



0 引言
多变量时滞系统广泛存在于现代生产过程中,其解耦控制一直是控制界研究的热点,其中,对于输入变量与输出变量数目不相等的非方系统,例如某些化工蒸馏塔和Shell标准控制问题[1],其解耦控制方法较方形系统更为复杂,因此研究简便有效的解耦控制方法具有重要的意义.
非方系统传统的控制方法是通过添加或删除输入、输出变量使其转化为方形系统再进行解耦控制,但添加变量会增加控制成本,删除变量会降低控制品质.随着先进控制技术的发展,出现了多种针对非方系统的控制方法,尤其是内模控制得到了广泛的应用.文[1]提出了一种改进的内模控制方法,可单独整定各个回路的控制器参数,以调节对应回路的输出特性,而且反馈滤波器可明显改善系统的鲁棒稳定性.文[2]在文[1]的基础上提出了基于奇异值分解的内模控制方法,不仅使系统具有良好的解耦能力,而且新型滤波结构进一步增强了系统的鲁棒性.考虑到文[1-2]方法中系统广义逆求解的复杂性,文[3]基于标准化相对增益求解各个回路的等价传递函数,并通过等价传递函数与广义逆之间的转化关系获得内模控制器参数,有效简化了设计计算,但没有考虑大时滞特性对系统性能的影响.因此,文[4]针对时滞非方系统,将静态解耦与Smith预估控制相结合,有效地改善了系统的性能,但控制器参数的整定较为复杂.文[5]则利用内模控制方法设计了Smith预估控制器,不仅能够动态地补偿静态解耦的缺陷,还克服了模型近似和不确定性的影响.文[1-5]均为集中控制方法,所得控制器均为全矩阵控制器,往往会导致参数整定不易实现,某个回路控制器参数的改变,有可能使其它回路波动,导致系统稳定性变差.为此文[6]提出了分散控制的方法,根据系统输入输出关系求得各回路的有效开环传递函数,利用新型粒子群优化算法整定各回路的PID控制器参数.分散控制克服了集中控制的不足,但不能实现完全解耦,而且计算非常复杂.文[7]通过设计正向解耦矩阵实现系统的完全解耦,再针对解耦后的每个单回路系统分别设计控制器,但该方法需要对解耦后的系统模型进行降阶处理,从而导致模型失配.另外,以上方法的系统设定值跟随特性和干扰抑制特性均由同一个控制器调节,称为一自由度控制系统,不能很好地兼顾系统的设定值跟随特性和干扰抑制特性.二自由度控制通过设计设定值跟随控制器和干扰抑制控制器实现了两种性能的独立调节,可保证系统同时具有良好的设定值跟随特性和干扰抑制特性[8].
因此,本文针对多变量时滞非方系统,提出一种二自由度Smith预估控制方法,并考虑到方形系统反向解耦的优点[9],将其推广应用于非方系统,实现被控对象的完全解耦,并基于解耦后的广义被控对象,分别设计设定值跟随控制器和干扰抑制控制器.仿真结果表明了所提方法的有效性和优越性.
1 多变量系统的二自由度Smith预估控制结构非方多变量系统的二自由度Smith预估控制结构如图 1所示.其中,G(s)为被控对象,D(s)为反向解耦矩阵,Gp(s)为解耦后的广义被控对象,Gm(s)为被控对象的模型,Gm0(s)为Gp(s)的最小相位部分,Gc(s)为设定值跟随控制器,Q(s)为干扰抑制控制器,R(s)和Y(s)分别为给定输入和输出,d(s)为输入扰动.

|
| 图 1 二自由度Smith解耦控制器结构 Figure 1 Structure of two-degrees-of-freedom Smith decoupling controller |
根据图 1可得系统输出与设定值输入、扰动输入之间的关系分别为

|
(1) |

|
(2) |
若模型匹配,即Gp(s)=Gm(s),则
|
(3) |

|
(4) |
由上式可见系统的设定值跟随特性Gyr(s)只与Gc(s)有关,而干扰抑制特性Gyd(s)只与Q(s)有关,因此可以对Gyr(s)和Gyd(s)进行独立设计,使系统同时获得良好的设定值跟随特性和干扰抑制特性.
2 解耦矩阵与控制器的设计 2.1 反向解耦矩阵的设计多变量时滞非方系统的被控对象为
|
(5) |
式(5)中,n为输入变量个数,m为输出变量个数,若n < m,系统不稳定,因此只考虑n>m的系统.第j个输入到第i个输出的传递函数gij(s)为
|
(6) |
式中,Tij为时间常数,kij为增益,θij为时滞时间.
由图 1可知,解耦后的广义被控对象

|
(7) |
当被控对象完全解耦时,多变量系统为m个单变量系统.可取为
|
(8) |
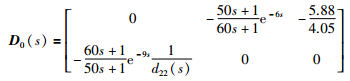
反向解耦结构如图 2所示,其中C(s)为设定值跟随控制器输出,U(s)为被控对象输入,Dd(s)为前向通道传递函数矩阵,D0(s)为反向通道传递函数矩阵.

|
| 图 2 反向解耦结构 Figure 2 Structure of inverted decoupling |
由图 2可得

|
(9) |
对式(9)两端求逆可得

|
(10) |
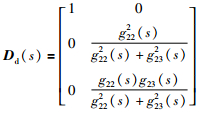
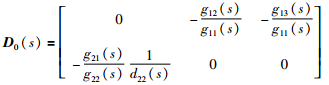
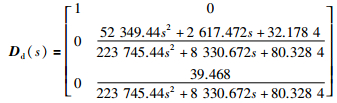
由图 1、2可知反向解耦前向通道传递函数Dd(s)的输出为被控对象输入,D0(s)则由Dd(s)的输出端反馈回输入端以实现多变量系统的解耦.因此Dd(s)仅含n个非零元素.根据式(8)和式(10)可设
|
(11) |
|
(12) |
以2×3系统为例,即被控对象G(s)含有3个输入变量和2个输出变量.
|
(13) |
由式(11)、式(12)可知
|
(14) |
|
(15) |
解耦后的广义被控对象为
|
(16) |
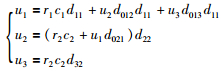
即为两个单变量系统,2×3非方系统反向解耦控制结构如图 3所示,其中ri(s)为回路给定输入,Cii(s)为设定值跟随控制器,ui(s)为被控对象的输入变量,yi(s)为回路输出变量.

|
| 图 3 2×3非方系统反向解耦控制结构 Figure 3 Inverted decoupling control structure for 2×3 non-square system |
根据图 3可知系统的输入输出关系为

|
(17) |
其中
|
(18) |
将式(18)代入式(17)并整理得

|
(19) |
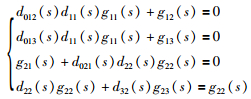
由式(16)可知,输出变量y1只跟输入变量r1有关,输出变量y2只跟输入变量r2有关,则式(19)应满足
|
(20) |
令gp11(s)=g11(s),gp22(s)=g22(s),则由式(10)和式(20)可得
|
(21) |
|
(22) |
为保证反向解耦方法的可实现性,被控对象时滞时间必须满足
|
(23) |
否则应在被控对象前添加一个3×3对角矩阵N(s)构成新的被控对象Gn(s)=G(s)N(s)[10].
|
(24) |
式中,e-δis为被控对象G(s)第i行的时滞补偿项.
对于m×n时滞非方系统,根据式(11)和式(12),再通过分析输入输出间的关系即可求得解耦矩阵D(s),因此计算比较简单,且解耦后的单回路系统为一阶加时滞的形式,便于直接进行控制器的设计.
2.2 跟随控制器的设计由式(3)可知被控对象的设定值跟随特性Gyr(s)的分母中已经不包含时滞环节,则设定值跟随控制器按常规的Smith预估控制法整定.根据Dahlin算法的思想[11],取各回路期望的设定值跟随特性为
|
(25) |
式中,ε为期望特性的时间常数,θ为期望特性的时滞时间,则由式(3)可知

|
(26) |
式中,kp=T/(kε)为比例增益,Ti=T为积分时间常数.
式(26)表明Gci(s)为PI控制器,且积分时间一定,比例增益取决于被控对象的时间常数Tij和增益系数kij,以及ε.显然ε取值越小,响应速度越快,因此ε的取值取决于被控对象所需满足的动态性能指标.
2.3 干扰抑制控制器设计为了使系统获得良好的干扰抑制特性和鲁棒性,采用内模控制方法设计干扰抑制控制器.将被控对象模型分解为最小相位部分Gm0(s)和非最小相位部分Gm+(s),即

|
(27) |
根据内模控制,干扰抑制控制器可设计为
|
(28) |
式中,qii(s)为各个回路的干扰抑制控制器,F(s)为低通滤波器矩阵,且
|
(29) |
取

|
(30) |
式中,λi是滤波器时间常数,则各个单回路干扰抑制控制器设计为
|
(31) |
由图 1可知,标称情况下即Gp(s)=Gm(s)时,干扰抑制回路的开环传递函数为
|
(32) |
用一阶泰勒级数逼近时滞项e-θiis≈1-θii(s),则
|
(33) |
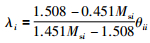
针对开环传递函数为一阶加时滞形式的系统,文[12]给出了控制器可调参数λi与系统最大灵敏度Ms之间的解析关系式为
|
(34) |
利用式(34)可以实现干扰抑制控制器的鲁棒整定.
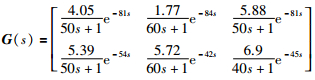
3 仿真研究以Shell标准控制问题为例验证所提方法的有效性,该问题以催化裂化装置中重油分馏塔为背景,具有多变量、多目标和强扰动等特点,是一个典型的三输入二输出强耦合大时滞非方系统,其传递函数矩阵为
|
(35) |
式中,时滞时间θ22 < θ23,因此根据式(23)添加对角矩阵
|
(36) |
解耦后传递函数矩阵为
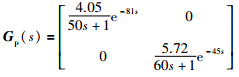
|
(37) |
根据式(21)、式(22)可知
|
(38) |
|
(39) |
将本文方法与文[5]中的方法相比较,为保证比较的公平性,使得所提方法与文献方法的响应速度基本相同,分别取ε1=12,ε2=7,则两个回路的PI控制器参数分别为:kp1=1,Ti1=50;kp2=1.49,Ti2=60.最大灵敏度分别取1.6,1.5.由式(34)可得λ1=78,λ2=56,则各个回路的干扰抑制控制器分别为
|
(40) |
|
(41) |
为验证反向解耦方法的解耦效果,在t1=0,t2=300 s,回路1和回路2分别加入幅值为1的给定阶跃输入信号,在t=600 s时加入幅值为0.1的阶跃扰动信号. y1和y2的输出响应曲线分别如图 4~7所示,控制系统的时间乘以误差绝对值积分性能指标(ITAE)如表 1所示,可见本文方法具有更好的动态响应性能.

|
| 图 4 标称情况下y1的阶跃响应 Figure 4 Nominal system step response of y1 |

|
| 图 5 标称情况下y2的阶跃响应 Figure 5 Nominal system step response of y2 |

|
| 图 6 输入扰动下y1的阶跃响应 Figure 6 Nominal system step response of y1 with input disturbance |

|
| 图 7 输入扰动下y2的阶跃响应 Figure 7 Nominal system step response of y2 with input disturbance |
为验证系统的鲁棒性,将被控对象的各传递函数的增益和滞后时间均增大20%,时间常数减小20%,模型摄动情况下系统输出的响应如图 8和图 9所示,系统ITAE性能指标如表 2所示.显然,本文方法具有较强的鲁棒性,性能指标也优于文[5]方法.

|
| 图 8 摄动情况下y1的阶跃响应 Figure 8 Perturbed system step response of y1 |

|
| 图 9 摄动情况下y2的阶跃响应 Figure 9 Perturbed system step response of y2 |
本文针对大时滞非方系统构造了多变量二自由度Smith解耦控制结构,并提出一种非方系统的反向解耦方法,实现了标称系统输出响应之间的完全解耦,而且计算简单,易于实现.对解耦后的广义被控对象应用Dahlin控制算法和内模控制的方法设计设定值跟随控制器和干扰抑制控制器,兼顾了系统的设定值跟随特性和干扰抑制特性以及鲁棒性.在Shell标准控制问题的仿真研究中,两个回路的输入信号分别为r1=1(t)和r2=1(t+300),与文[5]相比ITAE指标分别降低了34.56%和11.64%,在干扰信号di=0.1(t+600)作用下,ITAE性能指标分别降低了56.86%和49.33%,另外,当系统参数摄动时,两个回路的ITAE性能指标分别降低了2.9%和54.21%,仿真结果表明了本文方法的优越性,进一步的研究是将本文方法应用于实际生产过程.
| [1] |
陈培颖, 欧林林, 孙敬, 等.
改进的内模控制方法及其在非方系统中的应用[J]. 控制与决策, 2008, 23(5): 581–584.
Chen P Y, Ou L L, Sun J, et al. Modified internal model control and its application in non-square processes[J]. Control and Decision, 2008, 23(5): 581–584. DOI:10.3321/j.issn:1001-0920.2008.05.022 |
| [2] |
靳其兵, 刘斯文, 权玲, 等.
基于奇异值分解的内模控制方法及在非方系统中的应用[J]. 自动化学报, 2011, 3(37): 354–359.
Jin Q B, Liu S W, Quan L, et al. Internal model control based on singular value decomposition and its application to non-square processes[J]. ACTA Automatica Sinica, 2011, 3(37): 354–359. |
| [3] | Jin Q B, Jiang B Y, Wang Q, et al. Decoupling internal model control for non-square processes based on equivalent transfer function[J]. Transactions of the Institute of Measurement and Control, 2014, 36(8): 1114–1131. DOI:10.1177/0142331214534110 |
| [4] | Seshagiri R A, Chidambaram M. Smith delay compensator for multivariable non-square systems with multiple time delays[J]. Computer & Chemical Engineering, 2006, 30(8): 1243–1255. |
| [5] | Chen J, He Z F, Qi X. A new control method for MIMO first order time delay non-square systems[J]. Journal of Process Control, 2011, 21(4): 538–546. DOI:10.1016/j.jprocont.2011.01.007 |
| [6] | Jin Q B, Hao F, Wang Q. A multivariable IMC-PID method for non-square large time delay systems using NPSO algorithm[J]. Journal of Process Control, 2013, 23(5): 649–663. DOI:10.1016/j.jprocont.2013.02.007 |
| [7] | Lei S, Zhao Z C, Zhang J G. Design of fractional order smith predictor controller for non-square system[C]//Proceedings of the 12th World Congress on Intelligent Control and Automation. Piscataway, NJ, USA: IEEE, 2016: 1703-1707. |
| [8] | Zhang W D, Sun Y X, Xu X M. Two-degree-of-freedom Smith predictor for process with time delay[J]. Automatica, 1998, 34(10): 1279–1282. DOI:10.1016/S0005-1098(98)00075-2 |
| [9] | Wade H L. Inverted decoupling:A neglected technique[J]. ISA transactions, 1997, 36(1): 3–10. DOI:10.1016/S0019-0578(97)00008-6 |
| [10] | Garrido J, Vázquez F, Morilla F. An extended approach of inverted decoupling[J]. Journal of Process Control, 2011, 21(1): 55–68. DOI:10.1016/j.jprocont.2010.10.004 |
| [11] | Zhang Z G, Zou B G, Bi Z F. Dahlin algorithm design and simulation for time-delay system[C]//2009 Chinese Control and Decision Conference. Piscataway, NJ, USA: IEEE, 2009: 5819-5822. |
| [12] | Wang Y G, Shao H H. PID Auto-Tuner based on sentivity specification[J]. Chemical Engineering Research and Design, 2000, 78(2): 312–316. DOI:10.1205/026387600527176 |
| [13] | Jin Q B, Liu Q, Wang Q, et al. PID controller design based on the time domain information of robust IMC controller using maximum sensitivity[J]. Chinese Journal of Chemical Engineering, 2013, 21(5): 529–536. DOI:10.1016/S1004-9541(13)60522-4 |
| [14] | Xie L B, Shieh L S, Pan F, et al. Design of decoupling and tracking controllers for continuous-time transfer function matrices with multiple time delays[J]. Journal of Process Control, 2014, 24(1): 152–170. DOI:10.1016/j.jprocont.2013.11.002 |
| [15] | Rajapandiyan C, Chidambaram M. Controller design for MIMO processes based on simple decoupled equivalent transfer functions and simplified decoupler[J]. Industrial & Engineering Chemistry Research, 2012, 51(38): 12398–12410. |
| [16] | Garrido J, Vázquez F, Morilla F. Centralized inverted decoupling control[J]. Industrial & Engineering Chemistry Research, 2013, 52(23): 7584–7866. |
| [17] | Garrido J, Vázquez F, Morilla F. Inverted decoupling internal model control for square stable multivariable time delay systems[J]. Journal of Process Control, 2014, 24(11): 1710–1719. DOI:10.1016/j.jprocont.2014.09.003 |
| [18] | Sun L, Dong J Y, Li D H, et al. A practical multivariable control approach based on inverted decoupling and decentralized active disturbance rejection control[J]. Industrial & Engineering Chemistry Research, 2016, 55(7): 2008–2019. |
| [19] | Jin Q B, Liu Q. IMC-PID design based on model matching approach and closed-loop shaping[J]. ISA Transactions, 2014, 53(2): 462–473. DOI:10.1016/j.isatra.2013.11.005 |
| [20] |
赵志诚, 刘志远, 张井岗.
一种时滞过程内模PID控制器鲁棒整定方法[J]. 信息与控制, 2010, 39(5): 526–530.
Zhao Z C, Liu Z Y, Zhang J G. A robust tuning method of internal model PID controller for process with time-delay[J]. Information and Control, 2010, 39(5): 526–530. |
| [21] | Chen P Y, Zhang W D. Improvement on an inverted decoupling technique for a class of stable linear multivariable processes[J]. ISA Transactions, 2007, 46(2): 199–210. DOI:10.1016/j.isatra.2006.09.002 |
| [22] | Liu T, Zhang W, Gu D. Analytical design of two-degree-of-freedom control scheme for open-loop unstable processes with time delay[J]. Journal of Process Control, 2005, 15(5): 559–572. DOI:10.1016/j.jprocont.2004.10.004 |
| [23] | Liu T, Zhang W D, Gao F. Analytical two-degrees-of-freedom(2-DOF)decoupling control scheme for multiple input multiple output(MIMO)processes with time delays[J]. Industrial & Engineering Chemistry Research, 2007, 46(20): 6546–6557. |