



0 引言
近年来,随着无线传感器网络技术的快速发展,应用移动传感/执行器对现实世界进行观测或控制受到越来越多的学者的关注[1-3].与传统的固定控制(控制器固定于其空间初始位置)相比,移动控制有其独特的优点.一方面,某些控制系统自身的特性决定了控制器必须具有移动属性,如移动智能体的一致性控制[4-5],移动机器人的避障控制[6]或视觉导航[7]等;另一方面,对某些实际问题,如化工生产过程中晶体的生长过程控制[8],固定控制并不能取得良好的效果,而移动控制相当于又增加了一个控制维度,实时性较强,能增强系统的控制性能.因此,移动控制具有重要的理论研究价值与实际应用意义.
目前,国内外关于移动控制的研究成果已经相当丰富[1-7, 9],然而相关的研究成果大都是基于集中参数系统.而大多数的实际应用系统一般由具有时空特性的偏微分方程来表示,通常称作分布参数系统.因此,基于分布参数系统的移动控制研究更具有理论和实际意义[8, 10-18].文[10]对分布参数系统的移动控制理论进行了研究展望.文[11-12]在分布参数系统的移动观测和控制上做了很多基础性的工作.文[13-14]研究了一种无穷维大加减速轴向移动系统的边界控制问题.最近十几年来,基于移动传感器/执行器网络,国内外学者在分布参数系统的移动控制或移动观测方面进行了广泛的研究.文[15]针对一类扩散过程,构建了一个基于CVT(central Voronoi Tessellations)算法的移动智能体的二维仿真平台,然而其智能体的移动策略是由固定在区域内的传感器的测量值基于CVT算法得到的,与系统的状态方程无关.文[16]基于具有参数不确定性的T-S模糊模型,研究了一类双曲型分布参数系统的鲁棒反馈控制问题.同时,基于分布参数系统的移动控制中智能体的防碰撞问题也受到了学者们的重视.文[17]应用李亚普诺夫直接方法研究了移动传感器对一类空间分布过程的状态估计问题,并考虑了移动传感器的防碰撞问题.基于类似方法,文[18]研究了移动传感器/执行器网络在防碰撞的前提下对一类分布参数系统的控制问题.
近年来,一类具有活动边界的分布参数系统的控制也受到了人们的关注.在实际系统中,某些扩散过程,如化工过程中的晶体生长[8]、污染物的扩散[19]等,就属于活动边界分布参数系统,一般由抛物型偏微分方程来表示,其空间域是移动的,具有时间依赖性,空间域的时间依赖性对控制器的设计有很大影响.固定控制并不能很好地处理这种特性,甚至会使系统变得不稳定.在已有的活动边界分布参数系统的控制研究当中,大都是基于有限维近似理论,把系统分解为有限维的慢系统和无限维稳定的快系统.但是,有限维近似理论在处理过程中会舍去无限维的快系统而引起控制或观测精度的降低.在固定边界分布参数系统的控制中,文[20]直接根据系统的状态方程,基于无穷维算子理论与李亚普诺夫稳定性方法,得到了并列的传感器/执行器的移动策略.然而,基于此方法的活动边界分布参数系统的具防碰撞的移动控制还少见报道.
本文应用无穷维系统的抽象发展方程理论研究一类具有活动边界的分布参数系统的移动控制问题,主要工作和创新点在于:
1) 直接根据分布参数系统的方程来研究移动控制策略,同时考虑系统的活动边界对相应的移动控制策略的影响.
2) 提出一种简单的输出反馈控制律,降低了无线传感器/执行器网络中的在线计算复杂度.
3) 考虑无线传感器/执行器网络中传感器的传感范围及是否使用其它节点的测量信息,设计不同的防碰撞函数和反馈控制律,并最终得到了不同的移动控制策略.
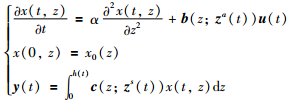
1 问题描述考虑具有活动边界的分布参数系统:
|
(1) |
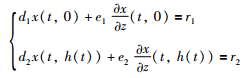
边界条件为
|
(2) |
上述系统中,α>0为扩散系数;x(t,z)∈R表示系统状态;t∈R+为时间变量;z为空间变量;h(t)是活动边界;u(t)=(u1(t),…,uM(t))T∈RM,为M维控制输入;b(z;za(t))和c(z;zs(t))为已知的M维和N维向量值函数,分别表示执行器和传感器在空间域[0,h(t)]内的空间分布;za(t)=(z1a(t),…,zMa(t))和zs(t)=(z1s(t),…,zNs(t))表示执行器和传感器在时变空间域内的位置;y(t)=(y1(t),…,yN(t))T∈RN,为测量输出,其中yi(t)=∫0h(t)ci(z;zis(t))x(t,z)dz表示第i个传感器的测量输出;x0(z)是系统初始状态值;d1、e1、d2、e2、r1、r2均为实数.
在本文中,引入基于抛物型偏微分方程的抽象发展方程理论[20]来解决相关问题.设Η2是定义在Ω(t)=[0,h(t)]上的Hilbert空间,在Η2上定义内积:

|
及由该内积诱导的范数:

|
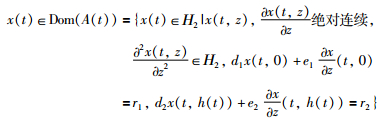
在Hilbert空间Η2内,令:

|
二阶时变算子A(t):Η2→Η2为时间t的函数,满足:

|
其中,
|
输入算子为B(za(t)):RM→Η2,满足:

|
输出算子为C(zs(t)):RN→Η2,满足:

|
其中,

|
为测量传感器的空间分布向量函数.
根据上述理论,在Hilbert空间Η2内,活动边界分布参数系统(1)、(2)可以写为抽象发展方程的形式:

|
(3) |
为了下面本文主要结论的理论分析,发展方程(3)中,算子A(t)被假设为有界的和对称的,算子-A(t)是强制的[20].下述假设保证了发展方程(3)的适定性并且简化了定理的证明.
假设1 算子A(t)可微,并且对任意ϕ∈Η2,

同时,假设每个移动智能体上安装了一个传感器和一个执行器,即N=M,并且满足zia(t)=zis(t)且bi(z;zia(t))=ci(z;zis(t)).易知,当满足上述条件时,b(z;za(t))=c(z;zs(t))且输出算子与输入算子互为共轭算子,即C(zs(t))=B*(za(t)),简记为C=B*.
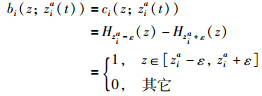
由上述定义,本文中的传感器/执行器空间分布选取为常见形式:
|
(4) |
其中,ε>0,Hθ(z)=H(z-θ)为Heaviside函数.
另外,本文考虑基于系统方程的防碰撞控制策略,系统本身的特性对策略的提出会有很大影响,根据实际应用背景,假设:
假设2 分布参数系统(1)的活动边界h(t)是已知的光滑函数,并且对任意t>0,
最后,假设每个移动智能体的位置状态zia(t)与速度状态

|
(5) |
其中,mi为智能体质量,fi(t)是需要设计的控制力.
由此,本文需解决3个问题:
1) 设计何种控制器使分布参数系统(1)渐近稳定;
2) 在相应的控制器下,如何设计对每个智能体的控制力fi(t);
3) 在相应的控制力fi(t)作用下,如何避免智能体之间发生碰撞.
可以看出,问题1)对问题2)和问题3)有很大的影响.由此,为了降低控制器的在线计算复杂度并简化上述问题2)和问题3)的分析,针对问题1),本文提出一类简单的输出反馈控制器:

|
(6) |
其中,K>0为控制器的反馈增益矩阵.
基于上述描述与假设,发展方程(3)可以表示为
|
(7) |
本节主要解决上节所提出的3个问题.首先,假设传感器的传感半径为S,智能体之间防碰撞的最小安全距离为s,S>s>0,引入防碰撞函数[17]:
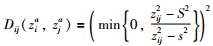
|
(8) |
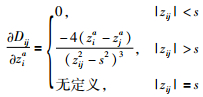
其中,zij=‖zia-zja‖,表示两个智能体之间的距离.上述防碰撞函数可以看作智能体之间的“排斥力”,其优点是既能避免智能体之间发生碰撞,又不会影响移动控制器对系统的控制效果.容易证明,防碰撞函数(8)的空间导数为
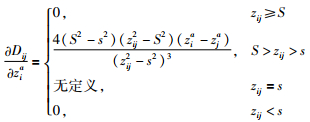
|
(9) |
由此,输出反馈控制器(6)设计为
|
(10) |
其中,σ(i)={j|zij < S,S>s>0,i=1,…,N},表示所有在第i个传感器传感范围内的智能体个数的指标集.
为了证明定理,首先给出引理1:
引理1 令V1(t)=-〈x(t),Acl(zia(t))x(t)〉,则μ1‖x(t)‖2≤V1(t)≤μ2‖x(t)‖2成立.其中,Acl(zia(t))=A(t)-BKB*,μ1=α2+λmin(K)‖B*‖2,μ2=α1+λmax(K)‖B*‖2,α1>0和α2>0分别为前述算子A(t)的有界性和强制性系数,λmin(K)和λmax(K)分别表示矩阵K的最小和最大特征值.
证明 由假设算子A(t)的有界性及强制性得
|
(11) |
|
(12) |
证毕.
定理1 考虑具有活动边界的分布参数系统(1),每个移动智能体满足运动方程(5).若:
1) 反馈控制律设计为式(10);
2) 移动智能体的运动控制力设计为
|
(13) |
则分布参数系统(1)在反馈控制律(10)作用下渐近稳定,并且控制力(13)保证智能体在移动控制的同时不会发生碰撞.其中,Δxi=x(t,zia(t)+ε)-x(t,zia(t)-ε),γi>0为速度反馈增益,i=1,…,N,ω为防碰撞的权重系数.
证明 考虑闭环系统(7),构造李亚普诺夫函数:

|
(14) |
其中,V1(t)=-〈x(t),Acl(zia(t))x(t)〉为闭环系统的能量;
显然,由引理1知,V(t)是正定的.下面计算V(t)沿系统(7)的轨迹对时间t的导数:

|
(15) |
应用Leibnitz法则[19],得到:
|
(16) |
由假设1知,对所有非零状态点x(t):

|
(17) |
应用式(4),容易证明:
|
(18) |
并且由引理1及假设2知:
|
(19) |
结合式(16)~式(19),得到:

|
(20) |
同时易知:

|
(21) |
|
(22) |
将式(20)、式(21)及式(22)代入式(15)得
|
(23) |
由于γi>0,将所提控制力(13)代入式(23)得
|
(24) |
综上,对任意非零状态x(t),V(t)正定且
注1 定理1中具防碰撞的控制力(13)由4个部分组成:



注2 本文所提移动控制策略(13)能够提升控制器(10)的控制性能.事实上,李亚普诺夫函数(14)表示闭环系统(7)的能量.对任意时刻t>0,由式(20)~式(22)知,当控制器固定,即

特殊地,若无线传感网络的传感范围S足够大,前述防碰撞函数(8)可改进为简单形式:

|
(25) |
其空间导数为
|
(26) |
此时若智能体网络是全连通的,即每个传感器会接收并应用其它传感器的测量信息,则反馈控制器可设计为

|
(27) |
据此,可以得到定理2.
定理2 考虑具有活动边界的分布参数系统(1),每个移动智能体满足运动方程(5),若反馈控制律设计为(27),移动智能体的运动控制力设计为
|
(28) |
则分布参数系统(1)在反馈控制律(27)作用下渐近稳定,并且控制力(28)保证智能体在移动控制的同时不会发生碰撞.其中,Δxi=x(t,zia(t)+ε)-x(t,zia(t)-ε),γi>0为速度反馈增益,i=1,…,N,ω为防碰撞的权重系数.
证明 与定理1类似,从略.
注3 作为定理2的一种特殊情况,如果智能体只采用自身的测量数据,则反馈控制器可设计为ui(t)=-kiyi(t);如果防碰撞函数仍然设计为式(25),则相应的移动智能体的运动控制力可设计为
|
(29) |
仍能保证系统(1)渐近稳定并且移动智能体不会发生碰撞.
注4 如果某个智能体的速率为0,则控制力(13)无意义.为了达到控制效果,对控制力(13)作如下修改:当t>0时,假设有n个智能体速率不为0且1≤n≤N,则控制力(13)可以修改为
|
(30) |
此时,将控制力(30)代入式(23),仍然有
注5 定理1和定理2及注3中所提出的移动智能体的控制力在形式上具有相似性.其本质区别在于,根据不同的传感器通信方式设计了不同的反馈控制器,并通过选择不同的防碰撞函数设计了不同的控制力.因此,传感器之间或者传感器/控制器之间在网络通信过程中所遇到的问题(时滞、丢包等)极大地影响本文所提出的控制方法,这也是以后要考虑的问题之一.
3 仿真实例为了验证本文所提出的具有防碰撞的移动控制策略的有效性,考虑分布参数系统(1),选取扩散系数α=0.009,系统的活动边界h(t)=1.5-0.4e-0.02t2.7满足假设2,初始条件x0(z)=sin(3z)e-3z2,取N=3,t∈[0,12s],初始位置分别为z10=0.2,z20=0.5,z30=1.0.控制器增益为k11=20,k22=15,k33=30,k12=k21=20,k13=k31=0,k23=k32=20.动态方程(5)中参数mi=1,所设计的控制力中参数取为γi=1,μ2=0.2,β=0.1,ω=1.传感器的传感半径S=0.12,防碰撞的最小安全距离s=0.04.
在相同的条件下,以状态x(t,z)的空间L2范数
| 控制类型 | 开环控制 | 固定控制 | 移动控制 |
| 累积范数CN | 0.582 69 | 0.414 68 | 0.304 22 |

|
| 图 1 状态的空间L2范数演变 Figure 1 Evolution of spatial L2 norm of the state |
为了验证本文所提出的防碰撞控制力的效果,图 2和图 3分别展示了在相同条件下无防碰撞函数时和有防碰撞函数时智能体在空间域内的移动轨迹,可以看出在没有防碰撞策略的控制力作用下智能体发生了碰撞(图 2),而在本文所提出的控制力的作用下智能体没有发生碰撞(图 3).

|
| 图 2 无防碰撞策略下智能体的移动轨迹 Figure 2 Trajectories of the agents without collision avoidance |

|
| 图 3 防碰撞策略下智能体的移动轨迹 Figure 3 Trajectories of the agents with collision avoidance |
图 4给出了移动智能体之间的相对距离,可以看出在本文所提碰撞控制策略下,相邻两个智能体之间的距离均没有超过所设置的最小安全距离.

|
| 图 4 相邻智能体间的相对距离 Figure 4 Relative distance between the adjacent agents |
本文研究了一类具有活动边界的分布参数系统的移动控制问题,提出了基于防碰撞的移动控制策略.本文考虑传感器的传感范围及是否使用其邻居节点的测量信息,设计了不同的防碰撞函数和反馈控制律.结论表明,本文提出的具防碰撞移动控制策略能使系统更快地稳定,同时系统边界的时间依赖性也对所提出的控制策略有很大影响.仿真结果表明,所提移动控制策略在保证智能体不发生碰撞的前提下,相较于固定控制,对分布参数系统的控制性能有了较大的提升.由于传感器之间或者传感器与执行器/控制器之间通信时滞或丢包的广泛存在,因此基于活动边界分布参数系统的具有通信时滞或丢包的移动控制是以后要考虑的问题.
| [1] | Xia F, Tian Y C, Li Y J, et al. Wireless sensor/actuator network design for mobile control applications[J]. Sensors, 2007, 7(10): 2157–2173. DOI:10.3390/s7102157 |
| [2] | Chen L, Gu Y, Guo S, et al. Group-based neighbor discovery in low-duty-cycle mobile sensor networks[J]. IEEE Transactions on Mobile Computing, 2016, 15(8): 1996–2009. DOI:10.1109/TMC.2015.2476471 |
| [3] | Cortes J, Martinez S, Karatas T, et al. Coverage control for mobile sensing networks[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 243–255. DOI:10.1109/TRA.2004.824698 |
| [4] |
黄红伟, 黄天民, 吴胜, 等.
基于事件触发的二阶多智能体系统平均一致性[J]. 信息与控制, 2016, 45(6): 729–734, 758.
Huang H W, Huang T M, Wu S, et al. Event-triggered average consensus of second-order multi-agent systems[J]. Information and Control, 2016, 45(6): 729–734, 758. |
| [5] |
金治群, 牛玉刚, 邹媛媛.
带有滑模观测器的多智能体一致性控制[J]. 控制理论与应用, 2017, 34(2): 251–259.
Jin Z Q, Niu Y G, Zou Y Y. Consensus for multiagent systems with sliding-mode observer[J]. Control Theory & Applications, 2017, 34(2): 251–259. |
| [6] |
王蛟龙, 周洁, 高慧, 等.
基于局部环境形状特征识别的移动机器人避障方法[J]. 信息与控制, 2015, 44(1): 91–98.
Wang J L, Zhou J, Gao H, et al. Obstacle avoidance method for mobile robots based on the identification of local environment shape features[J]. Information and Control, 2015, 44(1): 91–98. |
| [7] |
许亚芳, 孙作雷, 曾连荪, 等.
基于迭代观测更新的移动机器人视觉导航[J]. 信息与控制, 2015, 44(6): 739–744, 752.
Xu Y F, Sun Z L, Zeng L S, et al. Mobile robot visual navigation with iterative measurement updating[J]. Information and Control, 2015, 44(6): 739–744, 752. |
| [8] | Ng J, Aksikas I, Dubljevic S. Control of parabolic PDEs with time-varying spatial domain:Czochralski crystal growth process[J]. International Journal of Control, 2013, 86(9): 1–12. |
| [9] |
张霖, 欧林林, 俞立.
执行能力有限的两差动轮机器人目标跟踪控制器[J]. 信息与控制, 2015, 44(2): 152–158.
Zhang L, Ou L L, Yu L. Target-tracking controller design for differential drive mobile robots with limited actuator capacity[J]. Information and Control, 2015, 44(2): 152–158. |
| [10] | Butkovskiǐ A G, Pustylnikova E I. Theory of mobile control of distributed parameter systems[J]. Automation and Remote Control, 1980, 41(6): 741–747. |
| [11] | Khapalov A Y. Continuous observability for parabolic system under observations of discrete type[J]. IEEE Transactions on Automatic Control, 1993, 38(9): 1388–1391. DOI:10.1109/9.237651 |
| [12] | Khapalov A Y. Controllability of the wave equation with moving point control[J]. Applied Mathematics and Optimization, 1995, 31(2): 155–175. DOI:10.1007/BF01182786 |
| [13] |
赵志甲, 刘屿, 邬依林, 等.
大加减速轴向移动系统自适应边界控制[J]. 控制与决策, 2016, 31(6): 1003–1008.
Zhao Z J, Liu Y, Wu Y L, et al. Adaptive boundary control of axially moving system with ac-/deceleration[J]. Control and Decision, 2016, 31(6): 1003–1008. |
| [14] |
刘屿, 赵志甲, 邬依林.
大加减速轴向移动系统自适应反步边界控制[J]. 控制与决策, 2017, 32(7): 1173–1180.
Liu Y, Zhao Z J, Wu Y L. Adaptive backstepping boundary control of axially moving system with high ac-/deceleration[J]. Control and Decision, 2017, 32(7): 1173–1180. |
| [15] | Liang J, Chen Y Q. Diff/Wave-MAS2D: A simulation platform for measurement and actuation scheduling in distributed parameter systems with mobile actuators and sensors[C]//Proceedings of the IEEE International Conference on Mechatronics and Automation. Piscataway, NJ, USA: IEEE, 2005: 2228-2233. |
| [16] | Qiu J, Ding S X, Gao H, et al. Fuzzy-model-based reliable static output feedback H∞ control of nonlinear hyperbolic PDE systems[J]. IEEE Transactions on Fuzzy Systems, 2015, 24(2): 388–400. |
| [17] | Demetriou M A, Ucin'ski D. State estimation of spatially distributed processes using mobile sensing agents[C]//American Control Conference. Piscataway, NJ, USA: IEEE, 2011: 1770-1776. |
| [18] |
江正仙, 崔宝同, 楼旭阳, 等.
基于防碰撞的移动SAN对分布参数系统的控制[J]. 控制与决策, 2014, 29(12): 2242–2246.
Jiang Z X, Cui B T, Lou X Y, et al. Controlling distributed parameter systems utilizing mobile sensor-actuator networks with guaranteed collision avoidance[J]. Control and Decision, 2014, 29(12): 2242–2246. |
| [19] | Knobloch E, Krechetnikov R. Problems on time-varying domains:Formulation, dynamics, and challenges[J]. Acta Applicandae Mathematicae, 2015, 137(1): 123–157. DOI:10.1007/s10440-014-9993-x |
| [20] | Demetriou M A. Guidance of mobile actuator-plus-sensor networks for improved control and estimation of distributed parameter systems[J]. IEEE Transactions on Automatic Control, 2010, 55(7): 1570–1584. DOI:10.1109/TAC.2010.2042229 |