的位置和姿态子系统分别设计相应的滑模控制器,实现了多无人机系统的有限时间编队控制.首先,对于位置子系统,预先设定好防止无人机之间相互碰撞的安全距离,采用分布式滑模控制,使得多无人机在位置上保持安全距离进行编队飞行.其次,对于姿态子系统,在不同初始状态下,运用分布式滑模控制,使得各个姿态角在有限时间内达到一致并保持.然后,考虑不同性质的扰动,特别是当扰动未知且不可建模的情况下,采用自抗扰控制中的非线性ESO方法,对此类扰动进行总的估计并且补偿,以提高系统的抗干扰能力.最终,选取5架无人机,对多无人机的位置和姿态进行仿真,以此验证本文所提控制策略有效性.
| [1] | Kuriki Y, Namerikawa T. Consensus-based cooperative control for geometric configuration of UAVs flying in formation[C]//Proceedings of the IEEE SICE Conference. Piscataway, NJ, USA: IEEE, 2013: 1237-1242. |
| [2] | Olfati-Saber R, Fax J A, Murray R M. Consensus and cooperation in networked multi-agent systems[J]. Proceedings of the IEEE, 2007, 95(1): 215–233. DOI:10.1109/JPROC.2006.887293 |
| [3] |
王品, 姚佩阳.
多无人机系统分布式编队控制[J]. 计算机工程与应用, 2016, 52(16): 1–6.
Wang P, Yao P Y. Method of distributed UAV formation control[J]. Computer Engineering and Applications, 2016, 52(16): 1–6. DOI:10.3778/j.issn.1002-8331.1512-0236 |
| [4] |
邱华鑫, 段海滨, 范彦铭.
基于鸽群行为机制的多无人机自主编队[J]. 控制理论与应用, 2015, 32(10): 1298–1304.
Qiu H X, Duan H B, Fan Y M. Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J]. Control Theory & Applications, 2015, 32(10): 1298–1304. |
| [5] | Duan H B, Qiao P X. Pigeon-inspired optimization:A new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7(1): 24–37. DOI:10.1108/IJICC-02-2014-0005 |
| [6] | Zhang S J, Duan H B. Gaussian pigeon-inspired optimization approach to orbital spacecraft formation reconfiguration[J]. Chinese Journal of Aeronautics, 2015, 28(1): 200–205. DOI:10.1016/j.cja.2014.12.008 |
| [7] | Jadbabaie A, Lin J, Morse A S. Coordination of groups of mobile autonomous agents using nearest neighbor rules[J]. IEEE Transactions on Automatic Control, 2003, 48(6): 985–1001. |
| [8] | Ren W, Beard R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005, 51(5): 655–661. |
| [9] | Yu W W, Chen G R, Cao M. Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems[J]. Automatica, 2010, 46(6): 1089–1095. DOI:10.1016/j.automatica.2010.03.006 |
| [10] | Gao Y P, Wang L, Xie G M. Consensus of multi-agent systems based on sampled-data control[J]. International Journal of Control, 2009, 82(12): 2193–2205. DOI:10.1080/00207170902948035 |
| [11] | Sun Y G, Wang L. Consensus problems in networks of agents with double-integrator dynamics and time-varying delays[J]. International Journal of Control, 2009, 82(10): 1937–1945. DOI:10.1080/00207170902838269 |
| [12] |
林瑜阳, 李钟慎.
基于连通二部图的二阶多智能体系统分组一致性分析[J]. 信息与控制, 2017, 46(1): 7–12.
Lin Y Y, Li Z S. Group consensus analysis on second-order multi-agent systems based on the connected bipartite graph[J]. Information and Control, 2017, 46(1): 7–12. |
| [13] |
黄红伟, 黄天民, 吴胜, 等.
基于事件触发的二阶多智能体系统平均一致性[J]. 信息与控制, 2016, 45(6): 729–734.
Huang H W, Huang T M, Wu S, et al. Event-triggered average consensus of second-order multi-agent systems[J]. Information and Control, 2016, 45(6): 729–734. |
| [14] |
赵丹, 胡爱花, 刘丹.
牵引控制间歇通讯多智能体网络的一致性[J]. 信息与控制, 2017, 46(2): 238–242.
Zhao D, Hu A H, Liu D. Consensus of multi-agent networks with intermittent communication via pinning control[J]. Information and Control, 2017, 46(2): 238–242. |
| [15] | Cortes J. Finite-time convergent gradient flows with applications to network consensus[J]. Automatica, 2006, 42(11): 1993–2000. DOI:10.1016/j.automatica.2006.06.015 |
| [16] | Xiao F, Wang L, Chen J. Finite-time formation control for multi-agent systems[J]. Automatica, 2009, 45(11): 2605–2611. DOI:10.1016/j.automatica.2009.07.012 |
| [17] | Wang X L, Hong Y G. Finite-time consensus for multi-agent networks with second-order agent dynamics[J]. IFAC Proceedings Volumes, 2008, 41(2): 15185–15190. DOI:10.3182/20080706-5-KR-1001.02568 |
| [18] | Khoo S Y, Xie L H, Man Z H. Robust finite-time consensus tracking algorithm for multirobot systems[J]. IEEE Transactions on Mechatronics, 2009, 14(2): 219–228. DOI:10.1109/TMECH.2009.2014057 |
| [19] | Li S H, Du H B, Lin X Z. Finite-time consensus algorithm for multi-agent systems with double-integrator dynamics[J]. Automatica, 2011, 47(8): 1706–1712. DOI:10.1016/j.automatica.2011.02.045 |
| [20] | Yu W W, Wang H, Cheng F, et al. Second-order consensus in multiagent systems via distributed sliding mode control[J]. IEEE Transactions on Cybernetics, 2017, 47(8): 1872–1881. DOI:10.1109/TCYB.2016.2623901 |
| [21] |
马亚丽, 宗群, 董琦, 等.
执行器饱和情况下四旋翼无人机的快速终端滑模控制[J]. 信息与控制, 2017, 46(2): 204–210.
Ma Y L, Zong Q, Dong Q, et al. Fast terminal sliding mode control for quadrotor unmanned aerial vehicle with actuator saturation[J]. Information and Control, 2017, 46(2): 204–210. |
| [22] | Zhao B, Xian B, Zhang Y. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J]. IEEE Transactions on Industrial Electronics, 2015, 62(5): 2891–2902. DOI:10.1109/TIE.2014.2364982 |
| [23] | Kang Y, Hedrick J K. Linear tracking for a fixed-wing UAV using nonlinear model predictive control[J]. IEEE Transactions on Control Systems Technology, 2009, 17(5): 1202–1210. DOI:10.1109/TCST.2008.2004878 |
| [24] | Azinheira J R, Moutinho A. Hover control of an UAV with backstepping design including input saturations[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 517–526. DOI:10.1109/TCST.2007.908209 |
| [25] | Huang Y, Xue W C. Active disturbance rejection control:Methodology and theoretical analysis[J]. ISA Transactions, 2014, 53(4): 963–976. DOI:10.1016/j.isatra.2014.03.003 |
| [26] | Gao T Y, Wang D D, Tao F. Control of small unconventional UAV based on an on-line adaptive ADRC system[J]. Applied Mechanics & Materials, 2014, 23(1): 1206–1211. |
| [27] | Han J Q. Auto-disturbances-rejection controller and its applications[J]. Control & Decision, 1998, 13(1): 19–23. |