



0 引言
磷酸铁锂电池和电池组由于其导电导热性能较好、能量存储效率较高,成为当前应用和研究的重点[1],电池组的电路等效模型参数和SOH(state of health)参数的建模和估计对于锂电池的应用有着十分重要的研究价值[2-3]. SOH是指在一定条件下电池所能充入或放出电量与电池标称容量的百分比,精确估计电池组SOH值,可以预测电池的剩余可用寿命(remaining useful life,RUL).多数健康状况评价的定义局限于电池老化的范畴,表征电池老化的主要参数是容量和内阻[4-5],常用的SOH估算方法有:直接放电法[6]、内阻法[7]、电化学阻抗分析、模型法. Ning等研究人员根据大量实验数据推导出锂电池的循环寿命经验模型[8],该模型考虑较多物理因素,通用性较差. Galeotti等提出一种基于模糊逻辑的SOH估计算法[9],通过交流阻抗值来估计SOH,该算法目前已经应用在某些锂电池管理系统中,但不适用于电动车的应用系统.文[10-11]提出神经网络相关算法,并应用于电池单体SOC估计算法中,粒子滤波方法是另一种自适应估计方法[12]. Kim利用Kalman滤波算法估计锂电池内阻和容量的变化规律[13],提出一种新的、有效的SOH估计方法,但存在模型参数不准确的问题.扩展Kalman滤波法(EKF)建立在标准Kalman滤波法的基础上,有效解决了模型参数的精度问题[14],但在强非线性条件下会导致有偏估计.近年来,有学者提出无迹Kalman滤波法(UKF),该方法对非线性系统具有较好的滤波效果,能够保持与EKF相同的计算冗余度,并达到二阶泰勒级数展开的精度要求[15-16].国内众多高校和科研院所正在积极开展锂离子电池应用方面的研究,已有研究者对基于UKF的锂电池SOH估计算法进行积极的研究和探索,得出重要的研究结论[17-18],但是较少考虑锂电池电路等效模型参数和在线SOC值对SOH估计结果的影响因素.吉林大学较早涉及锂电池SOH的研究领域,对基于Kalman滤波算法的SOH估计方法进行了初步的研究[19],但结果较少.
本文对磷酸铁锂电池和电池组SOH的精确估计方法进行深入研究,建立基于电池单体SOC的健康状况估计模型,提出基于双Kalman滤波算法的寿命预测方法,从而研究锂电池的容量损失机理和寿命影响因素.同时,针对磷酸铁锂电池组国内外正在进行积极的探索,基于其应用前景的广泛性,本文的研究结果具有较强的科学应用价值.
1 并联锂电池组模型锂电池组在新能源汽车系统中是一个由多个单体电池组成的模块集,电池单体通过并联达到所需的总电量要求,通过串联达到所需的总电压要求[20]. 图 1所示为电池单体两种形式串并联组合的示意图,图 1(a)表示先串联后并联形式(SP),该系统由m个单体电池串联,然后由n个串联单元并联组成. 图 1(b)表示先并联后串联形式(PS),该系统由n个单体电池并联,然后由m个并联单元串联组成.本文重点研究并联电池组模型建立和参数估计;利用电路等效模型如图 2所示[21-22],其中R0,i为欧姆内阻,R1,i和Ci的并联电路为极化等效电阻和电容,URC为极化电压,RC表示等效电阻和电容的并联支路,OCV为每个并联电池支路的开路电压(假设相同),Itotal为并联电池组总电流,αs,i为电流分流系数,s表示并联电池组电路中的每个串联支路.

|
| 图 1 单体电池串并联拓扑形式 Figure 1 Series and parallel topology for battery pack |

|
| 图 2 并联电池组电路等效模型 Figure 2 Equivalent circuit model for parallel battery pack |
本文提出双Kalman滤波模型,利用R-UKF滤波算法估计锂电池组模型参数,利用EKF滤波算法估计电池组寿命参数.在初始参数的基础上实时跟踪并更新模型参数,并使用更新后的模型参数和单体电池SOC值来矫正SOH的估算结果.该方法能够解决电池组模型参数时变性问题,从而提高参数估计和SOH估计结果的精度.
2.1 并联电池组估计模型锂电池组并联估计模型如图 3所示,该模型基于Kalman滤波算法为基础,其中利用k时刻电流Ik和k-1时刻电流Ik-1为状态输入,yk-1和Vk-1为观测输入和观测协方差,分别利用状态方程、观测方程和抗差UKF估计(R-UKF)方法迭代循环,进行电池组模型参数状态向量和观测向量的估计. λi,k为模型参数修正因子,两次迭代结果作为参数向量估计基础,最后更新列滤波增益和参数状态.

|
| 图 3 锂电池组并联估计模型 Figure 3 Estimation model for parallel battery pack |
图 4表示双Kalman滤波算法估计电池组模型参数和SOH的原理框图,其中xn为滤波器状态向量,en为误差向量,dn为电池组模型参数反馈向量.主要思路为:应用R-UKF估计电池组的电路等效模型参数,以此为基础计算得到单体SOC值,并利用EKF估计电池组SOH值,同时对R-UKF模型进行相应的抗差Kalman修正,最终得到精确的基于双Kalman滤波的模型参数估计值和SOH估计值.

|
| 图 4 基于双Kalman滤波的电池组循环寿命估计原理图 Figure 4 Cycle life estimation of battery pack schematic diagram based on D-KF |
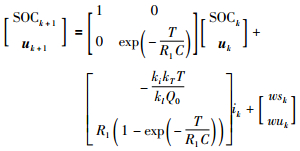
双Kalman滤波模型中的R-UKF模型为电路等效参数估计,状态量为SOC初始值,输出量为实时SOC和欧姆内阻R0,i,建立状态方程和观测方程为

|
(1) |
其中,xk为状态向量,zk为观测向量.根据一阶电路等效模型建立基于R-UKF的状态方程和观测方程,假设Q0为电池额定容量;T为采样时间;F[SOCk]为非线性方程;SOCk为k时刻单体电池SOC值;wk=(wsk,wuk)T为系统白噪声,其方差阵为Qk;vk为观测白噪声,其方差阵为Rk.结合一阶电路模型,建立R-UKF估计模型如式(2)和式(3):
|
(2) |

|
(3) |
综上所述,引入抗差估计原理,并结合磷酸铁锂电池电路等效模型参数,建立R-UKF算法:
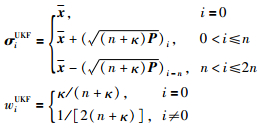
1) UKF采样点条件满足如下:
|
(4) |
给出采样点和采样点权值:
|
(5) |
式中,κ表示比例参数,可用于调节采样点和x之间的距离.当κ>0,采样点远离x;当κ=0时,采样点与x的距离与
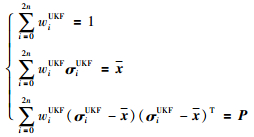
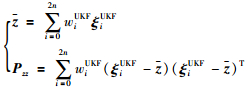
2) 根据UT变换,得出观测方程和协方差为
|
(6) |
3) 选择抗差估计权系数因子wi满足式(5),α为vi的均方差,实际情况下,


|
(7) |
4) 建立修正后的权值方程和协方差计算公式为
|
(8) |
|
(9) |
5) 将λ替换式(5)中的κ得到比例修正采样点,均值权值wim和方差权值wiC分别为
|
(10) |
双Kalman滤波模型中的EKF模型用于估计寿命参数SOH值,状态量为SOC,输出量为SOH.本文提出EKF滤波算法作为双Kalman估计方法的辅助滤波器,设置EKF系数为A,B和C,迭代循环估计模型参数R0,i、单体电池SOC和电池组SOH,算法具体步骤为:
1) 设定初始系统SOH状态估计值Mold和初始状态误差协方差Sold;
2) 得到当前时刻系统状态及噪声协方差先验估计值;
|
(11) |
3) 得到当前时刻的EKF增益矩阵K;

|
(12) |
4) 通过状态方程计算得到系统输出,将其和测量得到的输出对先验估计值进行校正,得到当前时刻的更新状态值和协方差:
|
(13) |
|
(14) |
5) 更新系统状态和协方差的值:

|
(15) |
最后回到第1)步重新迭代运算.通过这5个步骤可以迭代地估计出当前系统的最优估计值,各参数含义见表 1.
| 参数名称 | 参数含义 |
| Δt | 离散时间间隔 |
| w(k) | R-UKF滤波电池模型噪声 |
| r(k) | EKF滤波SOH估计噪声 |
| M(k) | 电池模型参数状态值 |
| N(k) | k时刻的系统输出值 |
| I | 当前时刻系统输入电流 |
| I(k) | k时刻系统输入值 |
| K | Kalman增益矩阵 |
| Mnew | SOH状态更新 |
| Mud | SOH状态更新先验值 |
| Mold | SOH状态更新初始值 |
| Cn | 电池额定容量 |
| Q | R-UKF滤波电池模型噪声协方差矩阵 |
| R | EKF滤波SOH估计噪声协方差矩阵 |
| A,B,C,D | 系统状态方程矩阵 |
| Nnew | 系统输出更新值(根据模型参数更新SOH) |
| Nmeasurement | 系统输出量测值(EKF算法SOH估计值) |
| ΔN | 系统输出更新值和量测值的差值 |
| E | 单位矩阵 |
| Snew | 协方差矩阵更新值 |
| Sud | 协方差矩阵先验值 |
| Sold | 协方差矩阵初始值 |
本文提出基于电池单体SOC值的电池组寿命预测方法,并联合双Kalman滤波算法同时估计电池模型参数和SOH值.根据图 2所示的电池组等效模型和相应的电路式(2)和式(3),电池组一条支路的电压变化值与SOC值之间的关系式为
|
(16) |
式中,U′(SOC)和U(SOC)对应两个采样时刻的开路电压值,CU为电压表示电池容量,R1和R0为该支路的极化内阻和欧姆内阻,τ为充放电时间常数.引入参数t和SOC表示电池容量Cs且有关系式

|
(17) |
式中,t′和t表示相同SOC值不同循环寿命时刻.若U(t)对应新电池SOH=100%,Cs≈0,则SOH估计模型可以进一步简化为
|
(18) |

|
(19) |
引入参数a,b,c,d和e分别为a=U1+I,b=-1/τ,c=U′1+I·R′1,d=-1/τ′,e=I·(R′1+R′0-R1-R0),利用上述双Kalman滤波过程可以得到参数k的实时估计值,以及SOH估计值满足式(21):

|
(20) |
利用SOH估计模型和双Kalman滤波过程,本文设计电池组SOH估计流程图如图 5所示.双Kalman滤波模型由R-UKF和EKF两个模块组成,量测数据zk为电池组电流电压实测值,作为两个滤波模块的输入值.左边虚线框为R-UKF滤波流程,初始化状态矩阵x0,并利用抗差UKF算法估计电池模型参数R0、R1和单体电池SOC值.右边虚线框为EKF滤波流程,在状态方程和观测方程的基础上,设置参数a,b,c,d和e,计算不同采样时刻电压差值U′(SOC)-U(SOC),并估计

|
| 图 5 基于双Kalman滤波的电池组寿命预测流程图 Figure 5 Cycle life estimation flow chart based on D-KF |
本文选用18650磷酸铁锂电池作为实验对象,额定电压为3.3 V,额定容量为1.1 Ah,充放电截止电压为2 V和3.65 V,电池估计参数为内阻R0和SOC.充放电实验硬件设计如图 6所示,该系统完成电池组均衡充放电任务.仿真实验利用NEDC循环充放电模式,并记录10个并联单体电池的外部数据,图 7(a)为NEDC功率/速度模型,图 7(b)为10个单体电池电压数据.数据显示:t0初始时刻单体电池电压最大值为3.433 7 V,最小电压为3.350 8 V;t1+为放电初始时刻,t2为放电中期,单体电池电压最大值与最小值间误差减小;t3-~t3+充电间隔和t5-时刻再次充电,最后保持电压3.31 V左右.综上所述,本文设计充放电电路对并联电池组具有一定的均衡作用,简化单体电池和电池组寿命预测的仿真工作.

|
| 图 6 锂电池组充放电管理系统硬件 Figure 6 Battery management system for lithium battery pack |

|
| 图 7 NEDC电池充放电实验数据 Figure 7 Experimental data of NEDC charge/discharge schematic |
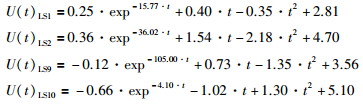
本文选取单体电池#1、#2、#9和#10进行深入研究,利用二阶参数拟合方法进行仿真,电压拟合结果分别表示为U(t)LS1,U(t)LS2,U(t)LS9和U(t)LS10.根据充放电实验数据,得到拟合电压公式:
|
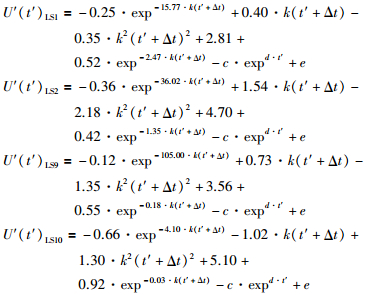
综合第3节理论推导、参数a,b,c,d和e的定义公式和式(19),利用NEDC充放电实验数据,建立单体电池#1、#2、#9和#10的寿命预测公式为
|
将单体电池#1、#2、#9和#10并联组成锂电池组,选取代表性数据如表 2所示,初始单体电池SOC值均为1(满充状态),放电倍率设置为0.5 C(放电电流为0.55 A).选取循环次数20、50、100、150和250作为电池组性能参数对照数据:
| 循环条件(25 ℃) | 放电倍率 /C |
电流变化 /A |
衰减容量 /% |
SOC估计误差 /% |
SOH估计误差 /% |
|
| SOC变化 | 循环次数 | |||||
| 1.0~0.02 | 20 | 0.5 | 2.18~0.32 | 2 | 2.34 | 1.22 |
| 0.8~0.01 | 50 | 0.5 | 2.15~0.30 | 5 | 2.21 | 1.45 |
| 0.7~0.05 | 100 | 0.5 | 2.10~0.10 | 7 | 1.34 | 1.63 |
| 0.6~0.08 | 150 | 0.5 | 2.08~0.10 | 9 | 1.12 | 2.54 |
| 0.5~0.10 | 200 | 0.5 | 1.95~0.03 | 12 | 0.95 | 2.63 |
| 0.5~0.10 | 250 | 0.5 | 1.90~0.05 | 15 | 0.98 | 2.60 |
1) 在温度环境相同的情况下,随着循环充放电次数的增加,SOC变化范围减小,SOC初始值从新电池的1减小到0.5.
2) 在放电倍率相同的情况下,并联电池组放电电流初始值减小,放电终止电流在100次循环时呈现上升趋势,表明随着循环次数的增加,放电终止电流减小.
3) 根据放电容量测量值,计算衰减容量随着循环次数的增加而增加,250次循环充放电后衰减率达到13%.
4) SOH估计误差控制在3%左右,100次循环次数以后估计误差明显增加,但能够收敛于2.6%左右.
5) SOC估计误差控制在2%左右,循环充放电初始估计误差较大,100次循环以后收敛于1%左右.
电池单体和电池组SOH估计结果曲线和估计误差曲线如图 8所示,其中图 8(a)中蓝色实线为实验SOH真实值,红色实线和绿色实线分别表示单体电池SOH估计值和电池组估计值.结果显示,放电初期,单体电池和电池组SOH估计值都能很好地收敛于真实值;放电末期,单体电池SOH估计结果趋近于真实值. 图 8(b)表示电池组SOH估计误差,结果显示,估计误差值控制在3%以内.

|
| 图 8 单体电池/电池组SOH估计误差曲线 Figure 8 SOH estimation error curve for battery cell/pack |
将双Kalman滤波算法的SOH初始值设为0.3(实际值为0.7)来进行脉冲放电,双Kalman算法估算误差如图 8(b)所示,鲁棒性测试实验结果如图 9所示,双Kalman算法的绝对误差值控制在0.3%左右,40次循环之后能够收敛到稳定误差,具有较高的锂电池组SOH估算精度.分析其原因:

|
| 图 9 双Kalman估计算法鲁棒性误差曲线 Figure 9 Robust error curve based on D-KF |
1) 双Kalman算法对SOH初始值并不敏感,即使对SOH初始值估计有较大误差,新算法能够通过自我调节作用获得较精确的结果;
2) 双Kalman算法利用R-UKF实时估计电池组模型参数,对SOH估计结果具有一定的矫正作用,解决初始值不准而造成的误差累积问题.
5 结论锂电池和锂电池组的循环寿命预测是目前大容量储能电池的重要研究内容之一.磷酸铁锂电池的寿命影响因素主要包括电池设计方案、电池组合结构、电池使用工况、电池一致性、工作温度、负荷强度、放电深度、SOC使用区域、充放电制度等.目前,提高锂电池组寿命的研究工作主要包括电池寿命的实验评价方法、电池寿命的影响因素、电池寿命的数学模型等.本文利用锂电池组电路等效模型和参数估计,提出基于双Kalman滤波算法的锂电池组寿命预测方法,利用抗差无迹Kalman滤波(R-UKF)估计电路等效模型参数,利用扩展Kalman滤波(EKF)估计锂电池SOH值.实验结果显示,新方法具有较高的估计精度和较好的鲁棒性,对于提高电池组的能量储存能力、利用率和循环寿命有着重要的应用价值.
| [1] |
谭晓军.
电池管理系统深度理论研究[M]. 广州: 中山大学出版社, 2014.
Tan X J. Depth theory research on battery management system[M]. Guangzhou: Zhongshan University, 2014. |
| [2] | Williard W H N, Chen C C, Pecht M. State of charge estimation for li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation[J]. International Journal of Electricand Power Energy System, 2014, 62: 783–791. DOI:10.1016/j.ijepes.2014.04.059 |
| [3] | Li D Z, Wang W, Ismail F. A mutated particle filter technique for system state estimation and battery life prediction[J]. IEEE Transitions onInstrumentation and Measurement, 2014, 63(8): 2034–2043. DOI:10.1109/TIM.2014.2303534 |
| [4] | Ng K S, Moo C S, Chen Y P, et al. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries[J]. Applied Energy, 2009, 86(9): 1506–1511. DOI:10.1016/j.apenergy.2008.11.021 |
| [5] |
孙庆娜. 锂离子电池容量衰减原因分析[D]. 苏州: 苏州大学, 2013. Sun Q N. Analysis of capacity loss of lithium battery[D]. Suzhou: Suzhou University Press, 2013. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=D337368 |
| [6] | Soren E, Philipp E, Lino G. Battery state-of-health perceptive energy management for hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2012, 61(7): 2893–2899. DOI:10.1109/TVT.2012.2203836 |
| [7] |
黄伟昭, 李小平, 张栋省, 等.
基于开路电压回升速率和交流阻抗相结合的一种锂离子电池SOH算法[J]. 新能源进展, 2014(1): 43–48.
Huang W S, Li X P, Zhang D S, et al. SOH estimation of Li-ion batteries by combining recovery rate of open circuit voltage with impedance[J]. Advances in New and Renewable Energy, 2014(1): 43–48. DOI:10.3969/j.issn.2095-560X.2014.01.008 |
| [8] | Ning G, Haran B, Popov B N. Capacity fade study of lithium-ion batteries cycled at high discharge rates[J]. Journal of Power Sources, 2003, 11(7): 160–169. |
| [9] | Galeotti M, Cinà L, Giammanco C, et al. Performance analysis and SOH (state of health) evaluation of lithium polymer batteries through electrochemical impedance spectroscopy[J]. Energy, 2015, 89: 678–686. DOI:10.1016/j.energy.2015.05.148 |
| [10] |
江华丽.
神经网络混合算法的应用研究[J]. 电子测量技术, 2014, 70(10): 59–61.
Jiang H L. The research of the neural network algorithm application[J]. Electronic Measurement Technology, 2014, 70(10): 59–61. |
| [11] | Dobrzański L A, Trzaska J, Dobrzańska-Danikiewicz A D. Use of neural networks and artificial intelligence tools for modeling, characterization, and forecasting in material engineering[M]. Holland: Elsevier, 2014: 161-198. |
| [12] |
黄玲, 谢徐欢.
随机非线性时滞控制系统的H∞滤波器设计[J]. 信息与控制, 2016, 45(1): 20–26.
Huang L, Xie X H. H∞ filter design for a class of stochastic non-linear time-delay control system[J]. Information and Control, 2016, 45(1): 20–26. |
| [13] | Kim J H, Cho B H. State-of-charge estimation and state-of-health prediction of a li-ion degraded battery based on an EKF combined with a per-unit system[J]. Energy, 2011, 60(9): 4249–4260. |
| [14] | Rezvanizaniani S M, Liu Z, Chen Y, et al. Review and recent advances in battery health monitoring and prognostics technologies for electric vehicle (EV) safety and mobility[J]. Journal of Power Sources, 2014, 256(1): 110–124. |
| [15] | Dave A, Christian A. Advanced mathematical methods of SOC and SOH estimation for lithium-ion batteries[J]. Journal of Power Sources, 2013, 224: 20–27. DOI:10.1016/j.jpowsour.2012.10.001 |
| [16] |
王常虹, 董汉成.
车用锂离子电池剩余使用寿命预测方法[J]. 汽车工程, 2015, 37(4): 84–87.
Wang C H, Dong H C. Remaining useful life prediction of automotive lithium-ion battery[J]. Automotive Engineering, 2015, 37(4): 84–87. |
| [17] |
芮国胜, 康健.
基于双卡尔曼滤波的系统偏差消除方法[J]. 系统工程与电子技术, 2005, 27(2): 234–236.
Rui G S, Kang J. Method of systematic error elimination based on double Kalman filters[J]. System Engineering and Electronics, 2005, 27(2): 234–236. DOI:10.3321/j.issn:1001-506X.2005.02.012 |
| [18] |
柏庆文. 基于无味卡尔曼滤波的电动汽车动力电池SOC估计[D]. 长春: 吉林大学, 2013. Bo Q W. Electric vehicle battery state-of-charge estimation based on Unscented-Kalmanfiltering[D]. Changchun: Jilin Uninversity Press, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10183-1013196048.htm |
| [19] |
薛辉. 动力锂离子电池组SOH估计方法研究[D]. 长春: 吉林大学, 2013. Xue H. The research on the method of power lithium ion battery pack state-of-health estimation[D]. Changchun: Jilin University Press, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10183-1013196016.htm |
| [20] | Singh A, Izadian A, Anwar S. Model based condition monitoring in lithium-ion batteries[J]. Journal of Power Sources, 2014, 268(6): 459–468. |
| [21] | Xing Y J, Ma E W M, Tsui K L, et al. An ensemble model for predicting the remaining useful performance of lithium-ion batteries[J]. Micro Electron Reliab, 2013, 53(6): 811–820. DOI:10.1016/j.microrel.2012.12.003 |
| [22] |
杨阳, 汤桃峰.
电动汽车锂电池PNGV等效电路模型与SOC估算方法[J]. 系统仿真学报, 2012, 24(4): 938–942.
Yang Y, Tang T F. FPGV equivalent circuit model and SOC estimation algorithm lithium batteries for electric vehicle[J]. Journal of System Simulation, 2012, 24(4): 938–942. |