



2. 西安科技大学电气与控制工程学院, 西安 710049
2. School of Electrical and Control Engineering, Xi'an University of Science and Technology, Xi'an 710049, China
0 引言
脑机接口(brain machine interface,BMI或brain computer interface,BCI)是一种人机结合的系统.近年来发展异常迅速,人们可以通过脑机接口技术不依赖于正常的外周神经和肌肉输出通道向外界输出信息,达到和外界进行信息交流的需求.脑机接口[1-4]不仅能够帮助患者通过思维实现对环境控制、轮椅控制或对外交流,同时也可以使得患者主动参与一些康复训练,提高其生活自理能力,进而不断提高他们的生活质量;此外,脑机接口的研究过程同时也是人类对自身大脑不断认识的过程,为人类了解大脑,从而为保护脑、创造脑提供基础.
在脑机接口技术的研究中,基于脑机接口的运动意图信息提取及人造假肢系统设计已经被广泛研究[6-10].在已有的研究工作中,线性和非线性解码器[11]已经被用在了人机交互的研究中.在这些解码器的设计中,最常采用的是基于维纳滤波器(WF)[7],卡尔曼滤波(KF)[9],速度卡尔曼滤波(VKF)[10]设计线性解码器及采用递归神经网络(RNN)[10]、人工神经网络(ANN)[11]算法设计的非线性解码器.但这些解码器的设计精度较低,使用Bullock提出的神经元皮层放电模型构造闭环BMI系统时发现其效果并不理想.鉴于所设计的解码器的非线性特性,本文的研究采用自适应ESN设计非线性解码器并引入FORCE算法用于更新输出权值WO以提高解码器对运动信息解码的精度.为了设计最优人工本体反馈以恢复受试者在自然本体反馈缺失的情况下的运动任务,Kumar等采用滚动时域优化算法[7]设计最优人工本体反馈,其后潘红光等人采用模型预测控制算法设计最优人工本体反馈信息以构成闭环脑机接口系统[8],但这些控制器的设计并没有准确反映系统的非线性特性,出现控制精度低、容错性差等特点.本文采用基于遗传算法LS-SVM的直接逆模型控制设计最优人工反馈信号,同时引入遗传算法用于优化LS-SVM核函数参数以弥补由于大脑的受损部分而造成的信息缺失.
1 自发单关节运动任务模型本文及文[6-8]的研究均基于Bullock提出的心理生理皮层电路模型[5],大脑生理皮层电路模型如图 2所示.文[7]对运动相关生理皮层电路模型做出了详尽的阐述,本文的研究沿用了文[7]的数据符号定义及仿真数据集的生成过程进行自发单关节运动的仿真实验,后文主要阐述本文所作的研究.

|
| 图 1 闭环脑机接口结构图 Figure 1 Structure diagram of the closed-loop BMIs |

|
| 图 2 大脑生理皮层电路模型 Figure 2 Brain physiological cortical circuit model |
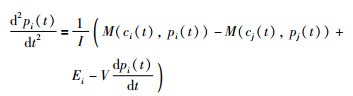
实验研究的单关节运动任务模型是基于关节上的主动肌和与之对应的抗拒肌进行运动控制,通过对这两块肌肉间接控制肢体关节运动路线.这两块肌肉肢体的控制模型定义为
|
(1) |
在这个模型中,pi表示主动肌当前位置,与之相对应的抗拒肌pj的位置关系为pi+pj=1,由此可以得出两块肌肉的位置;

|
(2) |
肌肉函数主要依赖于肌肉的长度Li、收缩水平Mi和肌肉的剩余长度Γi.定义Li=1-pi,Γi=1-ci,将肌肉函数简化为

|
(3) |
收缩活动ci的表达式为

|
(4) |
式中,αi代表脑电信号中的阿尔法波活动频率,v是收缩水平ci的一个缩放比例常数.
通过对单关节运动模型及大脑生理皮层电路模型进行仿真,本文共进行了1 500次独立自发的单关节仿真实验,采集到219 000组数据,收集到的数据集将用于完成对解码器以及最优人工本体反馈信息的设计.
2 解码器设计基于神经生理学和人机交互的实验研究表明,大脑皮层4区神经元放电活动与运动任务相关的编码信息联系密切.从大脑皮层区域4中的期望速度矢量模块(DVV)、流出位置矢量模块(OPV)、流出力和位置矢量模块(OFPV)神经元的放电活动中提取主动肌和对应的对抗肌的总力差ΔM(k),用于完成对解码器的设计.
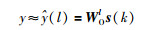
2.1 基于回声状态网络的解码器设计回声状态网络(echo state network,ESN)[12]是一种新型的递归神经网络,回声状态网络在非线性系统辨识方面较传统的递归神经网络有较大的改进. 图 3为回声状态网络的拓扑结构,通过调整输出权值,使得网络输出
|
(5) |

|
| 图 3 回声状态网络(ESN)拓扑结构 Figure 3 Topology of the echo state network (ESN) |
式中,

|
(6) |

|
(7) |

|
(8) |

|
(9) |

|
(10) |

|
(11) |

|
(12) |

|
(13) |

|
(14) |

|
(15) |
其中,Wres、WI、WF分别表示状态变量、输入变量和输出变量对状态变量的连接权矩阵;Wres为M×M维权值矩阵,M表示回声状态网络储备池的规模,矩阵每一行随机选择m < M个非零元素服从0均值、方差为


|
(16) |
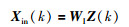
对于采集到的数据集,令z1=yi,z2=yj,z3=ui,z4=uj,z5=ai,z6=aj.在本文中,设定延时单元的数目D=10,得到网络输入矩阵:
|
(17) |
式中,N表示输入网络参数的个数;本文中,N=6,M=1 000,L=1.故本文中ESN权重向量WI是一个1 000×60的向量.设定回声状态网络参数h=0.3,g=0.5,σ=0.025,m=100,i=8;α-1为初始化学习率值,α-1=0.01.本方案采用记录的综合数据集中的200 000个采样点数据来训练基于ESN设计的解码器,使用剩下的数据中的500个采样值来验证解码器的性能.
2.2 基于自适应维纳滤波器的解码器设计在基于自适应维纳滤波器(WF)的线性解码器设计中,表示ΔM(k)和平均放电活动之间的联系为

|
(18) |
式中,W为(D×N)×1维的权重向量.基于自适应WF设计的线性解码器的输入采用式(16)的形式,在这里N=6,D=10.因此,权重向量W是一个60×1维的向量.
设计的解码器,采用归一化最小方差算法:

|
(19) |
式中,η∈(0,2),β是一个小正常数,e(k)定义为ΔM(k)在实际系统存在本体反馈时的记录值与离线解码器系统训练输出值的差值.式(19)中的参数设置为η=0.01,β=1.使用采样点数据来训练权重向量W,训练以后保存最终的权值.最后,使用剩下的数据验证解码器的性能.
2.3 解码器仿真结果通过Matlab仿真得到离线的解码器的仿真效果,如图 4(a)所示. 图 4(b)为WF解码器和ESN解码器的绝对误差累计.

|
| 图 4 解码器训练效果 Figure 4 Decoder training effect |
由图 4的仿真效果可以发现,基于回声状态网络设计的解码器性能明显优于自适应WF设计的线性解码器.本文在后续的研究中采用基于回声状态网络设计最优解码器.
3 脑机接口系统框架构建通过以上的解码器的成功构建,现将其运用于对开环BMI系统单关节自发运动任务的控制,研究开环BMI系统在无自然本体反馈条件下,所设计的解码器对存在自然本体反馈的闭环脑机接口系统单关节自发运动任务[14-15]的恢复情况,如图 5所示.

|
| 图 5 实际系统和开环BMI系统 Figure 5 The real system and the open-loop BMI system |
从图 5(a)可以看出,对于一个实际的系统来说,无论系统是否存在自然本体反馈,系统均能够完成指定的关节运动轨迹跟踪实验,结果与先前的神经生理实验一致[13],表现为训练的猴子(在没有视觉反馈的情况下)可以在存在和不存在自然本体反馈的情况下达到期望的目标位置.从图 5(b)可以得出,将基于ESN离线设计的解码器运用于无自然本体反馈的开环BMI系统,开环BMI系统的性能出现明显的退化,无法完成对闭环期望轨迹的跟踪.同时,大脑皮层4区DVV、OPV、OFPV神经元的放电活动[11]对应的ui(t)、yi(t)、ai(t)也出现了显著的变化.由于设计的解码器的输出权值矩阵无法适应大脑皮层[15-16]运动相关4区神经元放电率的显著变化,在无本体反馈的情况下,性能出现了明显的退化.为了能够恢复解码器在无本体反馈情况下的闭环脑机接口系统的性能,需要通过设计最优人工本体反馈以刺激大脑皮层5区运动相关神经元,具体设计方法见图 6的闭环BMI系统电路模型.

|
| 图 6 闭环脑机接口系统电路模型 Figure 6 Circuit model of the closed-loop BMI system |
本节将基于遗传算法的最小二乘支持向量机[17-18](least squares support vector machines,LS-SVM)算法设计直接逆模型控制器,以产生人工本体反馈恢复闭环脑机接口的性能,并将设计的直接逆模型控制结果与采用滚动时域优化算法(RHC)[7]及神经网络比例—积分—微分(proportion-integration-differentiation,PID)[19]设计的控制器的控制结果作对比.
3.1.1 基于LS-SVM的直接逆模型控制的设计LS-SVM是Suykens提出的一种改进的支持向量机,它采用等式约束代替支持向量机中不等式约束,通过求解一组等式方程得到了参数的解析解,从而避免了在对偶空间中求解二次规划问题.本文采用式(20)的径向基核函数作为LS-SVM的核函数,完成控制问题.由于核函数参数γ,σ选取对实验效果影响较大,本文采用了遗传算法[20]来寻找最优核参数:

|
(20) |
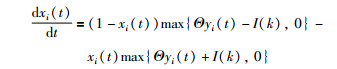
现通过研究式(21)在脑机接口闭环单关节中的控制作用来分析其产生的若干问题,即通过设计最优人工本体反馈[14]刺激I(k+l|k),以恢复闭环脑机接口性能.其中,Θ表示恒定增益.
|
(21) |
对于一般的单输入单输出的非线性系统辨识问题可以用式(22)~式(23)来描述:
|
(22) |

|
(23) |
式中,y为系统输出,I为系统输入,n为系统阶次,m为输入延迟,f为非线性函数.如果系统式(22)可逆,现将求解的非线性系统辨识问题通过式(23)求解逆模型.通过基于遗传算法LS-SVM对系统进行逆系统建模[20]的过程中,系统的结构采用式(23)的结构,由于在模型中不存在反馈,为了保证辨识模型的收敛性和稳定性,利用系统的输入输出数据作为辨识信息对基于遗传算法LS-SVM辨识系统进行训练,模型结构如图 7所示.现利用式(24)及式(25)构造系统辨识输入输出数据集:
|
(24) |

|
| 图 7 系统逆模型辨识建模结构 Figure 7 Modeling of inverse model identification |
本研究的系统输出阶次为2,输入阶次为1;y(k)为大脑皮层位置矢量模块(PPV)神经元实时放电活动离散值;I(k)为自然本体状态下的反馈作用信息.现将输入输出参数按如下等式初始化,得到系统辨识逆模型的输入输出:

|
(25) |
本文的控制系统训练数据通过式(24)、式(25)构造了20 000组训练数据,并用500组数据来验证逆模型构建的准确性.经计算均方根误差为5.919×10-4,训练效果如图 8所示.

|
| 图 8 逆模型控制器训练效果 Figure 8 The training effect of inverse model controller |
现将基于遗传算法LS-SVM逆模型与脑机接口控制系统模型复合,可以实现其直接逆模型控制,如图 9所示.假设H为训练得到的基于遗传算法LSSVM的逆模型控制器,逆模型控制器H的实际输入输出可表示为

|
(26) |

|
| 图 9 基于遗传算法LSSVM的逆模型结构 Figure 9 Inverse model structure based on genetic algorithm LS-SVM |
对上述推导归纳总结,基于遗传算法LS-SVM设计的直接逆模型控制执行步骤为:
1) 初始化系统的输入输出和训练参数,利用式(24)和式(25)构造训练样本,使用基于遗传算法LS-SVM训练系统的逆模型控制器H.
2) 选定参考输入y(k+1),初始化I(1)=0.
3) 根据式(26)计算H的输出I(k),再根据式(21)计算被控对象的输出xi(t).
如果需要停止控制,就退出;否则k=k+1,进入步骤3).
3.1.2 基于RHC人工本体反馈控制的设计对于图 6所示的闭环脑机接口系统,使用基于模型的最优滚动时域优化控制(RHC)策略[7],并应用式(27)解决控制问题:

|
(27) |
其中,I(k+l|k)(l=0,1,…,NC)代表设计的人工本体反馈输入,O(k|k)表示在k时刻关节主动肌实际的运动感知位置,R(k|k)代表在k时刻关节主动肌期望的运动感知位置,在本文的仿真中控制域NC取值为5,预测域NP取值为30,通过(式(28)~式(30))求解最优人工本体反馈控制作用I(k).

|
(28) |

|
(29) |

|
(30) |
对于图 6所示的闭环脑机接口系统,使用神经网络PID算法(BP-PID)[19]设计最佳人工反馈,并将网络作初始化.
本文BP神经网络采用3层BP结构,它有4个输入节点Xin(k)(式(31)),10个隐含节点,3个输出节点.输出节点分别对应PID控制器的3个参数kP、kI、kD,由于kP、kI、kD不能为负,所以输出层神经元激活函数取非负的Sigmoid函数.

|
(31) |

|
(32) |
其中,Xin(k)为网络输入,xi(k)为系统k时刻关节主动肌实际的运动感知位置,xt(k)为实际系统k时刻关节主动肌期望的运动感知位置.现针对本文基于BP-PID的控制器设计,将文[19]中BP-PID控制算法用于初始化本文BP网络各层权系数的初值,选定学习率η=0.2,惯性系数γ=0.5,通过(式(32))计算网络输出误差进行神经网络学习,在线调整加权系数,实现PID控制参数的自适应调整.
3.2 闭环脑机接口控制效果通过Matlab仿真,分别得到基于遗传算法LS-SVM直接逆模型、RHC、BP-PID设计的人工本体反馈进行自发单关节运动任务恢复实验,实验结果如图 10(a)~图 10(c)所示.

|
| 图 10 基于人工本体反馈对单关节运动任务的恢复 Figure 10 The effect of task recovery based on the artificial proprioception sensory feedback |
图 10(a)至~图 10(c)分别表示为:大脑皮层PPV模块输出、系统控制作用输出及肌体主动肌输出. 图 10(d)反映的是基于控制器构建人工本体反馈构成的闭环BMI系统,产生的大脑皮层PPV模块实际输出分别与期望输出之间的绝对误差累计对比.
通过式(33)计算闭环脑机接口解码器系统、控制器系统的性能指标:
|
(33) |
得到闭环脑机接口系统框架性能分析参数,如表 1所示.
通过图 10(a)~图 10(d)的实验控制效果及表 1的性能分析发现,本文设计的基于遗传算法LS-SVM设计的最佳人工本体反馈能够准确恢复在缺乏自然本体反馈信息的情况下进行的单关节自发运动任务,并且其控制效果明显优于基于RHC及BP-PID设计的人工本体反馈的控制效果.
4 总结本论文的研究中,首先通过对脑机接口单关节自发运动任务相关的皮层神经元模型进行仿真,获取存在自然本体反馈时大脑皮层运动感觉区的放电活动数据集.其次通过使用采集到的神经元放电活动数据集对基于ESN设计的解码器进行训练、测试,并与基于自适应WF设计的线性解码器的性能进行对比,然后通过使用不存在自然本体反馈时运动感觉区的神经元放电活动数据集及基于ESN设计的解码器,进行开环脑机接口单关节自发运动任务实验,发现其性能出现了显著的下降,无法恢复本体单关节自发运动任务.在这种情况之下,为了能够恢复解码器的性能,需要通过设计最优人工本体反馈以刺激大脑皮层5区运动相关神经元.本文采用了基于遗传算法LS-SVM设计直接逆模型控制器来产生人工激励电流反馈刺激大脑皮层5区运动相关神经元,以恢复在单关节自发运动任务中的闭环脑机接口的性能.最后,本文又将基于遗传算法LS-SVM设计的直接逆模型控制器与RHC及BP-PID设计的控制器在对单关节自发运动任务的恢复效果进行了对比,发现基于遗传算法LS-SVM设计的最佳人工本体反馈控制效果明显优于基于RHC及BP-PID设计的人工本体反馈的控制效果.
通过使用外部控制器设计最优人工本体反馈,刺激大脑皮层跟踪皮质感觉神经元放电率是恢复存在自然本体反馈时自发运动任务的适当方法.这也为当系统模型未知时,根据对象的输入输出数据恢复闭环系统的性能提供了新的研究思路.
| [1] |
吴强, 张琴, 熊蔡华.
功能性电刺激下的关节自适应运动控制研究[J]. 自动化学报, 2016, 42(12): 1923–1932.
Wu Q, Zhang Q, Xiong C H. Study on adaptive motion control of joints under functional electrical stimulation[J]. Acta Automatica Sinica, 2016, 42(12): 1923–1932. |
| [2] | Chung E J, Kim J H, Park D S, et al. Effects of brain-computer interface-based functional electrical stimulation on brain activation in stroke patients:A pilot randomized controlledtrial[J]. Journal of Physical Therapy Science, 2015, 27(3): 559. DOI:10.1589/jpts.27.559 |
| [3] | Rahman K A A, Ibrahim B S K K, Jamil M M A, et al. Positioning of EEG electrodes for BCI-FES control system development of knee joint movement for paraplegic[C]//Functional Electrical Stimulation Society Conference. Piscataway, NJ, USA: IEEE, 2015: 1-6. |
| [4] | Florian G, Armin W, Martin S, et al. Hybrid neuroprosthesis for the upper limb:Combining brain-controlled neuromuscular stimulation with a multi-joint arm exoskeleton[J]. Frontiers in Neuroscience, 2016, 10(36): 367–377. |
| [5] | Bullock D, Cisek P, Grossberg S. Cortical networks for control of voluntary arm movements under variable force conditions[J]. Cerebral Cortex, 1998, 8(1): 48–62. DOI:10.1093/cercor/8.1.48 |
| [6] | García-Córdova F. A cortical network for control of voluntary movements in a robot finger[J]. Neurocomputing, 2007, 71(1): 374–391. |
| [7] | Kumar G, Schieber M H, Thakor N V, et al. Designing closed-loop brain-machine interfaces using optimal receding horizon control[C]//American Control Conference. Piscataway, NJ, USA: IEEE, 2013: 5029-5034. |
| [8] | Pan H, Ding B, Zhong W, et al. Designing closed-loop brain-machine interfaces with network of spiking neurons using MPC strategy[C]//American Control Conference. Piscataway, NJ, USA: IEEE, 2015: 2543-2548. |
| [9] | Pan H G, Wang M, Wang Z Y, et al. The performance comparison of two kinds of decoders in brain-machine interface[C]//International Symposium on Computer, Consumer and Control. Piscataway, NJ, USA: IEEE, 2016: 247-250. |
| [10] | Sussillo D, Nuyujukian P, Fan J M, et al. A recurrent neural network for closed-loop intracortical brain-machine interface decoders[J]. Journal of Neural Engineering, 2012, 9(2): 026027. DOI:10.1088/1741-2560/9/2/026027 |
| [11] | Wolpaw J R, Mcfarland D J, Bizzi E. Control of a two-dimensional movement signal by a noninvasive brain-computer interface in humans[J]. Proceedings of the National Academy of Sciences of the United States of America, 2004, 101(51): 17849–17854. DOI:10.1073/pnas.0403504101 |
| [12] |
单毅.回声状态网络算法改进及其应用[D].南京: 南京信息工程大学, 2016. Shan Y. Improvement of echo state network algorithm and its application[D]. Nanjing: Nanjing Information Engineering University, 2016. |
| [13] | Bizzi E, Accornero N, Chapple W, et al. Posture control and trajectory formation during arm movement[J]. The Journal of Neuroscience, 1984, 4(11): 2738–2744. DOI:10.1523/JNEUROSCI.04-11-02738.1984 |
| [14] | Hill D N, Curtis J C, Moore J D, et al. Primary motor cortex reports efferent control of vibrissa motion on multiple timescales[J]. Neuron, 2011, 72(2): 193–196. DOI:10.1016/j.neuron.2011.10.002 |
| [15] | Shanechi M M. Brain-machine interface control algorithms[J]. IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2017, 25(10): 1725–1734. |
| [16] | Brette R, Rudolph M, Carnevale T, et al. Simulation of networks of spiking neurons:A review of tools and strategies[J]. Journal of Computational Neuroscience, 2007, 23(3): 349–398. DOI:10.1007/s10827-007-0038-6 |
| [17] |
李琨, 韩莹, 黄海礁.
基于IBH-LSSVM的混沌时间序列预测及其在抽油井动液面短期预测中的应用[J]. 信息与控制, 2016, 45(2): 241–247.
Li K, Han Y, Huang H J. Chaotic time series prediction based on IBH-LSSVM and its application to short-term prediction of dynamic fluid level in oil wells[J]. Information and Control, 2016, 45(2): 241–247. |
| [18] | Cai Z, Xu W, Meng Y, et al. Prediction of landslide displacement based on GA-LSSVM with multiple factors[J]. Bulletin of Engineering Geology and the Environment, 2016, 75(2): 637–646. DOI:10.1007/s10064-015-0804-z |
| [19] |
李中华, 张泰山, 周翔.
电液伺服系统可拓自适应PID控制策略研究[J]. 信息与控制, 2016, 45(4): 415–420.
Li Z H, Zhang T S, Zhou X. Research on extension-adaption PID control strategy for electro-hydraullic servo system[J]. Information and Control, 2016, 45(4): 415–420. |
| [20] | Kobayashi T, Simon D L. Hybrid neural-network genetic-algorithm technique for aircraft engine performance diagnostics[J]. Journal of Propulsion & Power, 2015, 21(4): 751–758. |