



2. 中国科学院大学, 北京 100049
2. University of Chinese Academy of Sciences, Beijing 100049, China
0 引言
四旋翼飞行器操作简单灵活,机动性强,具有垂直起降、超低空飞行、定点悬停等特点,被大量应用于军事和民用领域.在测绘侦查、灾难救援、农林植保、智慧物流等领域,四旋翼飞行器正逐渐发挥着重要作用.由于四旋翼飞行器是一个非线性、强耦合的欠驱动系统,学者们围绕其控制问题进行了深入研究.
一般而言,建立带有准确参数的系统模型,是进行控制系统设计的基础.对四旋翼飞行器而言,目前常用的获取模型参数的方法是通过双线摆实验测定[1]或SolidWorks软件绘图估算[2].也有研究者试着在平衡点附近对动力学方程进行线性化得到近似模型,然后进行扫频辨识[3],这种方法需要大量实验且难以得到适用于全状态飞行的模型.当任务载荷等变化导致模型参数发生变化时,上述方法需要重新进行辨识,无法进行在线更新用于控制.基于贝叶斯理论的无色卡尔曼滤波器,也被研究者用于在线参数估计,该方法需要对噪声协方差矩阵进行反复调整且稳定性很难保证[4-5].
作为一种有效处理参数不确定性问题的方法,自适应控制将参数估计与控制算法设计相结合,已被广泛应用于机械臂[6-7]、欠驱动桥式吊车[8-9]等系统的控制.近年来,国内外也有不少研究者将自适应方法用于四旋翼飞行器的控制,如文[10]在悬停点附近基于小角度假设忽略高阶项,结合模型参考自适应方法,设计参考模型对参数不确定性进行消除,提高系统鲁棒性.文[11]针对恒值力和力矩扰动及质量中心未知造成的惯性参数不确定性,设计了自适应估计项引入控制器进行补偿.文[12]设计了自适应更新律,对力和力矩扰动的界进行估计,结合鲁棒比例—微分(proportional-derivative,PD)控制器进行补偿和抑制.文[13]基于浸入—不变集原理,设计自适应控制律对位置环的外力扰动进行抑制.文[14]针对姿态环转动惯量参数未知的情况,设计了一种自适应估计策略,与位置环PD控制相结合实现轨迹跟踪.文[15]将自适应思想与反步控制相结合,设计了两种控制策略对建模误差项进行估计和补偿.
以上文献中,研究者多是从控制的角度进行论述,而未就参数估计的效果展开讨论.本论文的创新之处,即在所设计自适应控制器的基础上,对参数估计的收敛性问题进行了分析,以提供一种同时解决控制误差收敛和参数辨识问题的思路.
具体而言,为实现四旋翼飞行器存在参数不确定性情况下的姿态和高度跟踪,本文利用线性滤波器对原高阶动力学系统进行降阶,继而设计自适应反馈控制策略,同时对系统参数进行在线更新,以保证系统稳定性和良好的跟踪性能.最后,给出了参数估计收敛到真实值需要满足的持续激励条件.
1 建模和问题描述四旋翼飞行器结构示意如图 1所示,为方便讨论,本体坐标系原点O、坐标轴xb和yb、螺旋桨编号顺序和旋转方向已在图中标出,本体坐标系zb轴由右手法则确定.四旋翼飞行器通过改变姿态实现位置调节,其中横滚运动由1、2号桨差速调节,俯仰运动由3、4号桨差速调节,偏航运动由1~4号桨的转速共同决定.

|
| 图 1 四旋翼结构示意图 Figure 1 Diagrammatic sketch of the quadrotor structure |
由于四旋翼飞行器横滚和俯仰角通常变化幅度不大(0.3 rad以内),其动力学方程可简化为[16-17]
|
(1) |
其中,p=[x,y,z]T表示飞行器在惯性坐标系中的位置,ϕ、θ、ψ分别代表横滚、俯仰、偏航三个方向的姿态角,m为飞行器质量,Ix、Iy、Iz分别代表飞行器关于本体坐标轴xb、yb、zb的转动惯量,R为从本体坐标系到惯性坐标系的旋转矩阵,e3=[0, 1, 1]T,g为重力加速度,u1为四旋翼飞行器总升力,u2、u3、u4分别为3个方向上的力矩.
从螺旋桨转速[ω1,ω2,ω3,ω4]T到力和力矩的对应关系为
|
(2) |
其中,κ和ρ分别为单个螺旋桨的升力系数和扭矩系数,l为原点O到螺旋桨中心的距离.
由于四旋翼飞行器有6个自由度,但只有4个控制输入,属于欠驱动系统,因而只能实现4个自由状态的跟踪控制.通常选择位置和航向,或高度和姿态作为控制目标,本文将高度h=-z和3个方向的姿态角ϕ、θ、ψ选为目标状态量,设计控制器实现质量和转动惯量存在不确定性情况下的高度和姿态跟踪,同时对惯性参数估计的收敛性问题进行分析.此时,控制输入不存在耦合,可进行高度和姿态的解耦,分别设计控制器.
本文作如下假定:
1) 期望高度轨迹hd∈L∞,其1阶、2阶、3阶导数存在且
2) 期望姿态角Ψd=[ϕd,θd,ψd]T∈L∞,其1阶、2阶、3阶导数存在且
由方程(1)可得高度动力学方程为
|
(3) |
左右两边同时乘以m,可将式(3)改写为

|
(4) |
定义高度跟踪误差:

|
(5) |
文[18]指出,构建线性滤波器对高阶系统进行降阶:

|
(6) |
可使得跟踪误差e1及其导数ė1的收敛特性与r1完全一致.其中,α1为正的常数.不难发现,只需将α1选为对角矩阵且对角线上的元素均为正,即可将结论推广到高维的情况.
此时,式(6)对时间求导并代入式(4)所表示的二阶系统可得
|
(7) |
令

|
(8) |
控制器设计为
|
(9) |
其中,k1、Γ1为正的常数值,通过调节其大小可改变控制器的暂态性能,
定义参数估计误差为

|
(10) |
选取李亚普诺夫函数:
|
(11) |
对时间求导,可得:
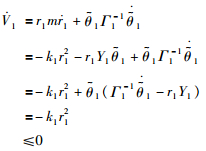
|
(12) |
由LaSalle不变性原理[19]可知,
由式(11)和式(12)可知,V1∈L∞,从而r1∈L∞,

|
(13) |
故ṙ1∈L∞.式(13)对时间求导,有:
|
(14) |
所以,

|
(15) |
联合式(13)可知:

|
(16) |
由Y1的定义可知其并不收敛到0,故有:

|
(17) |
即质量参数的估计能保证收敛到真实值.
3 姿态自适应控制 3.1 姿态控制器设计由方程(1)可得姿态动力学方程为
|
(18) |
可以看出,转动惯量参数以非线性的形式存在.将式(18)改写为
|
(19) |
令:
|
则式(19)可改写为

|
(20) |
可以看出,此时式(20)右侧满足参数线性化条件.
定义姿态跟踪误差:

|
(21) |
则可引入线性滤波器变量:

|
(22) |
其中,α2=diag([α21,α22,α23])为对角线元素均为正值的矩阵,e2=[e21,e22,e23]T.
线性滤波器变量(22)对时间求导,并代入式(20)可得
|
(23) |
其中,
|
(24) |
其中,k2、Γ2为正的对角阵,通过调节其大小可改变控制器的暂态性能;
定义参数估计误差为

|
(25) |
选取李亚普诺夫函数:
|
(26) |
对时间求导,可得:
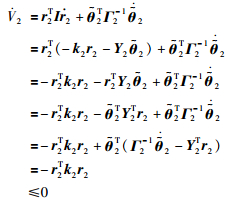
|
(27) |
由LaSalle不变性原理可知,
由式(26)和式(27)可知,V2∈L∞,从而r2∈L∞,


|
(28) |
故
|
(29) |
所以,

|
(30) |
联合式(28)可知:

|
(31) |

|
(32) |
其中,β1为正数,联合式(31)可得

|
(33) |
同时,文[20]指出,当系统输入频率个数不少于待辨识参数个数时,通常可以满足持续激励条件.
由式(25)和式(33)可知,在Y2满足持续激励条件的前提下,能够实现转动惯量渐近辨识的目标.此时,同时解决了控制误差收敛和参数辨识问题.
4 仿真验证为验证所提方法对高度和姿态的跟踪效果及参数估计的收敛效果,本文在Matlab编程环境下进行了仿真研究,并将所提方法与反馈线性化方法进行了比较.
期望的高度和姿态角轨迹设定为
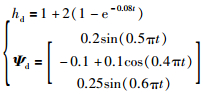
|
(34) |
质量和转动惯量设定为

|
(35) |
其中,
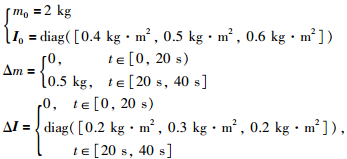
|
即假定20 s时质量和转动惯量发生变化.
系统的初始状态选为

|
(36) |
参数的估计初值设定为

|
(37) |
将控制器式(9)和式(24)应用于上述四旋翼系统,并选取控制增益:

|
(38) |
得到高度跟踪效果和质量估计效果如图 2、图 3所示,姿态跟踪效果和转动惯量估计效果如图 4、图 5所示.

|
| 图 2 高度跟踪效果 Figure 2 Performance of the height tracking |

|
| 图 3 质量估计效果 Figure 3 Performance of the mass estimation |

|
| 图 4 姿态跟踪效果 Figure 4 Performance of the attitude tracking |

|
| 图 5 转动惯量估计效果 Figure 5 Performance of the inertia estimation |
由图 2和图 4可知,所设计的控制器很好地实现了对期望高度和姿态的跟踪,即便在参数先验知识不准确或参数发生突变的情况下,也能迅速(5 s左右)进行调整.由图 3和图 5可知,所设计的参数更新律能够使得参数估计值快速收敛到最新的真值,质量和转动惯量的估计值都能在7 s内逼近真实值.这意味着,如果需要对系统进行辨识,可选定适当复杂的高度和姿态轨迹进行跟踪,通过本文所提的自适应方法,在稳定控制的前提下完成惯性参数辨识.
所提方法与基于标称模型设计的反馈线性化方法(用m0和diag(I0)分别代替式(9)中的

|
| 图 6 高度跟踪误差比较 Figure 6 Comparison of the errors of the height tracking |

|
| 图 7 姿态跟踪误差比较 Figure 7 Comparison of the errors of the attitude tracking |
由图 6和图 7可知,在质量和转动惯量发生变化前,反馈线性化方法由于具有参数的精确信息,能够实现高度和姿态的渐近跟踪,而所提方法在参数先验信息不准确时依然能够通过参数在线更新,实现对高度和姿态的跟踪控制.当质量和转动惯量发生变化时,反馈线性化方法对高度的控制出现了恒定的偏差(由质量增加引起的掉高),而所提方法在出现短暂偏差后迅速修正,实现了高度的跟踪控制.同时,所提方法对姿态的跟踪误差也远小于反馈线性化方法,其在0值附近的小幅变动,主要是由于仿真中正弦函数计算的舍入误差造成的.
5 结论本文提出了一种四旋翼飞行器姿态和高度的自适应跟踪控制策略,能够保证模型参数变化情况下的跟踪误差渐近收敛.同时,在满足持续激励条件下,参数的估计值能够收敛到真实值.仿真结果表明,即便在质量和转动惯量发生变化的情况下,所提算法依然能很好地实现对期望姿态和高度的跟踪,在所设定轨迹下参数估计快速收敛到真实值.本文并未考虑外部扰动的影响,如何将自适应策略与抵抗外部扰动的鲁棒控制方法相结合以发挥各自优势,将作为后续的研究内容.
| [1] |
全权, 戴训华, 魏子博, 等. 一种测量小型飞行器转动惯量与惯性积的方法: 中国, 201310479270. 0[P]. 2016-02-03. Quan Q, Dai X H, Wei Z B, et al. A method for measuring moment of inertia and inertial product of small aircraft, China: 201310479270. 0[P]. 2016-02-03. |
| [2] |
廖卫中, 宗群, 马亚丽.
小型四旋翼无人机建模与有限时间控制[J]. 控制理论与应用, 2015, 32(10): 1343–1350.
Liao W Z, Zong Q, Ma Y L. Modeling and finite-time control for quad-rotor mini unmanned aerial vehicles[J]. Control Theory & Applications, 2015, 32(10): 1343–1350. |
| [3] | Philipp N, Thomas R, Florian H. Open-loop quadrotor flight dynamics identification in frequency domain via closed-loop flight testing[C]//Proceedings of AIAA Guidance, Navigation, and Control Conference. Los Angeles, CA, USA: AIAA, 2015: 1539. |
| [4] | Julier S J, Uhlmann J K. Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations[C]//Proceedings of the 2002 American Control Conference. Piscataway, NJ, USA: IEEE, 2002: 887-892. |
| [5] | Ishihara S, Yamakita M. Gain constrained robust UKF for nonlinear systems with parameter uncertainties[C]//Proceedings of the 2016 European Control Conference. Piscataway, NJ, USA: IEEE, 2016: 1709-1714. |
| [6] |
高道祥, 薛定宇, 陈大力.
机器人位置/力混合鲁棒自适应控制[J]. 系统仿真学报, 2007, 19(2): 348–351.
Gao D X, Xue D Y, Chen D L. Robust adaptive position/force hybrid control for constrained robotic manipulators[J]. Journal of System Simulation, 2007, 19(2): 348–351. DOI:10.3969/j.issn.1004-731X.2007.02.030 |
| [7] |
王雪竹, 李洪谊, 王越超, 等.
柔性关节机器人高精度自适应反步法控制[J]. 信息与控制, 2016, 45(1): 1–7.
Wang X Z, Li H Y, Wang Y C, et al. High-precision adaptive back-stepping control of flexible joint robots[J]. Information and Control, 2016, 45(1): 1–7. |
| [8] |
马博军, 方勇纯, 王鸿鹏.
基于能量分析的桥式吊车系统抗干扰控制器设计[J]. 中南大学学报:自然科学版, 2005, 36(1): 169–173.
Ma B J, Fang Y C, Wang H P. Energy-based disturbance compensation control for an overhead crane system[J]. Journal of Central South University (Science and Technology), 2005, 36(1): 169–173. |
| [9] |
马博军, 方勇纯, 王宇韬, 等.
欠驱动桥式吊车系统自适应控制[J]. 控制理论与应用, 2008, 25(6): 1105–1109.
Ma B J, Fang Y C, Wang Y T, et al. Adaptive control for an under-actuated overhead crane system[J]. Control Theory & Applications, 2008, 25(6): 1105–1109. |
| [10] | Dydek Z T, Annaswamy A M, Lavretsky E. Adaptive control of quadrotor UAVs:A design trade study with flight evaluations[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1400–1406. DOI:10.1109/TCST.2012.2200104 |
| [11] | Antonelli G, Cataldi E, Arrichiello F, et al. Adaptive trajectory tracking for quadrotor MAVs in presence of parameter uncertainties and external disturbances[J]. IEEE Transactions on Control Systems Technology, 2017, PP(99): 1–7. |
| [12] | Islam S, Faraz M, Ashour R K, et al. Robust adaptive control of quadrotor unmanned aerial vehicle with uncertainty[C]//IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2015: 1704-1709. |
| [13] | Zhao B, Xian B, Zhang Y, et al. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J]. IEEE Transactions on Industrial Electronics, 2015, 62(5): 2891–2902. DOI:10.1109/TIE.2014.2364982 |
| [14] |
左宗玉. 四旋翼无人飞行器自适应轨迹跟踪控制[C]//Proceedings of the 30th Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2011: 2435-2439. Zuo Z Y. Adaptive trajectory control of a quadrotor unmanned aircraft[C]//Proceedings of the 30th Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2011: 2435-2439. |
| [15] |
张益鹏. 四旋翼无人机自适应控制与故障容错[D]. 南京: 南京邮电大学, 2014. Zhang Y P. Adaptive control and fault tolerant of quadrotor unmanned aerial vehicles[D]. Nanjing: Nanjing University of Posts and Telecomunications, 2014. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D623766 |
| [16] | Lee S J, Kim S, Johansson K H, et al. Robust acceleration control of a hexa-rotor UAV with a disturbance observer[C]//2016 IEEE 55th Conference on Decision and Control. Piscataway, NJ, USA: IEEE, 2016: 4166-4171. |
| [17] |
吴琛, 苏剑波.
四旋翼飞行器的轨迹跟踪抗干扰控制[J]. 控制理论与应用, 2016, 33(11): 1422–1430.
Wu C, Su J B. Trajectory tracking of quad-rotor based on disturbance rejection control[J]. Control Theory & Applications, 2016, 33(11): 1422–1430. |
| [18] |
方勇纯, 卢桂章.
非线性系统理论[M]. 1版. 北京: 清华大学出版社, 2009: 21-61.
Fang Y C, Lu G Z. Theory of nonlinear systems[M]. 1st ed. Beijing: Tsinghua University Press, 2009: 21-61. |
| [19] | Khalil H K. Nonlinear systems[M]. 3rd ed. New Jewsey, USA: Prentice Hall, 2002: 126-128. |
| [20] | Narendra K S, Annaswamy A M. Persistent excitation in adaptive systems[J]. International Journal of Control, 1987, 45(1): 127–160. DOI:10.1080/00207178708933715 |
| [21] | Tyukin I Y, Steur E, Nijmeijer H, et al. Adaptive observers and parameter estimation for a class of systems nonlinear in the parameters[J]. Automatica, 2013, 49(8): 2409–2423. DOI:10.1016/j.automatica.2013.05.008 |