



2. 东北大学流程工业综合自动化国家重点实验室, 辽宁 沈阳 110819;
3. 黑龙江科技大学管理学院, 黑龙江 哈尔滨 150022
2. State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University, Shenyang 110819, China;
3. School of Management, Heilongjiang University of Science and Technology, Harbin 150022, China
0 引言
随着新经济时代的来临,物流已逐渐被企业看作是扩展市场、提升自身竞争力和实现销售收入增长的重要环节[1].而面对庞大的建设与管理成本,很多企业选择将物流进行外包或与物流企业实现联盟化运营,这推动了3PL企业的发展,再加之信息技术的发展和应用,物流的运营范围被不断扩展,但面对日益激烈的市场竞争,市场主体分散、实力悬殊、运营效率不高以及综合成本居高不下等困境使得物流行业的转型与升级成为发展的必然趋势和要求[2].经济全球化推进了企业物流活动由“大而全,小而全”的传统自营物流模式转向外协物流模式,推动物流行业的资源整合与协同发展,是当下关注的热点问题之一[3].特别对于那些季节性物流需求波动明显的产业,如煤炭、鲜疏、海产品和粮食等,每到产品生产和需求旺季的时候,经常会由于物流资源的短缺导致产品堆积或浪费.而与此同时,很多物流企业却因为没有足够信息和机遇,造成大量物流资源闲置.实现物流行业内的重组或兼并,无非是一种有效的方法,但受到市场环境复杂多变、企业结构性差异大等多方因素影响,实现重组或兼并的难度极大,因此虚拟集团或联盟化运营成为一条简单又高效的途径.近些年,众多企业为了满足顾客对综合物流服务的要求,实现优势互补、合作共赢和提升自身的市场竞争力,迎合动态变化的市场需求,充分利用市场的机遇和各种资源,纷纷开始以动态物流联盟或物流外包的形式对市场物流资源进行整合[4],使得联盟内部资源得到优化利用的同时,也提高了企业对市场机遇的捕捉能力,物流服务水平和服务质量也得到了前所未有的提升,企业整体运营成本得到有效控制[5-6].但由于动态物流联盟是多个独立企业以股权参与或契约的形式为完成某项任务而组建的临时性组织,该组织存在者明显的松散性和阶段性的特点,缺乏全面的制度约束,致使联盟大多中途解散[7],这不但令最初组建动态联盟的目的很难达到,一定程度上也影响了盟员企业的正常发展规划,进而产生了额外的成本和损失.因此,合理的动态物流联盟组建与管理机制是保证联盟成功合作及持续发展的关键.
国内外众学者针对此类问题从不同的角度进行了分析和研究.关于供应链上与3PL组建物流联盟的必要性分析方面,Mortensen等[8]和Jayaram等[9]通过研究发现,将SCM(supply chain management)与3PL进行整合具有极大的必要性,并突出强调信息交互技术在实现资源整合与运营管理中的重要作用,但研究中没有对各方的行为和偏好要素进行考虑,决策过程不能实现群体协调与互动,影响了联盟方案优化水平.张源凯等[10]认为在一地多仓环境下要将企业的订单分配与物流配送两个环节进行联合优化,与物流供应商进行联盟运营是一个比较理性的选择,但关键问题在于如何建立联盟;Büyüközkan等[11]认为大多数企业已经意识到与物流伙伴进行合作是提升自身客户服务水平和促进企业快速发展的关键所在,但由于存在很多的复杂与不确定因素,一直困惑于如何选择到合适的物流合作伙伴.关于物流联盟的构建方法的研究方面,Aguezzoul[12]综合论述了在实现物流外包或物流联盟组建中,对3PL的选择准则和方法,通过分析可以看出,相关研究中均缺少各方就联盟组建或物流外包等问题的动态协商与协调,仅从联盟盟主或外包企业一方来考虑,而现实市场中是必须要考虑市场动态性和决策各方的偏好与对关键议题的接受区间的;Hamdan等[13]和Liu等[14]对3PL的服务水平和运营效率等的分析与评价进行了系统的研究和文献分析,为本研究物流联盟组建时的伙伴选择决策提供了参考;Büyüközkan等[11]利用模糊层次分析法(fuzzy analytical hierarchy process,FAHP)提出了基于电子物流的战略联盟伙伴多属性评价模型,实现了对备选联盟物流伙伴的综合评价,但研究中的联盟伙伴的评价与选择过程,是完全基于盟主企业一方的静态分析与决策的,并不能体现出联盟各方的综合意愿,经常会因为决策的片面性丧失潜在的合作机会;Ying和Dayong[15]借助多agent技术构建了电子商务环境下3PL动态整合供应链中资源的自动协商框架,可以在有效降低供应链运营成本的同时,提高供应链的运营效率,但研究是建立在3PL本来就是供应链合作成员的假设基础上的,而且3PL可以掌握充分的决策信息,而现实中这种假设有些过于强烈,3PL很难获得决策所需的信息.本文中自动协商是指网络环境下,基于agent技术实现的多方协商机制,用来支持多agent决策、分歧管理和引导成员达成最优协议的方法之一[16-17].在自动协商中,一个agent可以同时参加多个具有不同协商协议的自动协商过程,协商协议即为基于agent类型和有效行动设定的交互规则集合[18-19].另外,Rief和Van Dinther[20]基于逆向最后通牒博弈(reverse ultimatum game,RUG)理论研究了供应链上供应商与零售商间合作协商问题,充分利用了多agent协商理论来实现供应链上企业的协作. Robu等人给出了一个基于电子市场环境的多agent分布式物流负载分配平台,可以实现人和agent间的信息交互,提供决策的必要信息,有效提高了对已有物流资源的利用效率和质量[21],但研究中缺乏对各参与个体的决策活动分析,而且平台内各方决策缺乏深入的信息沟通,缺少必要的协作意愿交互与确认,不利于形成最佳的共赢方案.
本文以动态物流联盟盟员(即动态物流联盟的成员企业)的视角,基于自动协商理论提出了动态物流联盟组建的自动协商模型,着重探讨当出现市场机遇或任务需求时,盟主企业和潜在盟员企业如何通过协商进行动态物流联盟的组建,并确定相应的合作方案.根据特定的市场环境和需求,本文对模型进行描述和假设,在考虑各方风险水平和协商空间的基础上,以联盟内部物流运输单价和运输中风险承担比例为主要议题开展协商,目的在于确定最佳联盟合作方案.为提高协商的效率和保证协商方案的有效性与合理性,本文引入了可信代理(confidential agent,CA)的概念和效用线性评价模型[22]实现对协商过程的控制和对报价带来效用的评估.
1 协商框架设计与模型描述动态物流联盟组建的基础在于可以实现联盟内部资源的优势互补,并可以让盟员企业竞争实力得以提升或获得更多的收益.联盟的收益分配情况和风险分担比率要根据盟员的实际业务情况进行确定,并在联盟组建初期确定相应的标准.由于所有潜在盟员企业(包括盟主企业)对于合作中涉及的不同条款都会存在一个接受空间,即存在最佳期望值和底线接受值,为了寻求合作机会,各方只有通过有效的协商方式来寻求最佳的合作方案,进而实现社会效用的最大化.动态物流联盟一般需要由多个独立企业组成,且每个企业都是理性决策实体,具有不同的风险偏好水平和协商议价能力.假设现实中存在一个可信的权威第三方组织,负责协商平台的构建、协商发起和协商过程控制等.盟主企业需要具有一定的企业规模或市场影响力.实现物流联盟的主要目的是对联盟内部所有企业的物流资源进行优化,实现联盟总体收益的提升,物流资源包括物流信息、物流设备或物流运输任务等.为构建物流联盟,盟主需借助自动协商平台与潜在物流联盟合作伙伴进行协商来确定联盟组建细节.
1.1 协商框架设计CA为可信的权威第三方组织在协商平台中实例化后的agent.协商开始前,CA首先要对协商环境相关的参数进行设定,其中包括协商最大轮次、协商方收益差的阈值θ和协商终止条件等.然后CA向每个协商方发出协商开始的确认信息.当收到来自CA的协商开始确认信息后,盟主和盟员企业分别初始化本方agent,并对协商策略和议题协商空间、风险水平等参数进行设定,并将形成的报价信息由agent提交给CA. CA对各协商方提交的信息进行确认后,对协商建议合作方案进行计算,并将求得的方案发送给各协商方.盟主和盟员企业会依据本方评估函数对CA的建议方案进行评估,并根据参数和协商策略的设定选择相应的决策.如果任意一方选择退出协商,协商破裂并终止;如果协商各方均接受CA所提的协商建议方案,协商成功并终止;如果任意一方选择修改协商参数,并进行下一轮协商,则CA收到新的协商信息后,进行新的协商方案计算,并重新反馈给协商各方,直到达到协商终止条件.具体协商框架如图 1所示.

|
| 图 1 动态物流联盟组建自动协商框架 Figure 1 The framework of automated negotiation for dynamic logistics alliance building |
现实中,可能会存在多个3PL企业希望与盟主企业构建联盟,盟主企业可以采用逐个协商的方式选定最佳的至少一个3PL企业作为联盟成员,或利用多属性评价函数对多个3PL企业的基本信息进行评价打分后,选定打分最高的3PL企业作为协商对象进行联盟组建协商.而当存在多个盟主企业打算构建联盟时,3PL企业则同样可以采用逐个协商或评价打分的方式选定合适的盟主联盟进行协商.为了研究方便,本文仅对某一潜在物流联盟盟员企业与物流联盟盟主企业为了构建物流联盟的协商进行研究.物流联盟组建由发起和选择联盟的盟员企业,可以为物流企业或生产企业,组建联盟的目的在于拥有物流运输任务,但又无法独立完成.动态物流联盟的成员企业一般为专业的物流企业或掌握有充足物流运输资源,但没有实现对已有物流资源充分利用的生产企业.合作各方均为独立决策,具有足够的市场形势分析和相关信息获取能力,具有稳定的协商能力,可以有不同的风险偏好水平和协商议价能力,可以根据经验数据获得需要承担任务的单位基本运输成本.自然环境会对运输成本造成影响,并且是可以根据历史数据进行预测的.针对不同的运输任务,联盟各方均接受行业内普遍认可的货损率等相关指标.动态物流联盟的社会效用与联盟成员间的具体合作方案直接相关,联盟各方均期望在保证本方收益的情况下,使联盟的社会效用最大化.
1.2 协商模型描述根据动态物流联盟构建的特征和自动协商的框架结构与基本要素组成,可将自动协商模型定义为

|
(1) |
其中,I={I1,I2,…,Ii,…,In}为合作方案中n个协商议题取值集合. F代表协商选用的协商协议,本研究选用与文[22]相同的协商协议,即协商各方将相关协商信息报给CA,CA负责寻找约束条件下的最佳合作方案,并将建议反馈给各方,各方依据自身情况,选择接受方案、修改协商报价或退出协商,只有全部协商方均接受了CA的建议的合作方案后,协商宣告成功. L=(Sl,δl,Ul,ωl)和M=(Sm,δm,Um)分别代表盟主和盟员企业的agent.其中的l和m分别表示该属性属于agent L或M;Sl={sl1,sl2,…,sli,…,sln}和Sm={sm1,sm2,…,smi,…,smn}分别代表L和M方对n个议题的协商空间集合,对于任意议题Ii均存在协商空间向量:sli=(sli,sli)和smi=(smi,smi),其中,sli和smi分别代表L和M对第i个议题可接受的底线值,sli和smi分别代表L和M对第i个议题期望得到的理想值. δl和δm分别代表L和M的风险水平系数,且取值满足δl>0和δm>0,当取值小于1时,表示该企业为风险追求型,它会通过降低对风险的重视程度来争取获取更好收益;当取值等于1时,表示该企业为风险中立型;当取值大于1时,表示该企业为风险厌恶型,它期望比较保守地估计收益,特别重视风险波动对收益造成的影响. Ul和Um分别代表L和M的效用评价函数,具体定义如1.3节所示. ωl=(ωl1,ωl2,…,ωli,…,ωln)为L在协商过程中对合作方案中各议题进行满意度评价时的权重向量,且存在0≤ωli≤1(∀i=1,…,n)和
|
(2) |
现实中,企业与3PL间为了构建动态联盟,往往会针对合作过程中的诸多议题进行协商,目的是为了明确物流任务完成过程中的收益和风险分担关系.为了具体化评价函数的含义,假定L有从甲地到乙地的任务量为Q(吨)的运输任务无法自己完成,需要选择合适的盟员完成,运输期限为T天,所运输物品的每吨销售价格为p(元),ξ(元/吨)为L实际可支付给M的单位运价,γ(\%)为M在任务完成过程中需要承担的风险比率,c为正常条件下M将货物从甲地运往乙地的基本运输成本(元/吨),ϕ∈(0,1]为每天的运输成本影响因子,即由于天气或特殊自然条件导致的运输成本异动因子,其取值为运输企业根据历史同期数据进行预测得来,并可以作为决策的依据,Φ为运输期T内的运输成本影响因子集合,ϕ∈Φ,t=1,2,…,T;η∈(0,1]为全部待运物资可能产生的损失比率,即正常运输成本以外可能发生的意外损失的费用,其取值一般根据行业历史经验数据获得,并可以在L和M间达成共识.为了简化协商过程,本文假定L和M主要对合作中L实际可支付给M的单位运价ξ和M在任务完成过程中需要承担的风险比率γ进行协商,即协商议题集合为I={Iξ,Iγ},但不失一般性,所设计的协商模型仍然符合多议题协商的特征,如果有更多议题需要进行协商,则仅需对评价函数部分进行相应调整即可.协商开始后,L和M会根据自己协商空间和风险水平对Iξ和Iγ的取值进行协商,确定最终的合作方案. slξ和slξ分别代表L对单位运价Iξ的底线值和期望得到的理想值,且协商中对议题Iξ的取值需满足slξ≤Iξ≤slξ的约束,当L有物流运输任务需要借助联盟伙伴完成时,slξ是L能支付的最大单位运输费用,slξ·Q为L用于完成此运输任务的最大费用.当Iξ=slξ时,L的任务完成收益为零,即L没有从此次任务中获取收益,仅达到了完成运输任务的目的;如果Iξ>slξ,L的收益将为负值,即L不但没有从运输任务中获得收益,反而需要在计划外支付费用,这是不能被接受的;smξ和smξ分别代表盟员企业M对单位运价Iξ的底线值和期望得到的理想值,且存在smξ≤Iξ≤smξ. slγ和slγ分别代表L对M承担的风险比率Iγ的底线值和理想值,slγ,slγ∈[0, 1],且需保证协商中对议题Iγ的取值满足约束slγ≤Iγ≤slγ;smλ和smγ分别代表M对本方承担的风险比率Iγ的底线值和理想值,smλ,smγ∈[0, 1],且需保证协商中对议题Iγ的取值满足约束smγ≤Iγ≤smγ.当Iγ=1时,表示M需要承担全部物流风险,当Iγ=0时,表示L需要承担全部物流风险.当且仅当协商双方对全部议题均有公共协商空间时,双方才有进行协商的可能,即[slξ,slξ]∩[smξ,smξ]≠Ø,且[slγ,slγ]∩[smλ,smλ]≠Ø.
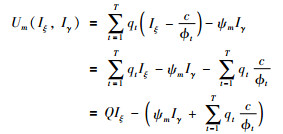
协商中,M主要考虑实现联盟后,本方可获得的收益和承担的风险情况,在保证实现合作的基础上,M的报价和协商策略选择的目的在于使本方收益最大化(注:在个别情况下,M为了组建联盟,获得长期合作机会,可能会出现在零收益的情况下接受任务),令ψm=(ηpQ)δm表示M对完成运输任务全部风险的评估值,则M的收益效用评价函数Um(Iξ,Iγ)可表示为
|
(3) |
其中,qt为根据运输任务的具体完成情况确定的每天需要完成的运输量,


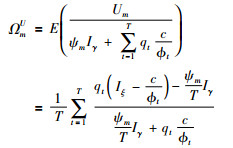
为了让M能够有效把握协商的状态和科学评估来自于CA的协商建议方案的合理性,M需要在协商中对协商方案在实际运营中收益水平和风险进行度量,进而选择合适的协商决策,测度方法如下所示[23-24].受到任务期内运输成本影响因子集合Φ的干扰,M获得收益的情况可以利用利润与成本比的数学期望来度量,具体运营收益测度模型可表示为
|
(4) |
其中,ΩmU代表通过收益测度评价函数E()[23]求解得到的M对协商建议方案实际运营中收益测度评价值.
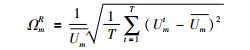
M对协商建议方案运营风险测度评价可近似表示为利润标准差与利润均值的比率[24]:
|
(5) |
其中,ΩmR为M对协商建议方案实际运营中的风险测度评价值,
协商中,L在确保找到合适的盟员企业的基础上,追求本方收益的最大化,令ψl=(ηpQ)δn表示L对完成运输任务全部风险的评估值,其收益效用评价函数Ul为

|
(6) |
由于L并非物流任务的实际完成方,所以不需要去考虑运输成本的问题,只需考虑本方的收益率即可,由于slξ*Q即为L可用于完成物流任务的全部可支付费用.
2 协商中的决策活动分析对协商中各方行为的正确把握是协商效率和成功率的必要保障,本文根据动态物流联盟组建需要,基于所提出自动协商框架,对不同情境下的协商方决策活动进行分析.
2.1 协商方决策活动在动态物流联盟组建的协商过程中,受到动态物流联盟的多阶段性、灵活性、组织开放性和不存在明确的产权关系等特点的影响,协商各方的报价和决策活动会明显受到合作延续性和市场环境因素的干扰.
1) 一次性合作协商方决策活动分析.在一次性合作的动态物流联盟组建中,由于协商各方都确定本次合作会随着联盟运输任务的完成而结束,不存在长期或后续合作的可能,那么协商双方的报价和协商策略选择都会更多地关注本方的利益,并且不愿承担任务完成过程中的风险.联盟的利益分配和风险承担遵循相对优势原则[7].
2) 多次重复合作协商方决策活动分析.在多次重复合作的动态物流联盟组建中,协商各方可以是以前曾经有过合作基础,或协商各方都明确知道本次合作的顺利完成,会成为未来长期合作的基础.因此,在协商中,协商各方往往选择比较保守的协商策略,更加注重合作关系的确立,愿意让出本方一部分利益的同时,为了实现长期合作,会主动承担一定任务完成过程中的风险.但联盟双方相对优势差异过大时,会引发更大的利益冲突,结果导致联盟关系不易建立[8].
2.2协商过程中的各方协商策略分析
在协商开始前,盟主和盟员企业都需要设定好本方agent L和M的协商和让步策略,决策要结合本方对协商状态把握和对来自于CA的协商建议方案的评估.
2.2.1 M的协商和让步策略分析协商中,M收益测度ΩmU的阈值ΩmU和ΩmU分别代表M可接受的最差收益测度值和期望获得的理想收益测度值,且存在ΩmU≤ΩmU. M风险测度ΩmR的阈值ΩmR和ΩmR分别代表M可接受的最差风险测度值的上限和期望达到的理想风险测度值,且存在ΩmR≤ΩmR.根据对CA协商建议方案的评估,M可能面对的决策条件如图 2所示.

|
| 图 2 M可能面对的决策条件 Figure 2 The possible decision conditions of M |
根据协商方的决策活动分析可知,不同的合作延续性和物流环境因素会导致M选择不同的协商策略.当协商目的是一次性合作时,M只有在满足条件①时会选择接受建议方案或进行让步;当满足条件②和④时会选择调整自己的报价;满足其余协商决策条件时,M均会选择退出协商,放弃与L的合作可能.
当协商可能会带来多次重复合作,或前期双方已有多次较好的合作,未来还有合作的可能时,在满足协商决策条件①、②或④时,M都会选择直接接受建议方案(对方接受了建议方案)或根据潜在收益率进行让步(对方选择进入下一步);当满足条件③或⑦时,M会根据对方的决策选择相应的决策,若L选择了接受建议方案,则M会根据自身的风险偏好选择提升相应议题的报价水平,若L选择进入下一轮协商,则M会根据自身的风险水平和潜在收益率选择对议题进行均衡调节,即在提升协商建议方案中不理想议题报价水平的同时,适当让步其他议题的报价;当满足条件⑤时,若对方接受,则M选择接受,否则M选择退出协商;当满足条件⑥、⑧或⑨时,M会选择退出协商.
本研究假设协商各方存在历史合作经历或未来有多次合作的可能,即协商的目的是多次重复合作. smξ和smξ是M对议题Iξ的理想值和底线值,smγ和smγ是M对议题Iγ的理想值和底线值.令



1) 当满足条件①、②或④,但对方选择进入下一轮协商时,报价调整策略为:
满足条件①时:
满足条件②时:
满足条件④时:
2) 当满足条件③或⑦,而对方选择了接受协商建议方案时,报价调整策略:
满足条件③时:
满足条件⑦时:
3) 当满足条件③或⑦,而对方选择了进入下一轮协商时,报价调整策略:
满足条件③时:
满足条件⑦时:
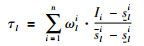
协商过程中,L会基于本方的协商范围对CA给出的协商建议合作方案的满意度进行评价,并基于评价值和相应的决策阈值选择协商决策,L对CA给出协商建议方案的满意度评价方法可以表示为[22]
|
(7) |
其中,τl为L对协商中获得的协商建议方案的满意度评价值;Iξ和Iγ代表CA的协商建议方案中对运输价格ξ和M的运输风险承担比率γ给出的建议值;ωlξ和ωlξ分别代表L在进行满意度评价时对议题Iξ和Iγ的权重.本研究中L的协商决策仅包括接受建议方案、进入下一轮协商和退出协商三种,不对其报价调整进行进一步分析. L的对协商建议方案的满意度评价值τl的阈值,τl和τl分别代表L可接受的最差满意度和理想满意度,当τl≥τl时,L选择接受建议方案;当τl≤τl时,L选择退出协商;当τl < τl < τl时,L选择保持原有报价,进入下一轮协商,并等待CA给出新的协商合作方案,直到τl≥τl、τl≤τl或达到其他终止条件,退出自动协商.
2.3 协商合作方案优化求解模型为了在促成双方成功达成合作的基础上,实现社会收益的最大化,CA需要在综合考虑双方各自实际可获得的协商收益的同时,基于他们在协商过程中的动态信息寻找最佳合作方案.根据前文对针对盟主企业L和盟员企业M在协商过程中的效用评价函数,为了实现社会效用最大化的同时,保证协商合作方案的公平性[25],CA协商合作方案优化求解模型可表示为

|
(8) |
|
(9) |

|
(10) |

|
(11) |
其中,式(8)为目标函数,追求社会效用(即联合收益)U的最大化,式中只有Iξ和Iγ为需要通过协商决策变量,分别代表L实际可支付给M的单位运价和M在任务完成过程中需要承担的风险比率,其余均为已知或可预估已知量,Um和Ul分别代表L方和M在协商中获得的收益;式(9)为协商建议方案的公平性约束,即保证各方获得收益小于一个给定域值θ,θ为协商开始前由CA确定,且协商双方均接受的一个相对较小的值;式(10)和(11)为协商中议题Iγ和Iξ的取值范围约束,而且取值范围会随着协商的进行而动态的调整,其中vξ和vξ分别代表议题Iξ取值的上限和下限,vξ=min(
以某大型煤炭企业甲在某年第一季度与某发电供热公司乙的煤炭销售活动为例,与后者签订的销售合同总量为5 000吨,单位发热量为6 300~6 400大卡,挥发14,硫1.8,水8的煤炭,销售单价为280元/吨,需要由企业甲负责煤炭的运输,并在45天内完成全部运输任务.由于该合同运输只能采用公路运输,且企业甲受到煤炭季节性需求的影响,运输能力明显不足,无法完成该合同中的煤炭运输任务.为了保证销售合同的顺利完成,企业甲决定与临近的一家具有该运输能力的煤炭物流企业丙进行商讨构建动态物流联盟,由煤炭物流企业丙负责完该煤炭运输任务,为了获得长期合作可能,煤炭物流企业丙非常迫切获得这次合作的机会,双方协商的主要议题包括:由煤炭企业甲到发电供热公司乙的煤炭单位运价ξ(元/吨)和煤炭物流企业丙需承担物流风险比率γ(\%).协商中,L为煤炭企业甲方的agent,M为煤炭物流企业丙方的agent.协商开始前,煤炭企业甲和煤炭物流企业丙对各自的agent进行初始化.为了提高数值仿真实验对本文所提模型的合理性验证水平,仿真试验中通过随机的方式在合理区间内产生L和M对议题协商的理想值和底线值,一般情况下设定L对运输价格期望值随机产生空间的最小值边界值即为运输任务完成的基本成本值,即协商合作方案不能再低于这个值了,而对于M对运输价格期望值随机产生空间的最大值边界值即为物流外包方能够接受的上限值,协商过程中也不能超过这个值;对于运输风险分担比率值的随机产生空间设定则按照风险共担,和最小化本方承担比例但为了获得理想价格而适当承担运输风险的原则进行设定,L和M对各议题的协商空间期望和底线值的随机区间如表 1和表 2所示.
| 议题 | 理想值 | 底线值 |
| Iξ | 120≤slξ≤150 | [slξ+60,slξ+80] |
| Iγ | 0.7≤slγ≤0.9 | [slγ-0.5,slγ-0.3] |
| 议题 | 理想值 | 底线值 |
| Iξ | 200≤smξ≤230 | [smξ-80,smξ-60] |
| Iγ | 0.2≤smγ≤0.4 | [smγ+0.3,smγ+0.5] |
仿真中,L和M对协商中其它相关参数的设定也采用随机的方式给出,具体如表 3、4所示.
| 参数 | 含义 | 随机区间 |
| δl | 风险水平 | [0.60,0.80] |
| τl | 接受方案的收益率值 | [0.75,0.85] |
| τl | 退出协商的收益率值 | [0.35,0.45] |
| 参数 | 含义 | 随机区间 |
| δm | 风险水平 | [0.15,0.30] |
| ΩmU | 理想收益测度值 | [0.40,0.45] |
| ΩmU | 可接受的收益测度值下限 | [0.15,0.25] |
| ΩmU | 理想风险测度值 | [0.10,0.13] |
| ΩmU | 可接受的风险测度值下限 | [0.15,0.20] |
协商中对L的满意度评价权重向量ωl=(ωlξ,ωlγ)采用随机方式给出,且需要满足0≤ωlξ≤1,0≤ωlγ≤1和ωlξ+ωlγ=1.同时,为了增加仿真实验的现实应用性和环境适应能力,本研究根据历史相关运输数据设定了单位运输成本c和货损率η的随机取值范围(c∈[90,105],η∈[0.03,0.15])的同时,煤炭物流企业丙对近3年第一季度由煤炭企业甲至发电公司乙的公路运输条件平均情况进行了统计,具体情况如表 5所示.
| 月份 | 当月各天的运输条件 |
| 1 | 1121223221112233432111121133244 |
| 2 | 1143221122112221122311112241 |
| 3 | 2134422111211311142221121132111 |
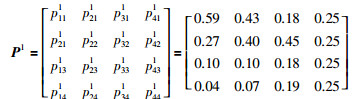
其中,数字1、2、3和4分别代表运输条件为优秀(ϕ(1)=1.0)、良好(ϕ(2)=0.8)、一般(ϕ(3)=0.6)和差(ϕ(4)=0.4).通过对90个条件数据的分析,可近似得到一步马尔可夫链转移矩阵[26]为
|
(12) |
运输期内每天运输影响因子的求解方法为

|
(13) |
其中,ϕt为第t天的运输影响因子;i=1,2,3,4代表 4种不同的运输条件,ϕ(i)为不同运输条件下的运输影响因子的值;ρk0表示运输条件为k(取值为1,2,3或4)的初始状态概率,可以根据经验或借助媒体预报直接获得,ρit(t>0)代表第t天运输条件为i的概率,可以通过式(13)中的递归等式进行求解;pkit为第t天由任意运输条件k(取值为1,2,3或4)转变为运输条件i的概率,当t=1时,可通过式(12)获得相应取值,当t>1时,可在式(12)基础上,借助马尔可夫多步转移理论进行求解,Pt=Pt-1·P1,t>1.
3.2 协商过程及分析 3.2.1 相关参数设定单位运输成本c=94.402(元/吨)、货损率η=0.117.根据对相关数据的分析,运输条件变化的初始状态概率向量:ρ0=(0.43,0.29,0.18,0.10),借助式(12)和式(13)可以得到运输期内的环境影响因子集合.另外,CA的参数设定包括:最大协商轮次为10轮;各协商方间的收益差别阈值θ=0.01;协商终止条件为:任一方退出协商/双方均接受建议方案/达到最大协商轮次.
3.2.2 协商过程分析煤炭物流联盟的盟主企业甲和3PL企业丙进入协商平台后,首先要对本方agent进行初始化,即分别设定agent L和M的协商参数(具体如表 6所示).各方完成对agent的初始化后,协商开始.
| 参数 | 取值 | 参数 | 取值 |
| δm | 0.221 | δl | 0.742 |
| (smξ,smξ) | (130,204) | (slξ,slξ) | (209,134) |
| (smγ,smγ) | (0.546,0.238) | (slγ,slγ) | (0.532,0.832) |
| [ΩmU,ΩmU] | [0.237,0.419] | [τl,τl] | [0.365,0.778] |
| [ΩmR,ΩmR] | [0.174,0.110] | (ωlξ,ωlγ) | (0.602,0.398) |
通过数值仿真,L和M经过5轮协商后达成最终合作,具体合作方案为:Iξ=161.579和Iγ=0.832,L最终协商收益235 862.641元,M最终协商收益240 627.543元,总社会效用476 490.184元.协商过程中的议题值与各方满意度和收益的具体变化情况如图 3~5所示.

|
| 图 3 协商过程中CA的合作建议中议题取值变化情况 Figure 3 The changing of issue values in the proposal of CA during negotiation |

|
| 图 4 协商过程中L和M对协商状态评估值变化情况 Figure 4 The changing of evaluation values of L and M for negotiation state during negotiation |

|
| 图 5 协商中各方收益变化情况 Figure 5 The changing of profits of each negotiation party during negotiation |
为了实现煤炭物流联盟的有效且双赢的合作,煤炭物流联盟的盟主企业甲和3PL企业丙在协商平台上借助本方agent L和M进行了协商.协商过程中,L和M根据参数和协商策略的设定,自动完成了合作方案评估、协商决策选择和报价让步等工作.从图 3可以看出,为了促成合作,M对协商空间的让步使得本方的风险承担比率Iγ值不断升高(如图 3(a)所示),单位运输价格Iξ略有增加(如图 3(b)所示),验证了M让步策略的有效性.
虽然M对议题协商空间的让步使自身的风险承担比率Iγ不断增加,而单位运输价格Iξ增加幅度很小(如图 3所示),但从图 4中可以看出,这种让步对M的收益测度和收益风险测度评估值得影响非常微小(如图 4(a)和(b)所示),但却使L对合作方案的满意度快速提升(如图 4(c)所示).而且,通过如图 5可以看出,M的适当让步,让L在协商中获得的实际收益不断提高(如图 5(a)所示),促成了其协商决策的变化,最终接受了CA的协商建议方案.与此同时,从图 5(b)可以发现M的让步并没有使自身获得收益降低,反而也得到明显提高,M在协商中的让步有效促进了合作双方的共赢,使得社会效用(即L和M的联合收益)随着协商的进行不断提高(如图 5(c)所示).
通过以上的数值实验分析不难发现,协商是一种促成合作和实现双赢的有效手段,借助自动协商技术,不但可以有效提高协商的效率,也能够更高效地找到最佳的协商合作方案.同时,协商中各方的适当让步不但能有效提高实现合作的可能性,还有利于社会效用的增加,这是符合经济社会实际的.最终协商合作方案的确定,可以有效促成煤炭物流联盟的盟主企业甲和3PL企业丙联盟合作的达成,也减少了双方在合作过程中的分歧,提高了煤炭物流联盟合作的稳定性.
4 结论与展望面对日趋复杂和多变的市场环境,实现企业间物流虚拟集团化或联盟运营是降低企业运营成本、提高物流服务水平和市场竞争力的有效途径,也是应对季节性物流需求波动的必要措施.本文基于自动协商理论对动态物流联盟组建的自动协商模型进行研究,在充分考虑了动态物流联盟组建中的环境和各方的风险偏好与决策活动等因素对协商方案的影响的基础上,以联盟盟员的视角设计和完善了协商的流程与让步策略.通过煤炭动态物流联盟组建为例的数值仿真实验可以看出,本文所提模型和方法可以有效处理联盟组件中的合作协商问题.为了保证合作方案的公平性,研究中建议合作方案给各方带来收益差进行了约束,设定了限定阈值,在实际应用中可以根据具体环境需要对其进行适当调整.同时,为了反映环境对运输成本的影响,本文选用离散随机过程对运输期内的成本影响因子进行了刻画,有效提高了研究内容的现实应用价值.但由于离散随机过程自身的缺陷,在某些特殊情况下并不能有效反应客观环境的变化实际,因此,后续研究中将尝试引入更加完善的历史或经验数据分析与预测方法,如引入隐马可夫链模型对历史数据进行处理,以期获得更为科学的环境变化预测数据.同时,为了提高协商参与方决策的环境适应水平,未来研究还将针对市场环境波动信息对协商决策的影响进行系统研究.
| [1] | Wang G, Gunasekaran A, Ngai E W T, et al. Big data analytics in logistics and supply chain management:Certain investigations for research and applications[J]. International Journal of Production Economics, 2016, 176: 98–110. DOI:10.1016/j.ijpe.2016.03.014 |
| [2] | Marasco A. Third-party logistics:A literature review[J]. International Journal of Production Economics, 2008, 113(1): 127–147. DOI:10.1016/j.ijpe.2007.05.017 |
| [3] |
徒君, 黄敏, 薄桂华.
第四方物流研究综述[J]. 系统工程, 2013, 12: 53–59.
Tu J, Huang M, Bo G H. A review of research on fourth party logistics[J]. Systems Engineering, 2013, 12: 53–59. |
| [4] |
徒君, 黄敏.
基于契约设计的第四方物流质量风险管理[J]. 信息与控制, 2014, 43(3): 276–281.
Tu J, Huang M. Contract design based quality risk management for fourth party logistics[J]. Information and Control, 2014, 43(3): 276–281. |
| [5] | Chen F, Wang H, Xie Y, et al. An ACO-based online routing method for multiple order pickers with congestion consideration in warehouse[J]. Journal of Intelligent Manufacturing, 2016, 27(2): 389–408. DOI:10.1007/s10845-014-0871-1 |
| [6] | Chen F, Wang H, Qi C, et al. An ant colony optimization routing algorithm for two order pickers with congestion consideration[J]. Computers & Industrial Engineering, 2013, 66(1): 77–85. |
| [7] |
丁绒, 孙延明.
基于触发策略的企业动态联盟利益分配博弈[J]. 系统工程, 2013, 10: 55–61.
Ding R, Sun Y M. Profit allocation game in dynamic alliances based on the trigger strategy[J]. Systems Engineering, 2013, 10: 55–61. |
| [8] | Mortensen O, Lemoine O W. Integration between manufacturers and third party logistics providers?[J]. International Journal of Operations & Production Management, 2008, 28(4): 331–359. |
| [9] | Jayaram J, Tan K C. Supply chain integration with third-party logistics providers[J]. International Journal of Production Economics, 2010, 125(2): 262–271. DOI:10.1016/j.ijpe.2010.02.014 |
| [10] |
张源凯, 黄敏芳, 胡祥培.
网上超市订单分配与物流配送联合优化方法[J]. 系统工程学报, 2015, 2: 251–258.
Zhang Y K, Huang M F, Hu X P. Integrated optimization approach to order allocation and delivery problem of online supermarket[J]. Systems Engineering and Electronics, 2015, 2: 251–258. |
| [11] | Büyüközkan G, Feyzioĝǧlu O, Nebol E. Selection of the strategic alliance partner in logistics value chain[J]. International Journal of Production Economics, 2008, 113(1): 148–158. DOI:10.1016/j.ijpe.2007.01.016 |
| [12] | Aguezzoul A. Third-party logistics selection problem:A literature review on criteria and methods[J]. Omega, 2014, 49: 69–78. DOI:10.1016/j.omega.2014.05.009 |
| [13] | Hamdan A, Rogers K J J. Evaluating the efficiency of 3PL logistics operations[J]. International Journal of Production Economics, 2008, 113(1): 235–244. DOI:10.1016/j.ijpe.2007.05.019 |
| [14] | Liu C L, Lyons A C. An analysis of third-party logistics performance and service provision[J]. Transportation Research Part E:Logistics and Transportation Review, 2011, 47(4): 547–570. DOI:10.1016/j.tre.2010.11.012 |
| [15] | Ying W, Dayong S. Multi-agent framework for third party logistics in E-commerce[J]. Expert Systems with Applications, 2005, 29(2): 431–436. DOI:10.1016/j.eswa.2005.04.039 |
| [16] | Beam C, Segev A. Automated negotiations:A survey of the state of the art[J]. Wirtschaftsinformatik, 1997, 39(3): 263–268. |
| [17] | Jennings N R, Faratin P, Lomuscio A R, et al. Automated negotiation:Prospects, methods and challenges[J]. Group Decision and Negotiation, 2001, 10(2): 199–215. DOI:10.1023/A:1008746126376 |
| [18] | Li M, Vo Q B, Kowalczyk R, et al. Automated negotiation in open and distributed environments[J]. Expert Systems with Applications, 2013, 40(15): 6195–6212. DOI:10.1016/j.eswa.2013.05.033 |
| [19] |
尚安利, 夏立.
基于多Agent的船舶电力系统故障恢复方法[J]. 信息与控制, 2015, 44(6): 759–768.
Shang A L, Xia L. Multi-agent-based service restoration approach for shipboard power system[J]. Information and Control, 2015, 44(6): 759–768. |
| [20] | Rief D, Van Dinther C. Negotiation for cooperation in logistics networks:An experimental study[J]. Group Decision and Negotiation, 2010, 19(3): 211–226. DOI:10.1007/s10726-010-9193-7 |
| [21] | Robu V, Noot H, La Poutré H, et al. A multi-agent platform for auction-based allocation of loads in transportation logistics[J]. Expert Systems with Applications, 2011, 38(4): 3483–3491. DOI:10.1016/j.eswa.2010.08.136 |
| [22] | Park S, Yang S B. An efficient multilateral negotiation system for pervasive computing environments[J]. Engineering Applications of Artificial Intelligence, 2008, 21(4): 633–643. DOI:10.1016/j.engappai.2007.07.005 |
| [23] |
杨道箭, 齐二石, 魏峰.
顾客策略行为与风险偏好下供应链利润分享[J]. 管理科学学报, 2011, 12: 50–59.
Yang D J, Qi E S, Wei F. Supply chain profit sharing under strategic customer behavior and risk preference[J]. Journal of Management Sciences in China, 2011, 12: 50–59. |
| [24] |
谭忠富, 于超, 姜海洋, 等.
煤炭供应商与发电商之间合约谈判风险收益平衡优化模型[J]. 系统工程理论与实践, 2011, 11: 2108–2114.
Tan Z F, Yu C, Jiang H Y, et al. Risk and benefit balance optimization models of contract negotiation between coal suppliers and power generators[J]. Systems Engineering-Theory & Practice, 2011, 11: 2108–2114. DOI:10.12011/1000-6788(2011)11-2108 |
| [25] | Liu Q, Zhang C, Zhu K, et al. Novel multi-objective resource allocation and activity scheduling for fourth party logistics[J]. Computers & Operations Research, 2014, 44: 42–51. |
| [26] | Hagen B, Simonsen I, Hofmann M, et al. A multivariate markov weather model for O & M simulation of offshore wind parks[J]. Energy Procedia, 2013, 35: 137–147. DOI:10.1016/j.egypro.2013.07.167 |