



2. 河南省机器人与智能系统重点实验室, 河南 洛阳 471023
2. Henan Key Laboratory of Robot and Intelligent Systems, Luoyang 471023, China
0 引言
随着科技的发展,高空、高速、大机动能力的新空战目标成为拦截常态,这对防空导弹的响应速度提出了更高的要求,而采用直接力/气动力复合控制技术可显著提高拦截弹的响应速度[1].其中,轨控式复合控制导弹直接力可为拦截过程直接提供过载,大幅提高了拦截弹的机动能力.然而,直接力与气动力执行机构间存在差异,如何在保证弹体姿态稳定的前提下,对各执行机构过载指令进行合理分配,以充分发挥轨控式复合控制导弹快速跟踪机动过载的优势[2-3],是保证拦截效果的关键所在.
在导弹过载指令分配方面,Ridgely、郭超及胥彪等将所需过载看作虚拟指令,考虑约束条件对各执行机构控制量进行动态求解,获得了良好的过载分配精度及跟踪效果[4-6],该方法只适用于姿控式复合控制导弹.对于轨控式复合控制导弹过载指令分配问题,盛永智设计了“开差值”与“开定值”两种策略,有效减小了脱靶量[7].文[8]设计了一种差值分配策略,将过载指令与对应气动过载的差值作为直接力执行机构的过载指令,该分配方法有效缩短了弹体响应时间且容易实现.文[9]针对高空条件下飞行器气动舵效率不足等问题,设计了基于动压q的直接力/气动力控制分配函数,通过求解直接力/气动力权重系数,实现了指令过载的动态分配,但在复合控制开始和结束段不够平滑.赖薇等对分配函数进行了重新设计,引入S型曲线来表示气动舵和直接力间分配的权重系数,将权重系数斜率从定值变为变量,提高了分配过程的平顺性[10].
在导弹过载指令跟踪方面,由于直接力的引入会影响气动过载跟踪回路的稳定,王宇航等采用状态观测值作为反馈补偿项,设计了非平滑反馈控制律,实现了弹体的姿态稳定[11].朱隆魁等采用线性二次型最优控制的方法,设计了复合控制姿态稳定控制器[12].另外,滑模变结构控制也广泛应用于弹体姿态稳定设计,如滑模鲁棒控制[13-17]、二阶滑模控制[18]和高阶滑模控制[19-20]等,有效保证了气动过载的快速跟踪及弹体姿态的稳定.
然而,以上控制分配方法忽略了指令过载变化趋势对分配问题的影响.基于此,本文以直接力可调的轨控式复合控制导弹为对象,首先建立导弹俯仰通道数学模型;然后将过载指令及其1阶导数作为判定依据,设计了过载动态分配策略.在此基础上,结合气动过载与姿态角之间的关系,设计了滑模控制器来跟踪过载指令并稳定弹体姿态.
1 导弹模型建立以无翼式气动布局导弹为背景,其中X型舵面位于弹体尾部,弹体质心附近装有侧向喷流发动机及4个侧向推力调节装置的喷口,布局图如图 1所示.

|
| 图 1 执行机构布局示意图 Figure 1 Schematic diagram of the actuator layout |
图 1中,fin1、fin2、fin3、fin4为气动舵;Fmax为每个喷口能够产生的最大推力;δy+、δy-、δz+、δz-分别表示4个喷口产生的推力与最大推力Fmax的比值,称为各个喷口阀门的开度.
由于直接力的引入使得控制系统更加复杂,在建立弹体动力学模型之前,需先分析直接力的变化特性,而俯仰、偏航两通道控制过程相似,因此建立俯仰通道下直接力模型和弹体动力学模型,为后续研究奠定基础.
1.1 直接力模型直接力开启后,由于侧向喷流与空气来流间的相互干扰,会对直接力的大小产生影响.建立直接力模型之前,首先定义直接力干扰系数,来描述这种干扰效果,定义如下:
直接力干扰系数K:有自由流时侧向合力与无自由流时轨控发动机净推力的比值:

|
(1) |
式中,Fall为弹体所受合力,Fjet为喷流产生的净推力.
直接力干扰系数除了与轨控发动机配置参数有关外,还受来流马赫数、攻角和轨控发动机的开启情况的影响.
由图 1可知,y轴方向上的直接侧向力可表示为

|
(2) |
式中,δsy为直接力等效舵偏角,δsy=δy+-δy-.
将直接力执行机构看作1阶环节,其动态特性如式(3)所示:

|
(3) |
式中,δsyc为直接力舵偏指令,τ为直接力执行机构的动态时间常数.
直接力能够提供的过载是有限的,当侧向推力达到最大值Fmax时,其能够提供的最大可用过载记作nk2;同样,由于气动舵面的偏转角和偏转速率有限,且弹体姿态角也不可能无限增大,当舵面偏转角及攻角达到最大值δzmax及αmax时,所产生的过载为最大可用过载,正向记作nk1,负向记为nk11.
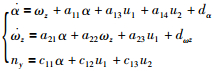
1.2 弹体动力学模型轨控式复合控制导弹,其产生的直接力不改变导弹姿态角,而是以提供过载的方式改变弹体的运动轨迹,因此数学模型相对简单且效果明显,当拦截弹以小攻角飞行时,气动力控制和直接力控制可近似实现解耦.现考虑俯仰通道的弹体运动,取α、ωz为状态变量,δz为气动力控制量用u1表示,δsy为直接力控制量用u2表示,建立导弹短周期数学模型:
|
(4) |
式中,dα、dωz为外界干扰带来的系统不确定部分;α为攻角;ωz为绕z轴旋转角速度;ny为弹体法向过载;系数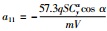







由于下文中涉及到气动过载的跟踪及姿态稳定问题,现只考虑气动舵对法向过载的作用,并且在导弹末制导阶段c12δz相对c11α较小,因此在过载方程中可忽略不计,此时气动过载用ny1表示,并记:

|
(5) |
控制部分的设计主要内容包括2个方面:其一是设计过载分配环节,本文考虑过载指令1阶导数的变化,将给定指令过载动态分为气动过载和直接过载,以求充分发挥轨控式复合控制导弹快速过载跟踪的优点;其二是设计气动过载跟踪及姿态稳定控制回路,实现气动过载的有效跟踪,并保证直接力引入后弹体姿态的稳定.控制框图如图 2所示.

|
| 图 2 复合控制示意图 Figure 2 Schematic diagram of the blended control |
针对轨控式复合控制导弹的分配策略,目前大都为硬切换的方式,即当指令过载大于气动舵最大可用过载时才启动直接力,而过载指令小于气动舵最大可用过载时只由气动舵来跟踪,这样做忽略了过载指令较小但有快速增大趋势的情况,没能充分发挥直接力快速跟踪过载的优势.
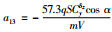
2.1.1 过载变化分析假设过载指令的1阶导数存在并对其作归一化处理,对于有正有负的过载指令而言,就可得到范围为(-1,1)的过载指令1阶导数,此处正负仅代表俯仰通道正反两个方向.为充分发挥直接力快速过载响应的特性,将过载指令1阶导数作为直接力权重系数,当过载指令变化较快时,确保直接力可得到较多的过载分配.本文对给定过载进行分配,因此其1阶导数可通过Simulink中的求导模块来获取;而当过载指令未知或不连续时,可采用微分的思想,利用微分器对过载指令1阶导数进行估计.按照过载指令及其1阶导数的不同状态,将过载分配过程分为4个不同阶段,每个阶段中将最大可用气动过载作为阈值,再分2种情况对过载进行分配.为方便描述,用nc、n′c、nk1、nk11、nc1、nc2分别表示过载指令、过载指令的1阶导数、正向最大可用气动过载、负向最大可用气动过载、气动力过载和直接力过载.
以nc>0且n′c>0阶段为例进行分析,该过程过载指令为正且有持续增大的趋势,将气动舵最大可用过载作为阈值,当分配所得气动过载小于最大可用气动过载时,直接力过载为n′cnc,则气动舵过载为(1-n′c)nc,此举为充分发挥直接力快速建立过载的特性,并做到了与气动舵间的协调控制.由约束条件可知,该阶段n′c的范围为(0,1)即(1-n′c)>0,该阶段过载指令nc>0,因此气动舵过载(1-n′c)nc>0.当分配所得气动过载大于最大可用气动过载时,气动舵保持最大可用过载nk1,直接力过载为nc-nk1,此举为考虑弹体燃油经济性,保持气动舵为最大可用过载.
2.1.2 过载分配策略基于前一节中对过载变化的分析,并采用最小燃料消耗与快速机动特性结合的原则,设计如下指令过载分配规则:
1) 当nc>0且n′c>0时:
若(1-n′c)nc7k1,则:
|
(6) |
若(1-n′c)nc>nk1,则:

|
(7) |
2) 当nc>0且n′c < 0时:
若(1+n′c)nc>nk1,则:

|
(8) |
若(1+n′c)nc≤nk1,则:
|
(9) |
3) 当nc < 0且n′c < 0时:
若(1+n′c)nc>nk11,则:
|
(10) |
若(1+n′c)nc≤nk11,则:
|
(11) |
4) 当nc < 0且n′c>0时:
若(1-n′c)nc≥nk11,则:
|
(12) |
若(1-n′c)nc < nk11,则:

|
(13) |
由于分配过程以气动力最大可用过载为阈值,因此分配所得气动过载必定连续,现针对第1阶段对直接力指令过载分配是否连续进行分析.该阶段切换的临界条件是(1-n′c)nc=nk1即

为验证以上分配策略是否做到直接力/气动力间的协调控制,充分发挥复合控制导弹快速建立过载的优势,需对指令过载跟踪回路进行设计.
2.2 过载跟踪控制过载跟踪分为直接力过载跟踪和气动力过载跟踪两个部分.对于轨控式复合控制导弹而言,直接力过载跟踪无需改变弹体姿态,只需考虑直接力执行机构动态特性,具体过程1.1节中已给出详细介绍.而气动过载的跟踪是通过舵偏角的变化来实现,而舵偏角的变化存在限制,在跟踪气动过载的同时需兼顾弹体姿态的稳定,因此设计滑模控制器来实现气动力过载跟踪控制.
由于气动过载ny1与攻角α存在一定关系,因此可通过跟踪攻角来间接跟踪气动指令过载nc1.将指令过载nc1代入式(5)可得

|
(14) |
式中,αc为攻角指令.
采用滑模变结构控制理论设计姿态稳定控制器,定义误差:

|
(15) |
式中,ωzc为角速度指令.
为减小式(15)所示误差,实现过载跟踪及弹体姿态的稳定,取滑模面:

|
(16) |
式中,c为滑模系数.
由上文可知过载指令nc是1阶可导的,因此气动过载nc1也是1阶可导的,对式(16)两边求导可得
|
(17) |
取指数趋近律:

|
(18) |
将式(4)、式(18)和式(14)代入式(17)中,可得:

|
(19) |
其中,d=cdα+dωz,由于该不确定项的存在,使得以上控制律无法实现,本文采用干扰的界来设计控制律.
将控制律(19)改写为

|
(20) |
其中,dc为待设计的与干扰d的界相关的正实数.
假设dL和dM为干扰的界,即dL≤d≤dM,则dc的值为dc=d2-d1sgn s.其中,

稳定性分析:令
|
(21) |
由式(21)可以看出,V(s)≥0且
假设导弹质量m=150 kg,重力加速度g=9.8 m/s2,特征长度L=1.5 m,转动惯量Jz=293 kg·m2,干扰系数K=1.05,滑模系数c=5,时间常数τ=0.001 s,最大直接推力Fmax=10 000 N,攻角约束|α|≤25°,最大旋转角速度为100°/s.选取飞行速度V=1 500 m/s,高度H=20 000 m作为特征点,飞行过程中假设导弹质量不变,则气动参数可由常值表示.为使气动舵在高空条件下能够快速跟踪过载指令并稳定弹体姿态,参考相关文献得出滑模控制器各参数值及弹体气动参数,如表 1所示.
| a11 | a13 | a21 | a22 | a23 | c11 | k | ε |
| -0.049 | -0.031 | -48.38 | -506.4 | -15.38 | 0.087 3 | 500 | 20 |
文中以幅值为10个g、周期为2 s的正弦信号作为指令过载,将经归一化处理后的指令过载1阶导数作为分配权重,则其数值大小是幅值为1、周期为2 s的余弦信号.以Matlab模块化软件Simulink结合m文件的形式,对本文所设计的过载动态分配及跟踪策略进行仿真验证,由以上参数进行仿真可得出攻角α、旋转角速度ωz、过载ny等随时间变化的曲线,结果如图 3~图 6所示.

|
| 图 3 法向过载分配曲线 Figure 3 The normal overload allocation curves |

|
| 图 4 过载跟踪曲线 Figure 4 The overload tracking curves |

|
| 图 5 法向过载复合跟踪曲线 Figure 5 The normal overload blended tracking curves |

|
| 图 6 弹体姿态变化曲线 Figure 6 The attitude changing curves |
图 3为法向过载分配结果.从图 3可以看出,气动舵偏角的限制使得最大可用气动过载为2 g.其中图 3(a)为本文所设计的过载分配结果,可以看出在过载跟踪初始阶段,指令过载尽管较小但有快速增大的趋势,此时同时开启了直接力和气动力,并且根据指令过载的变化动态调节分配比例,直至气动过载达到最大可用过载;图 3(b)为现有轨控式复合控制导弹过载分配策略,属于简单切换的分配方式,即当气动过载达到最大可用过载后才开启直接力.
图 4为执行机构过载跟踪结果.其中图 4(a)为气动力过载跟踪,由图可知,气动过载的跟踪存在少量滞后及超调.产生的原因在于气动过载的跟踪主要依靠姿态角的变化,且在高空条件下气动舵效率有所降低;图 4(b)为直接力过载跟踪,由图可知,该过程也存在一定滞后,原因在于考虑了执行机构的动态响应特性,但与气动力过载跟踪结果相比已经有很大改善.证明了直接力在高空、高速的飞行环境下可以很好地实现过载跟踪.
图 5为法向过载复合跟踪结果,其中图 5(a)为本文所设计分配策略所得过载跟踪效果,图 5(b)为现有分配策略过载跟踪效果.对比可以看出,在整个过程中,图 5(a)所示结果都能较好地跟踪指令过载,特别是跟踪初期的效果明显优于图 5(b).由仿真结果可知,本文所设计的分配策略可以更好地协调两套执行机构间的分配问题,充分发挥直接力快速过载跟踪的优势.
图 6为弹体姿态变化曲线,其中图 6(a)为攻角变化曲线,图 6(b)为旋转角速度变化曲线.从图中可以看出,本文所设计的气动过载跟踪回路,可以很好地维持弹体姿态稳定,并且将攻角及旋转角速度维持在限制范围内.
图 7为过载跟踪相对误差曲线,其中图 7(a)为气动力过载跟踪相对误差,图 7(b)为直接力过载跟踪相对误差.从图中可以看出,气动过载跟踪其相对误差虽然可以达到不错的效果,即可维持在10%以内,但和精度为0.2%左右的直接力过载跟踪相比,其跟踪效果略显不足.正是由于轨控式直接力过载的建立不依赖外界环境,在低动压的情况下仍可快速跟踪过载指令.因此,充分发挥直接力快速跟踪过载的优势,显得尤为重要. 图 7(c)为复合过载跟踪精度曲线,对比了本文所设计控制分配策略和现有控制分配策略下,复合过载跟踪精度的情况.从图中可以看出,在0、1和2三个指令变化较快的时刻,现有分配策略下的跟踪精度为8%左右,时间为1 s时其精度仅为10%,而本文过载跟踪精度一直保持在2%以内.由此可见,本文所设计的控制分配策略,在指令变化较快时仍可确保过载的精确跟踪.

|
| 图 7 过载跟踪相对误差曲线 Figure 7 The overload tracking relative error curves |
1) 将指令过载1阶导数作为权重系数,提出一种动态过载分配策略.该策略显著提高了直接力与气动力间的协调性,优化了过载指令在具有快速变化趋势情况下的跟踪效果,与现有分配策略相比,复合过载跟踪精度提高了近4倍.
2) 考虑气动过载与攻角的关系,将过载跟踪转化为姿态角的跟踪问题,降低了兼顾过载跟踪及姿态稳定控制器的设计难度.以攻角误差和角速度误差作为滑模面设计了滑模控制器,保证气动过载的快速跟踪,并维持了弹体姿态的稳定.
3) 文中所述指令过载分配策略,是在给定过载的情况下进行设计的,引入拦截目标后,如何实现导弹的精确拦截是接下来的研究重点.
| [1] |
魏明英.
直接侧向力与气动力复合控制技术综述[J]. 现代防御技术, 2012, 40(1): 52–54, 76.
Wei M Y. Summary of blended control technology for missiles with lateral jets and aerodynamic surfaces[J]. Modern Defence Technology, 2012, 40(1): 52–54, 76. DOI:10.3969/j.issn.1009-086x.2012.01.011 |
| [2] | Kishore W C A, Sen S, Ray G, et al. Dynamic control allocation for tracking time-varying control demand[J]. Journal of Guidance Control and Dynamics, 2008, 31(4): 1150–1157. DOI:10.2514/1.34085 |
| [3] | Kim S, Cho D, Kim H J. Force and moment blending control for fast response of agile dual missiles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(2): 938–947. DOI:10.1109/TAES.2015.140169 |
| [4] | Ridgely D B, Lee Y, Fanciullo T. Dual aero/propulsive missile control-optimal control and control allocation[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Los Angeles, CA, USA: AIAA, 2006: 6570-6591. |
| [5] |
郭超, 梁晓庚, 王俊伟, 等.
临近空间拦截弹的非奇异终端滑模控制[J]. 宇航学报, 2015, 36(1): 58–67.
Guo C, Liang X G, Wang J W, et al. Nonsingular terminal slide mode control for near space interceptor[J]. Journal of Astronautics, 2015, 36(1): 58–67. DOI:10.3873/j.issn.1000-1328.2015.01.008 |
| [6] |
胥彪, 周荻.
基于反步法及控制分配的导弹直接侧向力/气动力复合控制[J]. 系统工程与电子技术, 2014, 36(3): 527–531.
Xu B, Zhou D. Backstepping and control allocation for dual aero/propulsive missile control[J]. Systems Engineering and Electronics, 2014, 36(3): 527–531. |
| [7] |
盛永智.
轨控直接力/气动力复合控制拦截弹的自动驾驶仪设计[J]. 现代防御技术, 2009, 37(6): 51–54.
Sheng Y Z. Autopilot design for interceptor with blended control by aerodynamic force and divert thruster[J]. Modern Defence Technology, 2009, 37(6): 51–54. DOI:10.3969/j.issn.1009-086x.2009.06.011 |
| [8] |
佟鑫.轨控式直/气复合导弹控制与制导方法研究[D].哈尔滨: 哈尔滨工程大学, 2015. Tong X. Research on guidance and control for missile with aerodynamic and thrust[D]. Harbin: Harbin Engineering University, 2015. http://cdmd.cnki.com.cn/Article/CDMD-10217-1018052278.htm |
| [9] |
钱承山, 吴庆宪, 姜长生, 等.
基于反作用发动机推力的空天飞行器再入姿态飞行控制[J]. 航空动力学报, 2008, 23(8): 1546–1552.
Qian C S, Wu Q X, Jiang C S, et al. Flight control for an aerospace vehicle's reentry attitude based on thrust of reaction jets[J]. Journal of Aerospace Power, 2008, 23(8): 1546–1552. |
| [10] |
赖薇, 孟斌, 孙洪飞, 等.
高超声速飞行器再入姿态鲁棒控制[J]. 控制理论与应用, 2015, 32(10): 1287–1297.
Lai W, Meng B, Sun H F, et al. Robust attitude control of hypersonic vehicles in reentry phase[J]. Control Theory and Applications, 2015, 32(10): 1287–1297. |
| [11] |
王宇航, 马克茂.
直接力与气动力复合控制系统姿态稳定问题研究[J]. 宇航学报, 2007, 28(4): 840–844.
Wang Y H, Ma K M. Research of attitude stabilization problem for control system with lateral thrust and aerodynamics blended[J]. Journal of Astronautics, 2007, 28(4): 840–844. DOI:10.3321/j.issn:1000-1328.2007.04.013 |
| [12] |
朱隆魁, 汤国建, 余梦伦.
防空导弹直接力/气动力复合控制系统设计[J]. 宇航学报, 2008, 06: 1895–1900.
Zhu L K, Tang G J, Yu M L. Compound control system design with direct thrust and aerodynamic force for air defence missile[J]. Journal of Astronautics, 2008, 06: 1895–1900. |
| [13] |
徐世许, 马建敏.
不确定MIMO线性系统的全局快速终端滑模控制[J]. 信息与控制, 2011, 40(5): 633–638.
Xu S X, Ma J M. Global fast terminal sliding mode control of uncertain mimo linear systems[J]. Information and Control, 2011, 40(5): 633–638. |
| [14] |
贾倩, 魏明英, 郭大勇.
高空轨控式直接侧向力/气动力复合控制方法[J]. 现代防御技术, 2015, 43(6): 61–67.
Jia Q, Wei M Y, Guo D Y. Orbital lateral thrust/aerodynamic force blended control methodin high altitude[J]. Modern Defence Technology, 2015, 43(6): 61–67. DOI:10.3969/j.issn.1009-086x.2015.06.011 |
| [15] |
卜祥伟, 吴晓燕, 陈永兴, 等.
基于非线性干扰观测器的高超声速飞行器滑模反演控制[J]. 控制理论与应用, 2014, 31(11): 1473–1479.
Bu X W, Wu X Y, Chen Y X, et al. Nonlinear-disturbance-observer-based sliding mode backstepping control of hypersonic vehicles[J]. Control Theory and Applications, 2014, 31(11): 1473–1479. |
| [16] |
王青, 江一帆, 董朝阳, 等.
基于动态逆的复合控制导弹H∞最优输出跟踪控制[J]. 兵工学报, 2014, 35(4): 552–558.
Wang Q, Jiang Y F, Dong C Y, et al. H∞ optimal output tracking control for dual-controlled missile with tails and reaction jets based on dynamic inverse theory[J]. Acta Armamentarii, 2014, 35(4): 552–558. DOI:10.3969/j.issn.1000-1093.2014.04.018 |
| [17] |
付主木, 曹晶, 王晓红.
具有末端落角约束的空地导弹滑模变结构制导律设计[J]. 信息与控制, 2015, 44(3): 291–297.
Fu Z M, Cao J, Wang X H. Design of sliding model variable structure guidance law with terminal impact angle constraints[J]. Information and Control, 2015, 44(3): 291–297. |
| [18] | Idan M, Shima T, Golan O M. Integrated sliding mode autopilot-guidance for dual-control missiles[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(4): 1081–1089. DOI:10.2514/1.24953 |
| [19] |
马克茂, 董继鹏, 张金鹏.
高阶滑模制导律的设计与实现[J]. 航空兵器, 2014(5): 9–14.
Ma K M, Dong J P, Zhang J P. Design and implementation of higher-order sliding mode guidance law[J]. Aero Weaponry, 2014(5): 9–14. DOI:10.3969/j.issn.1673-5048.2014.05.002 |
| [20] |
王婕, 宗群, 田栢苓, 等.
基于拟连续高阶滑模的高超声速飞行器再入姿态控制[J]. 控制理论与应用, 2014, 31(9): 1166–1173.
Wang J, Zong Q, Tian B L, et al. Reentry attitude control for hypersonic vehicle based on quasi-continuous high order sliding mode[J]. Control Theory and Applications, 2014, 31(9): 1166–1173. |